MATEK Mateksys 비행 컨트롤러 F405-VTOL
MATEK Mateksys 비행 컨트롤러 F405-VTOL
MATEKSYS
픽업 사용 가능 여부를 로드할 수 없습니다.
MATEK Mateksys 비행 컨트롤러 F405-VTOL 사양
용도: 차량 및 원격 조종 장난감
권장 연령: 12+y,14+y,3-6y,6-12y,0-3y
원산지: 중국 본토
재료: 복합 재료
브랜드 이름: MATEKSYS
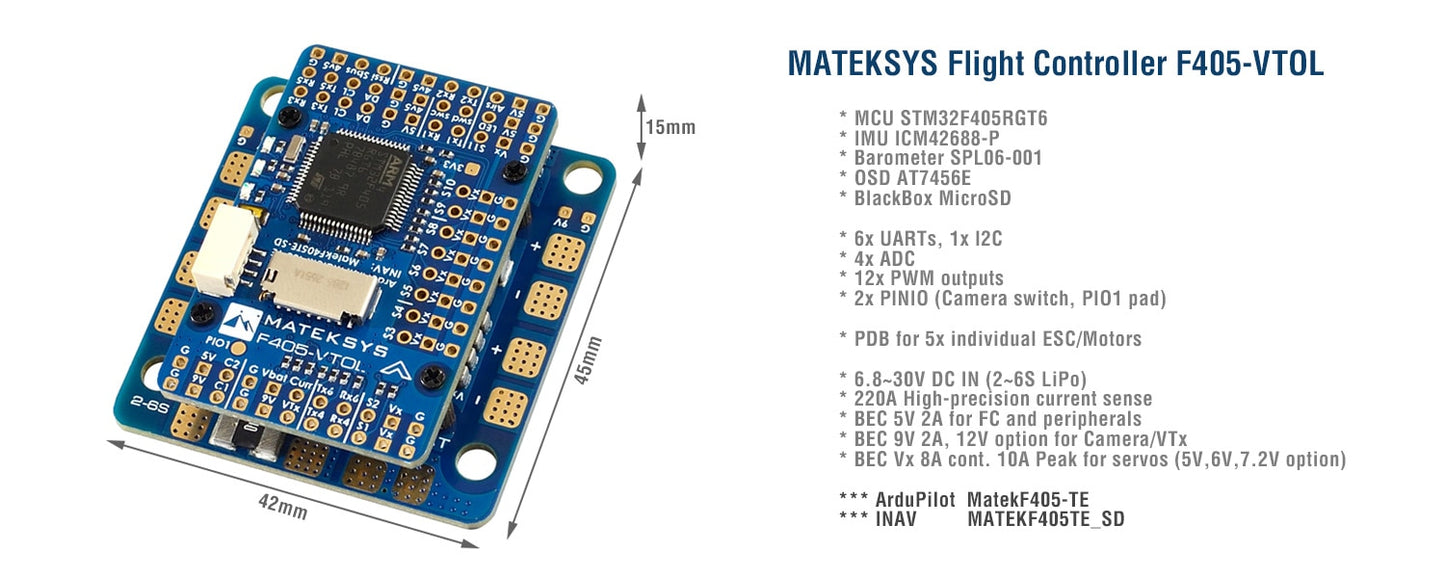
비행 컨트롤러 F405-VTOL STM32F405RGT6, ICM42688P, SPL06, OSD, VTOL PDB, 6xUART, 12x PWM, 1xI2




FC 사양
-
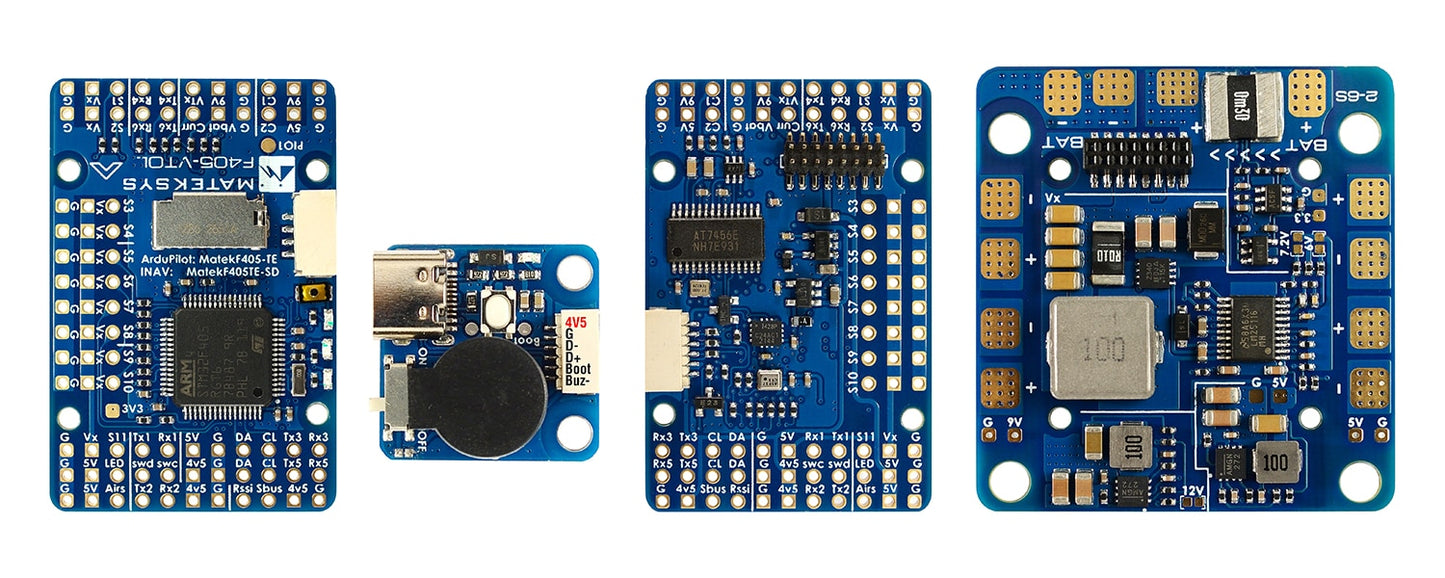
MCU: STM32F405RGT6, 168MHz, 1MB 플래시
-
IMU: ICM42688-P
-
바로: SPL06-001
-
OSD: AT7456E
-
블랙박스: MicroSD 카드 슬롯
-
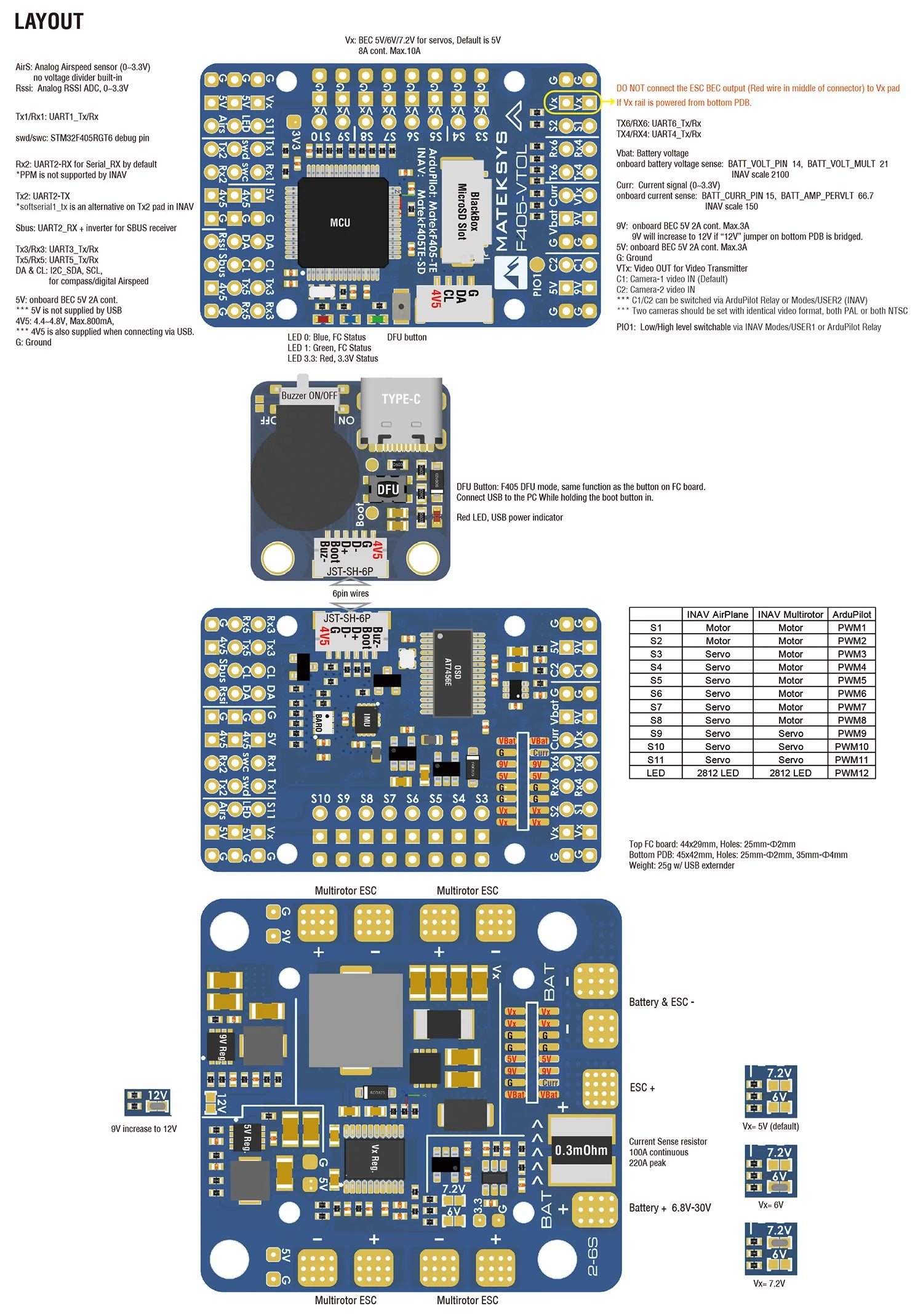
6x UART, 1x Softserial_Tx 옵션(INAV)
-
12x PWM 출력
-
1x I2C
-
4x ADC(VBAT, 전류, RSSI, 대기 속도)
-
1x 예비 PINIO
-
C형 USB/경고음 확장기(USB2.0)
-
SBUS 입력용 UART2-RX에 인버터 내장
-
전환 가능한 듀얼 카메라 입력
FC 펌웨어
-
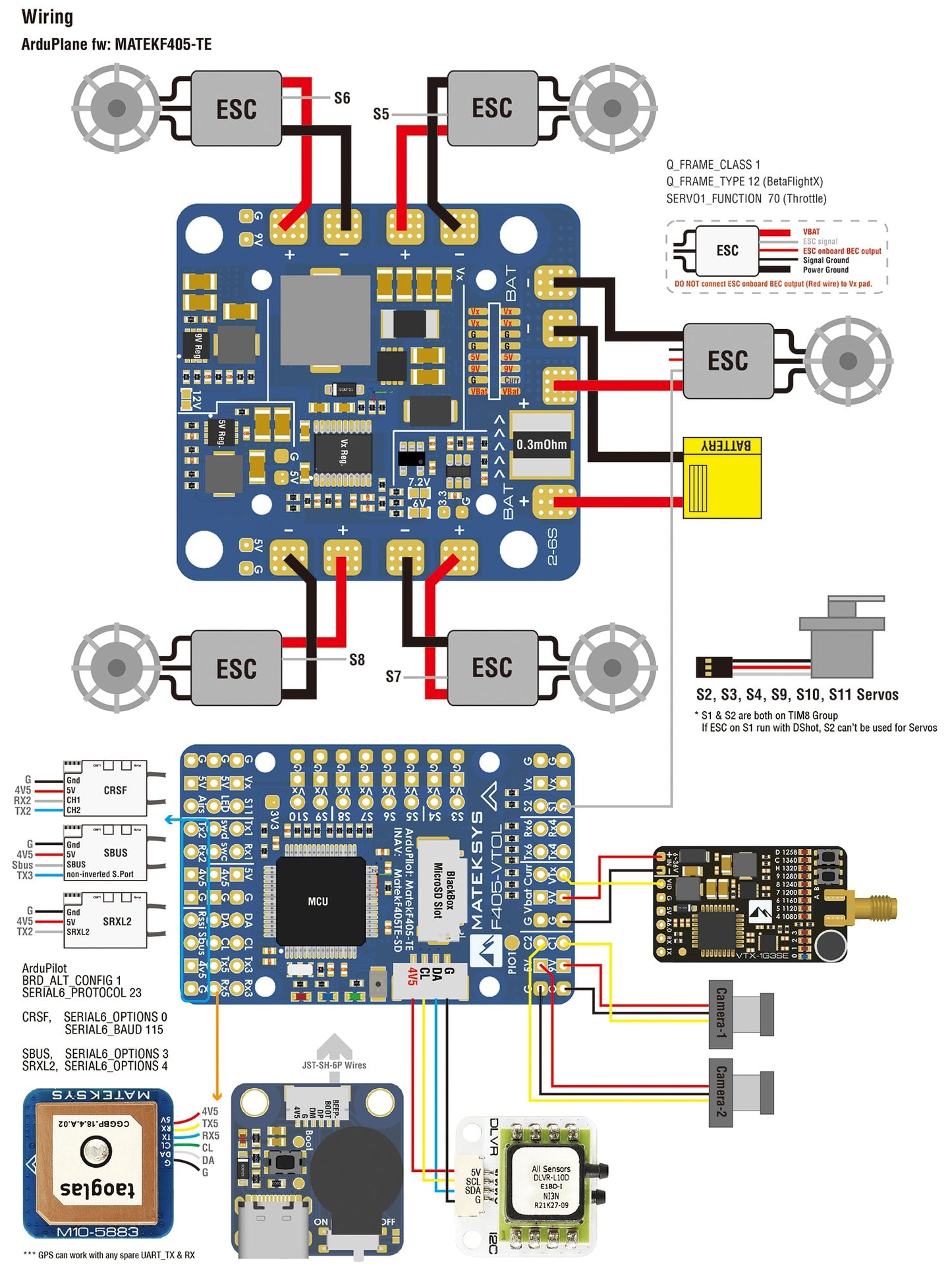
ArduPilot: MatekF405-TE
-
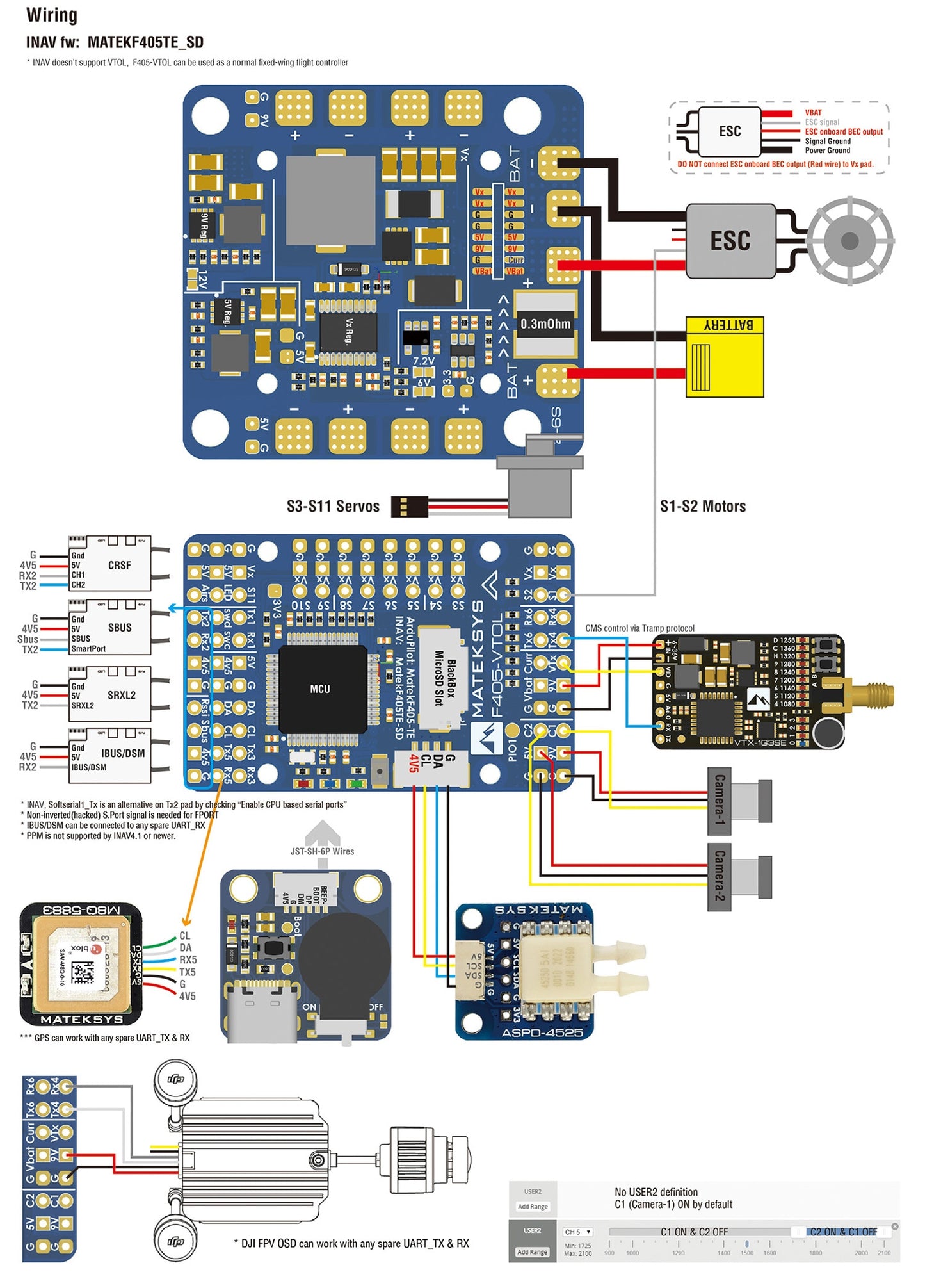
INAV: MATEKF405TE_SD(INAV 5.0 이상)
PDB
-
입력 전압 범위: 6.8~30V(2~6S LiPo)
-
감지 저항기: 연속 100A, 피크 220A
-
5x ESC 전원 패드, 총 100A 연속
-
전류 센서 저항 근처의 ESC 패드에서 최대 100A의 연속 부하 지원
-
쿼드콥터의 각 ESC 패드에서 최대 30A 및 최대 50A의 연속 부하 지원
-
배터리 전압 분배기 1K:20K(INAV의 스케일 2100, ArduPilot의 BATT_VOLT_MULT 21.0)
-
현재 센서: 220A, 3.3V ADC(INAV에서 스케일 150, ArduPilot에서 66.7 A/V)
BEC 5V 출력
-
비행 컨트롤러, 수신기, OSD, 카메라, 버저, 2812 LED_스트립, 버저, GPS 모듈, AirSpeed용으로 설계됨
-
연속 전류: 2A
BEC 9V /12V 출력
-
비디오 송신기, 카메라, 짐벌 등을 위해 설계되었습니다.
-
연속 전류: 2A
-
점퍼 패드가 있는 12V 옵션
-
안정적인 9V/12V 출력을 위해 입력 전압은 > 출력 전압 +1V여야 합니다
BEC Vx 출력
-
서보용으로 설계
-
전압 조정 가능, 기본 5V, 점퍼를 통해 6V 또는 7.2V
-
연속 전류: 8A, 10A 피크
-
안정적인 Vx 출력을 위해 입력 전압은 Vx 전압 +1V보다 커야 합니다
BEC 3.3V 출력
-
Baro/Compass 모듈 및 외부 3용으로 설계되었습니다.3V 주변기기
-
리니어 레귤레이터
-
연속 전류: 200mA
물리적
-
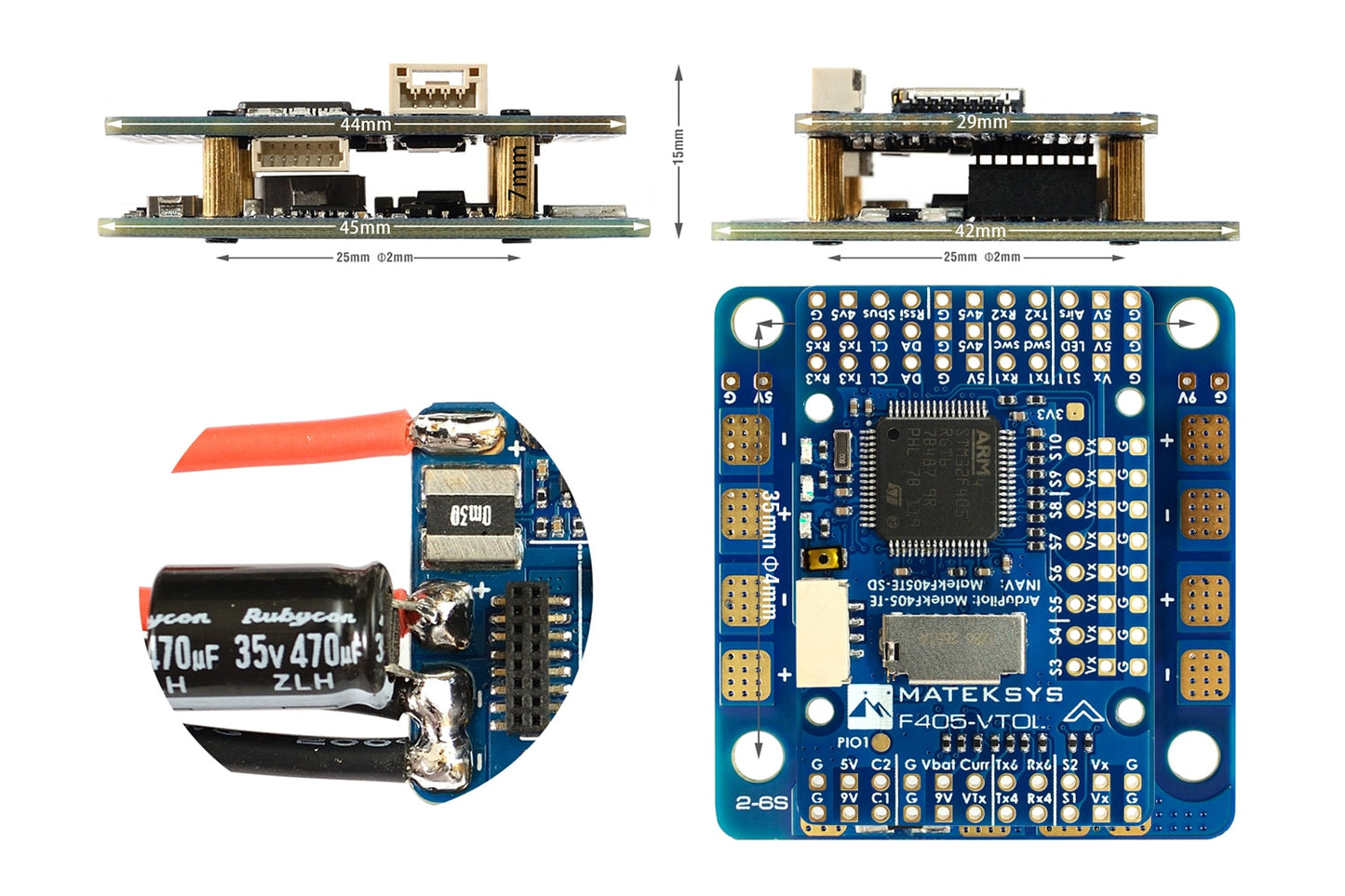
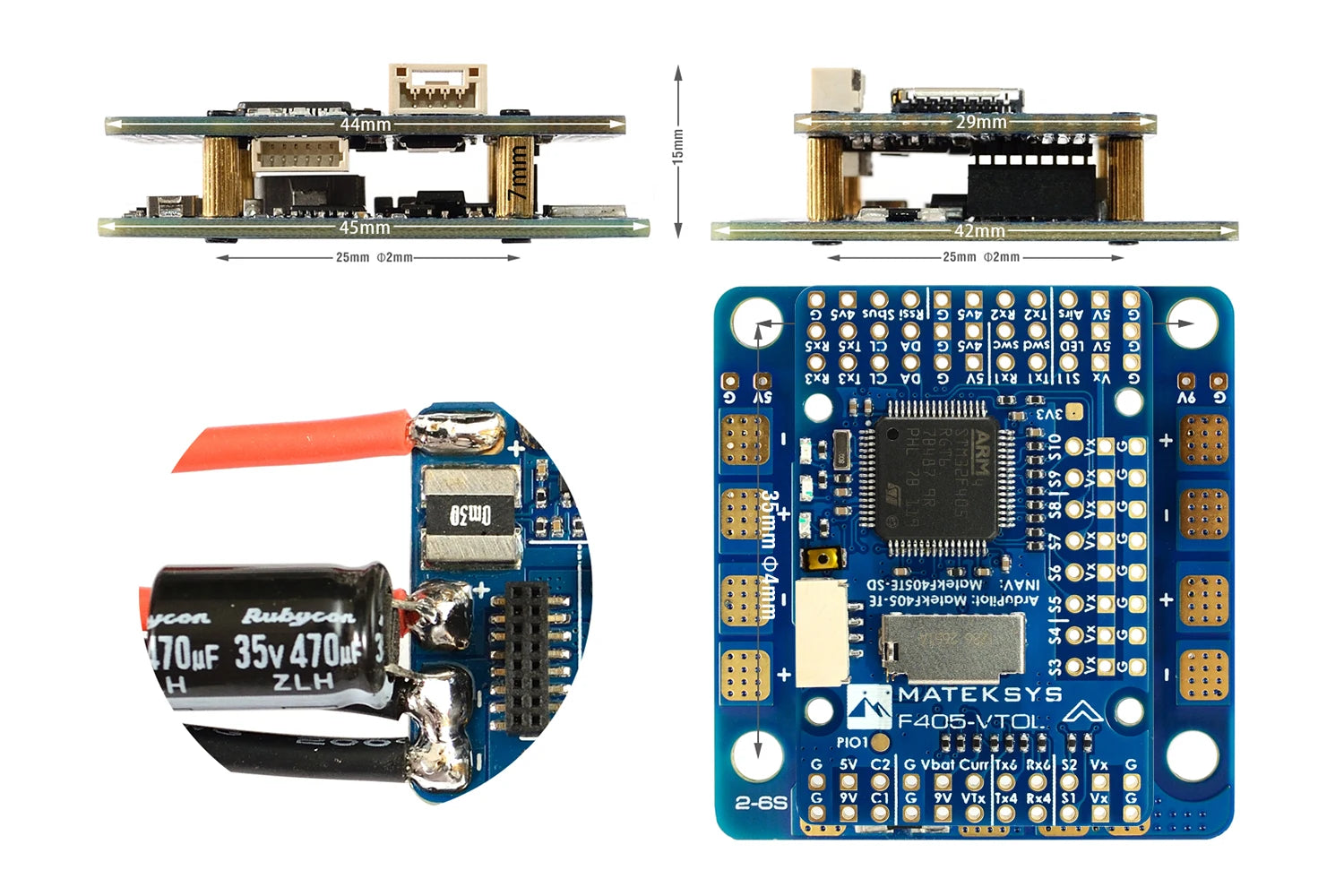
장착: 25 x 25mm-Φ2mm, 35 x 35mm- Φ4mm
-
크기: 45 x 42 x 15mm
-
무게: 25g(USB/버저 어댑터 포함)
포함
-
1x F405-VTOL
-
1x USB(Type-C)/경고음(패시브 버저) 연장기 + USB 연장기용 JST-SH-6P-JST-SH-6P 케이블 20cm.
-
1x 20cm JST-GH-4P - I2C 포트용 JST-GH-4P 케이블
-
1x Rubycon ZLH 35V 470uF 커패시터
-
Dupont 2.54핀 (보드는 납땜되지 않은 상태로 배송됩니다)
팁
-
F405-VTOL에는 INAV fw QC용으로 사전 로드됨
-
대상 MATEKF405TE_SD은 INAV 구성자 4.x.x에 나열되지 않으며 INAV5.0 이상에서 지원됩니다.
-
ArduPilot fw, SD 카드 로깅을 위해 LOG_BACKEND_TYPE = 1(파일) 설정
Related Collections