MATEK F405-WTE - Mateksys 비행 컨트롤러
MATEK F405-WTE - Mateksys 비행 컨트롤러
MATEKSYS
픽업 사용 가능 여부를 로드할 수 없습니다.
MATEK F405-WTE - Mateksys 비행 컨트롤러 사양
용도: 차량 및 원격 조종 장난감
권장 연령: 12+y,14+y
원산지: 중국 본토
재료: 복합재료
브랜드 이름: MATEKSYS
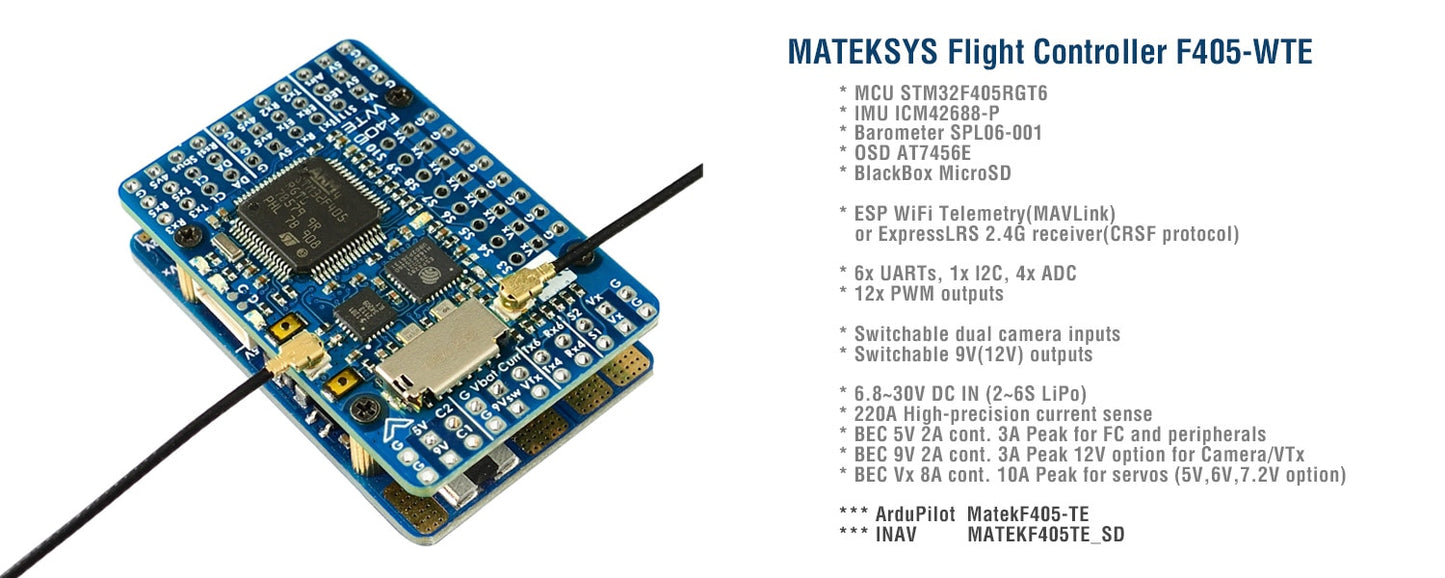
비행 컨트롤러 F405-WTE
STM32F405RGT6, ICM42688P, SPL06, OSD, ESP WIFI 원격 측정/ELRS 2.4G 수신기, 6xUART, 12x PWM,1xI2C
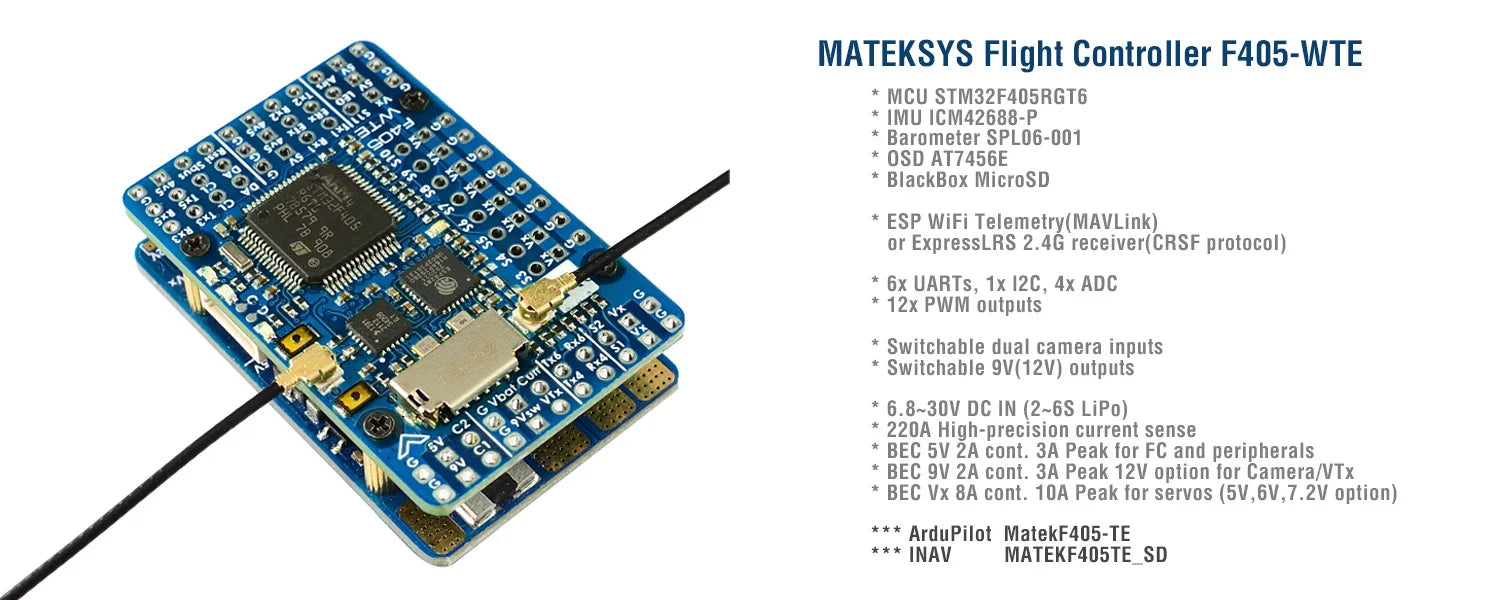
MATEKSYS 비행 컨트롤러 F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P 기압계 SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi Telemetry(MAVLink) 2 또는 ExpressLRS 2.4G 수신기(CRSF 프로토콜) 6x UART, Ix I2C, 4x ADC 85 12x PWM 출력 전환 가능한 듀얼 카메라 입력 4+

FC 사양
-
MCU: STM32F405RGT6, 168MHz, 1MB 플래시
-
IMU: ICM42688-P
-
바로: SPL06-001
-
OSD: AT7456E
-
블랙박스: MicroSD 카드 슬롯
-
ESP WiFi 원격 측정(MAVLink, 14dBm)
-
ExpressLRS 2.4G 수신기(CRSF 프로토콜, 원격 측정 12dBm)
-
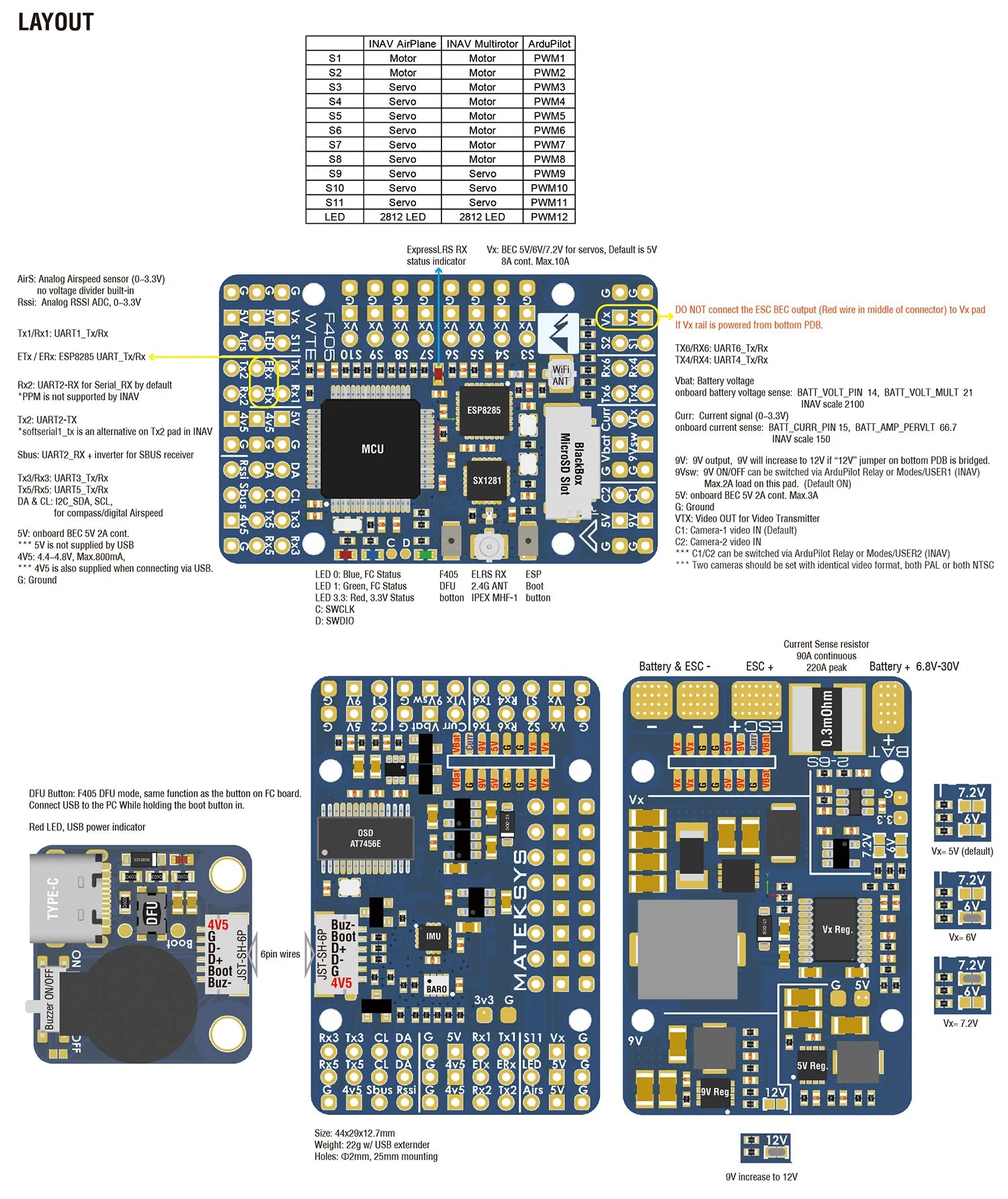
6x UART, 1x Softserial_Tx 옵션(INAV)
-
12x PWM 출력
-
1x I2C
-
4x ADC(VBAT, 전류, RSSI, 대기 속도)
-
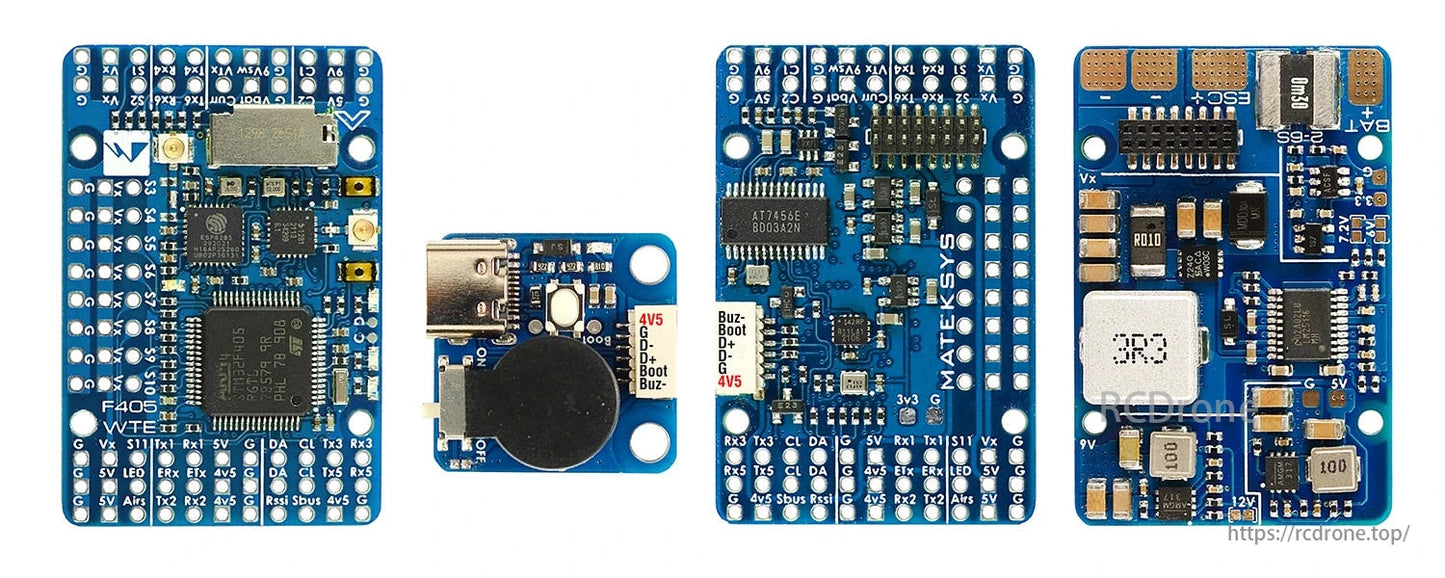
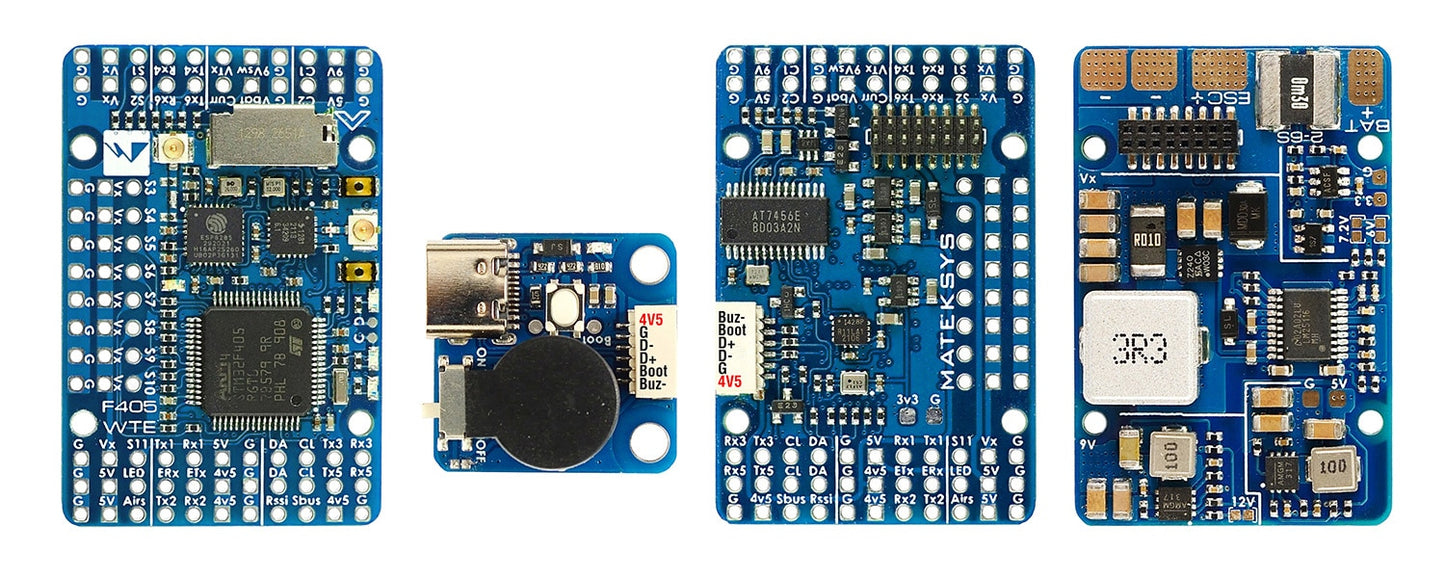
C형 USB/경고음 확장기(USB2.0)
-
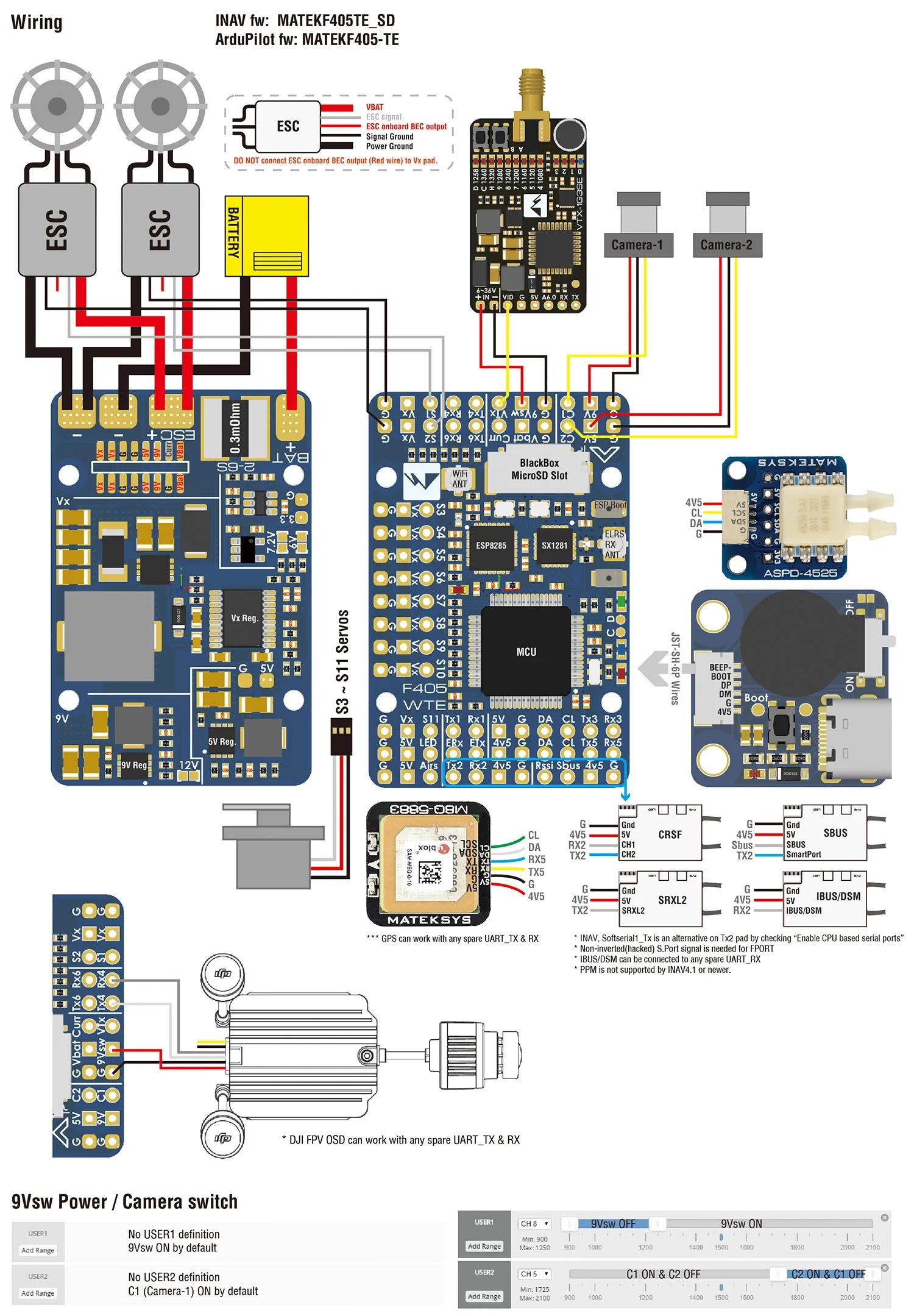
듀얼 카메라 입력 스위치
-
VTX 전원 스위치용 9V(12V)
FC 펌웨어
-
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD(INAV 구성자 4.x에서는 사용할 수 없음)
PDB
-
입력 전압 범위: 6.8~30V(2~6S LiPo)
-
1x ESC 파워 패드
-
배터리 전압 분배기 1K:20K(INAV의 스케일 2100, ArduPilot의 BATT_VOLT_MULT 21.0)
-
현재 센서: 220A, 3.3V ADC(INAV에서 스케일 150, ArduPilot에서 66.7 A/V)
-
감지 저항기: 연속 90A, 피크 220A
BEC 5V 출력
-
비행 컨트롤러, 수신기, OSD, 카메라, 버저, 2812 LED_스트립, 버저, GPS 모듈, AirSpeed용으로 설계됨
-
연속 전류: 2암페어, 최대 3A
BEC 9V /12V 출력
-
비디오 송신기, 카메라, 짐벌 등을 위해 설계되었습니다.
-
연속 전류: 2암페어, 최대 3A
-
점퍼 패드가 있는 12V 옵션
-
안정적인 9V/12V 출력을 위해 입력 전압은 > 출력 전압 +1V여야 합니다
BEC Vx 출력
-
서보용으로 설계
-
전압 조정 가능, 기본 5V, 점퍼를 통해 6V 또는 7.2V
-
연속 전류: 8암페어, 최대 10A
-
안정적인 Vx 출력을 위해 입력 전압은 Vx 전압 +1V보다 커야 합니다
BEC 3.3V 출력
-
Baro/Compass 모듈 및 외부 3용으로 설계되었습니다.3V 주변기기
-
리니어 레귤레이터
-
연속 전류: 200mA
물리적
-
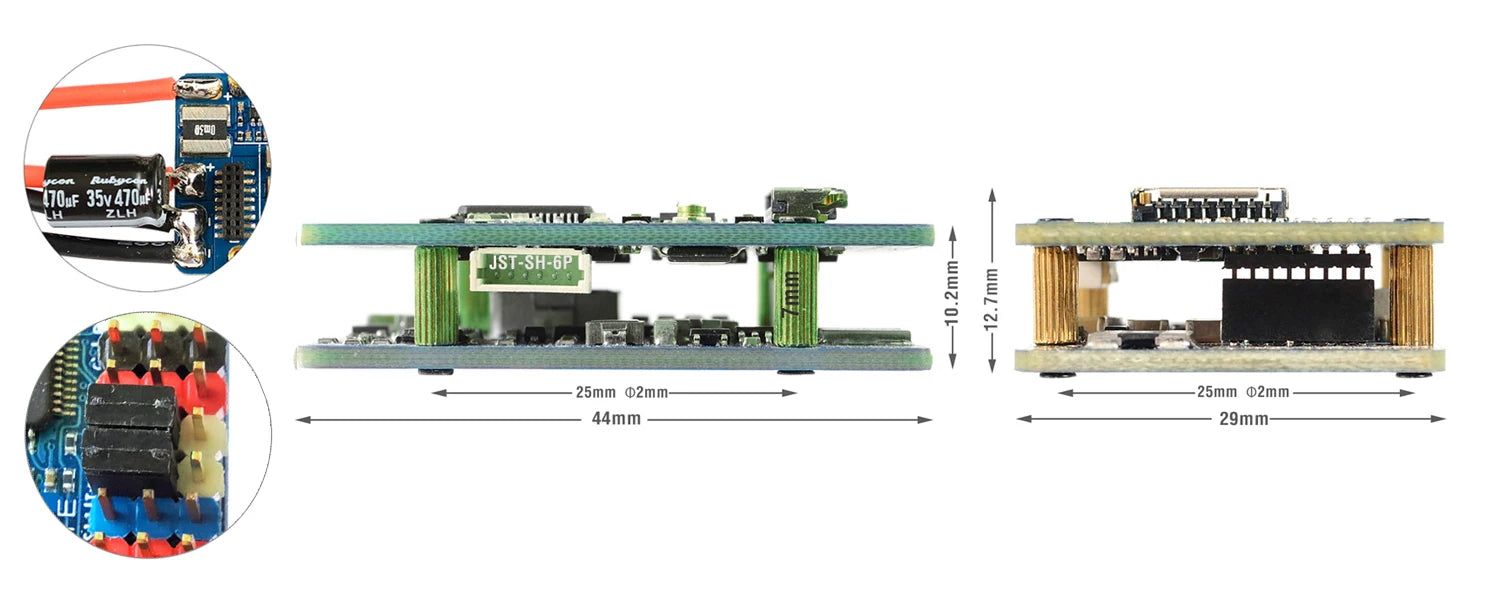
장착: 25 x 25mm, Φ2mm
-
크기: 44 x 29 x 12.7mm
-
무게: 22g(USB/버저 어댑터 포함)
포함
-
1x F405-WTE
-
1x USB(Type-C)/경고음(패시브 버저) 연장기 + 20cm JST-SH-6P - USB 연장기용 JST-SH-6P 케이블.
-
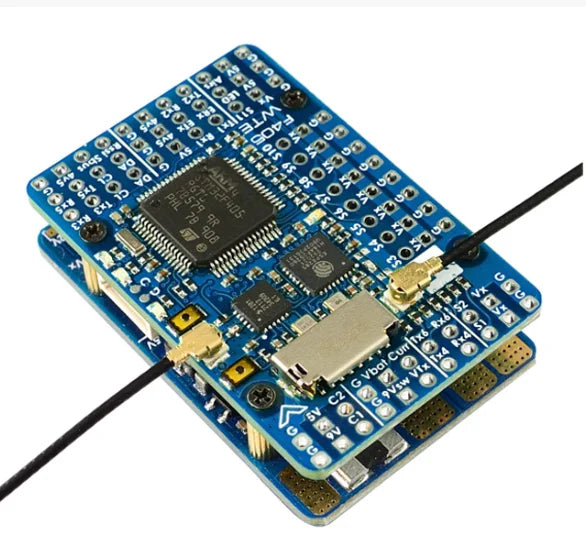
2x IPEX-MHF1 2.4G 안테나
-
1x Rubycon ZLH 35V 470uF 커패시터
-
Dupont 2.54핀 (보드는 납땜되지 않은 상태로 배송됩니다)
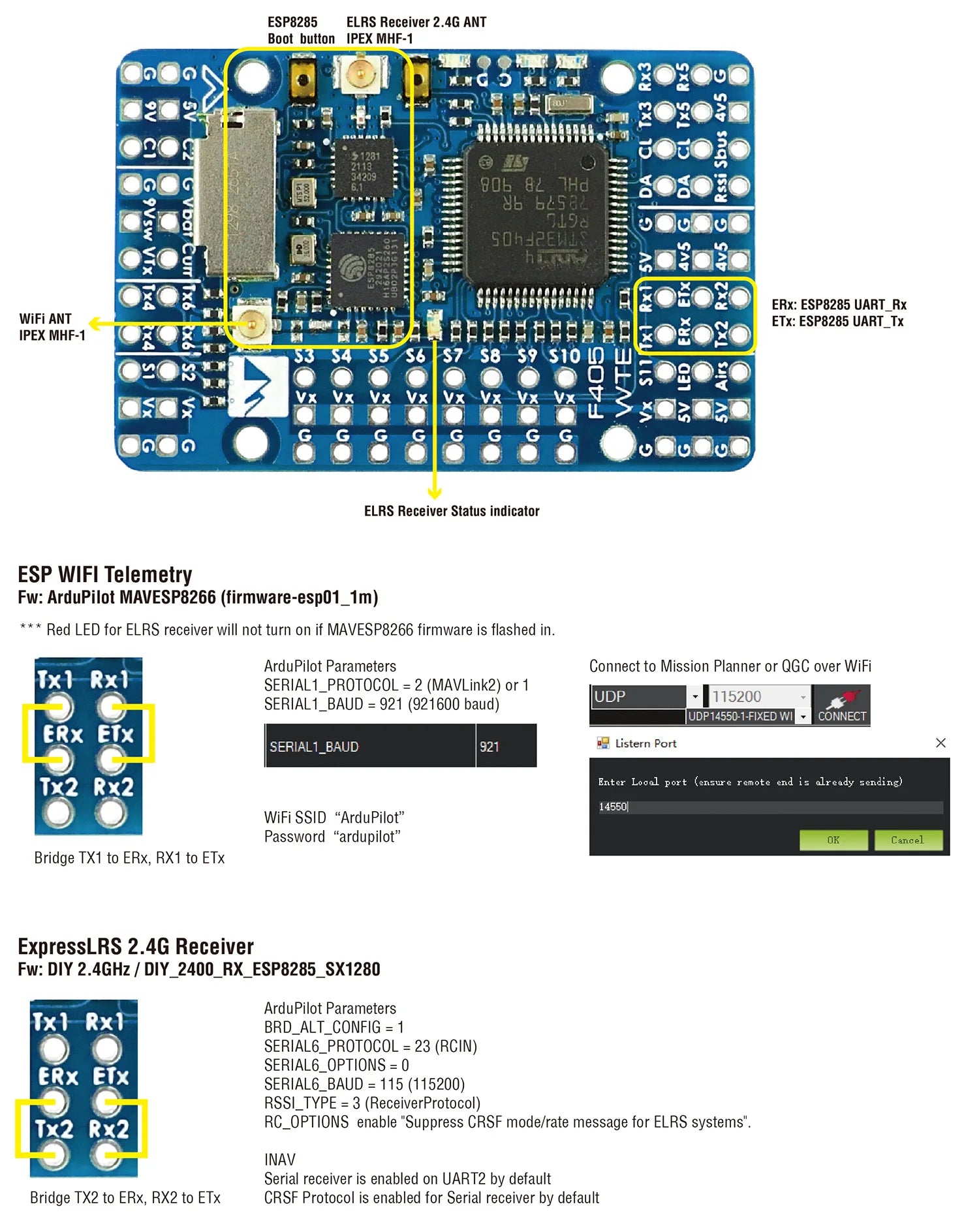
ArduPilot ESP8266 Wi-Fi 원격 측정
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
ESP_NodeMCU-PyFlasher로 플래싱
-
ESP8285(ETx, ERx)를 USB-TTL 어댑터에 연결합니다. F405-WTE의 ETx는 USB-TTL의 Rx에 연결되고 ERx는 USB-TTL의 Tx에 연결됩니다. F405-WTE의 4v5 및 GND를 USB-TTL의 5V 및 GND에 연결
-
ESP8285 부팅 버튼을 길게 누른 상태에서 USB-TTL 어댑터를 PC에 연결하세요.
-
ESP_NodeMCU-PyFlasher 열기
-
USB-TTL 모듈의 직렬 포트를 선택하고, 펌웨어를 로드하고, "이중 출력(DOUT)"을 선택하고 "예. 모든 데이터를 삭제합니다“
-
“Flash NodeMCU“
를 클릭하세요. -
깜빡인 후 전원을 끄고 USB나 배터리로 F405-WTE의 전원을 켜세요.
-
몇 초 정도 기다린 후 WiFi SSID를 'ArduPilot'으로 검색하고 비밀번호는 'ardupilot'입니다.
-
팁: MAVESP8266 펌웨어가 플래시되면 ELRS 수신기용 빨간색 LED가 켜지지 않습니다.
-
ExpressLRS 2.4G 수신기
-
ExpressLRS AUX1-AUX8은 전체 해상도 CH가 아닙니다. https://www.expresslrs.org/2.0/software/switch-config/
-
WiFi를 통해 깜박임
-
USB로 F405-WTE 전원을 켜면 수신기의 LED(빨간색)가 처음에는 느리게 깜박이고 30초 후에는 WiFi 핫스팟 모드임을 나타내기 위해 빠르게 깜박여야 합니다.
-
더 자세한 단계는 이 페이지를 참조하세요.
-
대상: DIY 2.4GHz / DIY_2400_RX_ESP8285_SX1280
-
-
UART를 통해 깜박임
-
ESP8285(ETx, ERx)를 USB-TTL 어댑터에 연결합니다. F405-WTE의 ETx는 USB-TTL의 Rx에 연결되고 ERx는 USB-TTL의 Tx에 연결됩니다. F405-WTE의 4v5 및 GND를 USB-TTL의 5V 및 GND에 연결합니다.
-
ESP8285 부팅 버튼을 길게 누른 상태에서 USB-TTL 어댑터를 PC에 연결하세요.
-
대상 선택 DIY 2.4GHz / DIY_2400_RX_ESP8285_SX1280
025> 및 “UART”에서 플래싱 방법으로 바인드 문구와 펌웨어 옵션을 설정하고 완료한 후 빌드 및 플래시를 클릭하세요.
-
WiFi를 통한 INAV 구성기와 UDP 연결
-
펌웨어: MSPWifiBridge_ESP-01.bin github.com/Scavanger/MSPWifiBridge를 기반으로 컴파일됨
-
ESP_NodeMCU-PyFlasher로 플래싱
-
ESP8285(ETx, ERx)를 USB-TTL 어댑터에 연결합니다. F405-WTE의 ETx는 USB-TTL의 Rx에 연결되고 ERx는 USB-TTL의 Tx에 연결됩니다. F405-WTE의 4v5 및 GND를 USB-TTL의 5V 및 GND에 연결
-
ESP8285 부팅 버튼을 길게 누른 상태에서 USB-TTL 어댑터를 PC에 연결하세요.
-
ESP_NodeMCU-PyFlasher 열기
-
USB-TTL 모듈의 직렬 포트를 선택하고 펌웨어를 로드한 다음 '이중 출력(DOUT)'을 선택하고 '예. 모든 데이터를 삭제합니다“
-
“Flash NodeMCU“
를 클릭하세요. -
깜빡인 후 전원을 끄고 USB나 배터리로 F405-WTE의 전원을 켜세요.
-
몇 초 정도 기다렸다가 Wi-Fi SSID를 검색하여 'MSPWifiBridge', 비밀번호는 '123456789'
-
구성 페이지로 자동 전달되지 않는 경우 수동으로 http://192.168.4.1로 이동하세요. 표준 로그인 데이터: 사용자 이름:admin, 비밀번호:123456789
35>
-
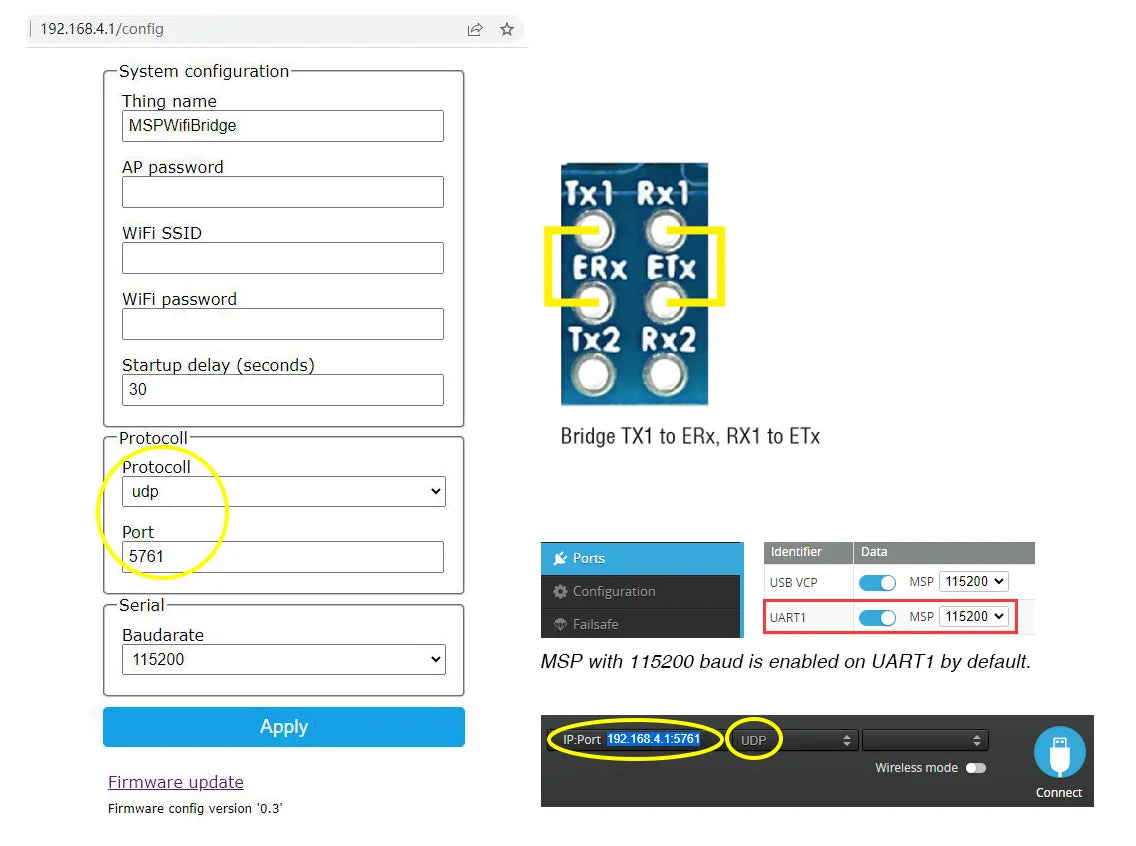
192.168.4.1/config 시스템 구성 Thing_name MSPWifiBridge AP 비밀번호 Ixl Rx| WiFi SSID ERx ETx WiFi 비밀번호 Tx2 Rx2 Staz 지연(초 30 프로토콜 브리지 TX1 - erx, RXI - ETx 프로토콜 udp 포트 5761 폰트 식별자 데이터 USB VC?
Related Collections