Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - Compass QMC5883L 모듈 포함 FPV 레이싱 드론용 디지털 AirSpeed 4~9V
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - Compass QMC5883L 모듈 포함 FPV 레이싱 드론용 디지털 AirSpeed 4~9V
MATEKSYS
정가
$79.00 USD
정가
할인가
$79.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS 사양
휠베이스: 하단 플레이트
용도: 차량 및 원격 조종 장난감
부품/액세서리 업그레이드: GPS
도구 용품: 조립 카테고리
기술적 매개변수: KV1100
크기: 표시
원격 제어 주변기기/장치: 원격 컨트롤러
권장 연령: 12+y
RC 부품 및 액세서리: M10Q-5883
수량: 1개
원산지: 중국 본토
모델 번호: Matek GNSS M10Q-5883
재료: 복합 재료
사륜구동 속성: 조립
차량 유형: 비행기
M10Q-5883은 u-blox SAM-M10Q-00B로 구동되는 다중 별자리 GNSS 모듈을 사용합니다.
SAM-M10Q는 u-blox M10 표준 정밀 GNSS 플랫폼을 특징으로 하며 탁월한 감도를 제공합니다. 모든 L1 GNSS 신호에 대한 획득 시간. SAM-M10Q는 4개의 GNSS(GPS, GLONASS, Galileo, BeiDou) 동시 수신을 지원합니다. 가시 위성 수가 많으면 수신기가 최상의 신호를 선택할 수 있습니다. 이는 특히 깊은 도시 협곡과 같은 까다로운 조건에서 위치 가용성을 극대화합니다. u-blox Super-S(Super-Signal) 기술은 뛰어난 RF 감도를 제공하고 비가시선 시나리오에서 동적 위치 정확도를 향상시킬 수 있습니다.
고이득 15 x 15 mm2 패치 안테나는 최고의 균형을 제공합니다. 성능과 작은 크기 사이. 무지향성 안테나 방사 패턴은 장치 설치의 유연성을 높여줍니다.
SAM-M10Q에 대한 자세한 내용은 u-blox SAM-M10Q 페이지를 확인하세요.
사양
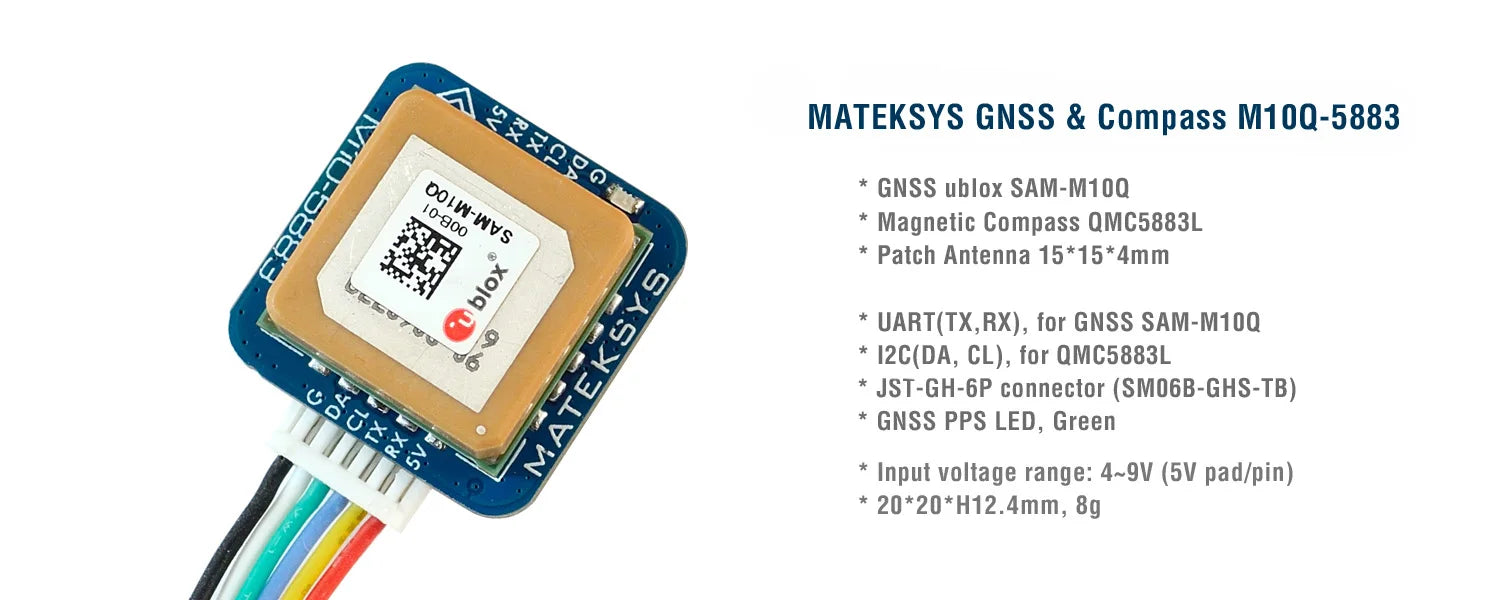
GNSS u-blox SAM-M10Q- 00B (GPS, GLONASS, Galileo 및 BeiDou)
자기 나침반 QMC5883L
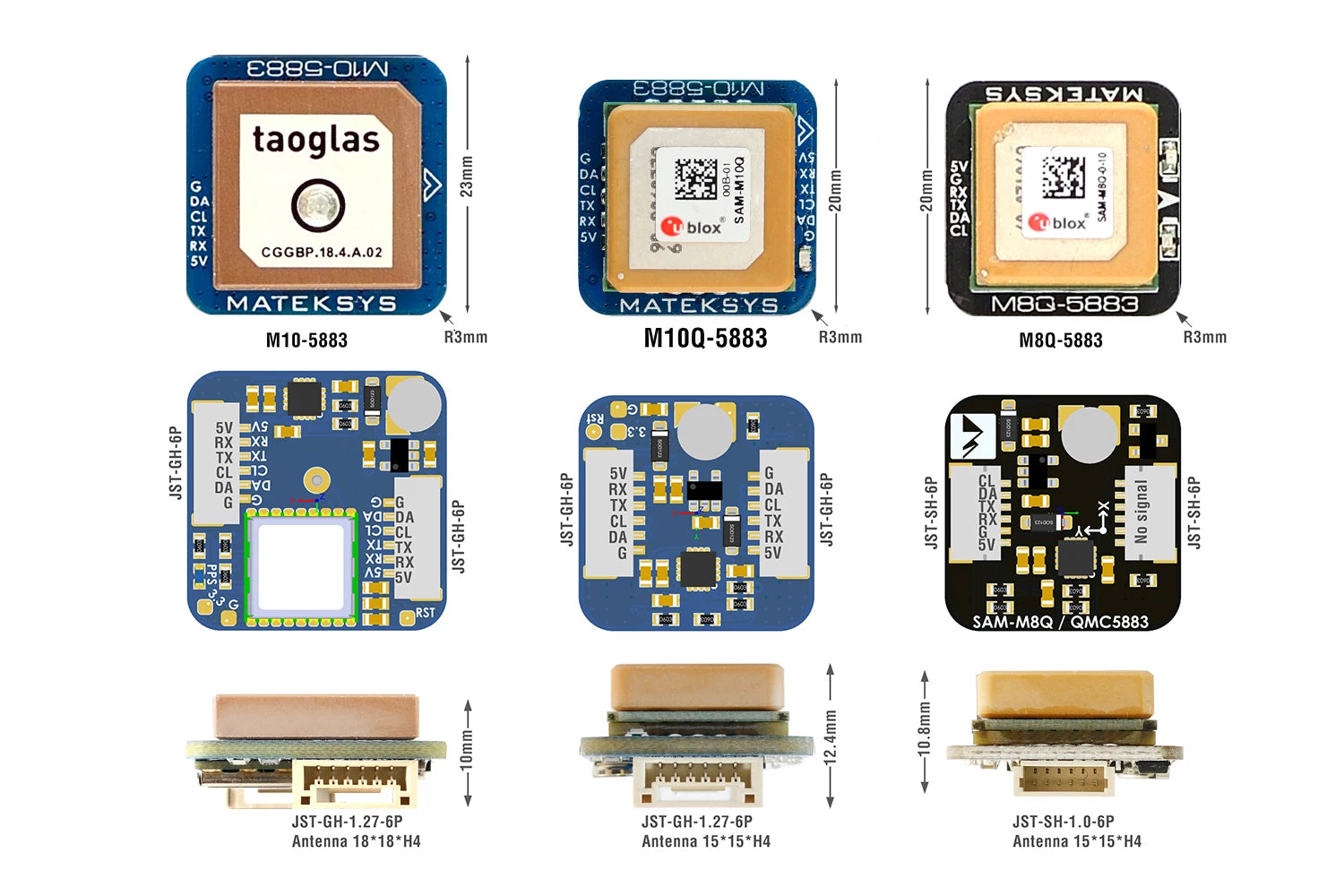
패치 안테나 15*15*4mm
입력 전압 범위: 4~9V(5V 패드/핀)
소비 전력: 13mA
UART 전송 속도: 기본값 9600
작동 온도: -20~80°C
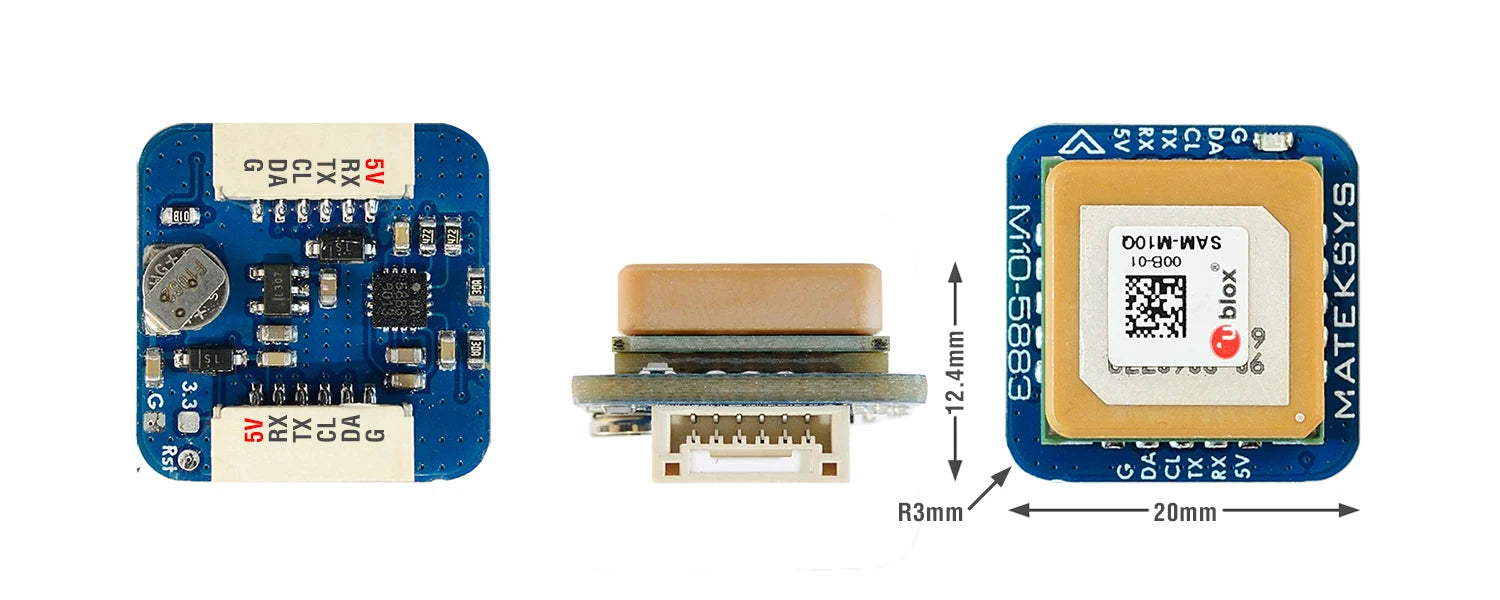
GNSS SAM-M10Q-00B용 UART(TX, RX) 인터페이스
Compass QMC5883L용 I2C(DA, CL) 인터페이스
JST-GH-6P 커넥터(SM06B-GHS-TB). 1.27mm 피치
GNSS PPS LED, 녹색. (전원을 켠 후 계속 켜져 있음, GNSS가 3D 수정을 받으면 깜박임(1Hz))
프로토콜: UBX(u-blox) 5Hz@GPS+GAL+BDS B1C+GLO 또는 NMEA 1Hz
20mm*20mm*12.4mm
8g
M10Q-5883_step.zip
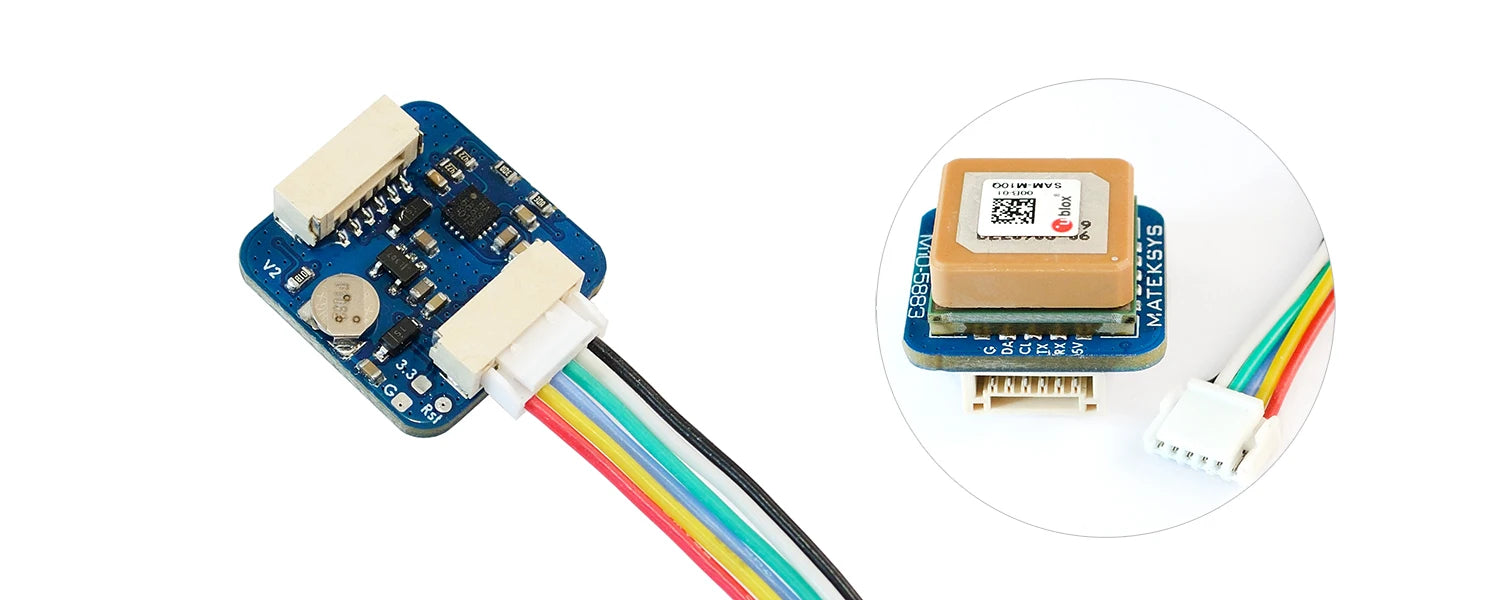
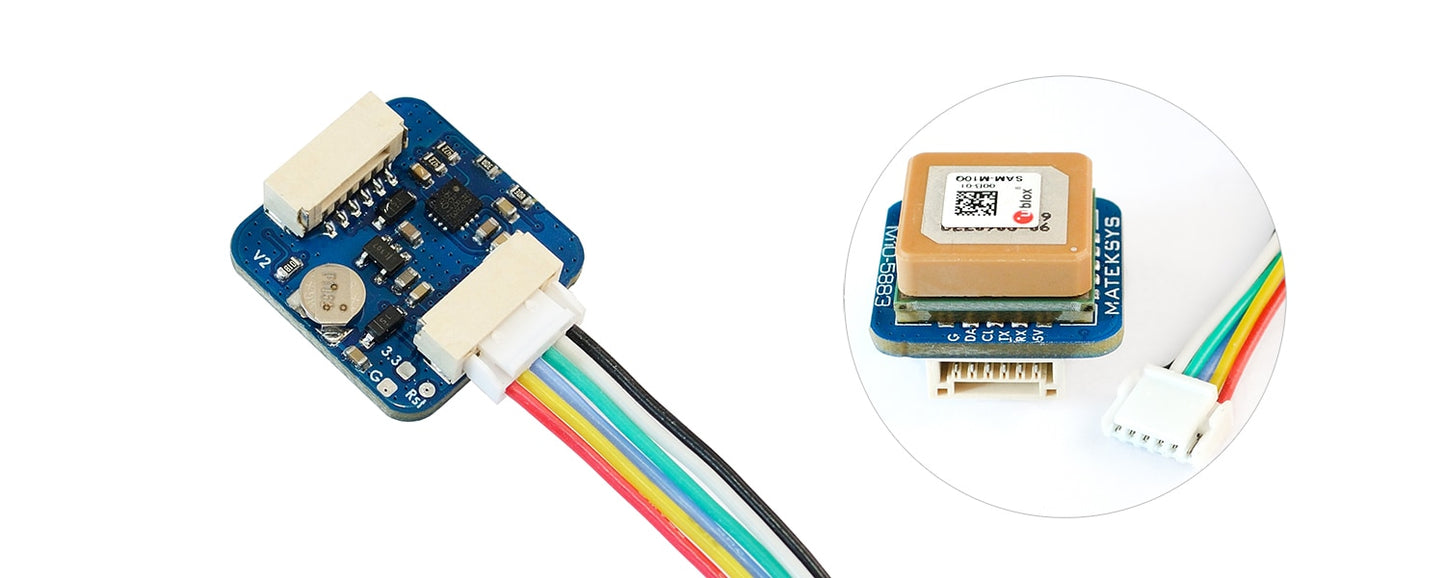
포함
1x M10Q-5883
1x JST-GH-6P ~ JST-GH-6P 20cm 실리콘 와이어
배선 및 설정
M10Q-5883 5V에서 비행 컨트롤러 4~9V
M10Q-5883 RX에서 비행 컨트롤러 UART_TX
M10Q-5883 TX에서 비행 컨트롤러 UART_RX
M10Q-5883 CL에서 비행 컨트롤러 I2C_SCL
M10Q- 5883 DA에서 비행 컨트롤러 I2C_SDA
M10Q-5883 G 비행 컨트롤러 GND
팁 및 참고 사항
나침반 정렬(평면 장착): 자력계를 기울이는 것은 강력히 권장되지 않습니다!
INAV/BetaFLight: 나침반 화살표 앞으로, 비행 컨트롤러 화살표가 앞쪽을 향할 때 CW 270° 뒤집기 설정.
INAV/BetaFLight: 나침반 화살표 뒤로, 비행 컨트롤러 화살표가 앞쪽을 향할 때 CW 90° 뒤집기 설정.
Ardupilot/Mission Planner: 회전 없음.
전선/ESC/모터/철 기반 물질로부터 10cm 떨어진 곳에 나침반/자력계가 있는지 확인하세요
------–
INAV 5.0.0, Betaflight 4.3.0 , ArduPilot 4.3 이상이 필요합니다.
UBlox NEO-M9N, MAX-M10S, SAM-M10Q 시리즈에는 모두 데이터 플래시가 내장되어 있지 않습니다.GNSS의 전원이 꺼지고 슈퍼커패시터가 소진되면. 설정이 기본값으로 돌아갑니다.
UBX 프로토콜은 양방향입니다. 비행 컨트롤러 펌웨어는 UBX 프로토콜을 통해 GPS 설정을 변경할 수 있습니다. u-center에서 GNSS 모듈 매개변수를 설정할 필요가 없습니다.
ublox FW 5.1이 포함된 SAM-M10Q의 기본 구성은 QZSS 및 SBAS가 활성화된 GPS, Galileo, GLONASS 및 BeiDou B1C의 동시 수신입니다.
u-blox GNSS FW3.01로 시작하면 타임펄스가 UTC 시간과 정렬되고 해당 시간은 윤초가 다운로드된 후에만 유효하게 설정됩니다. 최대 12.5분이 소요될 수 있습니다. 아마도 GPS가 3D로 고정된 후 PPS LED가 즉시 깜박이지 않을 것입니다.
M10Q-5883은 수신기를 재설정하는 기능을 제공합니다. 최소 100ms 동안 "RST" 패드를 접지에 연결하면 콜드 스타트가 트리거됩니다. RESET은 모든 정보를 삭제하고 콜드 스타트를 시작합니다. 복구 옵션으로만 사용해야 합니다. 배선과 설정이 제대로 된 것이 확실하다면. 그러나 비행 컨트롤러가 GNSS 모듈(회색 GPS 아이콘)을 감지할 수 없습니다. 재설정을 시도해 보십시오.
세라믹 안테나의 긁힌 부분은 안테나 튜닝의 결과입니다.
GPS 관련 문제 해결: http://www.mateksys.com/?p=5712#tab-id-6
u-center Windows
*** M10Q-5883 PCB의 첫 번째 배치에 있는 SKU 실크 인쇄는 "M10-5883"입니다.
Matek Systems GNSS 모듈(M10Q-5883) ) 및 자기 나침반과 패치 안테나를 갖춘 나침반 모듈(QMC5883L)은 15mm x 15mm x 4mm의 컴팩트한 크기와 전송 및 수신(TX/RX)을 위한 UART 인터페이스를 갖추고 있습니다.