


MATEKSYS H7A3-SLIM 비행 컨트롤러 - ICM42688P - 30x30
MATEKSYS H7A3-SLIM 비행 컨트롤러 - ICM42688P - 30x30
MATEKSYS
픽업 사용 가능 여부를 로드할 수 없습니다.
MATEKSYS H7A3-SLIM 비행 컨트롤러는 30x30mm의 컴팩트한 디자인에서 높은 성능을 제공합니다. STM32H7A3RIT6 MCU, 280MHz Cortex-M7 프로세서, 1.4MB RAM, 2MB 플래시를 특징으로 합니다. ICM42688P IMU, SPL06-001 기압계, AT7456E OSD, 128MB 플래시 블랙박스를 통해 정확한 데이터와 충분한 로깅을 제공합니다. 이 컨트롤러는 6개의 UART, 11개의 PWM 출력, 1개의 I2C, 1개의 CAN 포트, 4개의 ADC 채널을 포함합니다. 또한 세 개의 상태 LED, USB Type-C 포트, 스위치 가능한 9V 출력을 갖추고 있습니다. 30.5 x 30.5mm 장착 패턴, 4mm 구멍, 3mm 고무 패킹을 가지고 있으며, 무게는 단 7g으로 FPV 레이싱 및 프리스타일 비행에 적합합니다. 맞춤 통합을 위한 3D 스텝 파일이 포함되어 있습니다.
특징
- 화면 표시
- 30x30 장착
- 컴팩트 디자인
- 연결성
- 경량
사양
사양
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- 바로: SPL06-001
- OSD: AT7456E
- 블랙박스: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) 내장 반전 기능 포함.
- 11x PWM 출력
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, 전류, VB2, Cur2)
- FC 상태를 위한 3x LED (파랑, 빨강) 및 3.3V 표시기(빨강)
- USB Type-C(USB2.0)
- 2x 4in1 ESC를 위한 2x JST-SH1.0_8핀 커넥터에 8x PWM 출력
- 1x JST-GH1.25_4핀 커넥터 (5V/CAN-H/CAN-L/G)
- 9V 출력 ON/OFF 스위치 가능
- 디지털 비디오 OSD는 여분의 UART로 지원됩니다
전원
- Vbat 입력: 6~36V (2~8S LiPo)
- BEC: 5V 2A 지속 (최대 3A)
- BEC: 9V 2A 지속 (최대 3A)
- LDO 3.3V: 최대 200mA
- 내장된 전류 센서 없음
- ADC VB2 패드 최대 69V 지원 (전압 분배기: 1K:20K)
FC 펌웨어
- ArduPilot: MATEKH7A3 (4.6 이상
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- STM32CubeProgrammer로 플래싱
물리적
- 장착: 30.5 x 30.5mm, Φ4mm 고무링 포함 Φ3mm
- 치수: 36 x 36 x 5 mm
- 무게: 7g
- 3D 스텝 H7A3-SLIM_step.zip
포함
- 1x H7A3-SLIM
- 6x 실리콘 고무링 M4에서 M3
- 2x JST-SH1.0_8핀 케이블, 5cm, & 8핀 커넥터
- 1x JST-GH-4P to JST-GH-4P 케이블 for CAN 포트, 20cm
상세정보

MATEKSYS H7A3-SLIM 비행 컨트롤러는 STM32H7A3 MCU와 ICM42688P IMU 및 30.5mm 장착 패턴의 USB-C 포트를 사용합니다.

MATEKSYS H7A3-SLIM 비행 컨트롤러는 USB-C 포트와 깔끔한 배선을 위한 명확하게 표시된 패드를 갖춘 컴팩트한 30x30 레이아웃을 사용합니다.

MATEKSYS H7A3-SLIM은 깔끔한 배선과 쉬운 설정을 위해 듀얼 JST-SH 1.0 8핀 커넥터와 JST-GH 4핀 포트 및 USB Type-C를 사용합니다.

MATEKSYS H7A3-SLIM은 카메라/VTx 비디오, UART, CAN 및 전원 연결을 위한 명확하게 표시된 솔더 패드와 포트를 사용합니다.
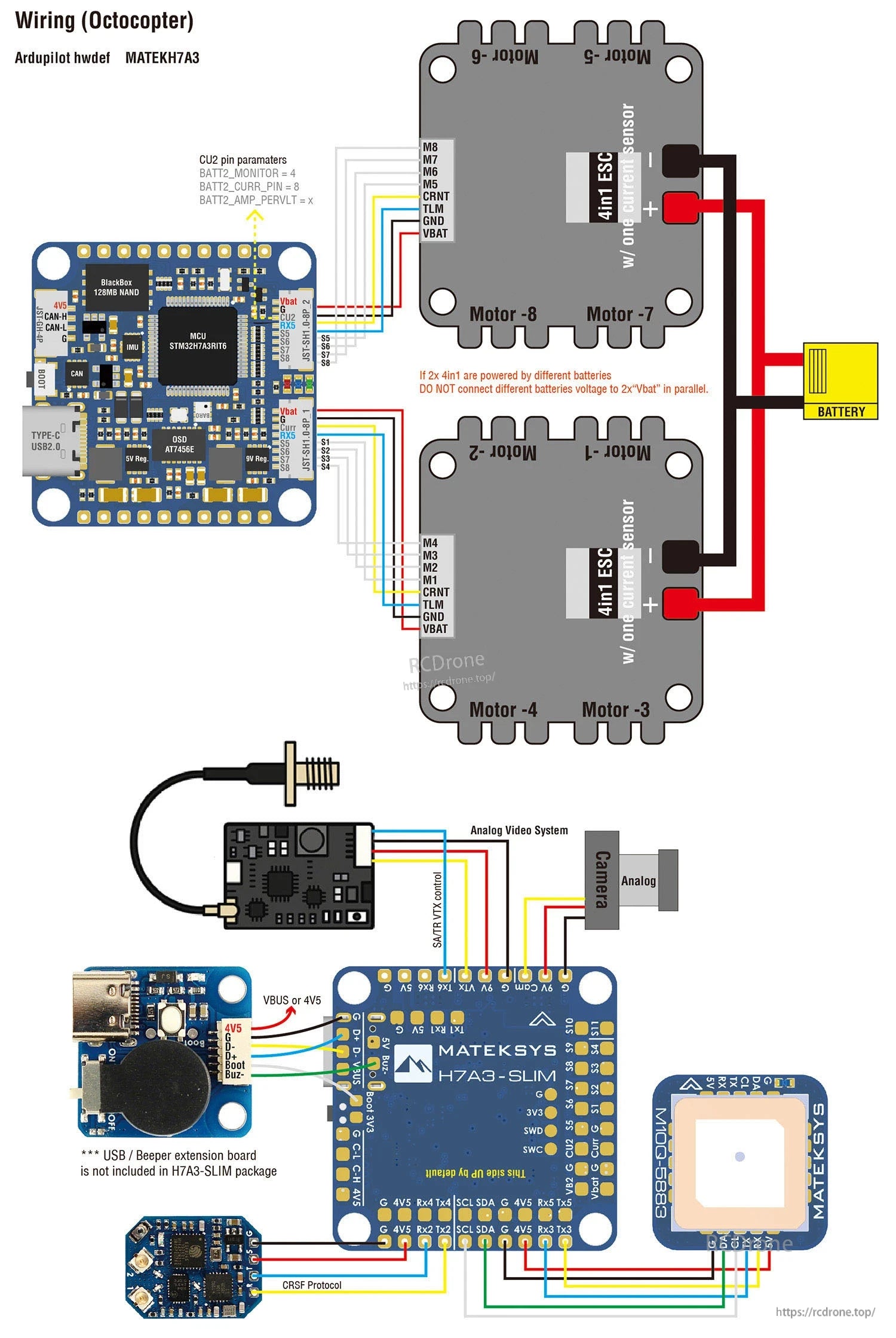
MATEKSYS H7A3-SLIM은 듀얼 4-in-1 ESC, VBAT 전원, GPS, 수신기 및 아날로그 비디오 구성 요소를 연결하기 위한 명확하게 표시된 패드를 사용합니다.

ArduPilot 매핑
| ArduPilot | ||||||||
| PWM | S1 | PWM1 GPIO50 | 5 V 내성 I/O | TIM1_CH2 | DMA/Bi-DShot | Group1 | ||
| S2 | PWM2 GPIO51 | 5 V 내성 I/O | TIM1_CH3 | DMA/Bi-DShot | ||||
| S3 | PWM3 GPIO52 | 5 V 내성 I/O | TIM2_CH1 | DMA/Bi-DShot | Group2 | |||
| S4 | PWM4 GPIO53 | 5 V 내성 I/O | TIM2_CH2 | DMA/Bi-DShot | ||||
| S5 | PWM5 GPIO54 | 5 V 내성 I/O | TIM3_CH3 | DMA/Bi-DShot | Gourp3 | |||
| S6 | PWM6 GPIO55 | 5 V 내성 I/O | TIM3_CH4 | DMA/Bi-DShot | ||||
| S7 | PWM7 GPIO56 | 5 V 내성 I/O | TIM3_CH1 | DMA/Bi-DShot | ||||
| S8 | PWM8 GPIO57 | 5 V 내성 I/O | TIM3_CH2 | DMA/Bi-DShot | ||||
| S9 | PWM9 GPIO58 | 5 V 내성 I/O | TIM4_CH1 | DMA/DShot | Group4 | |||
| S10 | PWM10 GPIO59 | 5 V 내성 I/O | TIM4_CH2 | DMA/DShot | ||||
| S11 | PWM11 GPIO60 | 5V 허용 I/O | TIM16_CH1 | DMA/DShot | Group5 | |||
| PWM1~PWM11은 Dshot 및 PWM 기능을 지원합니다.그러나 Dshot과 일반 PWM 출력을 혼합하는 것은 그룹으로 제한됩니다. 즉, 그룹 내에서 출력을 Dshot으로 활성화하려면 해당 그룹의 모든 출력을 PWM 출력이 아닌 Dshot으로 구성하고 사용해야 합니다. 서보와 모터가 같은 그룹에 혼합된 경우, 이 그룹이 서보 사양에 따라 가장 낮은 PWM 주파수로 실행되도록 해야 합니다. 즉, 서보가 최대 50Hz를 지원하는 경우, ESC는 이 그룹에서 50Hz로 실행되어야 합니다. PINIO 9V 스위치 GPIO81 RELAY1_PIN 81 ADC Vbat 패드 BATT_VOLTAGE_SENS 6~36V BATT_VOLT_PIN BATT_VOLT_MULT 10 21.0 전류 패드 BATT_CURRENT_SENS 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||||||
| VB2 패드 | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||||
| CU2 패드 | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||||
| I2C | SCL/SDA | I2C3 | 5V 내성 I/O | 온보드 바로 SPL06-001 | 주소 | 0x76 | ||
| 디지털 공기 속도 I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||||
| 자기계 | COMPASS_AUTODEC | 1 | ||||||
| CAN | C-H/C-L | CAN2 | 5V 내성 I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
GPS 나침반 공기 속도 센서 |
GPS_유형 나침반_유형마스크 공기속도_유형 |
9 0 8 |
| UART | USB | USB | 콘솔 | SERIAL0_프로토콜 | 2 | |||
| TX1 RX1 | USART1 w/DMA | 5 V 내성 I/O | 텔레메트리 | SERIAL1_프로토콜 | 2 | |||
| TX2 RX2 | USART2 w/DMA | 5 V 내성 I/O | RC 입력/수신기 | SERIAL2_프로토콜 | 23 | |||
| TX3 RX3 | USART3 w/DMA | 5 V 내성 I/O | GPS | SERIAL3_PROTOCOL | 5 | |||
| TX4 RX4 | UART4 DMA 없이 | 5 V 내성 I/O | 예비 | SERIAL4_PROTOCOL | -1 | |||
| TX5 RX5 | UART5 DMA 없이 | 5 V 내성 I/O | 예비 | SERIAL5_PROTOCOL | -1 | |||
| TX6 RX6 | USART6 DMA 없이 | 5 V 내성 I/O | 예비 | SERIAL6_PROTOCOL | -1 | |||
RC 입력
RC 입력은 USART2(SERIAL2)에서 구성됩니다.모든 직렬 RC 프로토콜을 지원합니다. 기본값은 SERIAL2_PROTOCOL=23입니다.
- PPM은 지원되지 않습니다.
- CRSF는 Tx2 & Rx2 연결이 필요하며, SERIAL2_OPTIONS를 "0" (기본값)으로 설정합니다.
- SBUS/DSM/SRXL은 Rx2 핀에 연결되지만, SBUS는 SERIAL2_OPTIONS를 "3"으로 설정해야 합니다.
- FPort는 Tx2에 연결이 필요하며, SERIAL2_OPTIONS를 "7"로 설정합니다. 텔레메트리가 작동하지 않으면 SERIAL7_OPTIONS = 135로 설정해 보십시오.
- SRXL2는 Tx2에 연결이 필요하며, 자동으로 텔레메트리를 제공합니다. SERIAL2_OPTIONS를 "4"로 설정합니다.
- 모든 UART는 ArduPilot에서 RC 시스템 연결에 사용할 수 있으며, PPM을 제외한 모든 프로토콜과 호환됩니다. 자세한 내용은 무선 제어 시스템 을 참조하십시오.
ArduPilot 릴레이(PINIO)
- 기본적으로 9V 출력 켜짐
- PC13 PINIO1 출력 GPIO(81) //9V 전원 switche.g.
- RELAY1_FUNCTION 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_OPTION 28 //릴레이 켜기/끄기, 송신기의 CH7을 사용하여 9V 켜기/끄기 설정
구성된 기능은 보조 스위치의 pwm 값이 1800을 초과할 때 트리거됩니다. 값이 1200 이하로 떨어지면 비활성화됩니다.
스위치가 높고 낮을 때 송신기로부터 전송된 pwm 값을 Mission Planner의 초기 설정 >> 필수 하드웨어 >> 라디오 보정 화면에서 확인하십시오.1800보다 높거나 1200보다 낮지 않으면 송신기에서 서보 끝점을 조정하는 것이 가장 좋습니다.
Related Collections


