MKS X5 HBL550 브러시리스 메탈 기어 고토크 디지털 서보 모터 (고전압)
MKS X5 HBL550 브러시리스 메탈 기어 고토크 디지털 서보 모터 (고전압)
MKS Servos
정가
$188.00 USD
정가
할인가
$188.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
MKS Servos X5 HBL550 브러시리스 메탈 기어 고토크 디지털 서보(고전압)는 정밀한 제어와 강력한 출력을 요구하는 라디오 제어 응용 프로그램을 위해 설계된 고성능 서보 모터입니다. 이 디지털 서보는 브러시리스 모터, 금속 합금 기어 및 이중 볼 베어링을 결합하여 높은 토크, 빠른 반응 및 넓은 고전압 범위에서 신뢰할 수 있는 작동을 제공합니다.
기술 지원 또는 제품 문의는 고객 서비스에 연락하시기 바랍니다 [email protected] 또는 https://rcdrone.top/를 방문하십시오.
주요 특징
- 6.0V에서 8.4V DC까지 넓은 작동 범위를 가진 고전압 디지털 서보 모터
- 최대 38 kg-cm / 527.7 oz-in (8.2V)의 높은 정지 토크
- 부하가 없는 빠른 전이 속도 0.085 s (8.2V)
- 고효율 및 긴 서비스 수명을 위한 브러시리스 모터
- 고하중에서 내구성을 위한 금속 합금 기어 트레인
- 부드러운 출력 샤프트 지지를 위한 2x 볼 베어링
- 정밀한 위치 지정을 위한 매우 미세한 0.001 ms 기본 데드 밴드
사양
| 제품 유형 | 서보 모터 | |
| 모델 | MKS 서보 X5 HBL550 | |
| 모터 유형 | 브러시리스 모터 | |
| 기어 재질 | 금속 합금 기어 | |
| 베어링 | 2x 볼 베어링 | |
| 작동 전압 | 6.0V ~ 8.2V) | 12A |
| Operating temperature |
12A | |
| 무게 | 79.5 g (2.80 oz) | |
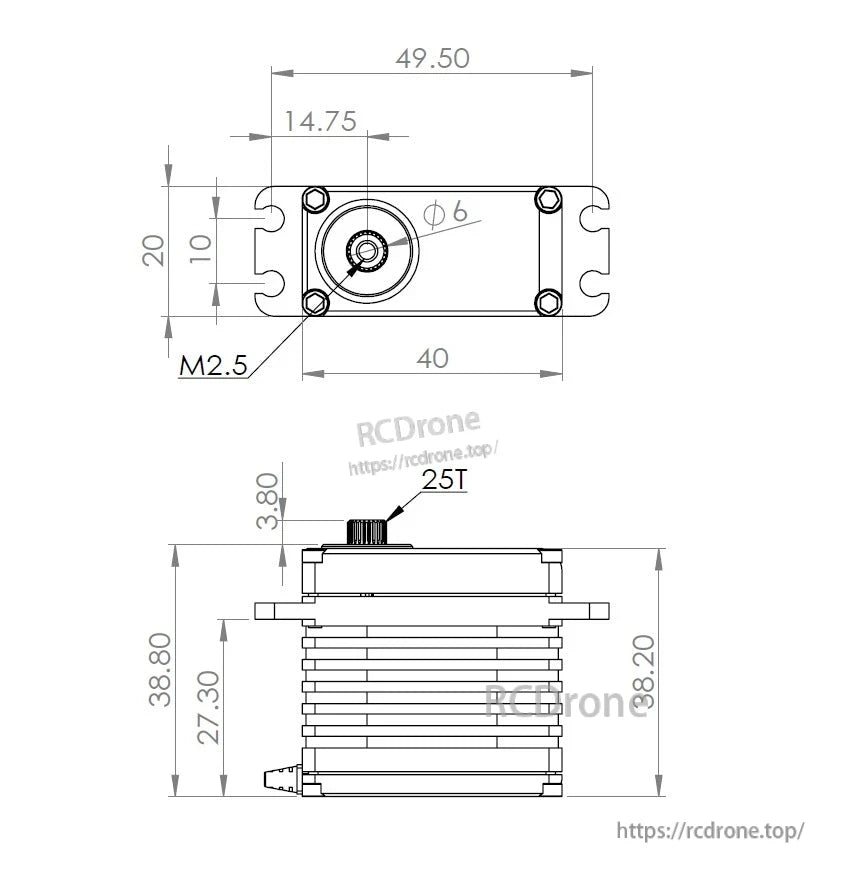
| 치수 | 40 x 20 x 38.8 mm |
응용 분야
이 MKS X5 HBL550 고토크 디지털 서보 모터는 강력한 토크, 빠른 응답 및 정확한 위치 지정을 요구하는 고성능 RC 모델 및 기타 정밀 모션 제어 시스템에서 사용하기에 적합합니다.