

MUWEIDU L4030 모터 브러시리스 DC 서보 모터 16V 160rpm 0.25N.m RS485/CAN 15/18비트 엔코더
MUWEIDU L4030 모터 브러시리스 DC 서보 모터 16V 160rpm 0.25N.m RS485/CAN 15/18비트 엔코더
MUWEIDU
정가
$187.00 USD
정가
할인가
$187.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
MUWEIDU L4030 모터는 저속, 고정밀 브러시리스 DC 서보 모터 로, 속도/위치 제어를 위한 통합 전기 구동 기능을 갖추고 있습니다. RS485 또는 CAN 통신을 지원하며, 안정적이고 부드러운 작동이 필요한 컴팩트하고 공간 제약이 있는 모션 애플리케이션을 위해 설계되었습니다.
주요 특징
- 시리즈 포지셔닝: “저속 & 고정밀 브러시리스 DC 모터 시리즈”
- 미니 서보 모터; 중공 샤프트 디자인
- 안정적 & 부드러운 작동
- CE 인증
- 통합 고정밀
- 경량 구조; 높은 토크 성능
- 저속 및 고정밀 위치 제어 요구 사항 충족
- 고성능 32비트 MCU가 MS 시리즈를 MF 시리즈의 모든 제어 명령과 완벽하게 호환되도록 함
- 프리미엄 실리콘 강판 및 고온 저항 고성능 영구 자석이 핵심 모터 재료로 채택됨
- 외부 로터 다단 평탄화 디자인이 공간 제약이 있는 응용 분야에 더 높은 토크를 제공함
- 부드러운 회전과 긴 서비스 수명을 위한 고성능 베어링을 갖춘 브러시리스 구조
- 고정밀, 저온 드리프트 합금 저항기로 정확한 전류 샘플링 및 제어
- 낮은 내부 저항과 높은 전류 출력을 가진 전체 N채널 3상 전체 브리지 드라이브
- 토크 개방 루프, 속도 및 위치 제어 모드 간의 원활한 전환 지원
- 일회성 보정; “제로 위치는 결코 잃지 않음”
기술 사양
| 모델 | L4030 |
| 정격 전압 | 16V |
| 정격 전류 | 1.1A |
| 최대 출력 | 5.5W |
| 정격 토크 | 0.25N.m |
| 최대 토크 | 0.35N.m |
| 정격 속도 | 160rpm |
| 인코더 | 15비트 또는 18비트 |
| 로터 관성 | 105gcm^2 |
| 모터 온도 모니터링 | 예 |
| 제어 모드 | 속도/위치 |
| 통신 프로토콜 | RS485 또는 CAN |
| 전체 치수 | Φ39.6mm x 33mm |
| 무게 | 112g |
인터페이스 정의
- ID 스위치
- CAN/RS485
| 인터페이스 | 노트 |
|---|---|
| B/L | RS485-B 또는 CAN-L |
| A/H | RS485-A 또는 CAN-H |
| V- | 부정 전원 공급 |
| V- | 부정 전원 공급 |
| V+ | 정전원 공급 |
| V+ | 정전원 공급 |
| T | UART 송신기 |
| R | UART 수신기 |
| G | 신호 GND |
응용 시나리오
- 휴머노이드 로봇
- 로봇 팔
- 엑소스켈레톤
- 사족 로봇
- AGV 차량
- ARU 로봇
- 360도 카메라
- 핸드헬드 카메라
- LiDAR
- 짐벌
PC 소프트웨어 / 제어 기능 (명시된 대로)
- PC 기반 매개변수 조정 / 테스트 / 펌웨어 업그레이드 가능
- PC, MCU, PLC, 산업용 컴퓨터 및 Raspberry Pi를 포함한 오픈 소스 개발 플랫폼과 호환 가능
- 다양한 제어 모드: 토크 모드; 속도 모드; 다회전 제어 모드; 단일 회전 위치 + 방향 모드; 증분 위치 모드
- 다회전 제어 모드; 단일 회전 위치 + 방향 모드; 증분 위치 모드에 대한 속도 제한 옵션 포함
- 다층 보호 메커니즘
- 브레이크 기능 예약 (브레이크 / 브레이크 해제)
문서
기술 지원, 통합 질문 또는 문서 도움을 원하시면 [email protected] or에 문의하시거나 https://rcdrone.top/. 를 방문하십시오.
세부정보

좁은 공간에서 저속, 고정밀 동작을 위해 설계된 컴팩트 미니 서보 모터 플랫폼입니다.

통합 드라이브 전자 장치는 효율적인 모터 재료와 설계를 통해 안정적인 저속, 고정밀 위치 제어를 지원합니다.
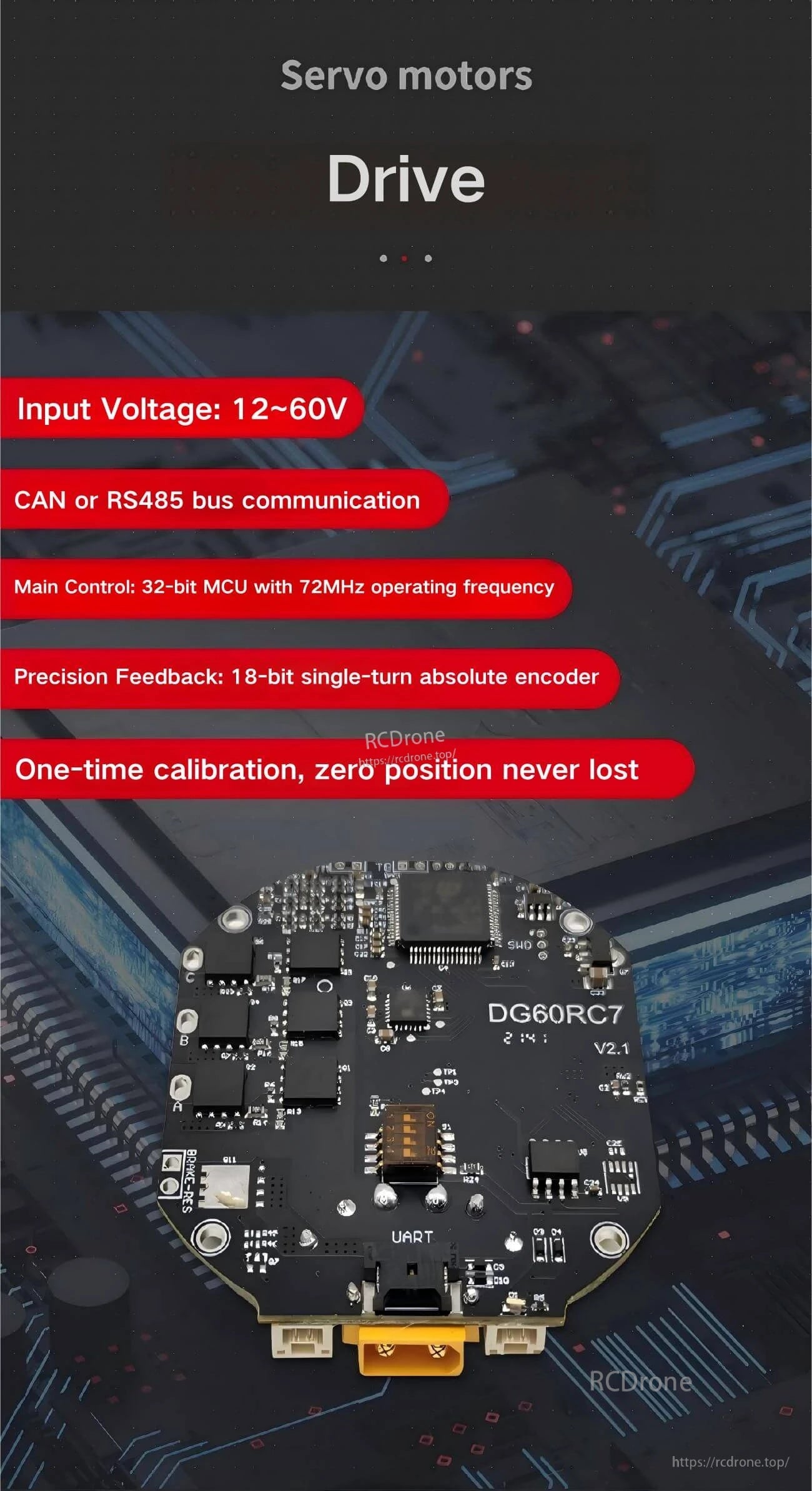
반응성이 뛰어난 속도 및 위치 제어를 위해 CAN 또는 RS485 통신 및 절대 인코더 피드백을 선택하세요.

명확한 인터페이스 라벨링은 전원, CAN/RS485 라인 및 UART 신호 연결을 위한 배선을 간소화합니다.
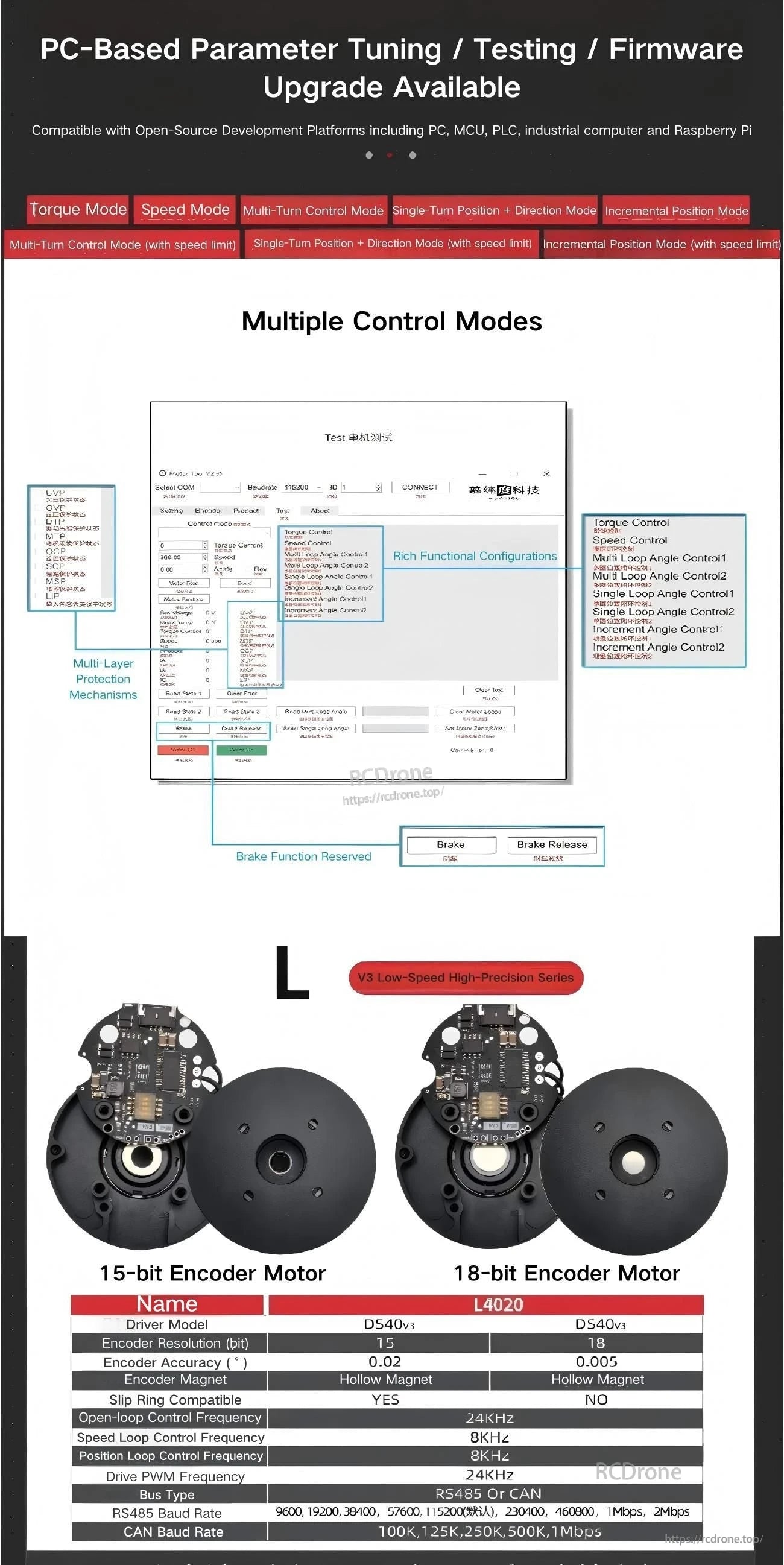
PC 도구를 사용하면 여러 제어 모드 및 인코더 구성에서 매개변수 조정, 테스트 및 펌웨어 업그레이드가 가능합니다.

Related Collections

