






MyActuator RH-32 중공 하모닉 로봇 조인트 모듈, 48V, 229Nm 피크 토크, 듀얼 17비트 인코더, CAN BUS & EtherCAT 제어
MyActuator RH-32 중공 하모닉 로봇 조인트 모듈, 48V, 229Nm 피크 토크, 듀얼 17비트 인코더, CAN BUS & EtherCAT 제어
MyActuator
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
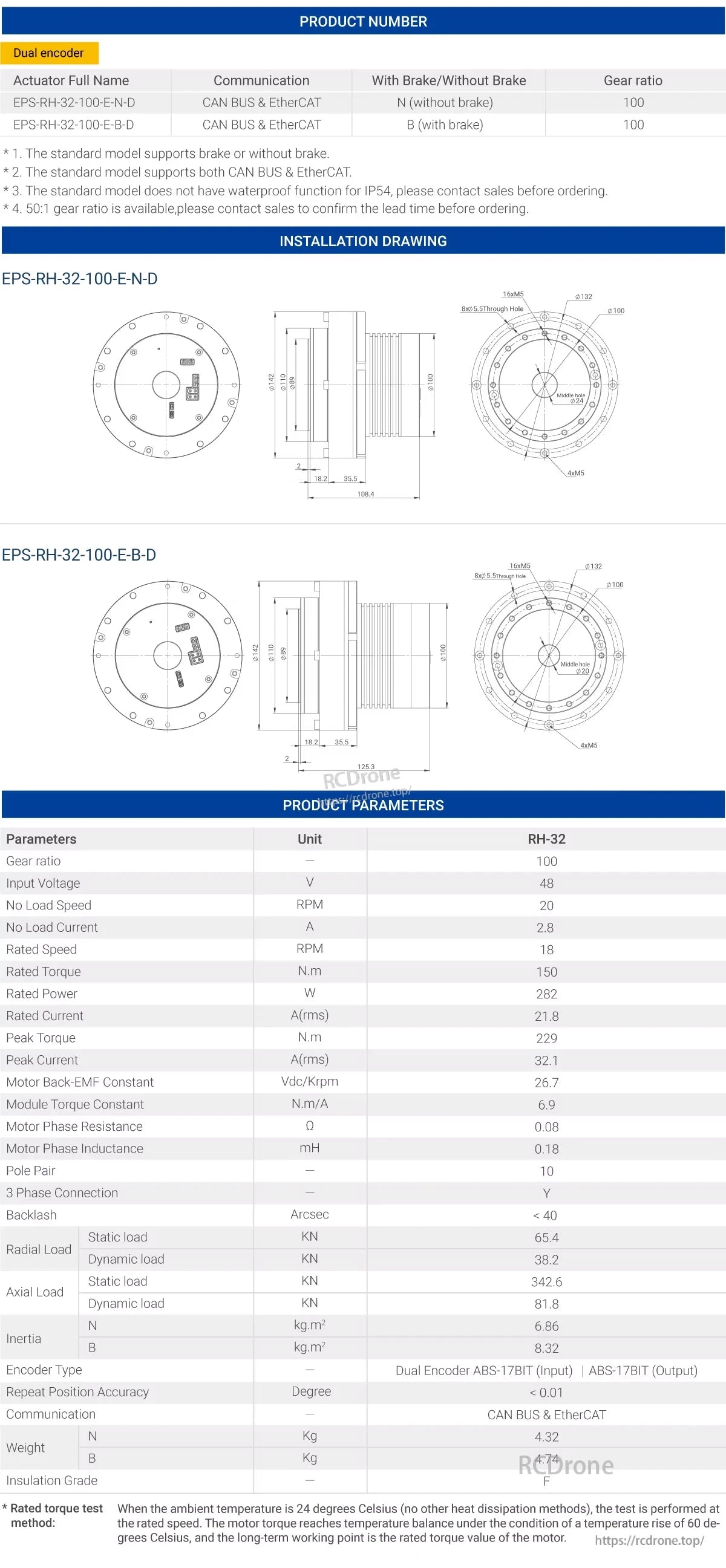
MyActuator RH-32 홀로우 하모닉 로봇 조인트 모듈은 로봇 팔, 휴머노이드 로봇 및 협업 자동화 시스템을 위해 설계된 고토크, 고정밀 액추에이터입니다. 100:1의 기어비, 48V 입력 전압, 229 N·m의 피크 토크를 특징으로 하는 RH-32는 부드러운 동작, 정확한 제어 및 높은 하중 용량이 필요한 응용 프로그램에서 뛰어난 성능을 보장합니다. 듀얼 인코더(17비트 입력/출력), CAN BUS &및 EtherCAT 통신을 지원하며, 홀로우 샤프트 디자인으로 고급 로봇 시스템에 원활하게 통합됩니다.
주요 특징
-
고토크 성능 – 최대 150 N·m의 정격 토크와 229 N·m의 피크 토크를 제공하여 중량급 로봇 조인트에 적합합니다.
-
정밀 제어 – 이중 17비트 인코더가 <0.01°의 정밀한 피드백과 반복성을 보장합니다.
-
다양한 통신 – 신뢰할 수 있고 유연한 시스템 통합을 위해 CAN BUS 및 EtherCAT을 지원합니다.
-
강력한 하중 용량 – 최대 342.6 kN 축 방향 정적 하중 및 81.6 kN 축 방향 동적 하중을 처리합니다.
-
콤팩트한 홀 디자인 – 더 깨끗하고 안전한 로봇 설정을 위해 조인트를 통한 케이블 라우팅을 용이하게 합니다.
-
높은 신뢰성 – 산업 내구성을 위한 F 절연 등급 및 고급 열 방출 설계로 평가됩니다.
기술 사양
| 매개변수 | 단위 | 값 |
|---|---|---|
| 기어 비 | — | 100 |
| 입력 전압 | V | 48 |
| 무부하 속도 | RPM | 20 |
| 무부하 전류 | A | 2.8 |
| 정격 속도 | RPM | 18 |
| 정격 토크 | N·m | 150 |
| 정격 전력 | W | 282 |
| 정격 전류 | A(rms) | 21.8 |
| 최대 토크 | N·m | 229 |
| 최대 전류 | A(rms) | 32.1 |
| 모터 역기전력 상수 | Vdc/Krpm | 26.7 |
| 모듈 토크 상수 | N·m/A | 6.9 |
| 모터 상 저항 | Ω | 0.08 |
| 모터 상 인덕턴스 | mH | 0.18 |
| 극 쌍 | — | 10 |
| 3상 연결 | — | Y |
| 백래시 | Arcsec | < 40 |
| 축 방향 하중 (정적/동적) | kN | 65.4 / 38.2 |
| 축 방향 하중 (정적/동적) | kN | 342.6 / 81.6 |
| 관성 (N/B) | kg·m² | 6.86 / 8.32 |
| 인코더 유형 | — | 듀얼 인코더 ABS-17BIT (입력/출력) |
| 위치 반복 정확도 | 도 | < 0.01 |
| 통신 | — | CAN BUS &및 EtherCAT |
| 무게 (N/B) | Kg | 4.32 / 4.74 |
| 절연 등급 | — | F |
인터페이스 설명
RH-32는 EtherCAT 및 CAN 통신을 지원하여 신뢰할 수 있는 실시간 제어를 제공합니다.
-
EtherCAT: 산업 자동화를 위한 고속 결정론적 통신.
-
CAN BUS: 복잡한 다관절 시스템을 위한 유연하고 안정적인 통신.
-
전원, 피드백 및 제어 신호를 위한 전용 커넥터는 안전하고 효율적인 통합을 보장합니다.
포장 정보
-
상자 크기: 165mm × 165mm × 127mm
-
포함된 액세서리:
-
전원 공급 케이블 × 2
-
CAN BUS 통신 케이블 × 2
-
블리더 저항 케이블 × 1
-
멀티 턴 배터리 케이블 × 1
-
120Ω 단자 저항 × 1
-
EtherCAT 통신 케이블 × 2
-
CAN BUS 통신 모듈 × 1 (무료 USB-CAN 어댑터 포함)
- MyActuator RH-32-100 로봇 관절 모듈 x 1
-
응용 분야
-
협동 로봇 (코봇)
-
휴머노이드 및 서비스 로봇
산업용 조작기
-
자동 유도 차량 (AGVs)
-
정밀 위치 결정 시스템
세부사항
로봇 조인트 RH-32는 이중 인코더, CAN BUS/EtherCAT, 100:1 기어 비율, 48V, 150 N.m 토크, 21을 제공합니다.8 현재. 선택적 브레이크, IP54 사용 가능.
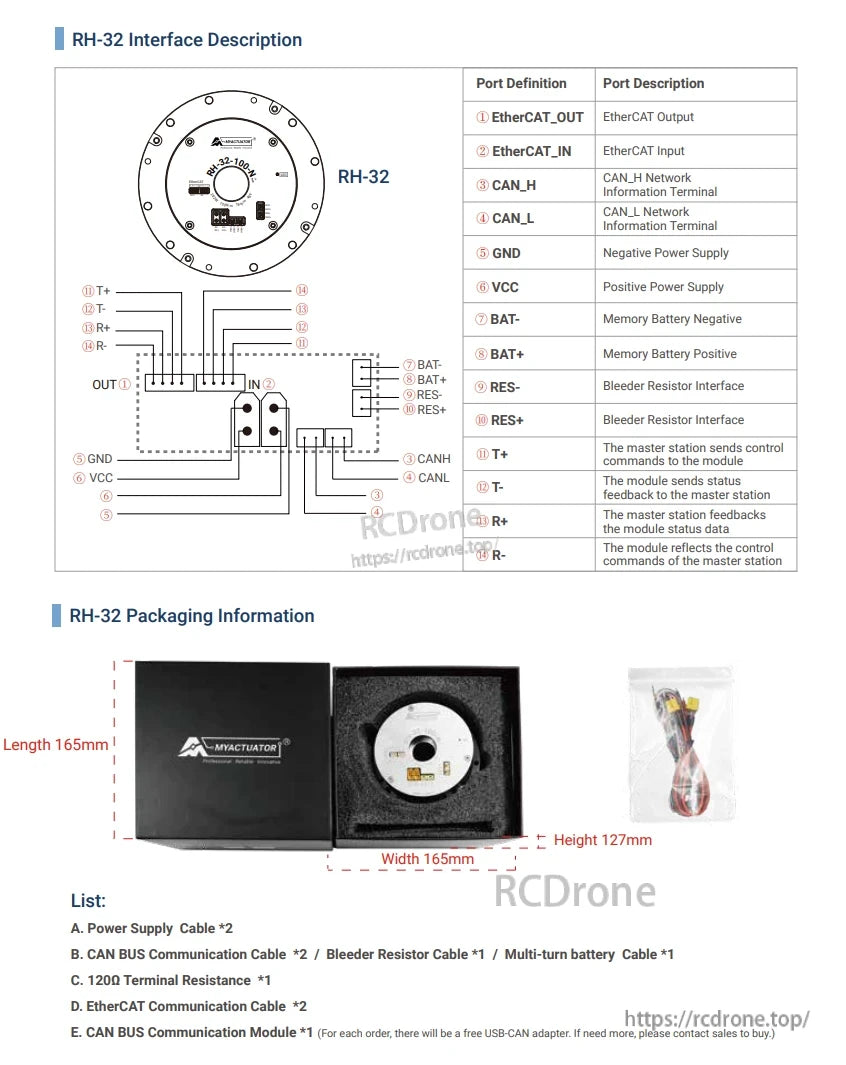
로봇 조인트 RH-32는 EtherCAT 및 CAN 인터페이스, 포트 정의, 치수 165x165x127mm를 특징으로 합니다. 케이블, 단자 저항, CAN 모듈이 포함되어 있습니다.
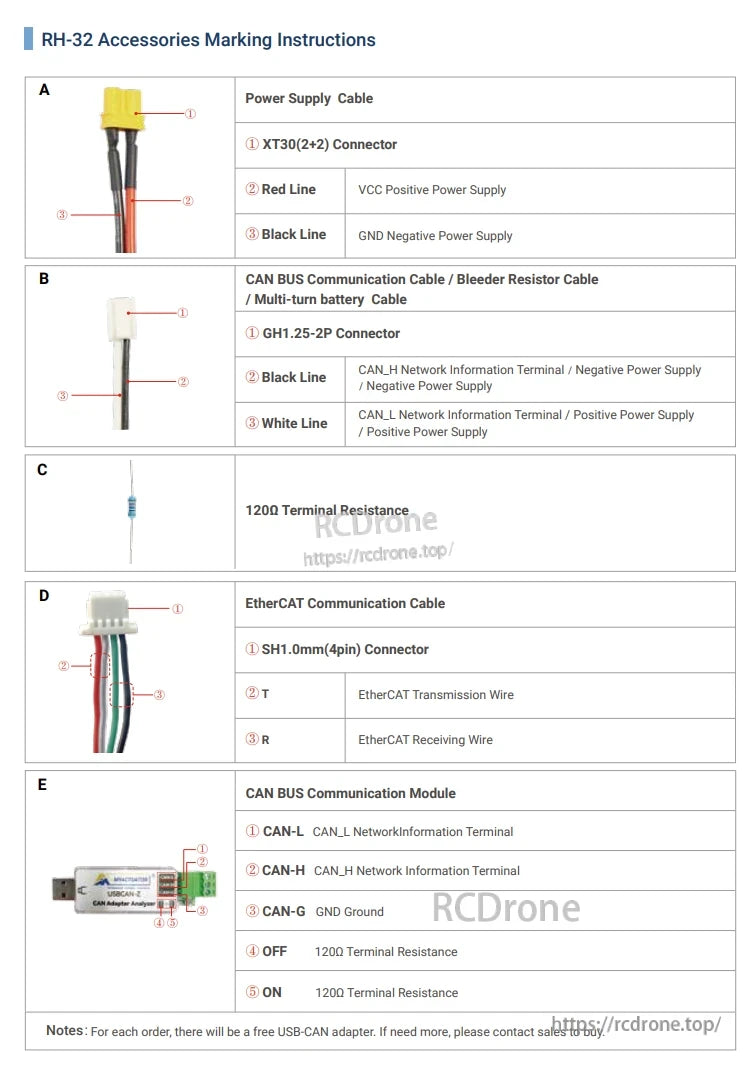
RH-32 액세서리에는 전원, CAN BUS, EtherCAT 케이블, 120Ω 저항 및 CAN 모듈이 포함됩니다. 세부 사항에는 적절한 설치 및 통신을 위한 커넥터, 와이어 기능 및 단자 저항이 포함됩니다. 각 주문에 무료 USB-CAN 어댑터가 포함됩니다.






