





MyActuator RMD-X4-3 플래너터리 서보 액추에이터, 30W 24V 1.5N·m 200RPM 통합 브러시리스 DC 모터, 로봇용 CAN BUS & RS485 지원
MyActuator RMD-X4-3 플래너터리 서보 액추에이터, 30W 24V 1.5N·m 200RPM 통합 브러시리스 DC 모터, 로봇용 CAN BUS & RS485 지원
MyActuator
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
MyActuator RMD-X4-3는 고정밀 행성 서보 액추에이터로, 통합 감속기, 컴팩트한 디자인, 그리고 높은 토크 출력을 특징으로 합니다. 로봇 공학 및 자동화 응용 프로그램, 예를 들어 외골격, AGV 스마트 트럭, 그리고 다축 로봇 팔을 위해 설계된 이 액추에이터는 30W 전력, 1.5 N·m 정격 토크, 그리고 200 RPM 속도를 제공하며, 모두 경량 0.3 kg 하우징 내에 포함되어 있습니다. CAN BUS 및 RS485 통신
주요 특징
-
매끄럽고 효율적인 전력 전송을 위한 통합형 행성 기어 감속기
-
공간이 제한된 응용을 위한 경량 및 컴팩트 디자인
-
조용한 작동을 갖춘 고정밀 브러시리스 모터
-
다양한 보호 시스템: 과열, 과전압, 과전류 및 충전/방전 보호
-
V3와 함께하는 실시간 모니터링 및 조정0 디버깅 소프트웨어
-
높은 내구성과 방청 및 장수명 구조
-
IP54 등급 또는 제동 시스템에 대한 맞춤형 지원
기술 사양
| 매개변수 | 값 |
|---|---|
| 기어 비율 | 6:1 |
| 입력 전압 | 24 V |
| 정격 속도 | 200 RPM |
| 정격 토크 | 1.5 N·m |
| 최대 토크 | 3.0 N·m |
| 정격 전력 | 30 W |
| 정격 전류 | 2 A |
| 최대 전류 | 4 A |
| 효율 | 60% |
| 백래시 | 10 아크분 |
| 축 방향 하중 | 300 N |
| 방사 방향 하중 | 550 N |
| 관성 | 1.2 kg·cm² |
| 인코더 해상도 | 18비트 |
| 통신 | CAN BUS 1M / RS485 (115200/500K/1M/2.5M) |
| 무게 | 0.3 kg |
모터 특성 하이라이트
-
높은 효율 정격 부하 주위에서 곡선 피크
-
넓은 속도 범위에서 부드러운 토크 응답
-
정격 토크 및 하중에서 장시간 작동 시 안정적인 성능
응용 분야
-
외골격 로봇 – 부드럽고 정밀한 관절 작동
-
AGV 스마트 트럭 – 신뢰할 수 있는 고토크 모션 제어
-
다축 로봇 팔 – 정확하고 반복 가능한 위치 결정
-
경량 로보틱스 – 컴팩트하면서도 강력한 구동 솔루션
패키지 내용물
1 × MyActuator RMD-X4-3 플래너리 서보 액추에이터
-
1 × 사용자 문서 및 설치 가이드
-
1 × 전원 및 통신용 표준 케이블 세트
장점
-
높은 신뢰성과 조용한 작동
-
안전한 사용을 위한 고급 보호 기능
-
산업용 CAN 및 RS485 시스템과의 쉬운 통합
-
사용자 친화적인 소프트웨어를 통한 조정 및 모니터링 지원
상세정보

RMD-X4 시리즈는 통합 모터 드라이브, 경량 구조, 내식성, 높은 정밀도, 긴 수명, 맞춤화, 저소음, 정밀 제어, 쉬운 작동, 강력한 하중 용량 및 브러시리스 모터 기술을 갖춘 중공 및 비중공 디자인을 제공합니다.내구성과 높은 성능을 요구하는 애플리케이션을 위해 설계되었습니다.
다양한 보호 기능을 갖추어 안전하고 신뢰할 수 있습니다. 케이블 통과를 용이하게 하는 홀 샤프트 디자인. 맞춤화 및 버스 전류 샘플링을 지원합니다.

MC-100 드라이버가 장착된 고밀도 브러시리스 모터로, 안전하고 조용하며 정밀한 제어를 제공합니다. 소형, 강력한 성능, 실시간 데이터 읽기 및 제어를 위한 V3.0 디버깅 소프트웨어가 특징입니다.
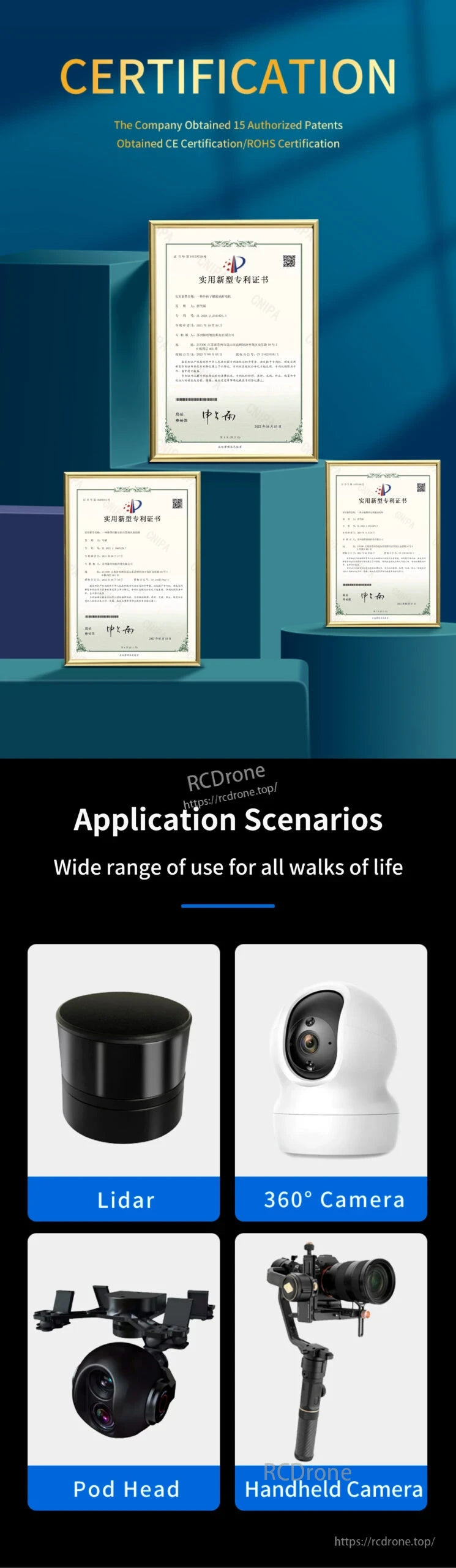
인증은 15개의 승인된 특허와 CE/ROHS 준수를 강조합니다. 애플리케이션에는 다양한 용도의 Lidar, 360° 카메라, 포드 헤드 및 핸드헬드 카메라 시스템이 포함됩니다.

행성형 액추에이터 MRC RMD X4는 6:1 기어비, 24V, 200 RPM, 1.5 N.m 토크, 30W를 제공합니다. CAN BUS 및 RS485를 지원합니다. 설치 도면 및 모터 곡선과 함께 0.3kg의 무게를 가지고 있습니다.





