





MyActuator RMD-X4-36 34N·m 플래너터리 액추에이터 DC 브러시리스 모터(듀얼 엔코더, EtherCAT & CAN 버스, 36:1 기어비)
MyActuator RMD-X4-36 34N·m 플래너터리 액추에이터 DC 브러시리스 모터(듀얼 엔코더, EtherCAT & CAN 버스, 36:1 기어비)
MyActuator
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
MyActuator RMD-X4-36 플래너리 액추에이터 DC 브러시리스 모터는 정밀한 모션 제어, 높은 토크 출력 및 컴팩트한 통합이 필요한 로봇 및 자동화 시스템을 위해 설계된 고성능 조인트 액추에이터입니다. 34N·m 피크 토크, 36:1 기어 비율, 교차 롤러 베어링 구조를 갖춘 이 제품은 뛰어난 항굽힘 능력과 내구성을 제공합니다. EtherCAT + CAN 이중 통신 프로토콜과 250μs 초고속 응답을 특징으로 하여, 이 액추에이터는 휴머노이드 로봇, 로봇 팔, 이동 플랫폼 및 기타 고급 로봇 응용 프로그램에 적합합니다. 이중 인코더 설계 (ABS 17비트 입력 / 18비트 출력)는 초고정밀 위치 결정을 보장하며, 컴팩트한 크기 (55mm × 61mm, 0.36kg)는 경량 및 효율적인 통합을 가능하게 합니다.
주요 특징
-
고정밀 듀얼 인코더: 0.01° 정확도를 위한 17비트(입력) + 18비트(출력).
-
EtherCAT + CAN 버스 프로토콜: 250μs 초고속 응답을 통한 유연한 통신.
-
교차 롤러 베어링: 우수한 항굽힘 성능과 긴 서비스 수명.
-
고출력 밀도: 컴팩트한 55mm 직경, 61mm 길이, 그리고 단 0.36kg의 무게.
-
최대 토크 34N·m 및 정격 토크 11.5N·m는 안정적이고 강력한 동작 출력을 보장합니다.
-
높은 효율: 부드러운 FOC(필드 지향 제어) 기술을 갖춘 100W 정격 전력.
-
다양한 응용: 휴머노이드 로봇, 외골격, 조작기 및 자동화 시스템을 위해 설계되었습니다.
사양
| 매개변수 | 값 |
|---|---|
| 모델 | RMD-X4-P36-36-C |
| 입력 전압 | 24V |
| 기어비 | 36:1 |
| 무부하 속도 | 111 RPM |
| 무부하 전류 | 0.9 A |
| 정격 속도 | 83 RPM |
| 정격 토크 | 11.5 N·m |
| 정격 출력 전력 | 100 W |
| 최대 토크 | 34 N·m |
| 최대 위상 전류 | 21.5 A (rms) |
| 폴 쌍 | 13 |
| 인코더 유형 | 듀얼 인코더 ABS 17비트 (입력) / 18비트 (출력) |
| 통신 프로토콜 | EtherCAT / CAN 버스 |
| 크기 | Ø55mm × 61mm |
| 무게 | 0.36 kg |
패키지 내용물
-
1 × RMD-X4-36 플래너리 액추에이터 모터
-
1 × 전원 공급 장치 + CAN 버스 통신 케이블
-
1 × 120Ω 단자 저항
-
2 × EtherCAT 통신 케이블
-
1 × CAN 버스 통신 모듈 (USB-CAN 어댑터)
응용 분야
-
휴머노이드 및 생체 로봇
-
협동 로봇 팔
-
외골격 및 재활 로봇
-
서비스 로봇 및 이동 플랫폼
-
콤팩트하고 고토크 액추에이터가 필요한 정밀 자동화 시스템
세부사항

34N.m 피크 토크, 36:1 기어 비율을 가진 행성 액추에이터, 0.36kg 중량, Ø55mm×61mm 크기. EtherCAT/CANBUS 통신, 이중 인코더, 고속 MCU, CAN 칩, 교차 롤러 베어링의 특징이 있습니다.

RMD-X4-P36-36 모터: 24V, 10.5N.m 토크, 83RPM, 이중 인코더, EtherCAT+CAN BUS, 36 기어비, 0.36kg, ABS-17BIT/18BIT 인코더, 상세 치수 포함.

X4-36 모터, 100W, 12N.m, 이중 인코더, 17BIT 입력, 18BIT 출력, 63rpm, 1:36 기어비, CAN 버스 인터페이스, LED 표시기.

MYACTUATOR X4-36 모터, 100W, 12N.m, 이중 인코더, 83rpm, 1:36 비율. 전원 공급 장치, CAN BUS 케이블, 120Ω 저항기, EtherCAT 케이블 및 무료 USB-CAN 어댑터가 포함된 CAN BUS 모듈이 포함되어 있습니다.
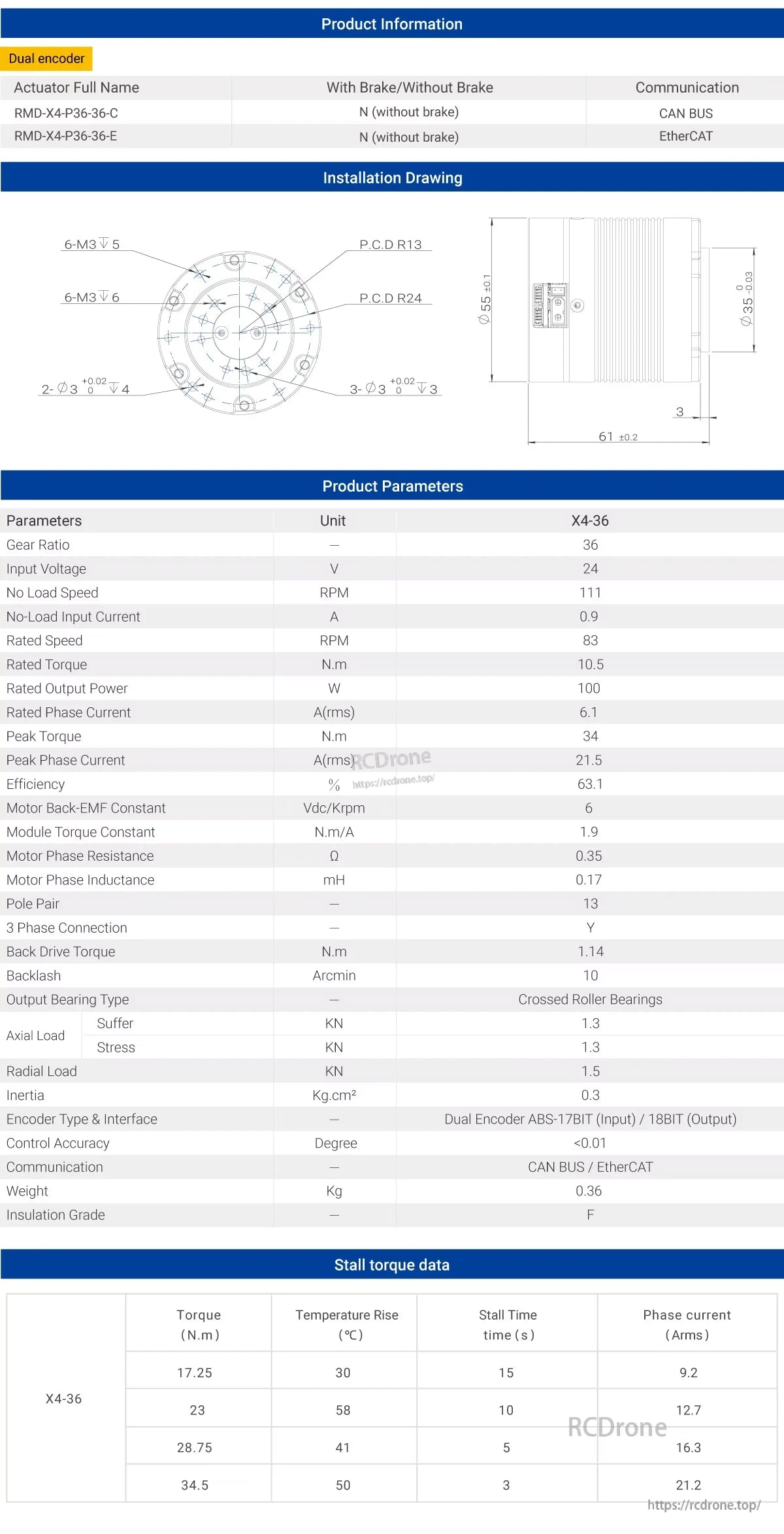
RMD-X4-P36-36 모터는 이중 인코더, 36 기어비, 24V 입력, 100W 출력을 갖추고 있으며, CAN BUS/EtherCAT을 지원합니다. 정격 토크: 10.5 N.m, 속도: 83 RPM, 중량: 0.36 kg. 정지 토크 데이터에는 토크, 온도 상승, 시간 및 위상 전류 값이 포함됩니다.

인터페이스 세부 사항에는 전원, CAN 및 EtherCAT 포트가 포함됩니다. 패키징에는 모터, 케이블, 저항기, 통신 모듈이 포함되어 있습니다. 치수: 100x100x70mm. USB-CAN 어댑터가 포함되어 있습니다.
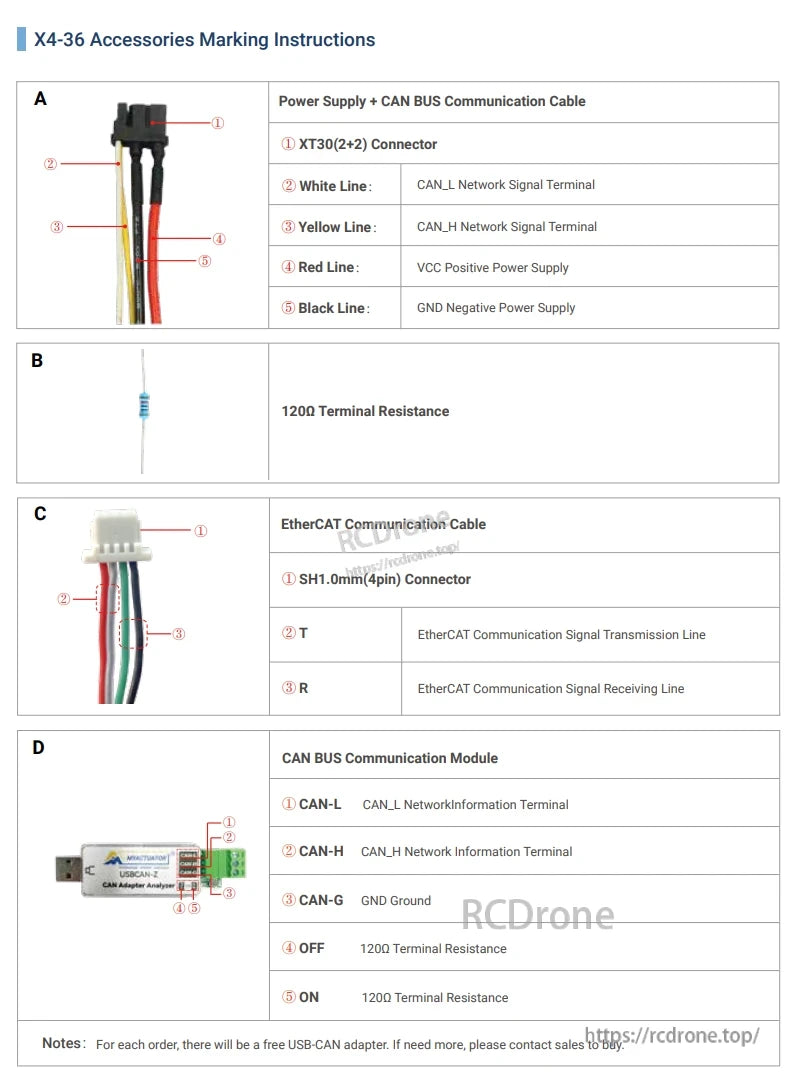
X4-36 액세서리에는 전원 공급 장치, CAN BUS, EtherCAT 케이블, 120Ω 저항 및 CAN 모듈이 포함됩니다. 세부 사항에는 통신 및 전원 연결을 위한 커넥터, 와이어 색상, 신호선 및 단자 설정이 포함됩니다. 각 주문에 USB-CAN 어댑터가 포함되어 있습니다.





