




MyActuator RMD-X8-120 서보 모터 액추에이터 48V 574W 110N·m 피크 토크 듀얼 엔코더 EtherCAT CAN BUS 로봇 및 로봇 팔용
MyActuator RMD-X8-120 서보 모터 액추에이터 48V 574W 110N·m 피크 토크 듀얼 엔코더 EtherCAT CAN BUS 로봇 및 로봇 팔용
MyActuator
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
MyActuator RMD-X8-120 서보 모터는 행성 기어박스, 이중 17비트 인코더, 및 고성능 드라이브 컨트롤러를 통합하여 강력한 토크와 정밀한 모션 제어를 제공합니다. 574W 정격 전력, 43N·m 정격 토크, 및 최대 110N·m 피크 토크를 지원하여 휴머노이드 로봇, 로봇 팔, 사족 보행 로봇 및 기타 지능형 자동화 시스템에 적합합니다. CAN BUS 및 EtherCAT 프로토콜을 지원하여 현대 로봇 플랫폼과의 원활한 통합을 보장합니다.
주요 사양
| 매개변수 | 값 |
|---|---|
| 모델 | RMD-X8-P20-120-C |
| 기어비 | 19.612:1 |
| 전압 | 48V |
| 무부하 속도 | 158 RPM |
| 정격 속도 | 127 RPM |
| 무부하 전류 | 1.6 A |
| 정격 토크 | 43 N·m |
| 최대 토크 | 110 N·m |
| 최대 위상 전류 | 43.8 A (rms) |
| 정격 전력 | 574 W |
| 무게 | 1.4 kg |
| 치수 | Φ96 mm × 76 mm 높이 |
| 인코더 유형 | 듀얼 인코더 ABS-17BIT (입력) / 17BIT (출력) |
| 통신 | CAN BUS / EtherCAT |
인터페이스 및 연결성
-
EtherCAT IN/OUT 고속, 실시간 통신을 위한
-
CAN_H 및 CAN_L CAN BUS 네트워킹을 위한 단자
-
VCC/GND 전원 입력 (48V) 용
-
신호 채널 (T-/T+/R-/R+) 명령 및 상태 피드백 용
포함된 액세서리
-
2× 전원 공급 장치 + CAN BUS 통신 케이블
2× 이더캣 통신 케이블
-
1× 120Ω 종단 저항
-
1× USB-CAN 어댑터가 포함된 CAN BUS 통신 모듈
주요 특징
-
고정밀 제어 – 듀얼 17비트 절대 인코더를 통해 정확한 위치, 속도 및 토크 제어가 가능합니다.
-
높은 토크 출력 – 정격 토크 43N·m, 최대 110N·m으로 까다로운 하중에 적합합니다.
-
통합 설계 – 설치가 용이한 플래닛 기어박스와 구동 모듈이 포함된 컴팩트한 구조입니다.
-
이중 프로토콜 지원 – 유연한 통합을 위해 CAN BUS 및 EtherCAT과 호환됩니다.
-
견고한 구조 – 고강도 크로스 롤러 베어링이 무거운 하중에서도 내구성을 보장합니다.
응용 프로그램
-
휴머노이드 로봇 관절
-
협동 로봇 팔
-
사족 및 이족 로봇
-
외골격 시스템
-
자율 이동 플랫폼
-
고정밀 산업 자동화
세부사항

M-RMD X8-120 서보 액추에이터는 듀얼 인코더, 48V 입력, 43 N.m토크, 574W 전력, CAN BUS/EtherCAT, 19.612 기어 비율, 10극 쌍, 1.40kg 무게 및 정지 토크 세부정보를 제공합니다.
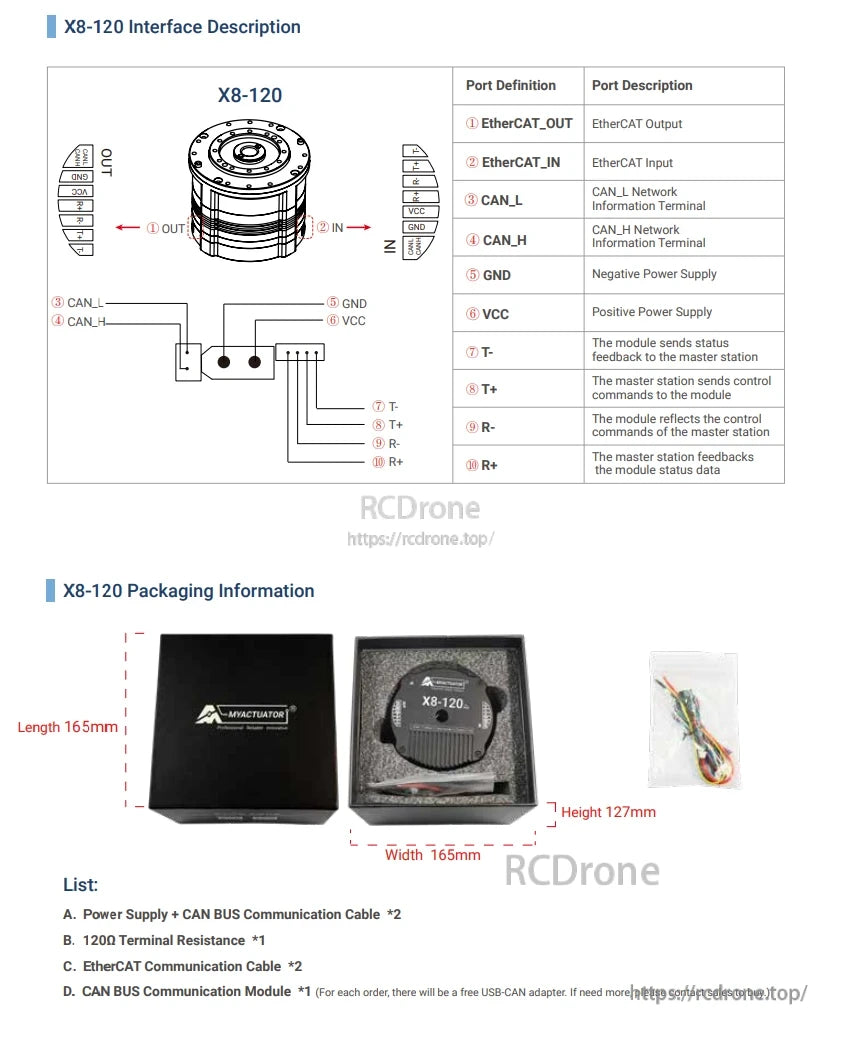
X8-120 서보 인터페이스는 EtherCAT 및 CAN 버스를 지원하며, 전원, 신호 연결 및 USB-CAN 어댑터를 포함합니다. 포장 크기: 165x165x127mm. 전원 공급 장치, 케이블, 단자 저항 및 통신 모듈이 포함되어 있습니다.

MyActuator X8-120 액세서리에는 CAN BUS 케이블이 포함된 전원 공급 장치, 120Ω 단말 저항, EtherCAT 케이블 및 CAN BUS 모듈이 포함됩니다. 세부 사항에는 커넥터, 전선 기능 및 통신 및 전원을 위한 단자가 포함됩니다. 주문당 무료 USB-CAN 어댑터가 포함됩니다.

MyActuator X8-120 서보 모터, 574W, 45N.m, 듀얼 인코더, 127rpm, 1:20 비율. 전원+CAN BUS 케이블, EtherCAT 케이블 및 120Ω 종단기가 포함되어 있습니다. CE ROHS 인증.

EtherCAT + CAN BUS 듀얼 인코더 서보, 모델 RMD-X8-P20-120-C, 48V, 19.612 감속 비율, 127RPM, 43N.m 토크, 574W 출력, 1.4kg 중량, 고속 MCU, CAN 칩 및 교차 롤러 베어링이 특징입니다.

듀얼 인코더 ABS-17BIT 입력/출력, X8-120CL, 힘-위치 하이브리드 제어 및 정밀 토크 제어를 지원합니다.

MYACTUATOR X8-120 서보 모터, 전원, CAN BUS, EtherCAT 케이블 및 120Ω 종단 저항 포함. 포장에는 전원 및 통신 라인이 각각 두 개씩 포함되어 있습니다.

통합된 행성 기어 모듈, 이중 인코더, EtherCAT/CAN 통신, 최대 토크 120N.m, 크기 96mm×76mm, 로봇 관절용.




