





OYMotion ROH-AP001 정교한 로봇 핸드, 6자유도, 11관절, 힘 센서, UART/RS485/CAN, PID 제어, 0.7초
OYMotion ROH-AP001 정교한 로봇 핸드, 6자유도, 11관절, 힘 센서, UART/RS485/CAN, PID 제어, 0.7초
OYMotion
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
OYMotion ROH-AP001 다관절 손은 11개의 이동 가능한 관절과 6개의 내장 모터 드라이버를 갖춘 로봇 손으로, 6개의 능동적인 자유도를 제공합니다. 내장된 PID 모터 제어 알고리즘은 물체의 정확하고 반복 가능한 잡기 및 조작을 가능하게 합니다. 각 손가락에는 실시간 모니터링 및 그립 힘의 폐쇄 루프 제어를 위한 힘 센서가 통합되어 있습니다. 물리적 인터페이스에는 UART, RS485 또는 CAN FD가 포함되며, SerialCtrl 전용 직렬 프로토콜, ModBus-RTU 및 CAN 프로토콜을 지원합니다. SDK를 통한 2차 개발을 위해 ROS/ROS2 플랫폼이 지원됩니다(라이센스 계약 필요).
주요 특징
- 6개의 능동적인 DOF와 11개의 관절; 자연스러운 그립을 위한 독립적으로 모터화된 손가락.
- 내장 모터 드라이버 및 PID 제어; 모든 작동이 손에 통합되어 있습니다.
- 각 손가락에 힘 감지 센서가 있어 촉각 피드백과 실시간 힘 제어가 가능합니다.
- 전원으로 구동되는 엄지 회전 및 접이식 손가락 디자인.
- 손끝에서 지원되는 터치 스크린 작동.
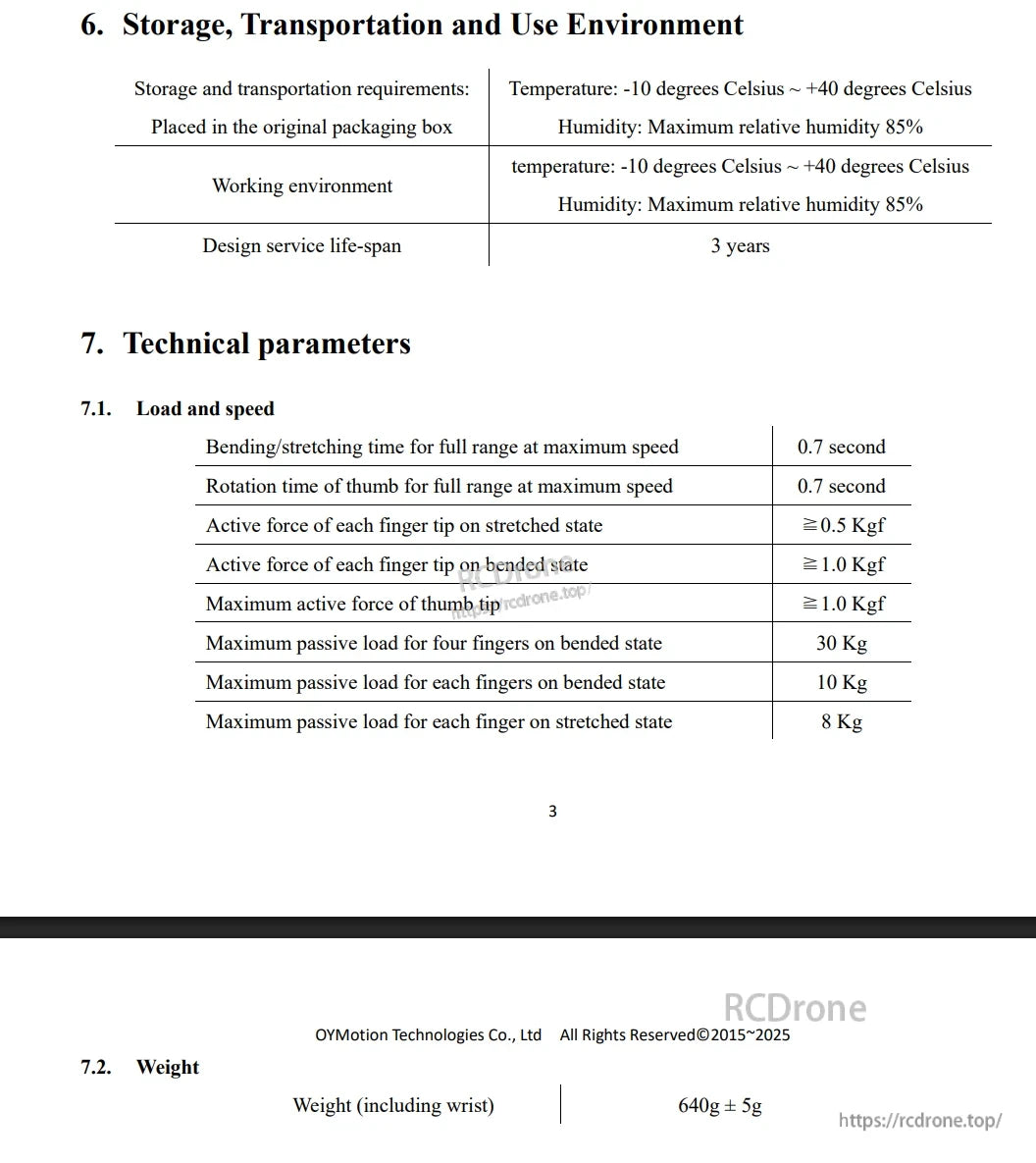
- 빠른 동작: 0.7초 만에 전체 범위 굽힘/신장 및 0.7초 만에 엄지 전체 범위 회전.
- 하중 용량: 네 개의 손가락(구부러진 상태)에서 최대 30Kg의 수동 하중, 각 손가락(구부러진 상태)에서 10Kg, 각 손가락(펴진 상태)에서 8Kg.
- 인간과 유사한 크기와 비율; 부드러운 손가락 패드와 실리콘 장갑; 맞춤형 손목 디자인; 메시지 비퍼.
- 인터페이스 및 프로토콜: UART/RS485/CAN과 SerialCtrl 및 ModBus-RTU; 1M 보드에서 CAN.
- 사용된 재료: 알루미늄 합금, 아연 합금, 스테인리스 스틸, 실리콘, 플라스틱.
사양
| 활성 DOF | 6 |
| 움직일 수 있는 관절 (관절부) | 11 |
| 중지 끝에서 손목까지의 수직 거리 | 183 mm |
| 엄지 끝에서 손목까지의 수직 거리 | 95 mm |
| 엄지 길이 | 111 mm |
| 최대 손바닥 너비 | 82 mm |
| 손목 지름 | 49 mm |
| 엄지 쪽 최대 개폐 각도 | 0~31 ° |
| 엄지에서 손바닥까지의 최대 개폐 각도 | 0~50 ° |
| 엄지 측면 회전 각도 | 0~90 ° |
| 최대 속도로 전체 범위의 굽힘/펴기 시간 | 0.7초 |
| 최대 속도에서 전체 범위를 위한 엄지 손가락 회전 시간 | 0.7초 |
| 늘어난 상태에서 각 손가락 끝의 활성 힘 | ≥0.5 Kgf |
| 구부린 상태에서 각 손가락 끝의 활성 힘 | ≥1.0 Kgf |
| 엄지 손가락 끝의 최대 활성 힘 | ≥1.0 Kgf |
| 구부린 상태에서 네 개의 손가락의 최대 수동 하중 | 30 Kg |
| 구부린 상태에서 각 손가락의 최대 수동 하중 | 10 Kg |
| 펴진 상태에서 각 손가락의 최대 수동 하중 | 8 Kg |
| 손가락 터치 스크린 기능 | 지원됨 |
| 손가락 힘 피드백 | 지원됨 |
| 작동 환경 온도 | -10 °C ~ +40 °C |
| 작동 환경 습도 | 최대 상대 습도 85% |
| 설계 서비스 수명 | 3년 |
| 무게 (손목 포함) | 640 g ± 5 g |
| 통신 인터페이스 | UART/RS485/CAN |
| 전송 속도 | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| 지원 프로토콜 | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| 재료 | 알루미늄 합금; 아연 합금; 스테인리스 스틸; 실리콘; 플라스틱 |
응용 분야
- 로봇 말단 장치 및 휴머노이드 로봇.
- 교육 및 연구 장비.
- 생체 공학 의수.
- 산업 자동화 및 AGV 시스템.
주문 지원, 통합 안내 또는 기술 지원이 필요하시면 [email protected] or에 문의하시거나 https://rcdrone.top/를 방문해 주십시오.
매뉴얼
상세정보

ROHand는 내장된 PID 모터 제어를 통해 ±1mm의 위치 정확도를 제공하며, 집게질 및 잡기와 같은 인간 손 동작을 시뮬레이션하기 위해 여섯 개의 능동적인 자유도를 제공합니다. 휴머노이드 로봇, 로봇 엔드 이펙터, 검사 시스템, 지능형 생체 공학 의수 및 교육 또는 연구 응용 프로그램에 이상적이며, 복잡한 작업에서 다재다능하고 정밀한 조작을 지원하는 디자인입니다.
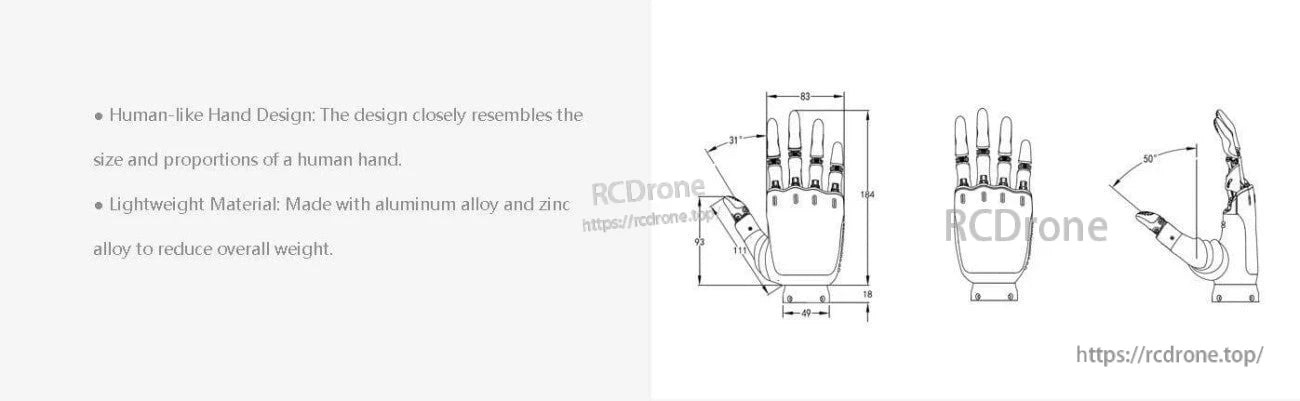
경량 알루미늄 아연 합금 구조와 정밀한 치수를 가진 인간과 유사한 다재다능한 로봇 손.

OYMotion ROH-AP001 다재다능한 로봇 손은 인간의 비율을 모방하며, 정밀하고 실물 크기의 로봇 조작을 위한 관절이 있는 손가락과 센서를 특징으로 합니다.
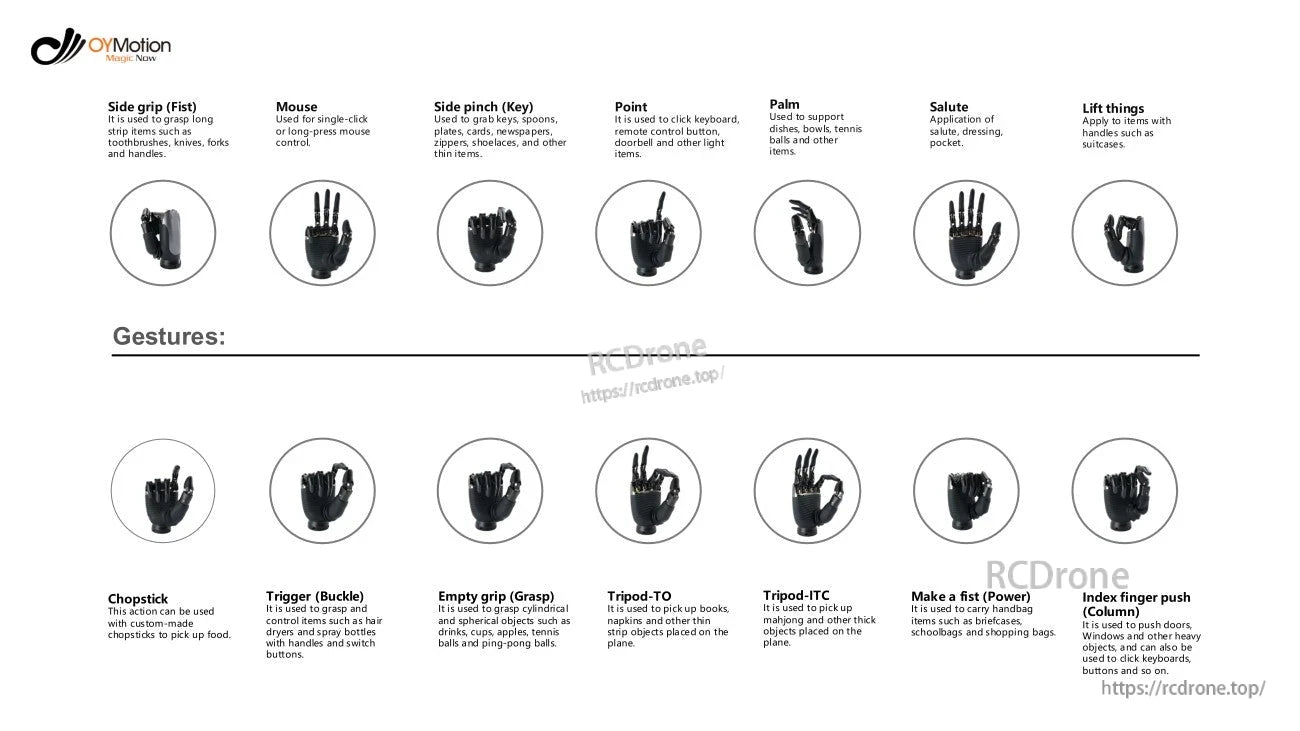
OYMotion 로봇 손은 그립, 포인팅, 리프팅과 같은 14가지 정밀 제스처를 수행하여 젓가락 사용, 가방 운반 또는 키보드 클릭과 같은 일상적인 작업을 처리하며, 고급 손재주와 실용성을 보여줍니다.

OYMotion 로봇 손은 모터화된 손가락, 접이식 디자인, 부드러운 패드, 전원 공급되는 엄지손가락, 실리콘 장갑, 내장된 작동 장치, 비퍼, 맞춤형 손목 및 RS485 커넥터를 제공하여 자연스러운 그립을 가능하게 합니다.
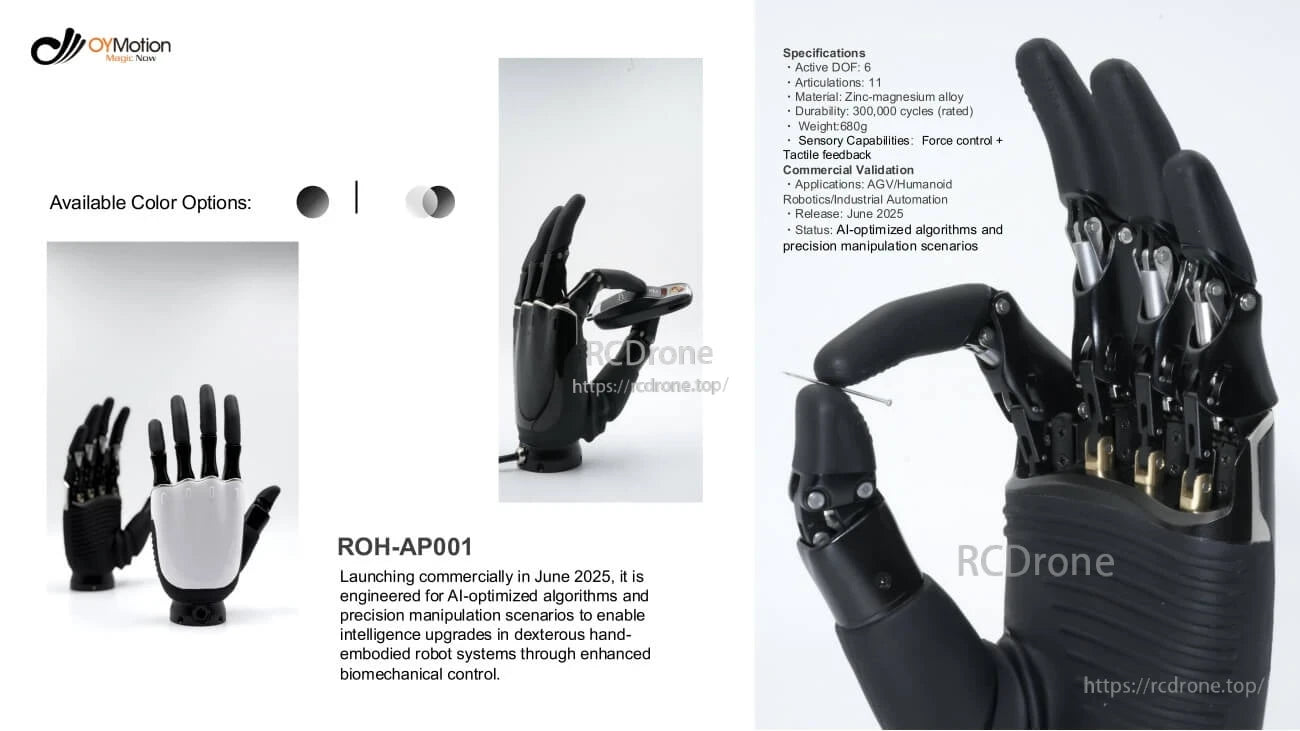
OYMotion ROH-AP001 다재다능한 로봇 손은 6개의 활성 DOF, 11개의 관절, 아연-마그네슘 합금 구조, 300k 사이클 내구성, 무게 680g을 가지며, AI 및 정밀 작업을 위한 힘/촉각 피드백을 제공합니다—2025년 6월 출시 예정입니다.

OYMotion ROH-AP001 로봇 손은 모터화된 손가락, 전동 엄지, 실리콘 장갑 및 내장된 작동 장치를 갖추고 있습니다. 알루미늄, 아연, 강철, 실리콘 및 플라스틱으로 제작되었으며, 비퍼, 맞춤형 손목, RS485 프로토콜, 접이식 디자인 및 압력 스프링이 포함되어 있습니다.
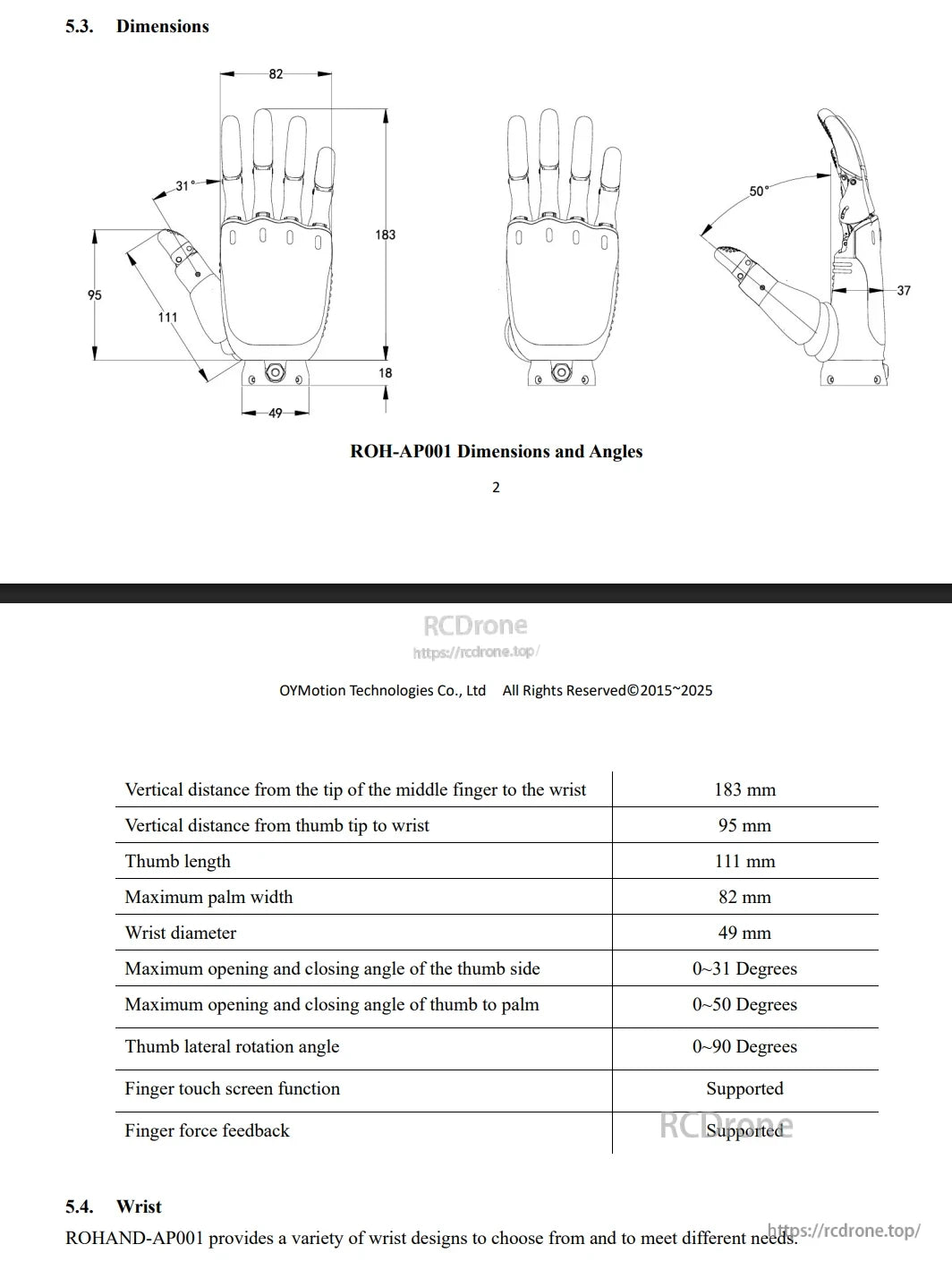
ROH-AP001 로봇 손의 치수는 손가락에서 손목까지의 높이가 183mm, 엄지에서 손목까지 95mm, 엄지 길이가 111mm, 손바닥 너비가 82mm, 손목 지름이 49mm입니다. 엄지 각도: 측면 0-31°, 손바닥에 대해 0-50°, 회전 0-90°. 터치 스크린 및 힘 피드백을 지원합니다.
OYMotion ROH-AP001 로봇 손은 -10°C에서 +40°C 사이에서 작동하며, 최대 습도는 85%입니다. 설계 수명: 3년. 무게: 640g ±5g. 손가락 활성 힘 ≥0.5–1.0 Kgf; 네 개의 손가락에 대해 최대 30kg의 수동 하중을 견딜 수 있습니다.





