





OYMotion ROH-LiteS001 로봇 핸드 – 실물 크기 정밀 손, 전동 엄지, UART/RS485/CAN, DC 12-24V, 457g
OYMotion ROH-LiteS001 로봇 핸드 – 실물 크기 정밀 손, 전동 엄지, UART/RS485/CAN, DC 12-24V, 457g
OYMotion
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
OYMotion ROH-LiteS001 로봇 손은 실제 크기의 손으로 인간의 비율에 맞춰 설계되었습니다. 손 안에 모든 작동이 통합되어 있으며, 자연스러운 그립을 위한 독립적으로 모터화된 손가락과 여러 개의 개방 각도를 가진 전동 엄지 회전 기능을 갖추고 있습니다. 디자인에는 안정적인 접촉을 위한 부드러운 손가락 패드와 실리콘 장갑이 포함되어 있으며, 상태 피드백을 위한 LED 표시기와 메시지 비퍼가 있습니다. 표준 산업 통신 인터페이스(UART/RS485/CAN) 및 프로토콜이 쉽게 통합될 수 있도록 합니다.
주요 특징
- 자연스러운 그립을 위한 독립적으로 모터화된 손가락
- 전동 엄지 회전; 접이식 손가락 디자인
- 부드러운 손가락 패드와 실리콘 장갑
- 모든 작동이 손 안에 통합됨
- LED 표시기와 메시지 비퍼
- 맞춤형 손목 디자인 및 고정 커넥터
- 빠른 동작: 0.7초 만에 전체 범위 굽힘/신장; 0.7초 엄지 회전
- 터치 스크린 기능 지원
- 손가락당 강력한 수동 하중 등급
- 인터페이스: UART/RS485/CAN, SerialCtrl 및 ModBus-RTU 지원
- 작동 환경: -10도에서 +40도; 최대 상대 습도 85%
제품 문의 또는 지원을 원하시면 https://rcdrone.top/로 연락하시거나 [email protected]로 이메일을 보내주십시오.
사양
| 중지 끝에서 손목까지의 수직 거리 | 169 mm | |
| 엄지 끝에서 손목까지의 수직 거리 | 97 mm | |
| 엄지 길이 | 110 mm | |
| 최대 손바닥 너비 | 75 mm | |
| 손목 지름 | 49 mm | |
| 엄지 쪽 최대 개폐 각도 | 0~31도 | |
| 엄지에서 손바닥까지의 최대 개폐 각도 | 0~50도 | |
| 엄지 측면 회전 각도 | 0~90도 | |
| 손가락 터치 스크린 기능 | 지원됨 | |
| 작동 환경 | 온도: -10도 ~ +40도; 습도: 최대 상대 습도 85% | |
| 최대 속도에서 전체 범위의 굽힘/신축 시간 | 0. | 7초 |
| 최대 속도에서 전체 범위를 위한 엄지의 회전 시간 | 0.7초 | |
| 늘어난 상태에서 각 손가락 끝의 활성 힘 | ≥0.45 Kgf | |
| 구부린 상태에서 각 손가락 끝의 활성 힘 | ≥1.0 Kgf | |
| 엄지 끝의 최대 활성 힘 | ≥1.0 Kgf | |
| 구부린 상태에서 네 개의 손가락에 대한 최대 수동 하중 | 25 Kg | |
| 구부린 상태에서 각 손가락에 대한 최대 수동 하중 | 8 Kg | |
| 펴진 상태에서 각 손가락에 대한 최대 수동 하중 | 5 Kg | |
| 무게 (손목 포함) | 457g +/-5g | |
| 전원 공급 | DC 12-24V; 정격 전력 48W | |
| 통신 인터페이스 | UART/RS485/CAN | |
| 전송 속도 | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M | |
| 지원되는 프로토콜 | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl | |
| 설계 서비스 수명 | 3년 |
포함된 내용
- ROHAND 다재다능한 손 (모델 ROH-LiteS001): 1개
- 사용 설명서: 1부
- 증명서: 1개
- 보증 카드: 1개
응용 분야
- 마우스: 단일 클릭 또는 길게 누르기 제어
- 측면 집기 (키): 열쇠, 숟가락, 접시, 카드, 신문, 지퍼, 신발 끈 및 기타 얇은 물체를 잡기
- 포인트: 키보드 클릭, 리모컨 버튼, 초인종 및 기타 가벼운 물체
- 손바닥: 접시, 그릇, 공 및 유사한 물체를 지지
- 경례 및 복장 제스처
- 손잡이가 있는 물체, 예를 들어 여행가방을 들어올리기
- 젓가락: 맞춤형 젓가락을 사용하여 음식을 집기
- 트리거 (버클): 손잡이와 스위치 버튼이 있는 물체를 잡고 제어하기
- 빈 그립 (잡기): 음료, 컵, 사과, 테니스 공 및 탁구 공과 같은 원통형 및 구형 물체를 잡기
- Tripod-TO: 평면에 놓인 책, 냅킨 및 얇은 스트립 물체를 집어 올리기
- Tripod-ITC: 평면에 놓인 마작 및 기타 두꺼운 물체를 집어 올리기
- 주먹 쥐기 (파워): 서류가방, 학교 가방 및 쇼핑백과 같은 핸드백 아이템을 운반하기
- 검지 손가락 밀기 (컬럼): 문, 창문 및 무거운 물체를 밀고; 키보드와 버튼을 클릭하기
매뉴얼
ROH-LiteS001-Dexterous_Hand.pdf
상세정보



OYMotion ROH-LiteS001 로봇 손은 인간 비율을 모방하며, 센서가 있는 손가락이 유연합니다.고급 로봇 응용 프로그램에서 현실적인 상호작용과 정밀 작업을 위해 설계되었습니다.
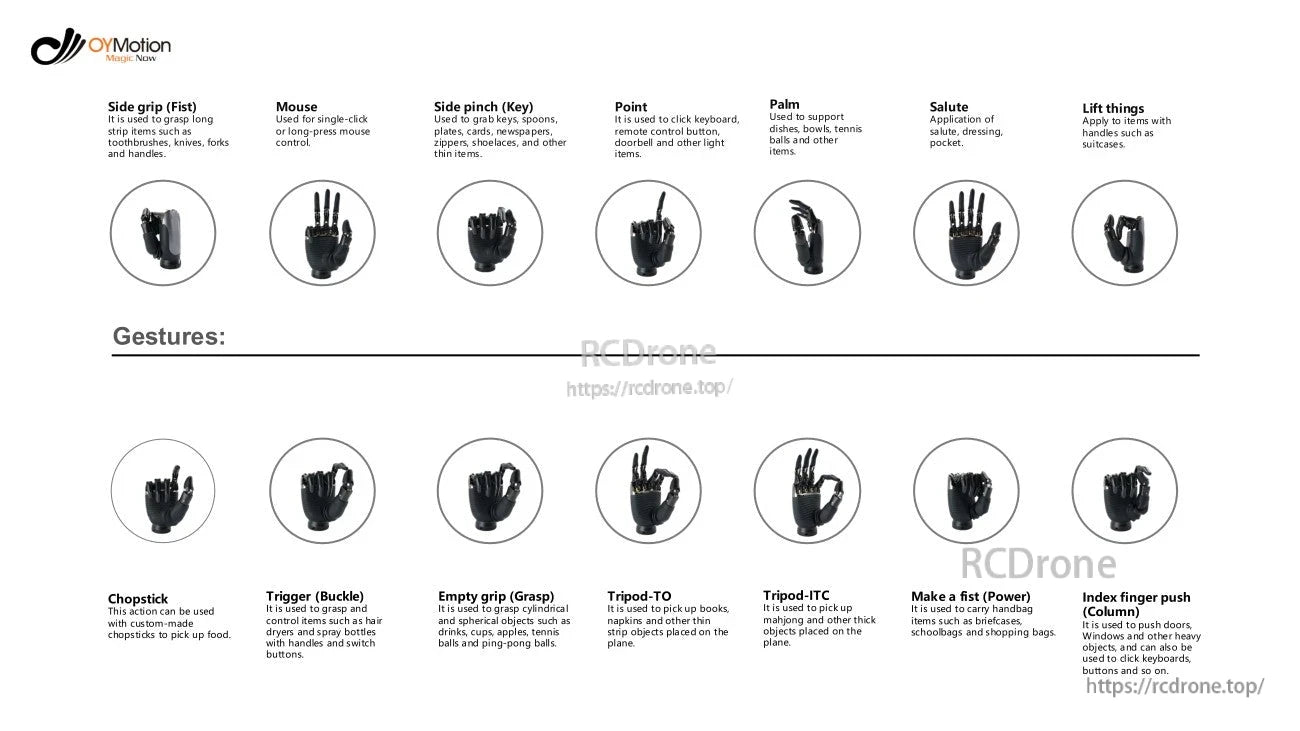
OYMotion ROH-LiteS001 로봇 손은 잡기, 가리키기, 들어올리기 및 열쇠, 조리기구, 전자기기와 같은 물체와의 상호작용과 같은 일상적인 작업을 위한 다양한 그립과 제스처를 보여줍니다.
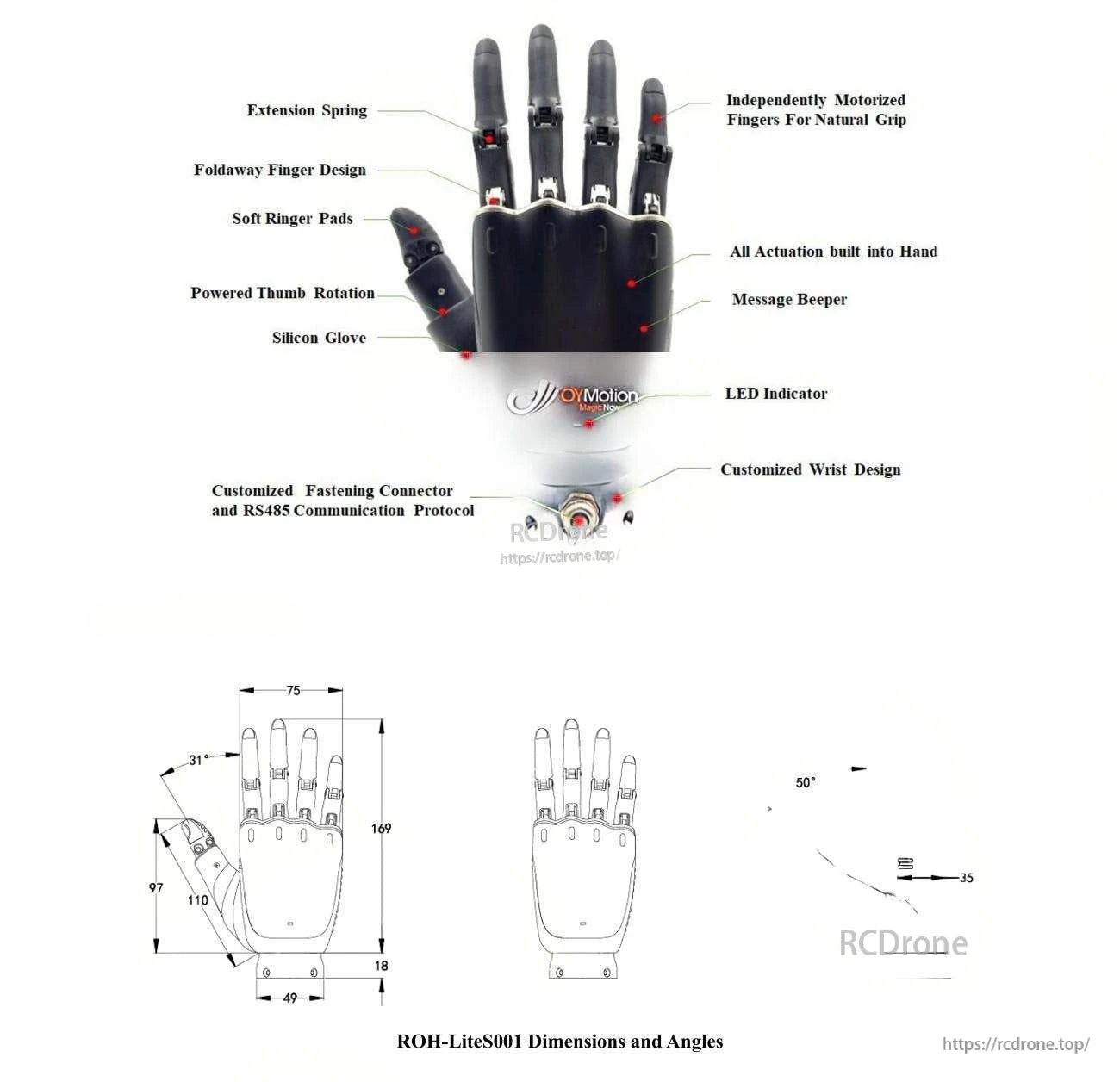
OYMotion ROH-LiteS001 로봇 손에는 모터화된 손가락, 접이식 디자인, 부드러운 패드, 전동 엄지, 실리콘 장갑, 내장 액추에이터, 비퍼, LED, 맞춤형 손목 및 RS485 커넥터가 포함되어 있습니다. 치수와 각도는 아래에 명시되어 있습니다.

ROH-LiteS001 로봇 손에는 모터화된 손가락, 전동 엄지, 실리콘 장갑, LED 표시기, 비퍼, 접이식 디자인, 확장 스프링 및 맞춤형 손목과 고정 커넥터가 있는 RS485 통신이 포함되어 있습니다.
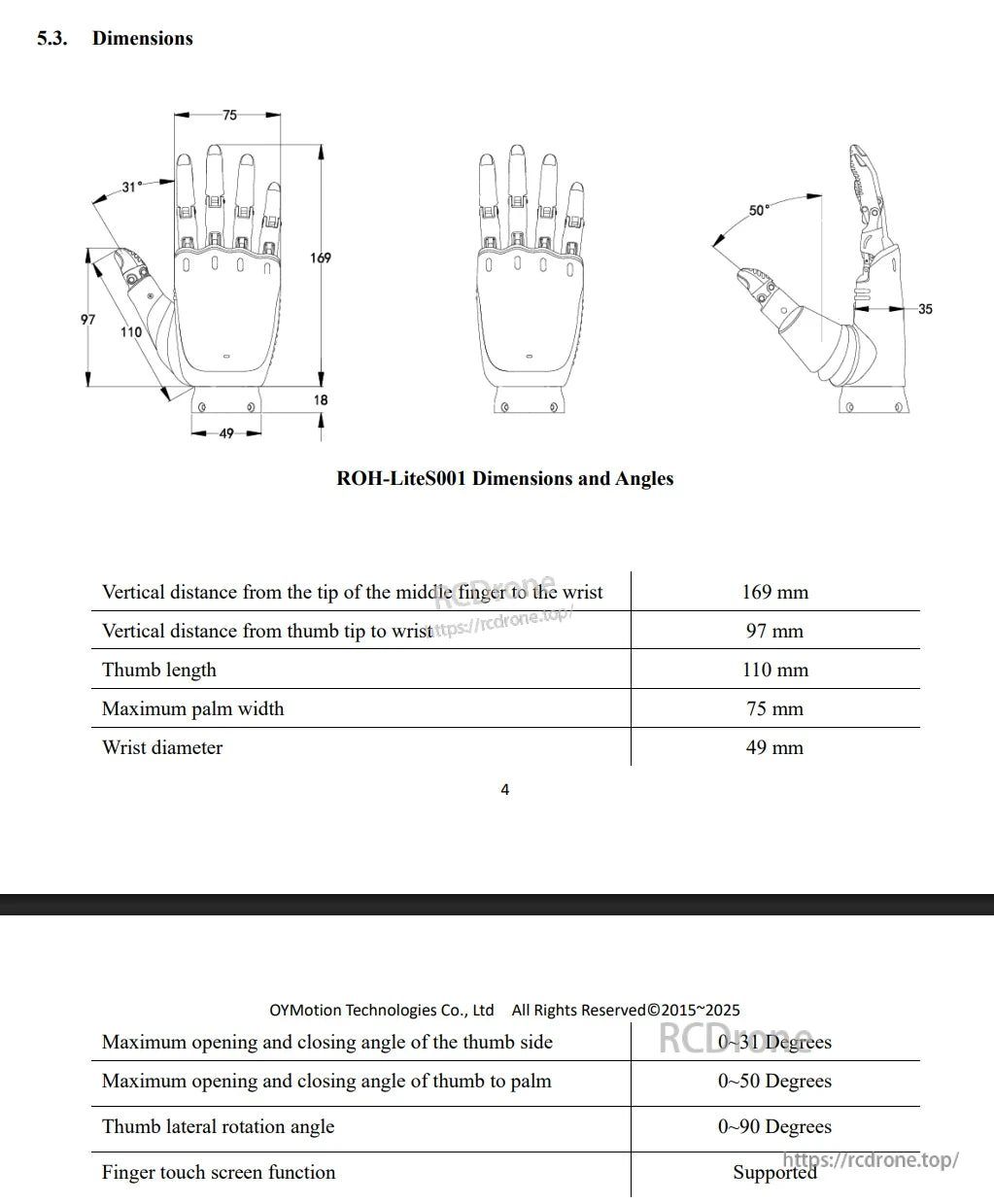
ROH-LiteS001 로봇 손의 치수는 중지에서 손목까지 169mm, 엄지 끝에서 손목까지 97mm, 엄지 길이 110mm, 손바닥 너비 75mm, 손목 지름 49mm입니다. 엄지 각도: 측면 0-31°, 손바닥에 대해 0-50°, 회전 0-90°. 터치스크린 기능 지원.
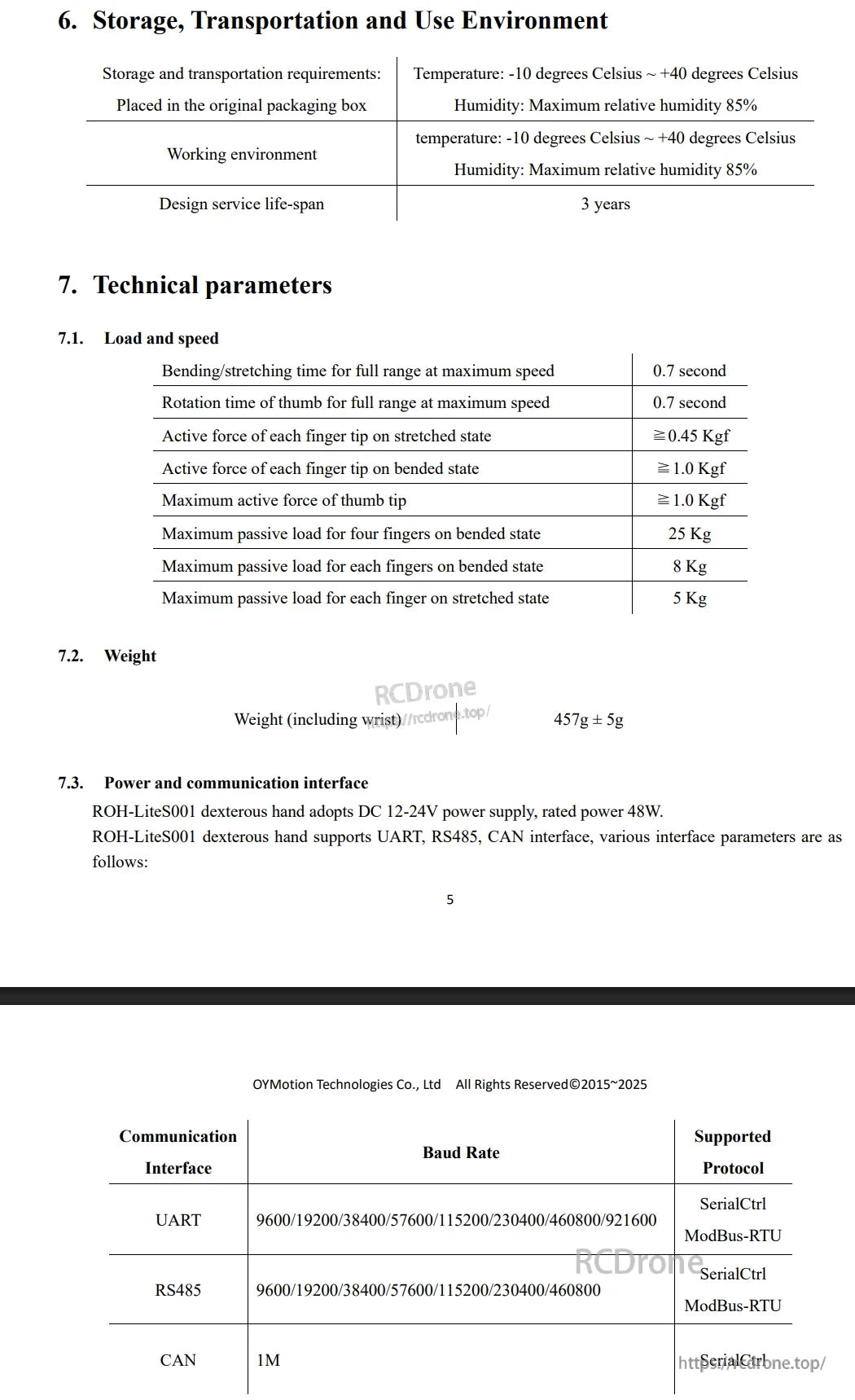
ROH-LiteS001 다재다능한 손은 -10°C에서 +40°C, 최대 85% 습도에서 작동합니다. 무게: 457g ±5g. UART, RS485, CAN 인터페이스를 지원합니다. 설계 수명: 3년. DC 12-24V, 48W 정격으로 전원 공급.
ROHAND 다재다능한 손 모델 ROH-LiteS001, 매뉴얼, 인증서, 보증서가 포장 목록에 포함되어 있습니다.





