







PIXHAWK2.4.8 비행 제어 탄소 섬유 450 프레임 키트-Ardupilot 100MW 무선 원격 측정 Quadcopter BLHELI 20A 2212 모터 ESC
PIXHAWK2.4.8 비행 제어 탄소 섬유 450 프레임 키트-Ardupilot 100MW 무선 원격 측정 Quadcopter BLHELI 20A 2212 모터 ESC
RCDrone
픽업 사용 가능 여부를 로드할 수 없습니다.
PIXHAWK2.4.8 비행 제어 탄소 섬유 450 프레임 키트 사양
용도: 차량 및 원격 조종 장난감
권장 연령: 12+y,14+y,6-12y
원산지: 중국 본토
재질: 탄소섬유
브랜드 이름: rctosky
Pixhawk 2.4.8은 최신 공식 ardupilot 펌웨어 및 PX4 펌웨어를 지원합니다.
1. 고급 32비트 ARM CortexM4 고성능 프로세서(2MB 플래시)는 NuttX RTOS 실시간 운영 체제를 실행할 수 있습니다.
2. 14 PWM / 서보 출력;
3. 버스 인터페이스(UART, I2C, SPI, CAN);
4. 통합 백업 전원 및 백업 컨트롤러에 오류가 발생하면 기본 컨트롤러가 백업 제어로 장애 조치되어 안전합니다.
5. 자동 및 수동 모드 제공
6. 중복 전원 입력 및 장애 조치 제공;
7. 다색 LED 조명;
8. 다중음 부저 인터페이스 제공
9. 마이크로 SD 기록 비행 데이터;
사양:
인터페이스
하드웨어 흐름 제어 기능이 있는 1.5 고전압 호환 UART 1, 2
2. 2 수
3.Spektrum DSM / DSM2 / DSM-X 위성 수신기 호환 입력
4.Futaba SBUS 호환 입력 및 출력
5.PPM 신호 입력
6.RSSI(PWM 또는 전압) 입력
7.I2C
8.SPI
9.3.3 및 6.6VADC 입력
10. 외부 마이크로 USB 인터페이스
단순 배열:
F450+4 PCS BLHELI 30A +4 쌍 1045 프로펠러 +4 PCS 2212 920KV 모터
간단한 패키지:
F450+4 PCS BLHELI 30A +4 쌍 1045 프로펠러 +4 PCS 2212 920KV 모터
표준 패키지:
F450+4 PCS BLHELI 30A +4 쌍 1045 프로펠러 +4 PCS 2212 920KV 모터
PIXHAWK 2.4.8(흰색 또는 검정색 쉘)+ 4G TF 카드 + 안전 버튼 + 버저 + PPM 인코더 + I2C 확장 보드+ 3라인(4핀 1.25 ,6핀 1.25 ,3핀 2.5.4)
높은 패키지:
F450+4 PCS BLHELI 30A +4 쌍 1045 프로펠러 +4 PCS 2212 920KV 모터
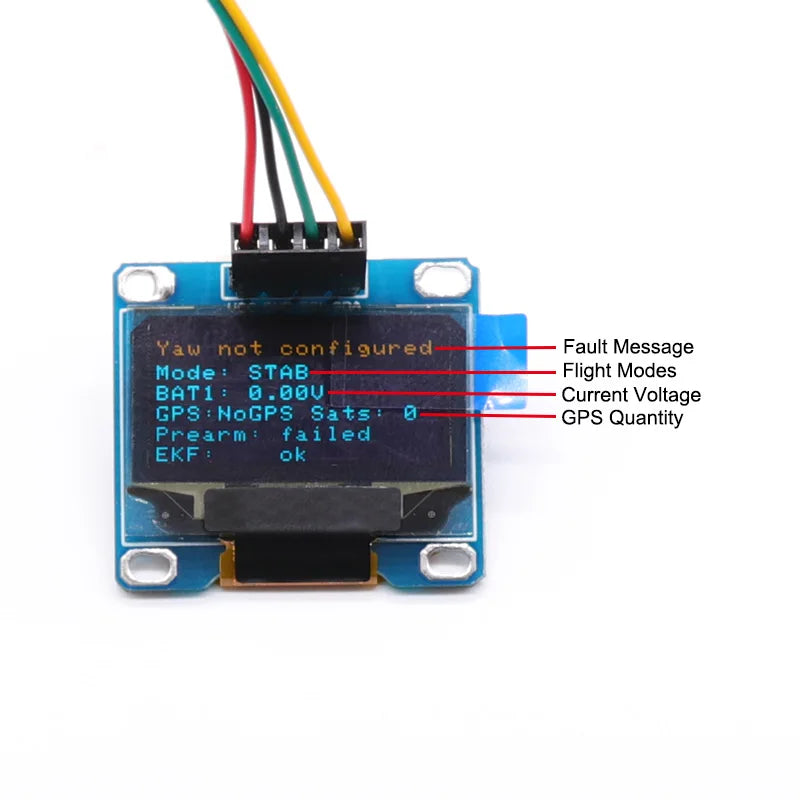
PIXHAWK 2.4.8(흰색 또는 검정색 쉘)+ 4G TF 카드 + 안전 버튼 + 부저 + PPM 인코더 + I2C 확장 보드+ RGB Led + OLED 스크린+ 3라인(4핀 1.25 ,6핀 1.25 ,3핀 2.5.4)
433MHZ 100MW A :
F450+4 PCS BLHELI 30A +4 쌍 1045 프로펠러 +4 PCS 2212 920K 뷔 모터
PIXHAWK 2.4.8+ 4G TF 카드 + 안전 버튼 + 버저 + PPM 인코더 + I2C 확장 보드+ 3라인(4핀 1.25 ,6핀 1.25 ,3핀 2.5.4) + M8N GPS+ GPS 홀더+ 3DR 전원 모듈+ 충격 흡수 장치+433MHZ 100MW 무선 원격 측정
433MHZ 500MW B:
F450+4개 BLHELI 30A +4 쌍 1045 프로펠러 +4개 2212 920K 뷔 모터
PIXHAWK 2.4.8(흰색 또는 검정색 쉘)+ 4G TF 카드 + 안전 버튼 + 부저 + PPM 인코더 + I2C 확장 보드+ RGB LED + OLED 스크린+ 3라인(4핀 1.25 ,6핀 1.25 ,3핀 2.5.4 ) + M8N GPS+ GPS 홀더+ 3DR 전원 모듈+충격 흡수 장치+433MHZ 500MW 무선 원격 측정
433MHZ 1000MW C:
F450+4개 BLHELI 30A +4 쌍 1045 프로펠러 +4개 2212 920K 뷔 모터
PIXHAWK 2.4.8(흰색 또는 검정색 쉘)+ 4G TF 카드 + 안전 버튼 + 버저 + PPM 인코더 + I2C 확장 보드+ RGB LED + OLED 화면+ 3라인(4핀 1.25 ,6핀 1.25 ,3핀 2.5.4 ) + M8N GPS+ GPS 홀더+ 3DR 전원 모듈+충격 흡수 장치+433MHZ 1000MW 무선 원격 측정
915MHZ 100MW A:F450+4 PCS BLHELI 30A +4 쌍 1045 프로펠러 +4 PCS 2212 920KV 모터
PIXHAWK 2.4.8+ 4G TF 카드 + 안전 버튼 + 부저 + PPM 인코더 + I2C 확장 보드+ 3라인(4핀 1.25 ,6핀 1.25 ,3핀 2.5.4) + M8N GPS+ GPS 홀더+ 3DR 전원 모듈+ 충격 흡수 장치 +915MHZ 100MW 무선 원격 측정
915MHZ 500MW B:
F450+4개 BLHELI 30A +4 쌍 1045 프로펠러 +4개 2212 920K 뷔 모터
PIXHAWK 2.4.8(흰색 또는 검정색 쉘)+ 4G TF 카드 + 안전 버튼 + 버저 + PPM 인코더 + I2C 확장 보드+ RGB LED + OLED 화면+ 3라인(4핀 1.25 ,6핀 1.25 ,3핀 2.5.4 ) + M8N GPS+ GPS 홀더+ 3DR 전원 모듈+충격 흡수 장치+915MHZ 500MW 무선 원격 측정
433MHZ 1000MW :
F450+4개 BLHELI 30A +4 쌍 1045개 프로펠러 +4개 2212 920K 뷔 모터
PIXHAWK 2.4.8(흰색 또는 검정색 쉘)+ 4G TF 카드 + 안전 버튼 + 버저 + PPM 인코더 + I2C 확장 보드+ RGB LED + OLED 화면+ 3라인(4핀 1.25 ,6핀 1.25 ,3핀 2.5.4 ) + M8N GPS+ GPS 홀더+ 3DR 전원 모듈+충격 흡수 장치+433MHZ V5 1000MW 무선 원격 측정
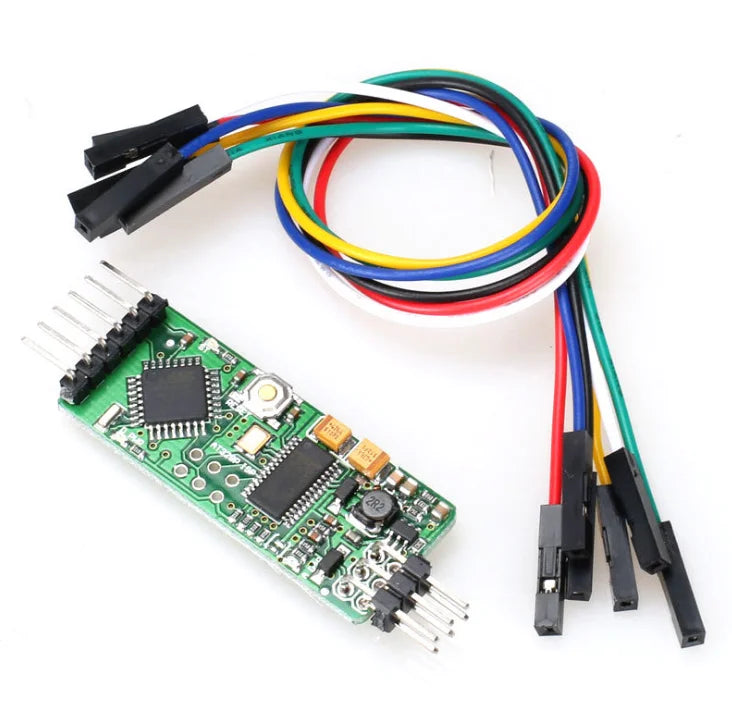
433MHZV5 1000MW OSD:
F450+4개 BLHELI 30A +4 쌍 1045 프로펠러 +4개 2212 920K 뷔 모터
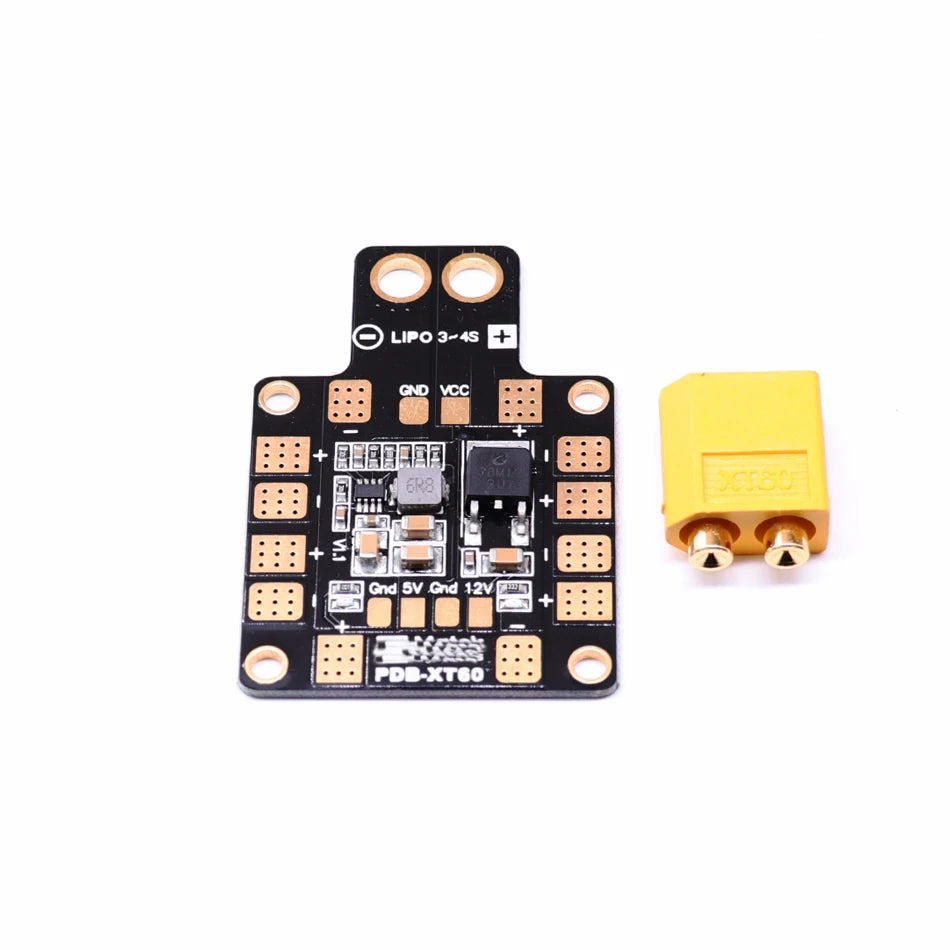
PIXHAWK 2.4.8(흰색 또는 검정색 쉘)+ 4G TF 카드 + 안전 버튼 + 부저 + PPM 인코더 + I2C 확장 보드+ RGB LED + OLED 스크린+ 3라인(4핀 1.25 ,6핀 1.25 ,3핀 2.5.4) + M8N GPS+ GPS 홀더+ 3DR 전원 모듈+충격 흡수 장치+433MHZ V5 1000MW 무선 원격 측정+미니 OSD +PDB
최상위 패키지:



A.기능
A1: 정품 전자 부품을 사용하여 고품질을 보장하고 ESC의 현재 내구성 능력을 강화합니다.
A2: BLHeli 펌웨어 기반으로 뛰어난 선형성과 훨씬 빠른 스로틀 응답으로 고성능에 최적화되었습니다.
A3: 멀티로터용으로 특별히 설계되었으며 고정익 항공기 및 헬리콥터와 호환됩니다.
A4: 저전압 차단 보호/과열 보호/스로틀 신호 손실 보호를 포함한 다중 보호 기능.
A5: 스로틀 범위는 구성 가능하며 모든 수신기와 완벽하게 호환되어 부드럽고 선형적이며 정확한 스로틀 응답을 제공합니다. A6: 기본 설정을 포함하여 모든 매개변수는 송신기를 사용하여 프로그래밍할 수 있습니다.
ㄴ. 제품 사양
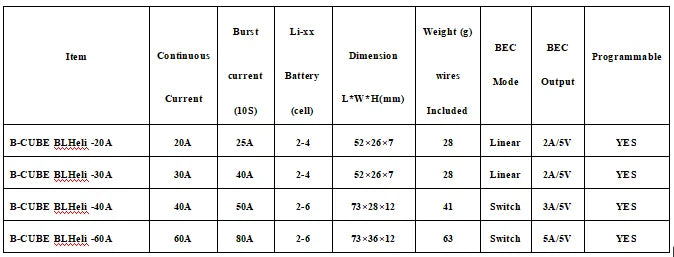
BEC BEC Treni Cobnbuou: DileD D 프로그래밍 가능한 전류 Batfert Vir e: 모드 출력 전류 LtutHoinil (105) 차단된 B-CCBE BLHeli -20A 026 27 LineAr 4T"

프로펠러 1045개

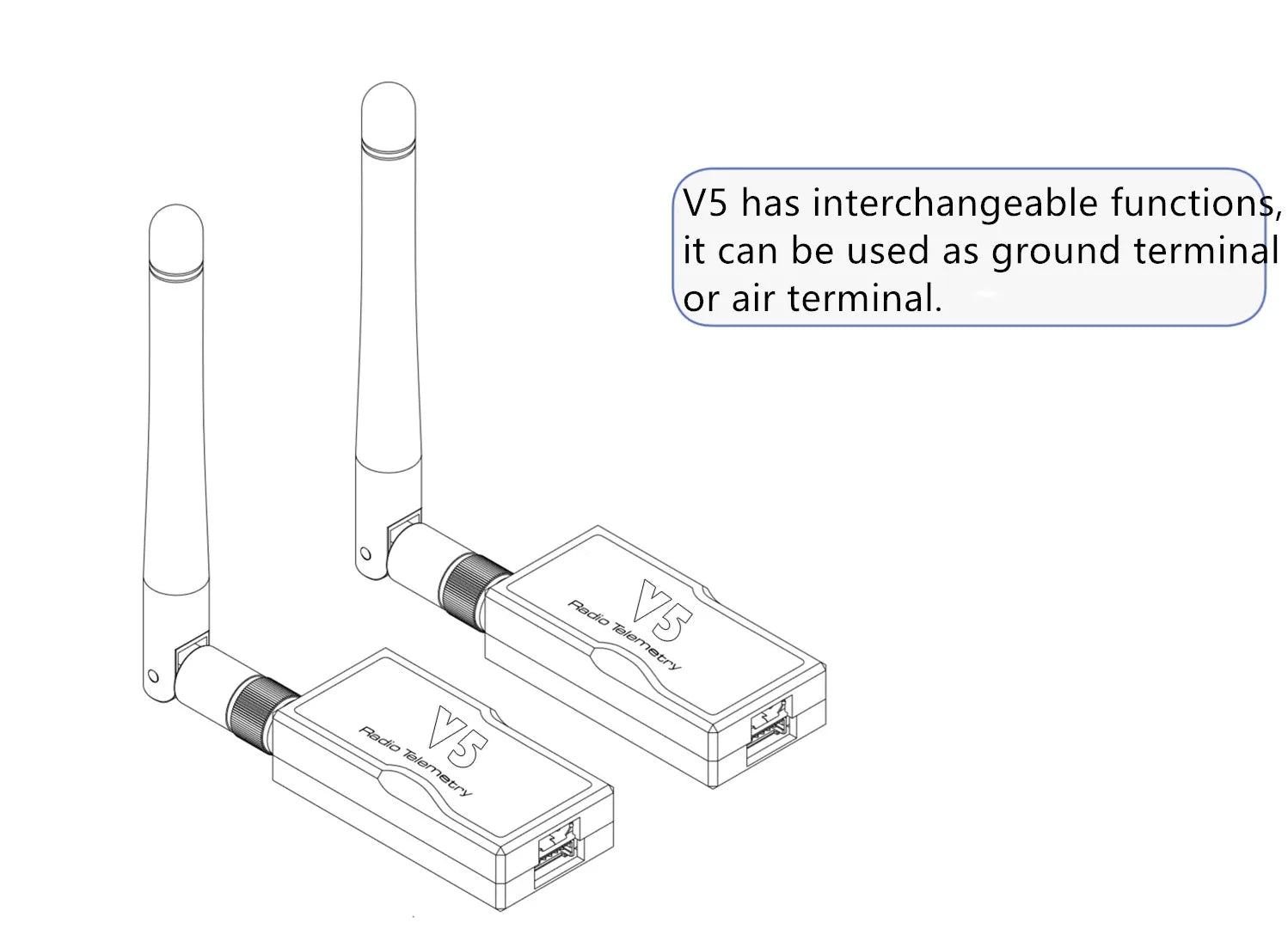
V5 모듈은 상호 교환 가능한 기능을 갖추고 있어 지상국 또는 공중 터미널 역할을 할 수 있습니다.
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_286b8762-ba49-44db-a8cd-b38c172bd03c.webp?v=1714895788)


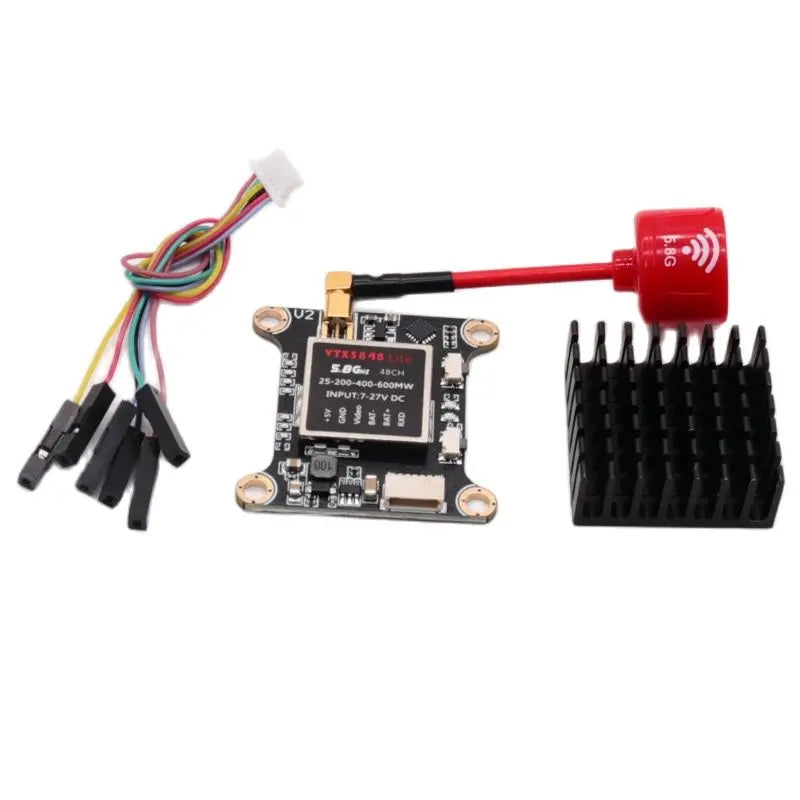
VTX5848은 비디오 송신기이며, 25MW~600MW, 48채널을 지원합니다(방열판 및 3DB안테나 포함)
FPV 카메라

이 문서에서는 ESC, 모터 및 프로펠러를 자동 조종 장치에 연결하는 방법을 설명합니다.Pixhawk를 예로 사용했지만 다른 자동 조종 장치도 비슷한 방식으로 연결됩니다.
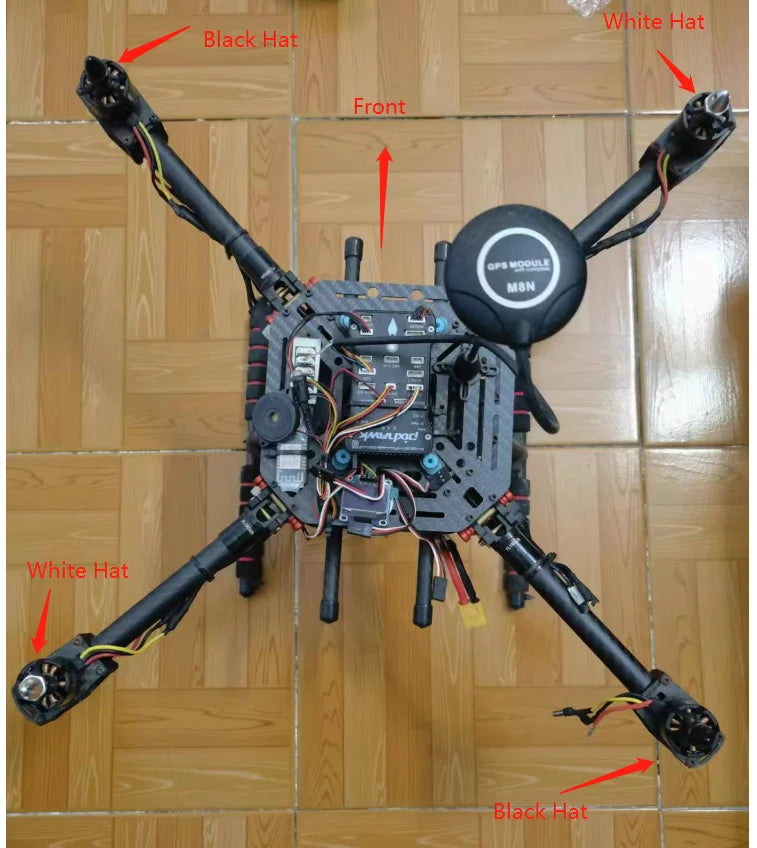
각 ESC의 전원(+), 접지(-) 및 신호선을 모터 번호별로 자동 조종 장치의 기본 출력 핀에 연결합니다. 아래에서 프레임 유형을 찾아 모터 할당 순서를 결정하세요.

Pixhawk 출력 핀(번호 지정). 처음 4개 핀은 쿼드프레임 연결을 위해 색상으로 구분되어 있습니다
모터 주문 다이어그램
아래 다이어그램은 각 프레임 유형에 대한 모터 순서를 보여줍니다. 숫자는 각 모터/프로펠러에 연결되어야 하는 자동 조종 장치의 출력 핀을 나타냅니다. 프로펠러 방향은 녹색(시계 방향, CW) 또는 파란색(시계 반대 방향, CCW)으로 표시됩니다

모터 순서 다이어그램의 범례
쿼드콥터

시계 방향 및 반시계 방향 프로펠러 인식

위 다이어그램은 두 가지 유형의 프로펠러, 즉 시계 방향(푸셔라고 함)과 시계 반대 방향(풀러라고 함)을 보여줍니다. 아래 그림과 같이 모양으로 올바른 프로펠러 유형을 인식하는 것이 가장 신뢰할 수 있습니다. 두꺼운 모서리는 회전 방향으로 움직이는 앞쪽 모서리입니다. 뒤쪽 가장자리는 더 과격한 부채꼴 모양이며 일반적으로 더 얇습니다.
모터를 어떻게 설치합니까?
Related Collections






















