




ROBOTERA XHAND 1 로봇 핸드 - 12자유도, 270° 촉각 핑거팁, 80N 그립, 25kg 리프트, EtherCAT/RS485, ROS 지원
ROBOTERA XHAND 1 로봇 핸드 - 12자유도, 270° 촉각 핑거팁, 80N 그립, 25kg 리프트, EtherCAT/RS485, ROS 지원
ROBOTERA
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
ROBOTERA XHAND 1은 12개의 능동적인 자유도(DoF)를 가진 다섯 손가락 로봇 손으로, 완전 직접 구동 관절 모듈을 갖추고 있습니다. 이 손은 인간 손 크기(191 mm x 94 mm x 47 mm)로 설계되었으며, 고해상도 촉각 감지, 강력한 그립 강도, 로봇 연구 및 통합을 위한 개발자 친화적인 인터페이스를 통해 섬세한 조작을 가능하게 합니다.
주요 특징
- 통합 기어 구동, 힘 제어 관절 모듈(엄지에 3개; 나머지 네 손가락에 9개)을 갖춘 완전 직접 구동 아키텍처.
- 12개의 완전 능동적인 자유도; 복잡한 손 안 조작을 위한 인덱스 손가락의 측면 스윙 +/-15°.
- 높은 그립 성능: 손끝 힘 15N; 최대 그립 강도 80N; 최대 잡는 무게는 25 Kg(손바닥 위) 및 16 Kg(손바닥 왼쪽)까지 가능합니다.
- 초당 2Hz 이상의 개폐 반복을 지원하는 고속 작동; 초당 최대 10회의 클릭을 보여줍니다(CPS: Clicks Per Second).
- 270° 손끝 촉각 범위와 다섯 개의 3차원 촉각 배열 센서; 손끝당 전체 손 해상도 12x10 x 5.
- 접선 힘(X 및 Y)을 포함한 3차원 힘 감지; 손끝 반복 위치 정확도 +/-0.20 mm.
- 감쇠가 있는 백 드라이버 <= 0.1 Nm; 순환 전류 힘 제어 및 힘-위치 제어를 통한 유연한 상호작용.
- 개발자 친화적인 연결성: EtherCAT 및 RS485 (USB); ROS1/ROS2, Ubuntu (Linux), x86 및 ARM 아키텍처, TwinCAT 및 일반 로봇 팔(xARM, Realman, UR 포함)과 호환 가능.
- 내구성은 1,000,000 무부하 그립 사이클로 평가됨; 작동 온도 -20°C ~ 60°C.
문의, 통합 지원 또는 대량 구매에 대해서는 [email protected] or에 연락하거나 https://rcdrone.top/를 방문하십시오.
사양
| 매개변수 | 값 |
|---|---|
| 무게 | 1100 g |
| 치수 (L x W x T) | 191 mm x 94 mm x 47 mm (성인의 손 크기) |
| 능동 DoF (총계) | 12 |
| 수동 DOF (총계) | 0 |
| DoF 할당 | 엄지 x 3; 검지 x 3; 중지 x 2; 약지 x 2; 새끼손가락 x 2 |
| 엄지 작동/전송 | 3 기어 구동 힘 제어 관절 모듈 |
| 네 손가락 작동/전송 | 9 기어 구동 힘 제어 관절 모듈 |
| 손끝 구성 | 둥글거나 둥근 손끝 |
| 측면 스윙 | -15°~+15° (검지) |
| 손끝 반복 위치 정확도 | +/− 0.20 mm |
| 제어 모드 | 위치 제어 (저 감쇠/고 감쇠), 전류 루프 힘 제어, 힘-위치 제어 |
| 손끝 힘 | 15N |
| 최대 그립 강도 (전체 손) | 80N |
| 최대 잡기 무게 (손바닥 왼쪽) | 16 Kg |
| 최대 잡기 무게 (손바닥 위) | 25 Kg |
| 엄지손가락 가장 먼 반대 | 새끼손가락 |
| 열기/닫기 반복 속도 | >2Hz |
| 백드라이브 감쇠 (백드라이브 가능) | <= 0.1 Nm |
| 촉각 범위 | 270° 다섯 손가락 끝 감싸기 |
| 촉각 센서 수 | 다섯 손가락 끝에 있는 270° 3차원 감싸기 촉각 배열 센서 다섯 개 |
| 촉각 해상도 (전체 손) | 12x10 (각 손가락 끝의 270° 감싸기) x 5 |
| 촉각 감지 치수 | 3차원 힘 감지 (접선 힘 X 및 Y 포함) |
| 전체 손 제어 주파수 | 83Hz |
| 통신 속도 | EtherCAT: 100MHz; RS485: 3MHz |
| 감지 매개변수 | 손가락 끝: 120 3차원 프로파일링 배열 힘; 관절: 위치, 속도, 온도, 전류 (토크) |
| 제어 매개변수 | 관절 위치; 관절 토크; 관절 강성 계수; 관절 감쇠 계수 |
| 무부하 그립 사이클 | 1,000,000 사이클 |
| 작동 온도 범위 | -20°C ~ 60°C |
| 작동 전압 | 24V ~ 72V |
| 정적 전류 | 0.15A @48V, 7W |
| 최대 전류 | 2.5A @48V, 120W |
| 통신 인터페이스 | RS485 (USB), EtherCAT |
응용 프로그램
- 원격 조작: MR 및 장갑 원격 조작 지원; Vision Pro 원격 조작; Manus Gloves; Pico/Meta Quest.
- 로봇 팔 및 휴머노이드 통합: xARM, Realman, UR 및 기타 로봇 팔과 호환.
- 연구 및 시뮬레이션: 정밀 URDF, 촉각 감지 시뮬레이션; Isaac Gym 및 Mujoco를 통한 강화 학습에 적합.
- 인간-기계 상호작용 및 순응력 제어를 통한 인간 도구의 작동.
매뉴얼
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
상세정보

ROBOTERA XHAND1 로봇 손은 완전 직접 구동 방식으로 진정한 자유와 고급 손재주를 제공합니다.

ROBOTERA의 XHAND1: 12개의 자유도를 가진 인간형 다섯 손가락 손, 각 손가락 끝에 270° 촉각 센서, 80N의 그립 힘, 25kg의 하중 용량. 복잡한 작업 및 도구 취급을 위해 설계되었습니다.

XHAND 1: 관절마다 직접 구동 모듈이 있는 첫 번째 손재주 있는 손. 고출력 무선 모터, 저감쇠 감속기, 정밀 인코더 및 고급 로봇 조작을 위한 자체 개발 통합 관절 모듈을 특징으로 합니다.
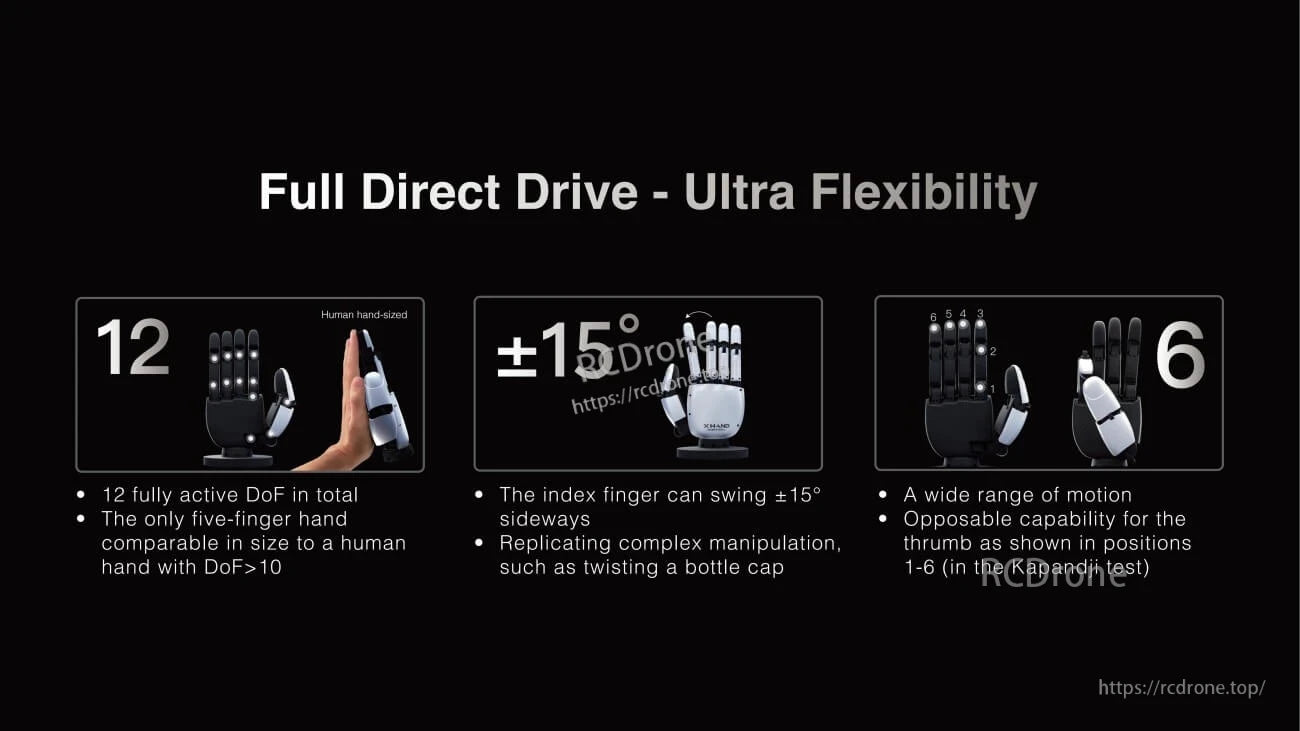
ROBOTERA XHAND 1은 12개의 활성 자유도를 가진 초유연한 인간 크기의 로봇 손입니다. 검지 손가락은 복잡한 작업을 위해 ±15° 옆으로 흔들리며, 엄지손가락은 다재다능한 조작을 위해 여섯 가지 대칭 위치를 제공합니다.

ROBOTERA XHAND 1: 25kg 하중, 80N 그립 강도, 완전 직접 구동, 유사한 링크/건타 드라이브 솔루션을 초월합니다.

완전 직접 구동 로봇 손은 기어 구동 속도로 10 CPS를 달성하며, 1 Nm 이상의 토크로 링크 및 건타 시스템을 초월하여 우수한 게임 성능을 제공합니다.

ROBOTERA XHAND 1은 270° 손끝 센서를 갖추고 있으며, >100 포인트와 0.05 N 정확도로 3D 힘, 촉각 및 온도 감지를 제공하여 우수한 그립 성능을 보장합니다.
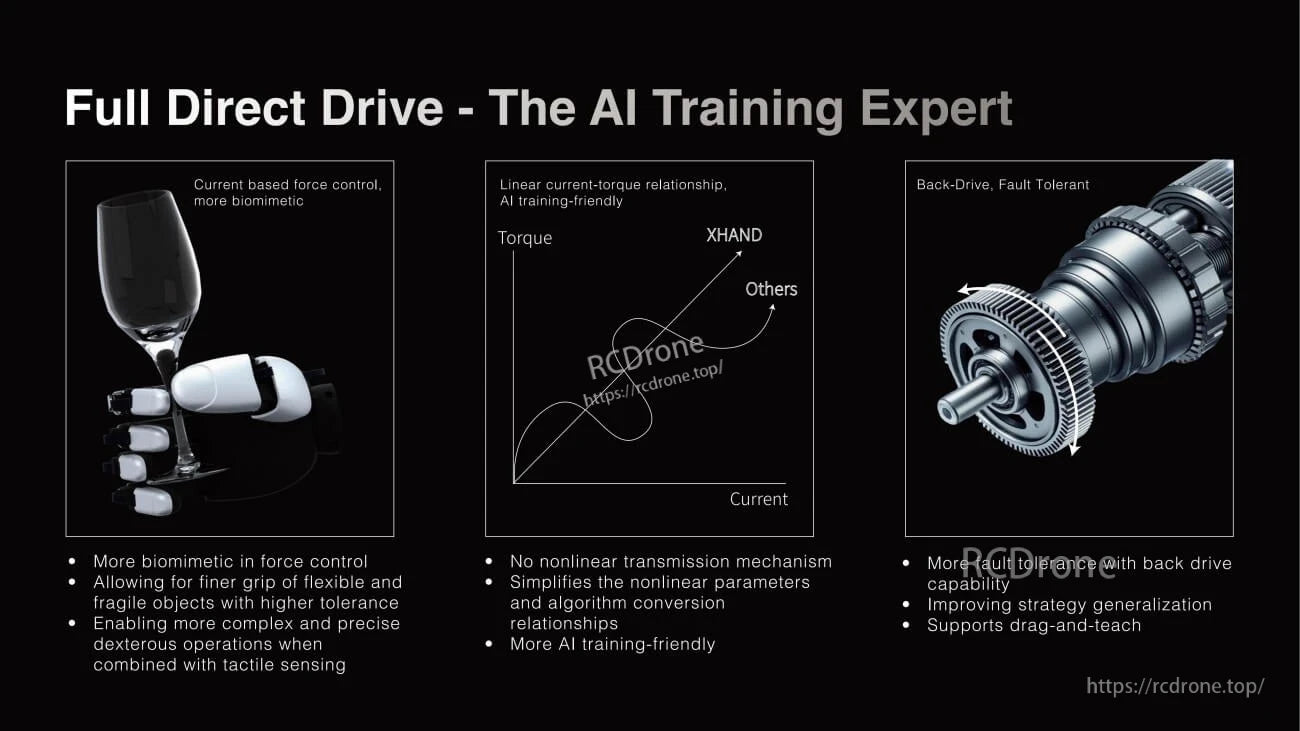
ROBOTERA XHAND 1은 생체 모방 힘 제어, AI 훈련을 위한 선형 토크-전류 응답 및 백 드라이브 결함 허용을 제공하여 정밀한 핸들링, 간소화된 알고리즘, 드래그 및 가르치기 지원, 향상된 전략 일반화를 가능하게 합니다.
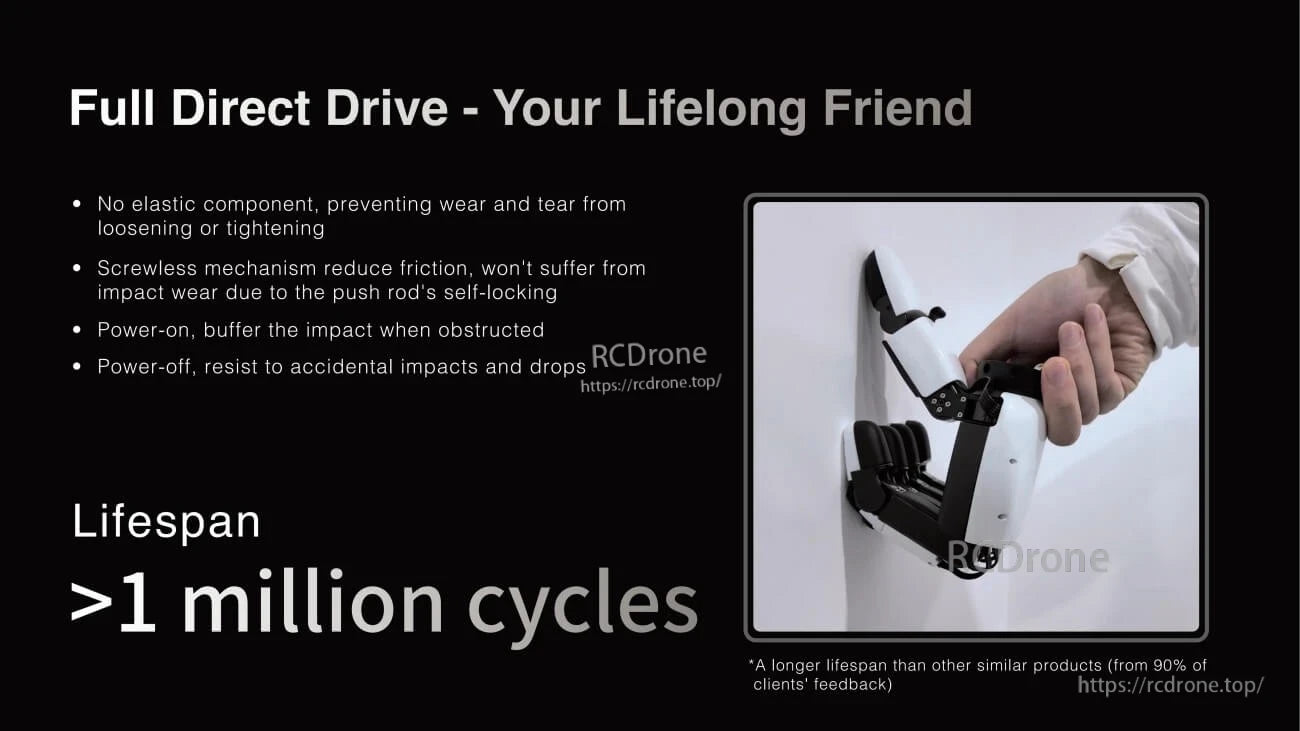
풀 다이렉트 드라이브 로봇 손은 탄성 부품이나 나사가 없고, 전원이 켜졌을 때 충격 완화 기능, 전원이 꺼졌을 때 낙하 저항 기능을 제공하며, 수명은 백만 사이클을 초과하여 고객 피드백에 따라 유사 제품보다 뛰어난 성능을 발휘합니다.

ROBOTERA XHAND 1은 MR 및 장갑 원격 조작을 지원하며, x64/ARM에서 ROS1/ROS2 및 Ubuntu와 호환됩니다. xARM, Realman, UR 로봇 팔과의 통합을 위한 EtherCAT/TwinCAT/RS485 기능을 갖추고 있습니다. 정밀한 URDF 모델링 및 촉각 감지 시뮬레이션을 제공합니다. 크로스 플랫폼 유연성과 고급 제어 프로토콜을 갖춘 개발자 친화적인 로봇 응용 프로그램을 위해 설계되었습니다.
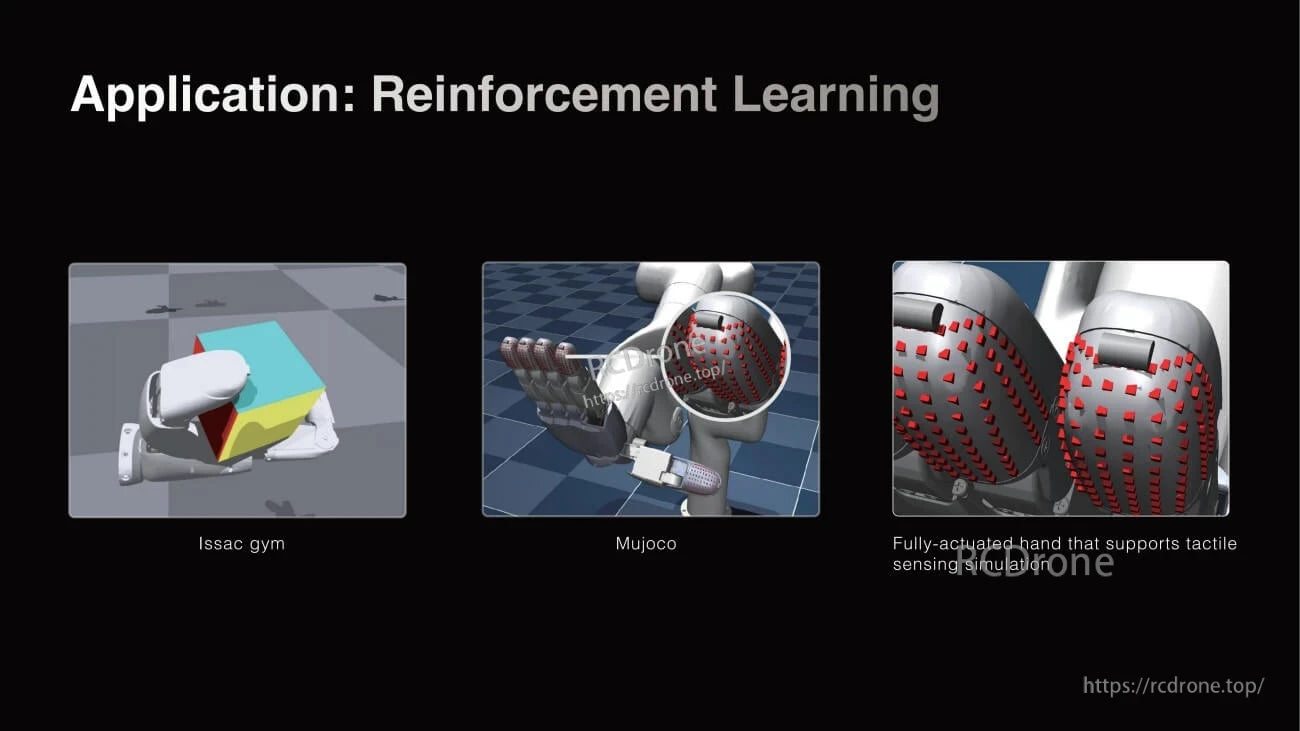
강화 학습 응용 프로그램: Issac gym, Mujoco, 및 고급 로봇 제어 및 훈련 환경을 위한 촉각 감지 시뮬레이션이 포함된 완전 구동 손.
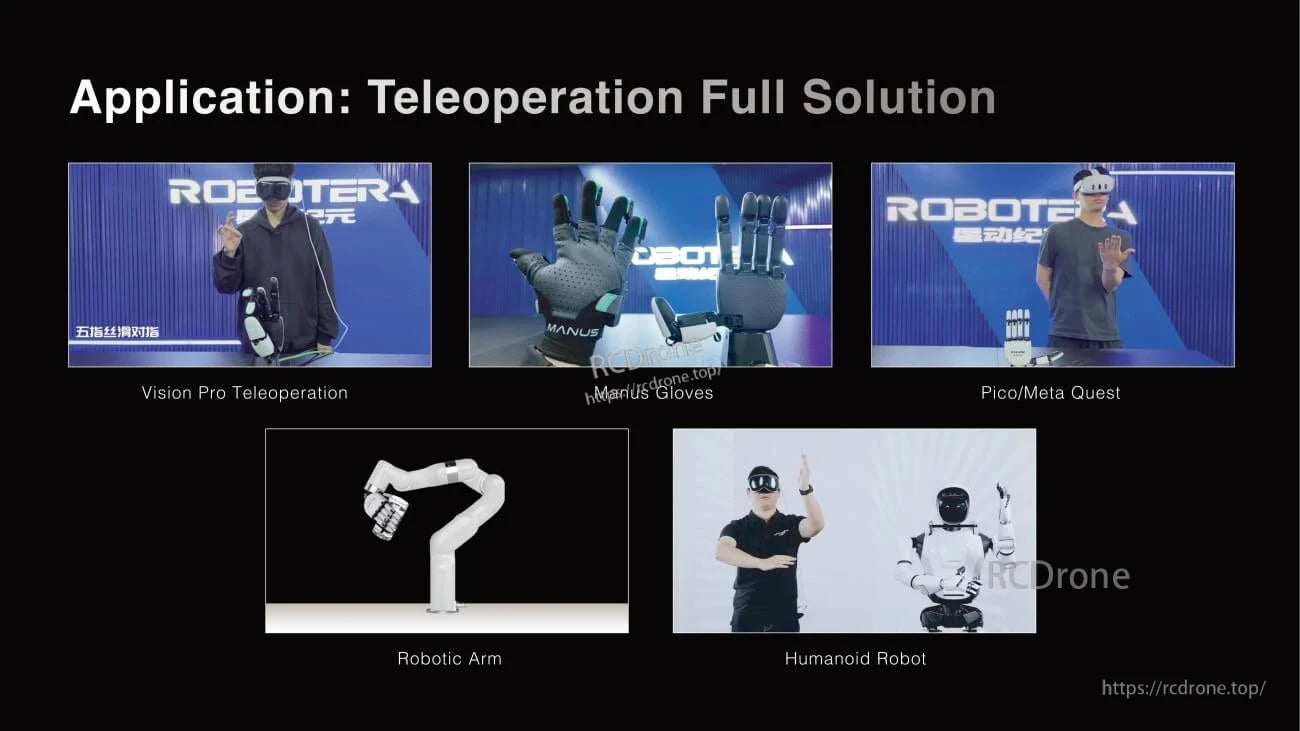
비전 프로, 매너스 글러브, 피코/메타 퀘스트, 로봇 팔 및 휴머노이드 로봇을 특징으로 하는 원격 조정용 완전 솔루션.
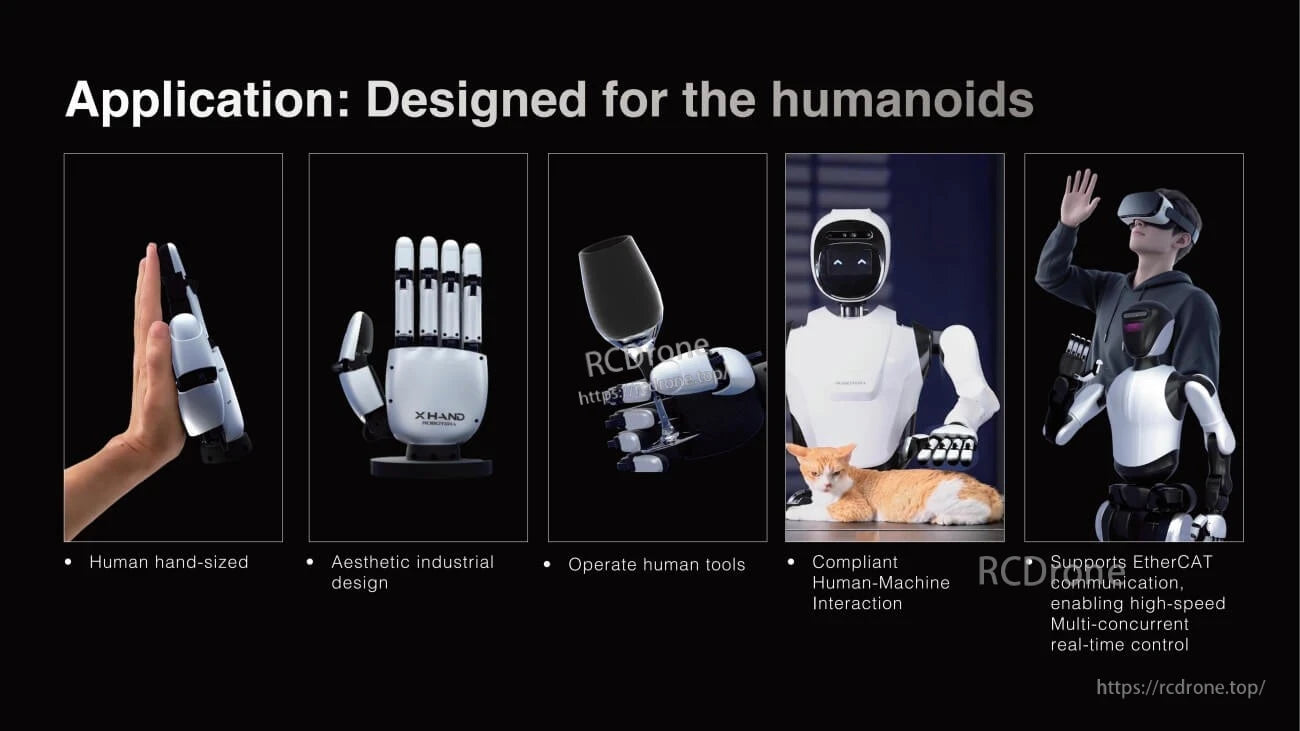
미적 디자인의 인간 크기 로봇 손, 도구 작동, 순응형 상호작용 가능, 실시간 제어를 위한 EtherCAT 지원.
Related Collections




