









Jetson Nano/Orin SUPER/라즈베리 파이 5용 음성 상호작용 ROSMASTER R2 ROS2 아커만 로봇카 (1.8m/s)
Jetson Nano/Orin SUPER/라즈베리 파이 5용 음성 상호작용 ROSMASTER R2 ROS2 아커만 로봇카 (1.8m/s)
Yahboom
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
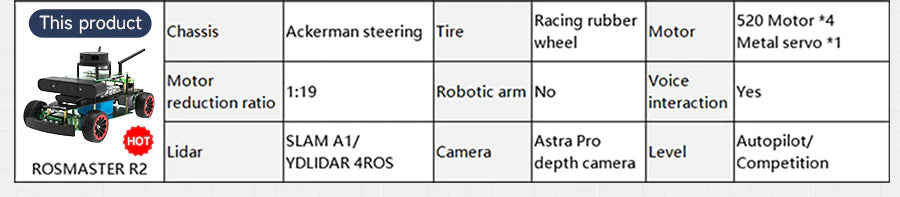
ROSMASTER R2는 Ackermann 조향 구조와 AI 음성 상호작용 모듈을 갖춘 ROS2 로봇 자동차입니다. ROS2 시스템(ROS1/ROS2 시스템 이미지도 지원)을 기반으로 개발되었으며, Jetson NANO (B01/SUB), Jetson Orin NANO SUPER, Jetson Orin NX SUPER, Raspberry Pi 5를 메인 제어 보드로 지원합니다. 최대 속도는 1.8 m/s입니다.
이 플랫폼은 깊이 카메라와 LiDAR를 사용한 SLAM 매핑/내비게이션, 경로 계획, AI 비전 애플리케이션과 같은 ROS 개발 및 학습 워크플로우를 위해 설계되었습니다.
주요 특징
- Ackermann ROS2 로봇 플랫폼: ROS 개발, SLAM 매핑 내비게이션, ROS2 완전 지원, Ackermann 조향 구조, 로봇 음성 상호작용.
- 센서 준비 완료 하드웨어 세트: LiDAR 및 Astra Pro 깊이 카메라를 지원하여 매핑/내비게이션 및 깊이/포인트 클라우드 애플리케이션을 지원합니다.
- AI 비전 & 인식 소프트웨어 주제 (학습 콘텐츠에 제공됨) : YOLO 모델 훈련, MediaPipe 머신 러닝, OpenCV 이미지 처리, ORBSLAM2 매핑, RTAB 3D 실제 장면 매핑, AR 태그, 색상/KCF 추적, 시각 인식/대상 추적.
- 내비게이션 & 매핑 주제 (학습 콘텐츠에 제공됨) : Gmapping, Cartographer, 3D 매핑 비전, RRT 탐색, LiDAR 스캐닝 매핑, 동적 회피.
- 원격 제어 방법: iOS/Android 앱 제어, 무선 핸들 제어, 키보드 제어, ROS 시스템 제어; Jupyter 기반 제어도 지원.
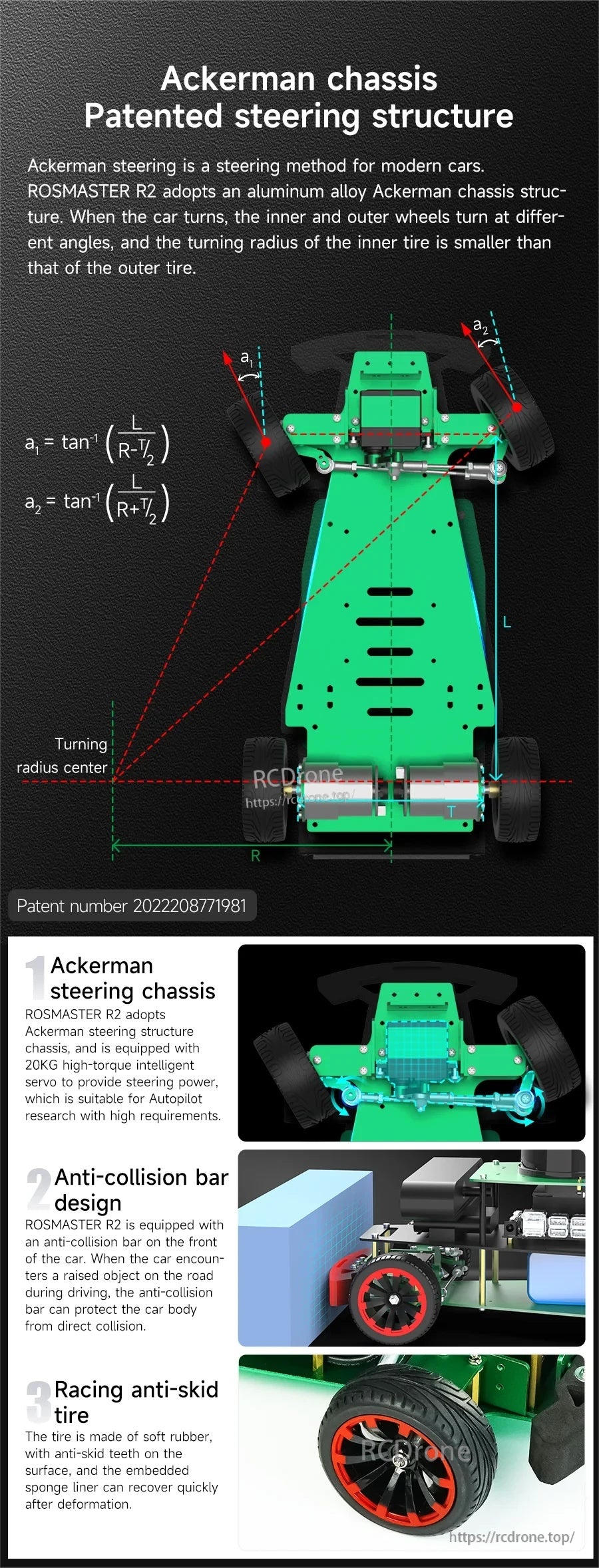
- 섀시 세부사항: 알루미늄 합금 아커먼 섀시; 충돌 방지 바 디자인; 스펀지 라이너 복구가 내장된 레이싱 미끄럼 방지 소프트 고무 타이어.
- 조향 서보: 조향력을 위한 20KG 고토크 지능형 서보 장착.
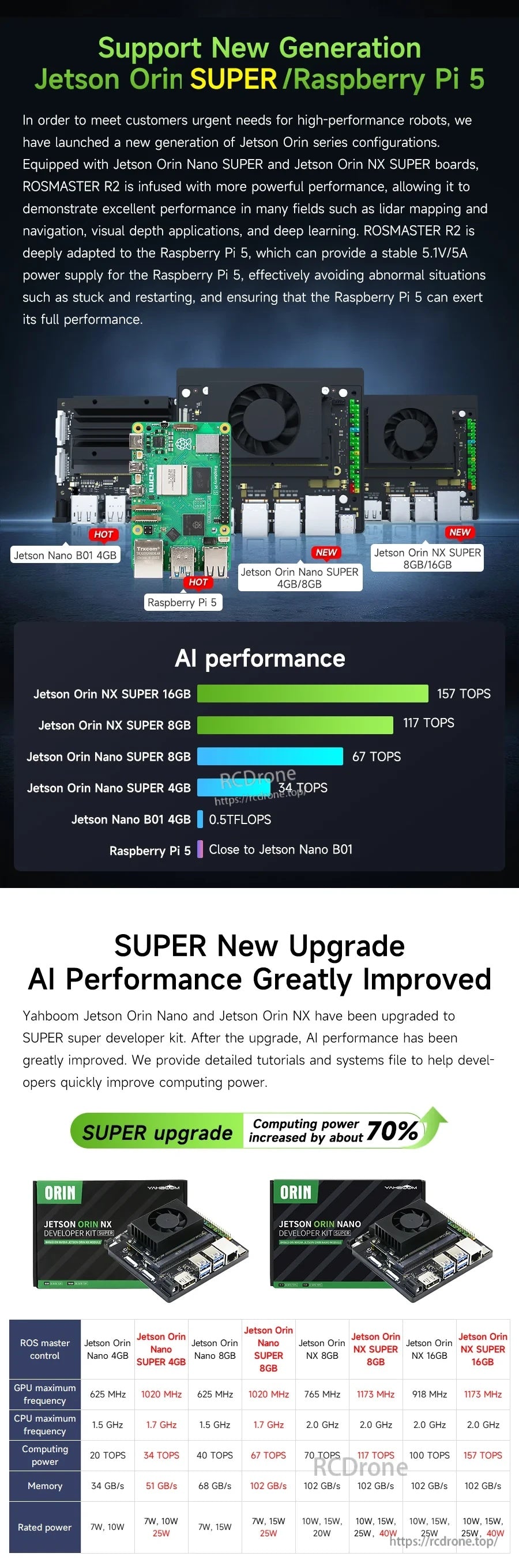
- 차세대 컨트롤러 지원: Jetson Orin SUPER 시리즈 및 Raspberry Pi 5 지원; Raspberry Pi 5 적응에는 안정적인 5.1V/5A 전원 공급 설계가 포함됩니다.
사양
| 제품 | ROSMASTER R2 Ackermann ROS2 로봇 (로봇 자동차) |
| 최대 속도 | 1.8 m/s |
| 조향 구조 | Ackermann 조향 |
| 섀시 | 알루미늄 합금 Ackermann 섀시; 충돌 방지 바 |
| 타이어 | 레이싱 고무 휠; 스펀지 라이너가 내장된 부드러운 고무 미끄럼 방지 타이어 |
| 구동 모터 | 520 모터 *4 |
| 조향 서보 | 메탈 서보 *1; 20KG 고토크 지능형 서보 |
| 모터 감속비 | 1:19 |
| 음성 상호작용 | 예 |
| 카메라 | Astra Pro 깊이 카메라 (버전 비교에서 Astra Pro Plus 깊이 카메라 참조) |
| LiDAR 옵션 | SLAM A1 / YDLIDAR 4ROS |
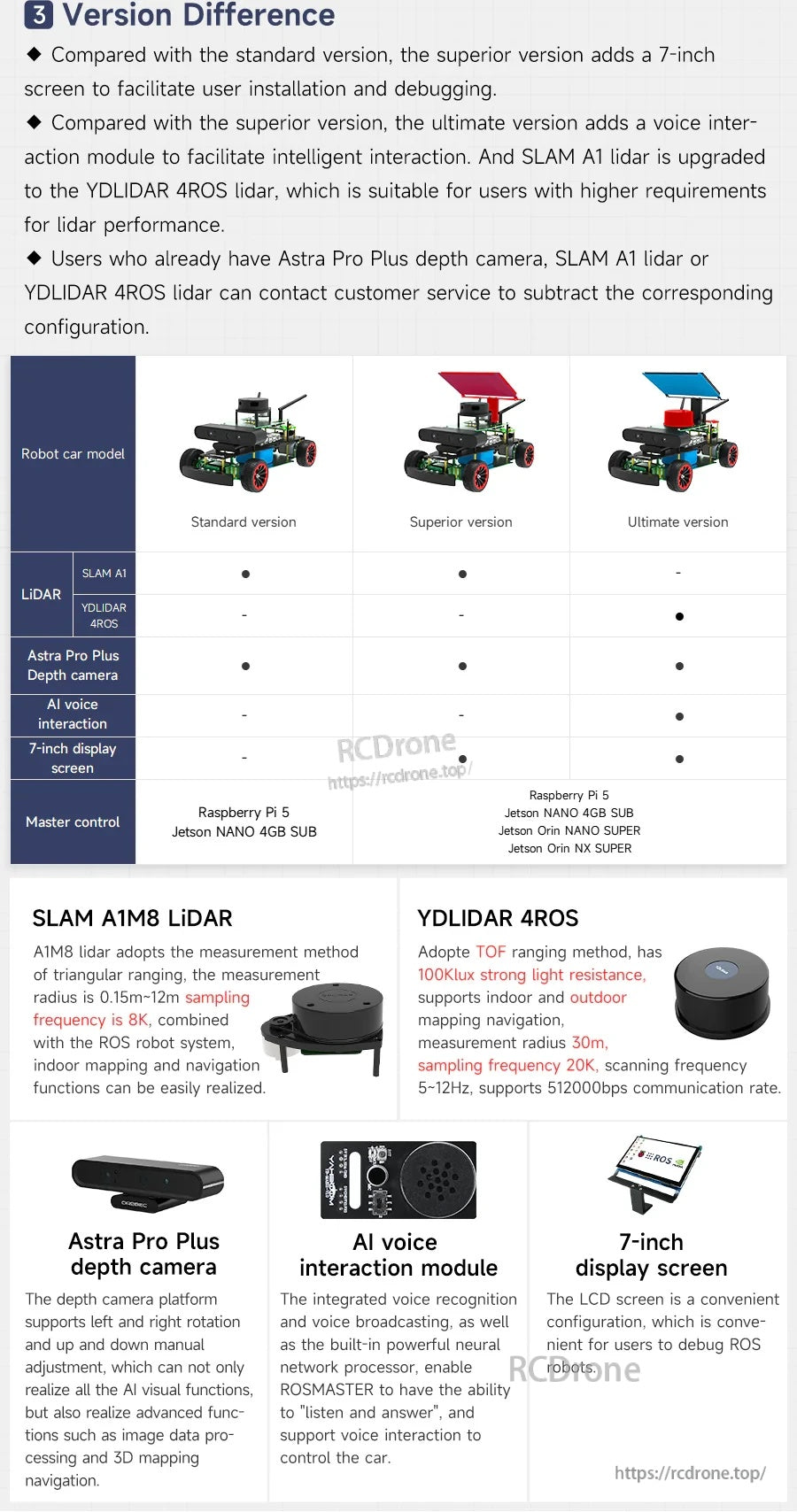
| SLAM A1M8 LiDAR 세부사항 | 삼각 측정; 측정 반경 0.15 m to 12 m; sampling frequency 8K |
| YDLIDAR 4ROS 세부사항 | TOF 거리 측정; 100Klux 강한 빛 저항; 실내/실외 매핑 내비게이션; 측정 반경 30 m; 샘플링 주파수 20K; 스캔 주파수 5 to 12 Hz; 512000 bps 통신 속도 지원 |
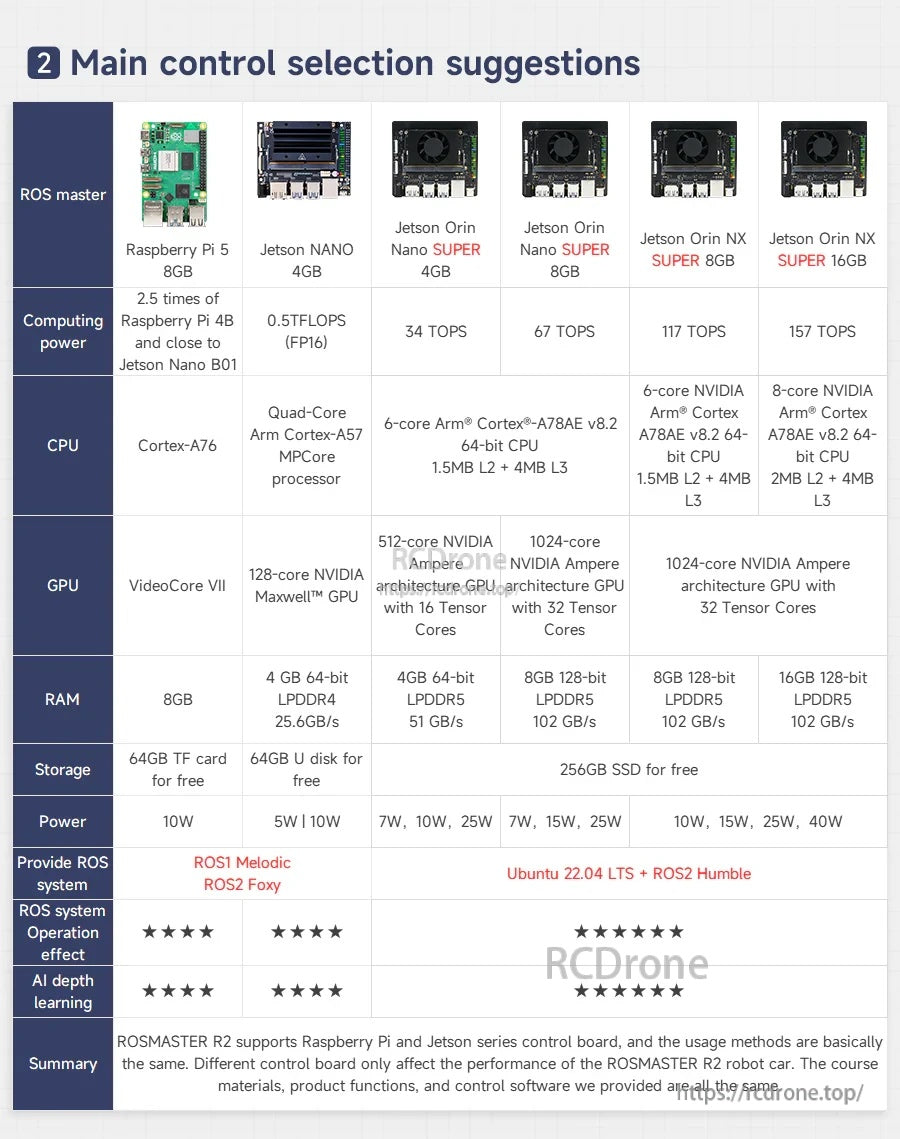
| 지원되는 메인 컨트롤 보드 | Jetson Nano B01 4GB; Jetson NANO 4GB SUB; Jetson Orin Nano SUPER 4GB/8GB; Jetson Orin NX SUPER 8GB/16GB; Raspberry Pi 5 (8GB 참조) |
| 참조 AI 성능 (컨트롤러) | Jetson Orin NX SUPER 16GB: 157 TOPS; Jetson Orin NX SUPER 8GB: 117 TOPS; Jetson Orin Nano SUPER 8GB: 67 TOPS; Jetson Orin Nano SUPER 4GB: 34 TOPS; Jetson Nano B01 4GB: 0.5 TFLOPS; Raspberry Pi 5: Jetson Nano B01에 근접 |
| 제공된 시스템 이미지 (참조) | Raspberry Pi / Jetson Nano: ROS1 Melodic, ROS2 Foxy; Orin 시리즈: Ubuntu 22.04 LTS + ROS2 Humble |
| 특허 (Ackermann 섀시) | 특허 번호 2022208771981 |
버전 옵션
- 표준 버전: SLAM A1 LiDAR; 깊이 카메라; 메인 컨트롤: Raspberry Pi 5 또는 Jetson NANO 4GB SUB.
- 고급 버전: 7인치 디스플레이 화면 추가 (설치/디버깅용); 메인 컨트롤: Raspberry Pi 5, Jetson NANO 4GB SUB, Jetson Orin NANO SUPER, Jetson Orin NX SUPER.
- 최고급 버전: AI 음성 상호작용 모듈 추가; LiDAR를 SLAM A1에서 YDLIDAR 4ROS로 업그레이드; 7인치 디스플레이 화면 포함; 메인 컨트롤: Raspberry Pi 5, Jetson NANO 4GB SUB, Jetson Orin NANO SUPER, Jetson Orin NX SUPER.
응용 프로그램
- ROS/ROS2 학습 및 개발 (로봇 통신, 노드 및 미들웨어 연습)
- SLAM 매핑 및 내비게이션, 경로 계획 및 장애물 회피 학습 프로젝트
- 깊이 카메라 및 LiDAR 포인트 클라우드 처리 및 3D 매핑 주제
- AI 비전 프로젝트 (튜토리얼에 포함된 YOLO/MediaPipe/OpenCV 주제)
- 자율주행 시나리오 학습 주제 (도로 감지, 차선 유지, 자율 주차, 조향 결정)
참고: 자율주행 모델 훈련 참조 사례는 R2L 자동차 모델에 제공되며, R2 자동차 모델은 이러한 사례를 직접 사용할 수 없으며, 카메라 및 지도 장면을 기반으로 모델을 구축하기 위한 개발이 필요합니다.
튜토리얼
튜토리얼 링크 (공식 학습 페이지): http://www.yahboom.net/study/ROSMASTER-R2
구성 안내(버전 선택 및 센서/컨트롤러 조합 포함)를 위해 고객 지원에 문의하십시오 https://rcdrone.top/ 또는 [email protected].
세부사항

ROSMASTER R2는 Ackermann 조향과 ROS2 준비 하드웨어를 결합하여 매핑, 내비게이션 및 AI 비전 프로젝트에 적합합니다.

ROS 개발 워크플로우를 위해 설계된 플랫폼은 SLAM 매핑/내비게이션과 온보드 AI 음성 상호작용을 지원합니다.
작업량에 맞는 메인 컨트롤러를 선택하세요—옵션에는 Jetson Orin SUPER 보드와 Raspberry Pi 5가 포함됩니다.
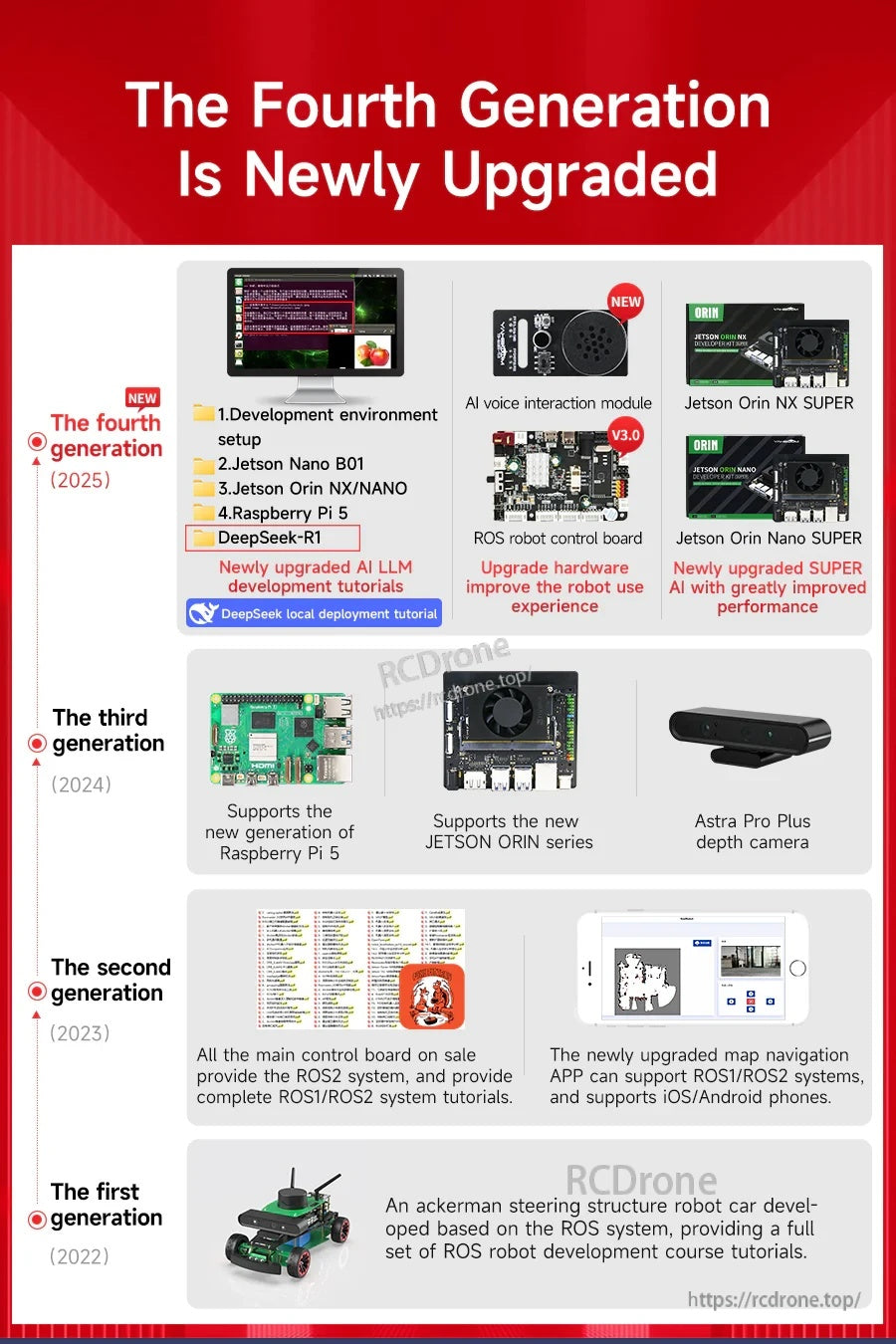
업데이트된 세대는 더 넓은 컨트롤러 지원과 ROS1/ROS2 사용자들을 위한 확장된 학습 콘텐츠를 추가합니다.
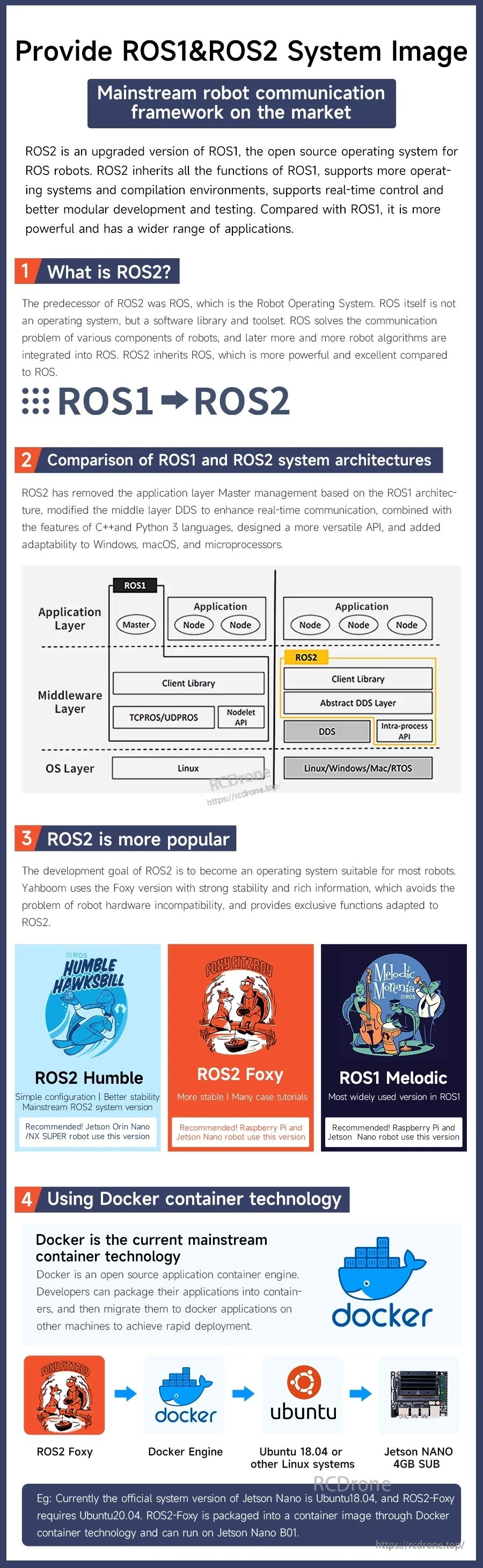
사전 구축된 ROS1/ROS2 이미지와 Docker 기반 배포는 개발 및 교육 실습실의 설정을 간소화하는 데 도움이 됩니다.
Ackermann 조향은 자동차와 같은 주행 및 자율주행 스타일의 내비게이션 실험에 권장됩니다.
핵심 하드웨어에는 Ackermann 섀시, 520 모터, LiDAR 옵션 및 인식 작업을 위한 Astra Pro 깊이 카메라가 포함됩니다.
성능 및 전력 소모는 컨트롤러에 따라 다르며, ROS 작업량에 맞춰 컴퓨팅 요구 사항을 쉽게 조정할 수 있습니다.
다양한 키트 버전은 매핑 및 AI 목표에 따라 센서 및 상호작용 모듈을 추가할 수 있게 해줍니다.
알루미늄 Ackermann 섀시는 안정적인 조향을 위해 설계되었으며, 연구 및 유지보수를 위한 보호 구조 세부 사항이 강조됩니다.
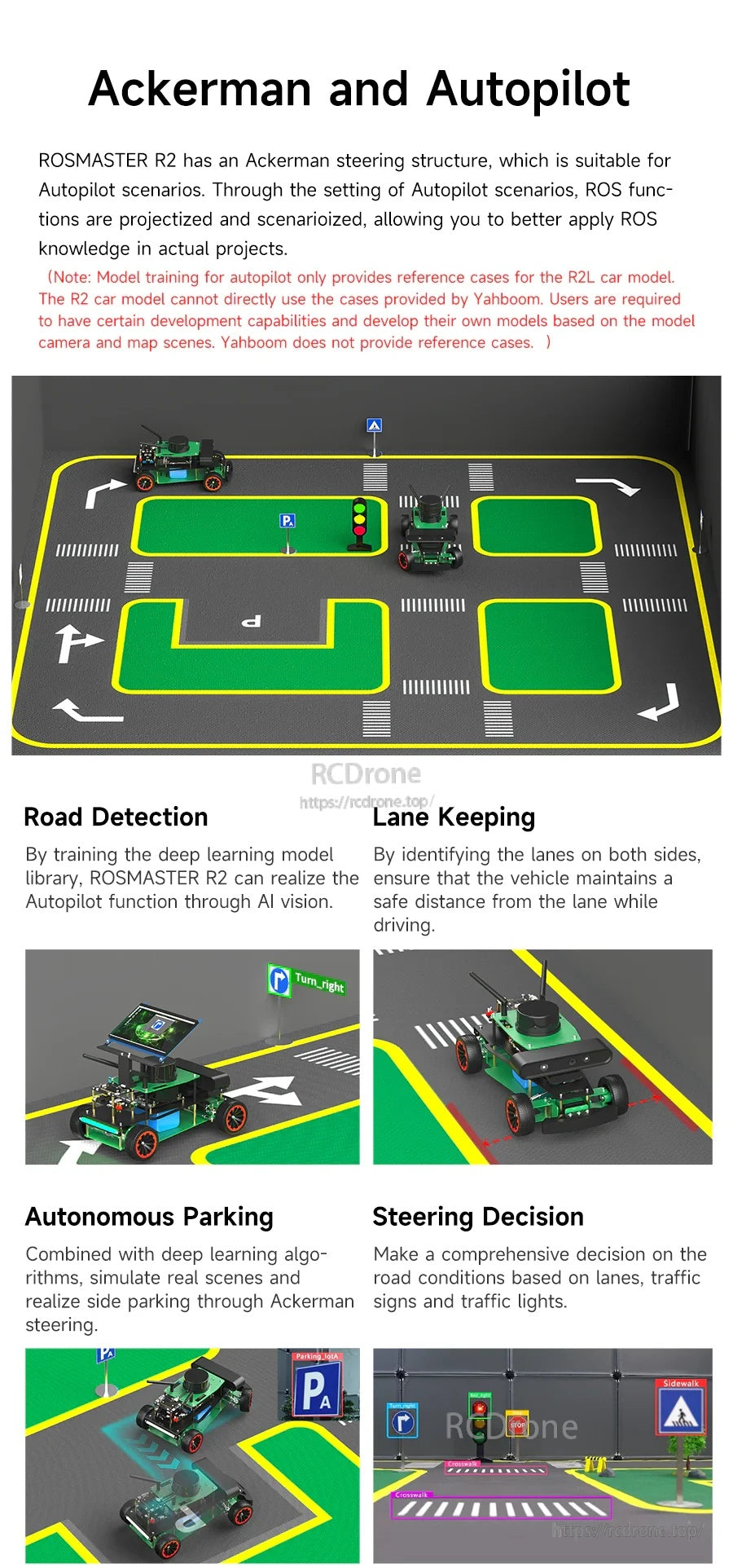
자율주행 학습 주제에는 차선 유지, 도로 감지, 조향 결정 및 주차 워크플로우가 포함됩니다.

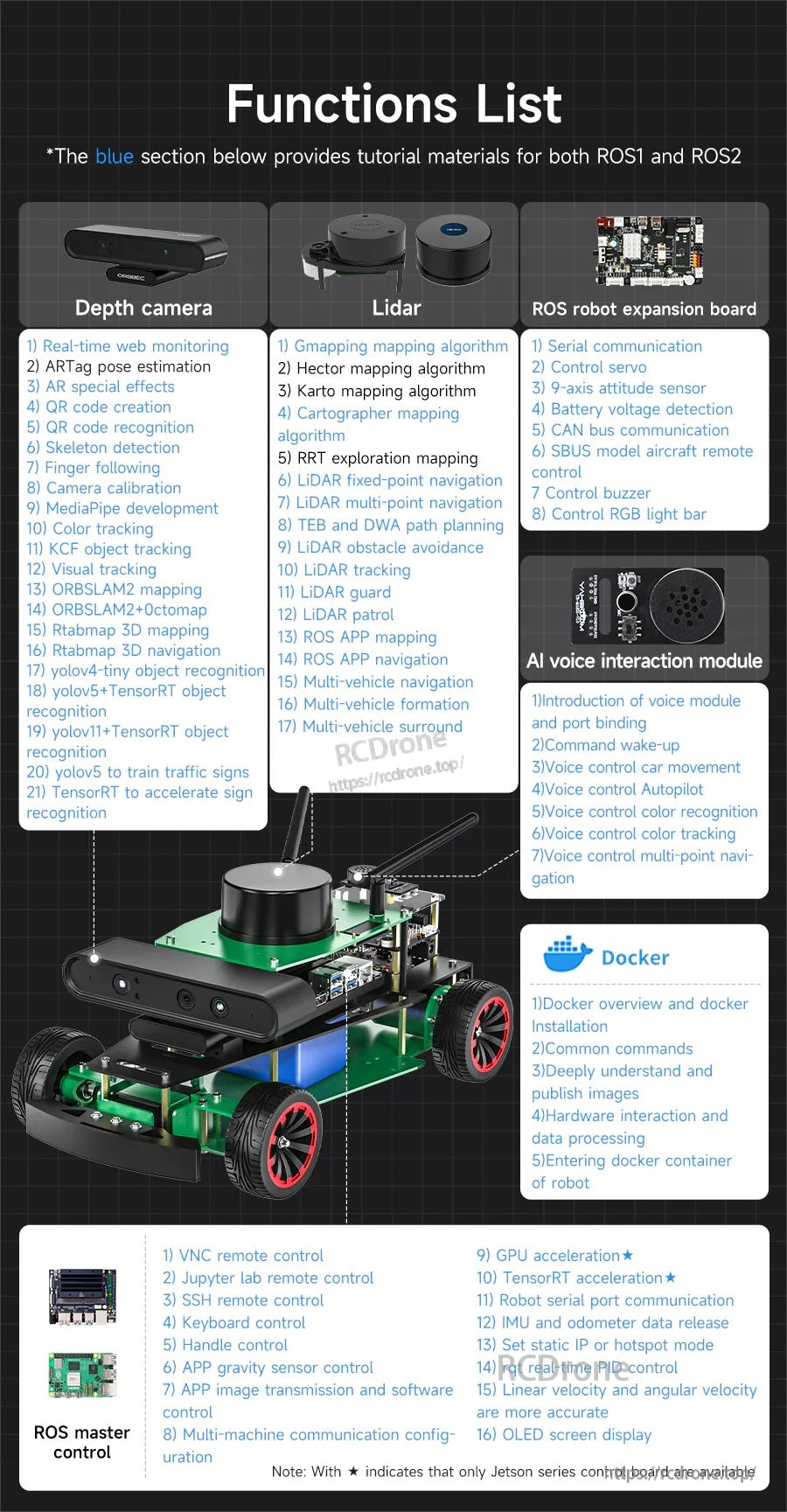
센싱, 내비게이션, 음성 상호작용 및 원격 제어 방법에 걸쳐 광범위한 ROS 주제가 제공됩니다.
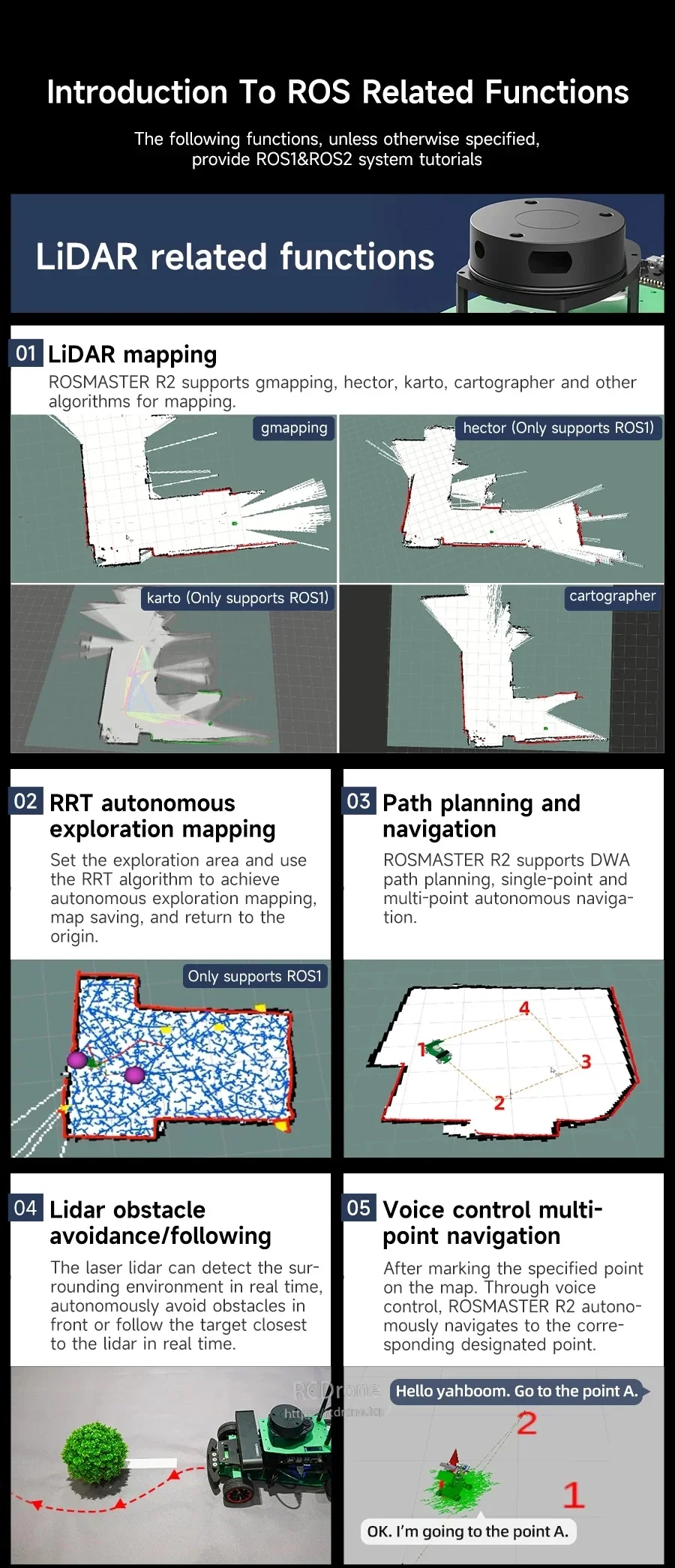
LiDAR 중심의 데모는 매핑, 탐색, 경로 계획, 장애물 회피 및 음성 안내 포인트 내비게이션을 포함합니다.
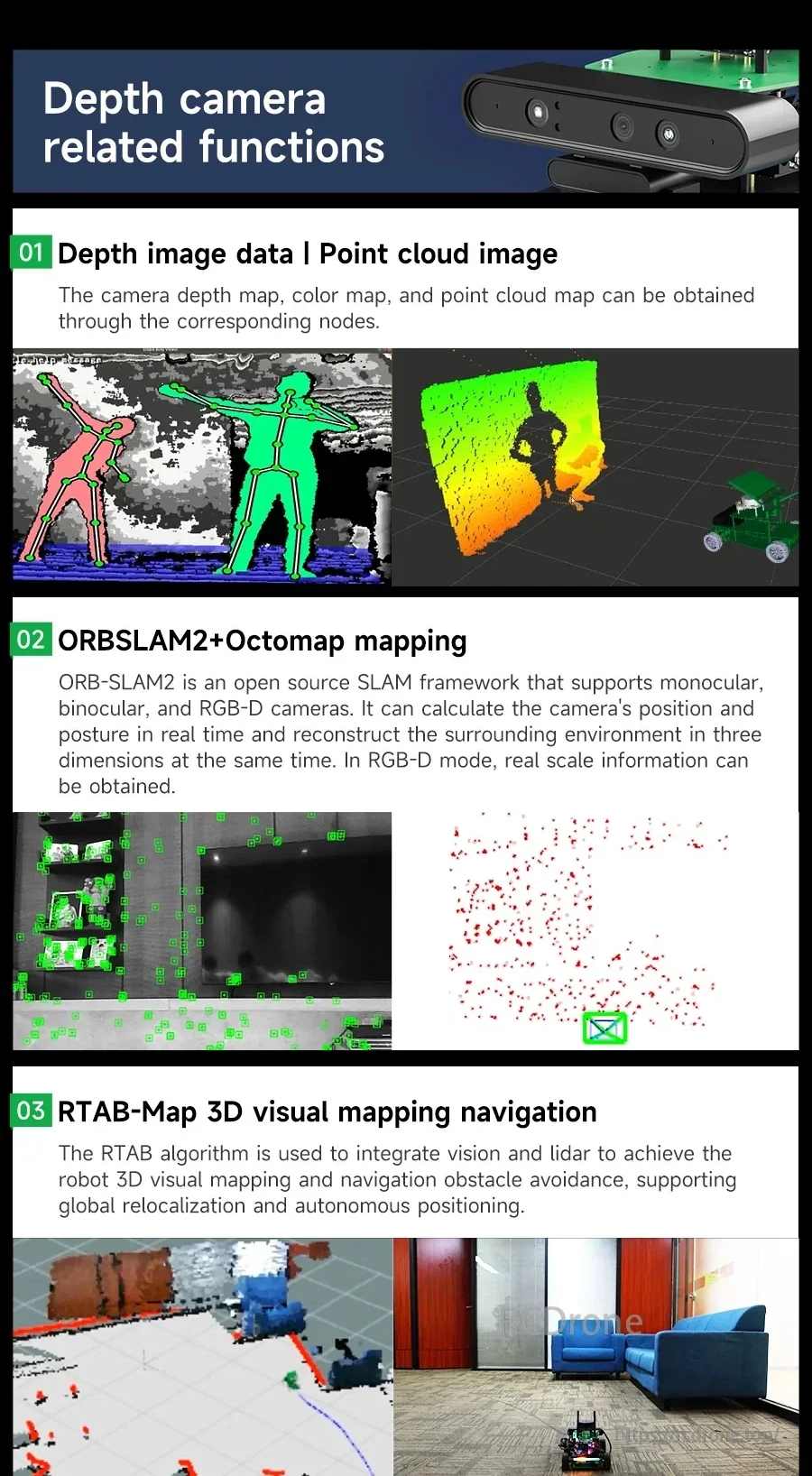
깊이 카메라 워크플로우에는 포인트 클라우드와 ORB-SLAM2/OctoMap 및 RTAB-Map 3D 내비게이션과 같은 SLAM 옵션이 포함됩니다.
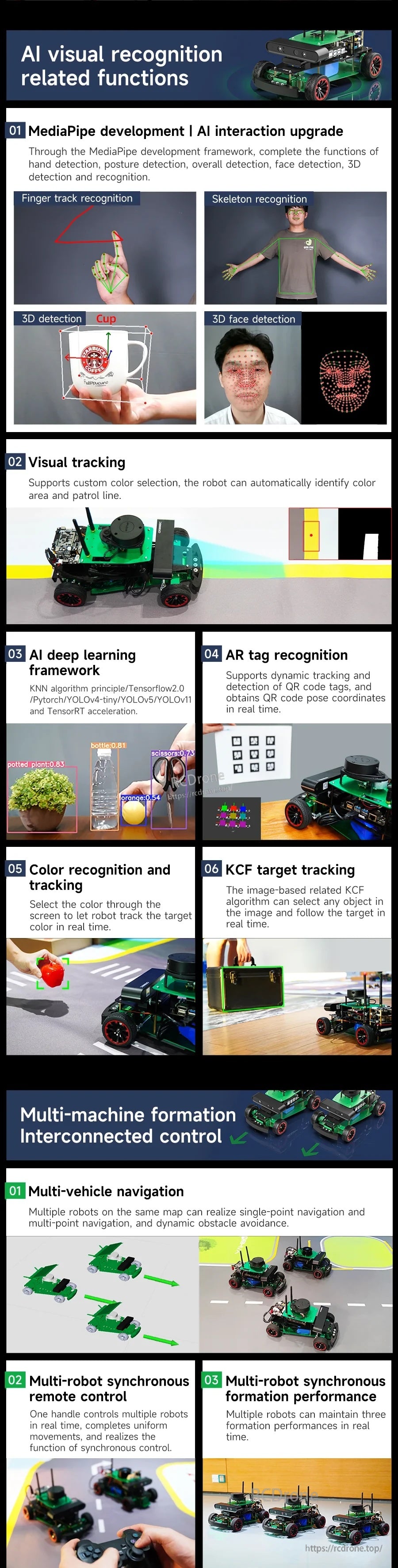
ROSMASTER R2는 MediaPipe 기반 상호작용, AR 태그 및 색상 인식, 타겟 추적과 같은 AI 시각 인식 옵션과 다중 로봇 포메이션 제어를 포함합니다.
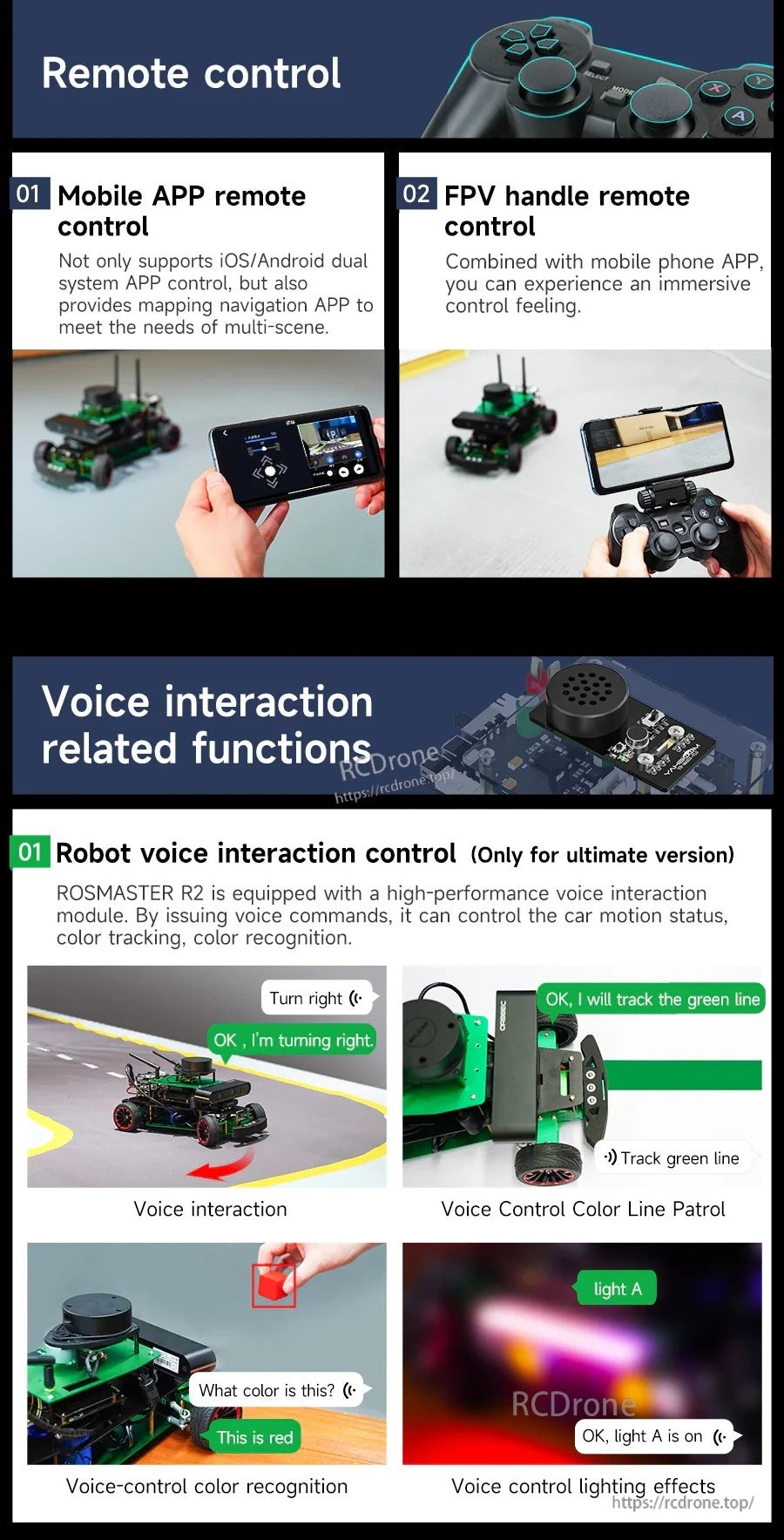
ROSMASTER R2는 모바일 앱 또는 게임패드 원격 제어를 지원하며, 색상 인식 및 추적과 같은 선택적 음성 상호작용 기능을 제공합니다.
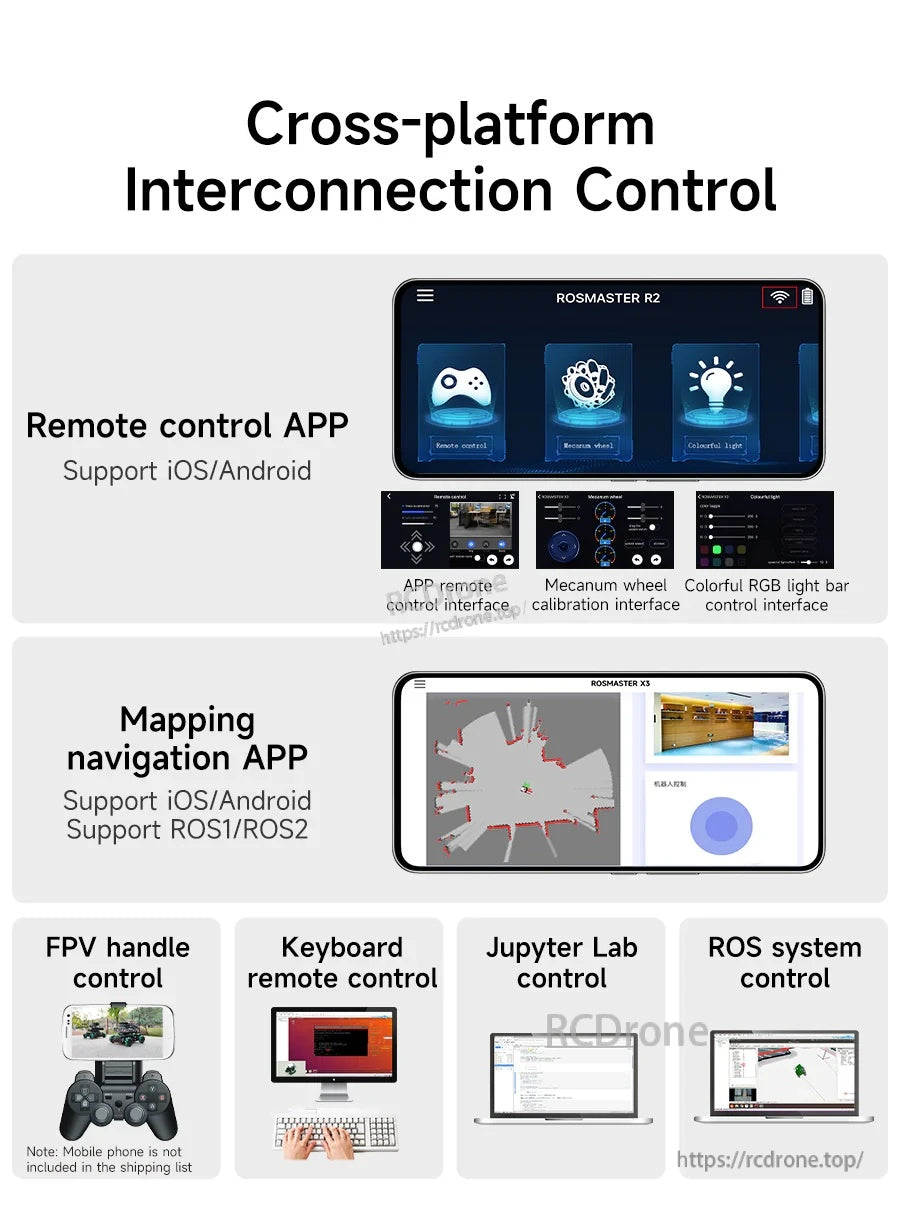
ROSMASTER R2는 iOS/Android 원격 제어 및 매핑 내비게이션 앱을 지원하며, 키보드, Jupyter Lab 및 ROS 시스템 제어와 같은 옵션을 제공합니다.
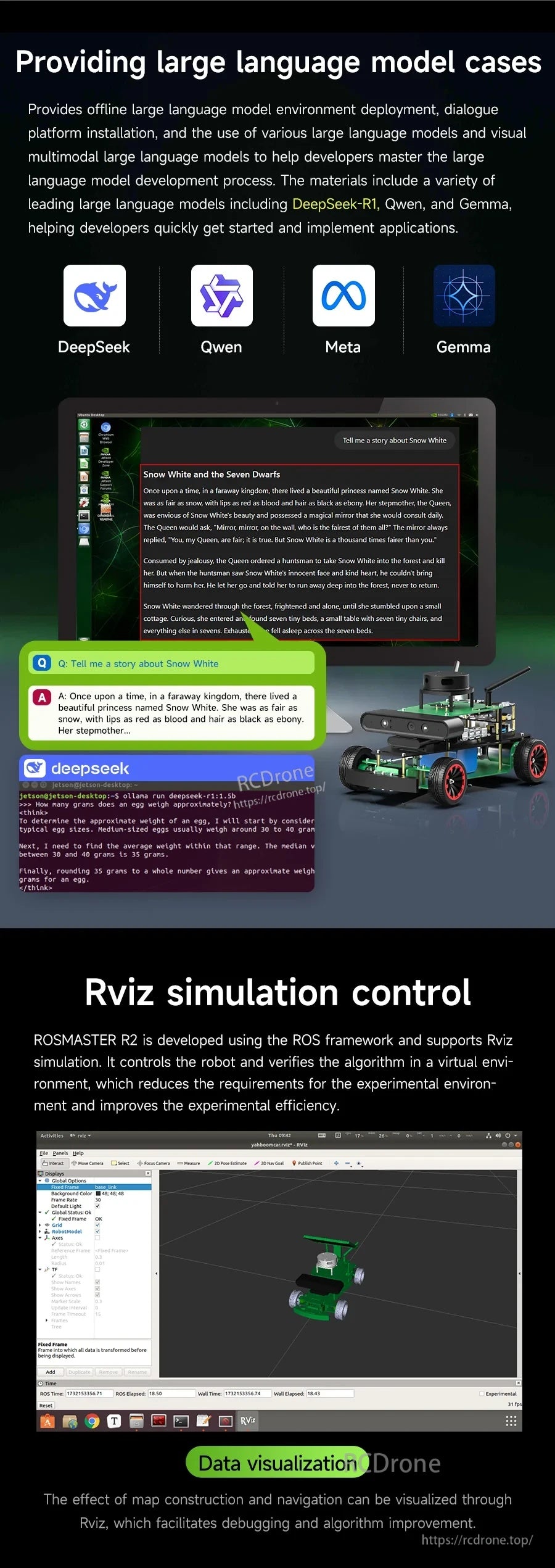
ROSMASTER R2 리소스에는 RViz 시뮬레이션 제어 예제와 ROS2 학습을 위한 대형 언어 모델 사례 참조가 포함됩니다.
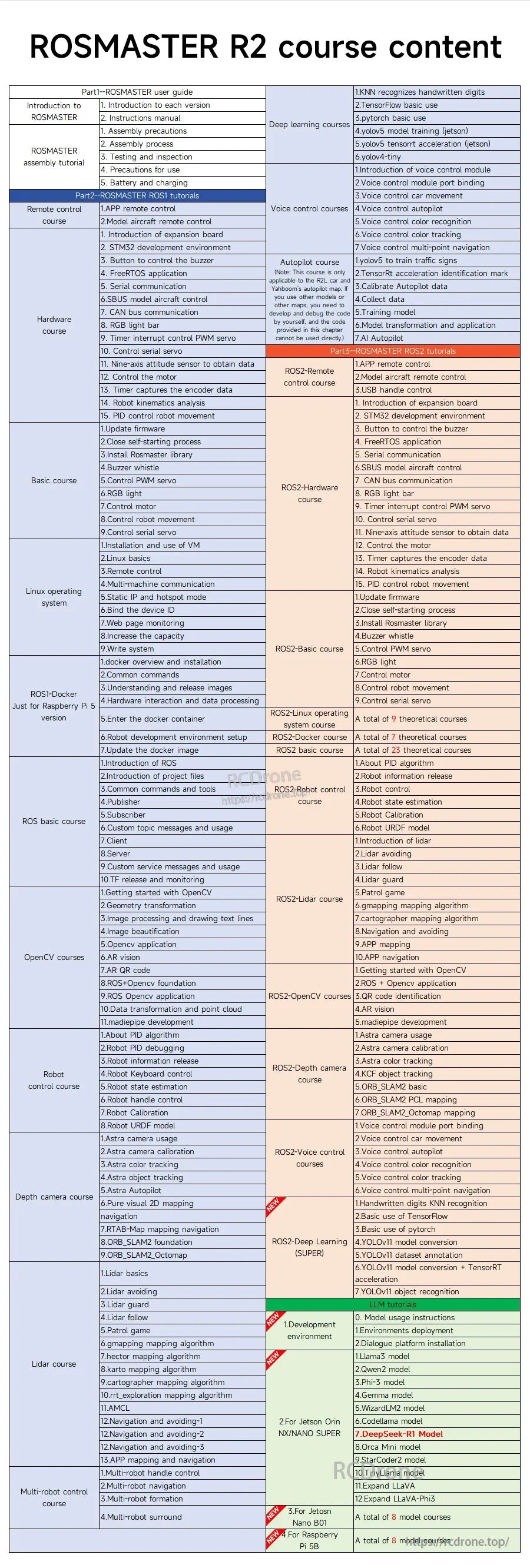
ROSMASTER R2 코스 콘텐츠는 Ackermann 로봇을 구축하고 제어하기 위한 단계별 ROS2 레슨과 모듈 주제로 구성되어 있습니다.
ROSMASTER R2에는 설정 및 프로그래밍을 시작하는 데 도움이 되는 ROS 튜토리얼 폴더와 코스 개요가 포함된 다운로드 페이지가 있습니다.
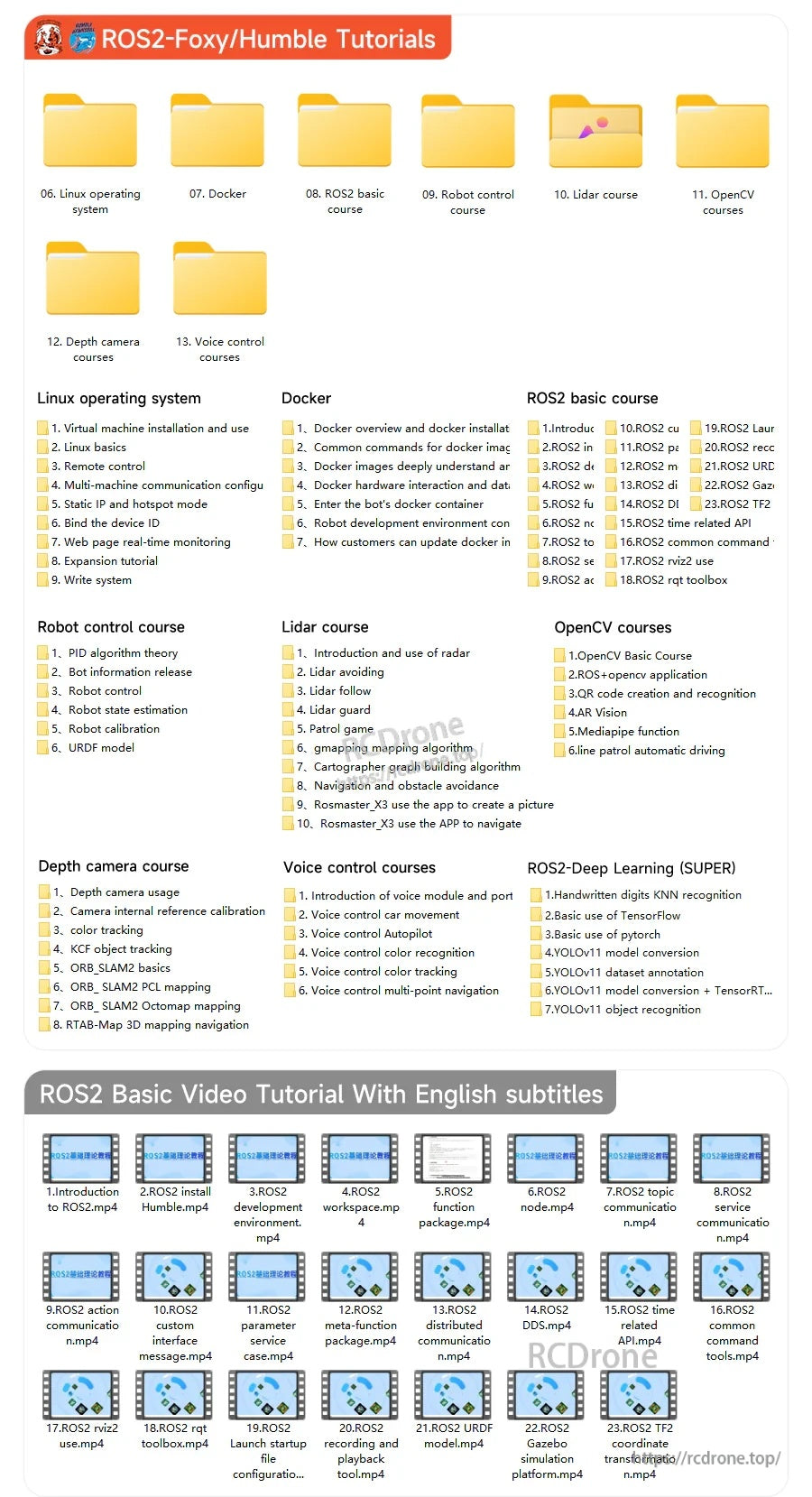
ROSMASTER R2에는 Linux, Docker, lidar, OpenCV 및 기본 ROS2 레슨과 같은 주제를 다루는 ROS2 Foxy/Humble 튜토리얼 리소스가 영어 자막과 함께 포함되어 있습니다.
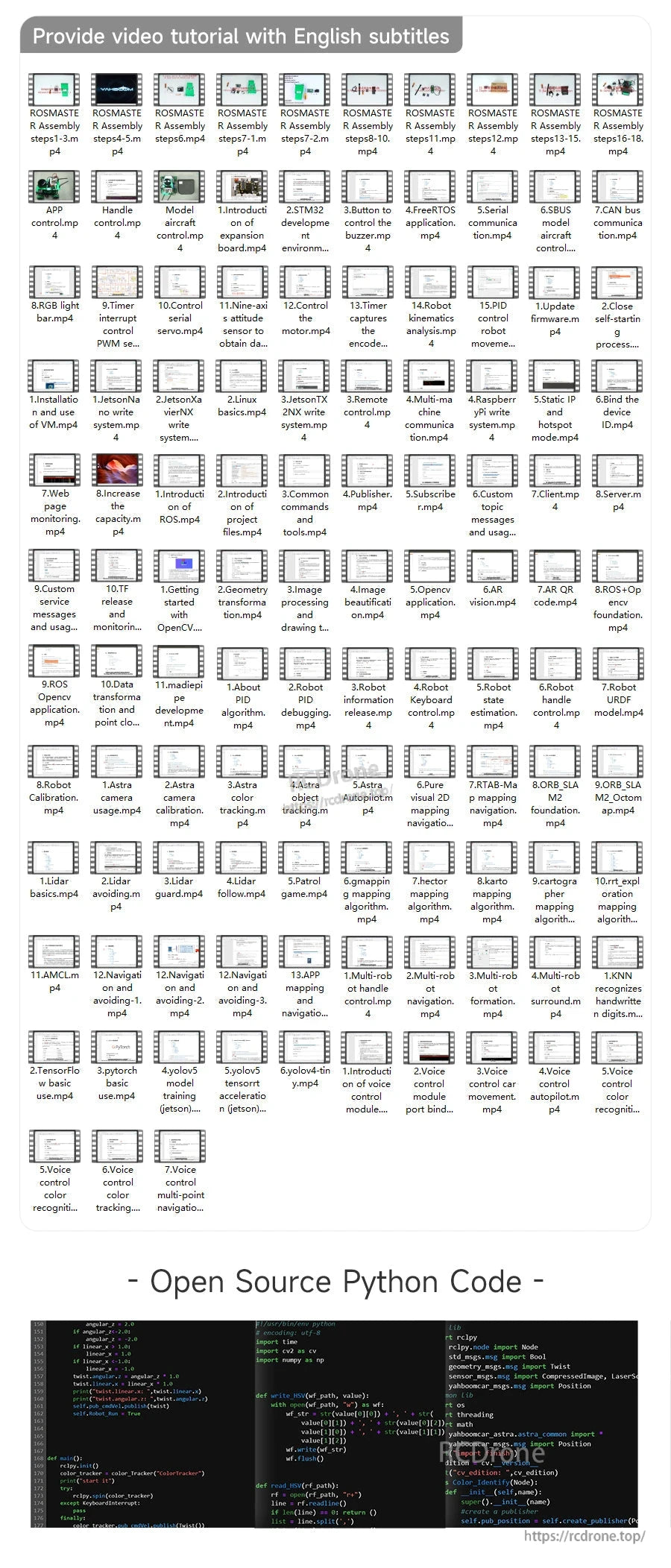
ROSMASTER R2에는 영어 자막 비디오 튜토리얼과 ROS2 개발을 위한 오픈 소스 Python 코드가 포함된 다운로드 가능한 리소스가 포함되어 있습니다.
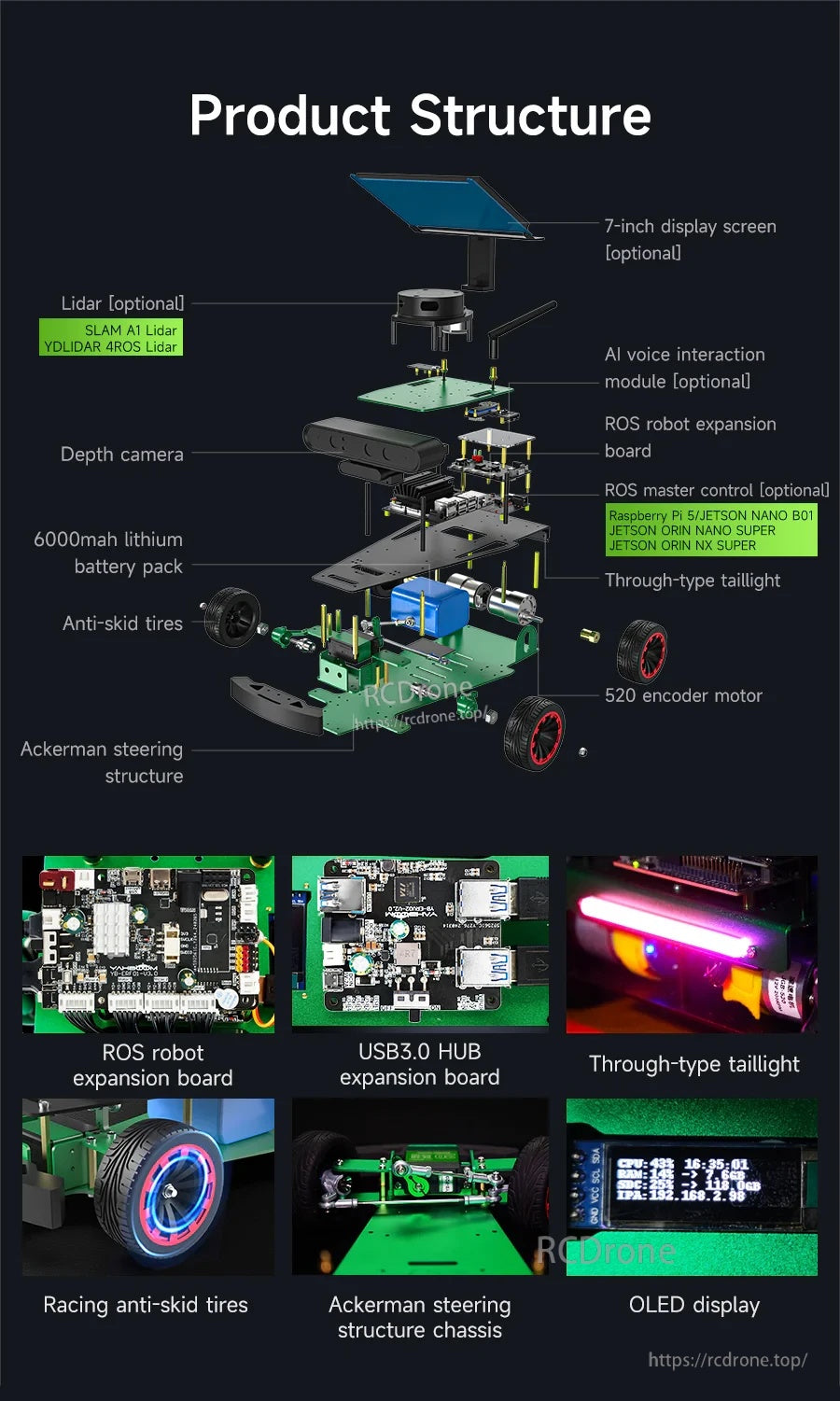
ROSMASTER R2는 확장 보드, 엔코더 모터, 배터리 팩 및 lidar, 깊이 카메라, 7인치 디스플레이와 같은 선택적 모듈이 포함된 Ackermann 조향 섀시를 사용합니다.

ROSMASTER R2는 SLAM A1 또는 YDLIDAR 4ROS 레이저 라이다를 지원하며, 인식을 위해 2MP로 업그레이드된 Astra Pro Plus 깊이 카메라를 포함합니다.
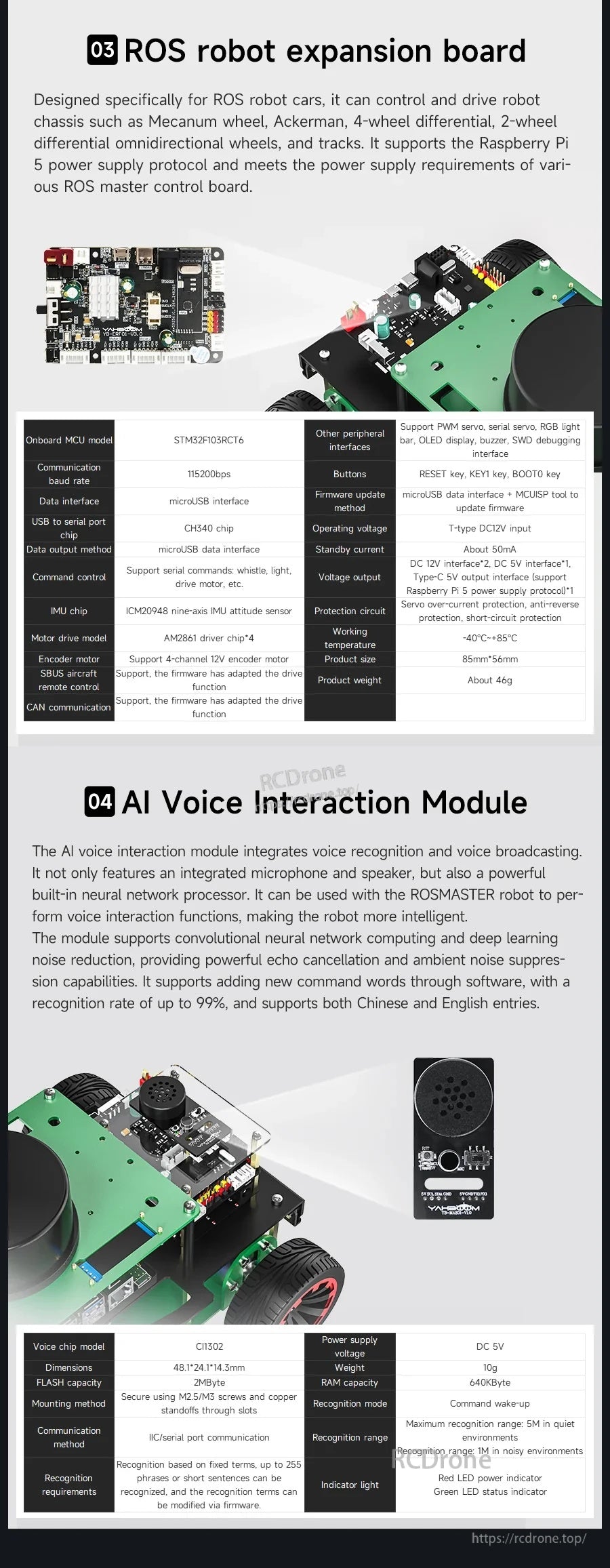
ROS 로봇 확장 보드와 AI 음성 상호작용 모듈은 ROSMASTER R2 섀시와 통합되어 센서 연결 및 음성 제어 기능을 지원합니다.
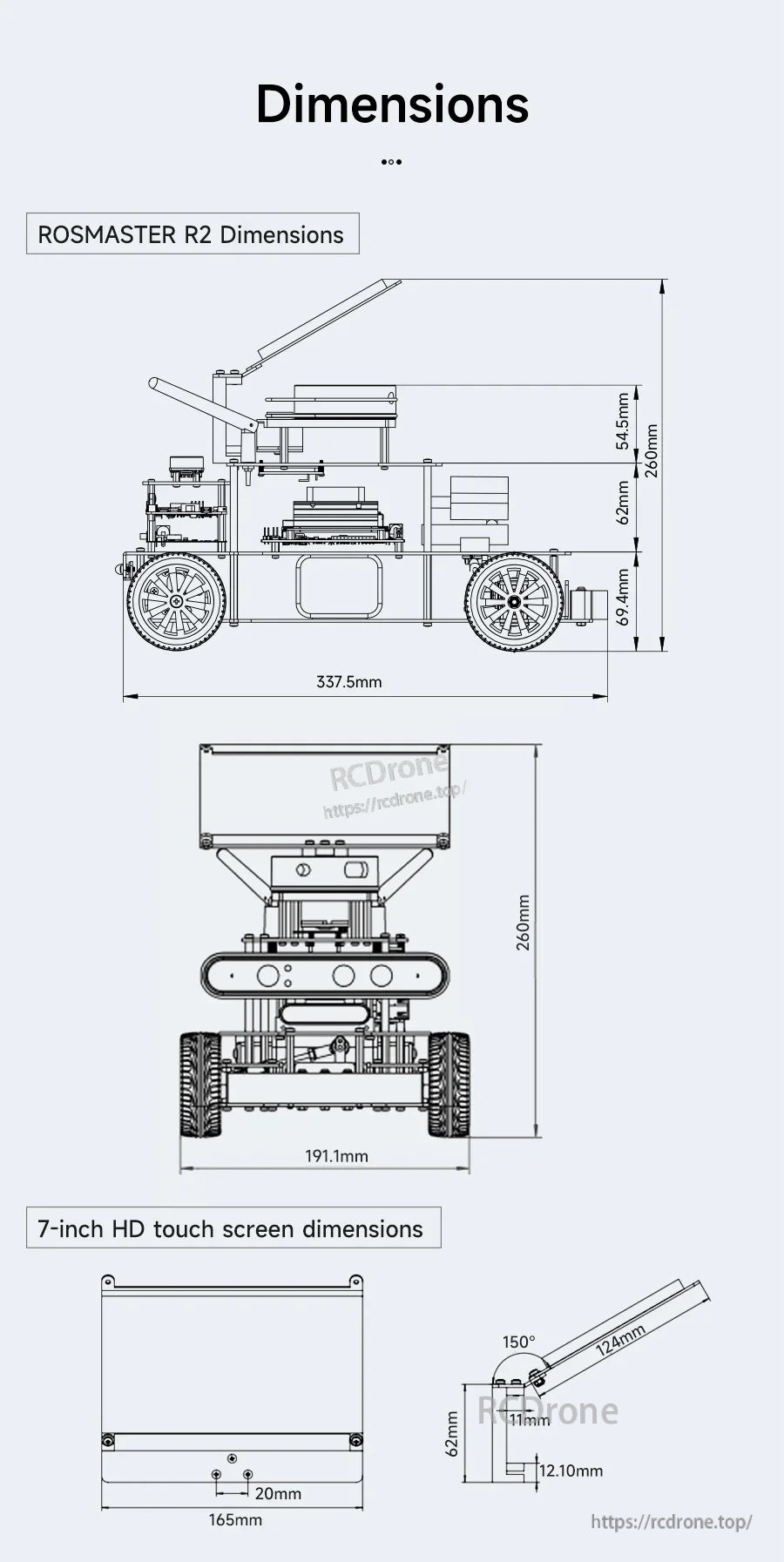
ROSMASTER R2 치수 뷰는 인클로저 계획을 위한 7인치 HD 터치 스크린 크기와 함께 주요 전체 길이 및 너비 참조를 제공합니다.
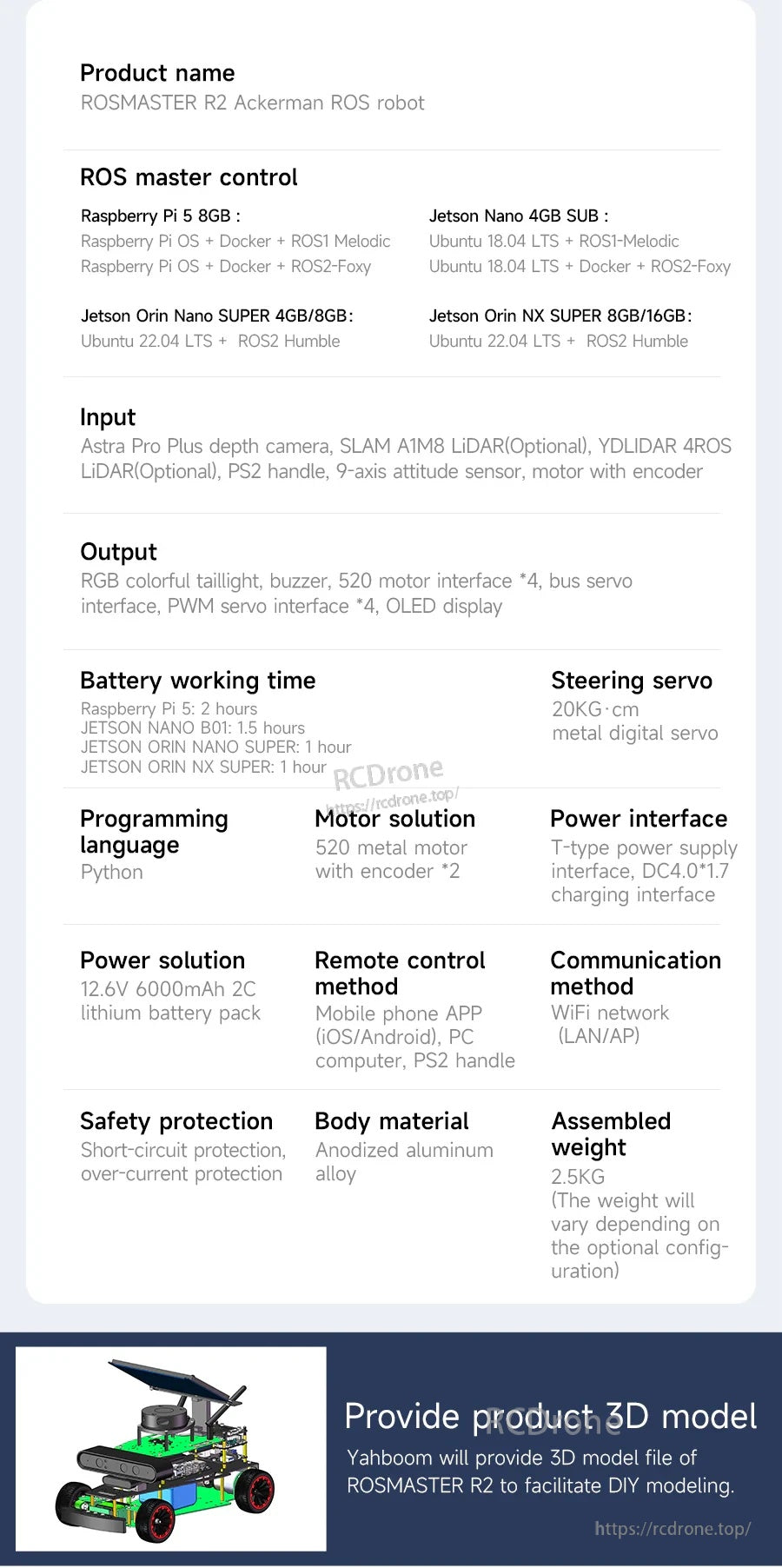
ROSMASTER R2 Ackermann ROS2 로봇은 Raspberry Pi 5/4 또는 Jetson Orin Nano/AGX를 지원하며, 카메라/SLAM/LiDAR 입력 및 앱 또는 원격 제어 옵션을 제공합니다.
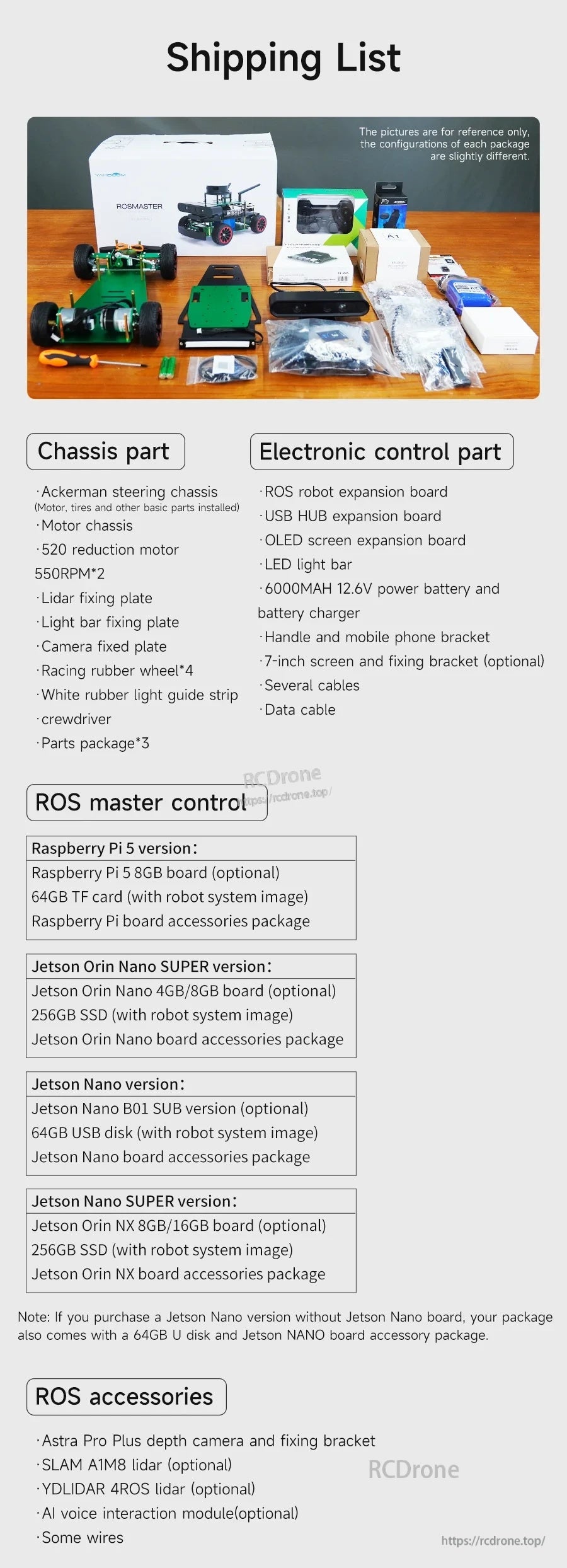
ROSMASTER R2 키트에는 Ackermann 조향 섀시, 전자 제어 보드, 카메라 모듈, 배선 및 조립을 위한 다양한 장착 액세서리가 포함되어 있습니다.
































