



S2-F290 프로그래밍 가능 드론 - Pixwawk 오픈 소스 ROS SLAM AI 2차 개발 드론 챌린지를 위한 산업 수준
S2-F290 프로그래밍 가능 드론 - Pixwawk 오픈 소스 ROS SLAM AI 2차 개발 드론 챌린지를 위한 산업 수준
RCDrone
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
그만큼 S2-F290 프로그래밍 가능한 드론 고성능입니다 산업용 드론 2차 개발 및 드론 도전을 위해 설계되었습니다. 2400g의 탑재량, 아 6S 6000mAh 배터리, 그리고 최대 제어 거리 10KM, 정밀성을 제공합니다 GPS 위치 정확도는 약 1–2m 그리고 레벨 3-4의 바람 저항. 에 의해 구동됨 Pixhawk 2.4.8 비행 컨트롤러 ~와 함께 오픈소스 ROS SLAM 기술드론은 다음과 같은 고급 기능을 지원합니다. 3D LiDAR 매핑, YOLO 기반 객체 인식 및 편대 비행. 그것은 3mm 탄소섬유 프레임 극한 조건에서 테스트된 뛰어난 내구성과 안정성을 보장합니다. 이 플랫폼은 중국어/영어 QGC 지상국 지원, 모듈식 확장성, 포괄적인 튜토리얼과 같은 기능을 제공하는 고도로 사용자 정의가 가능하여 연구, 경쟁 및 개발 애플리케이션에 이상적입니다.
사양
항공기
| 매개변수 | 사양 |
|---|---|
| 이름 | S2-F290 프로그래밍 가능한 드론 |
| 탑재 중량 | 2400g |
| 모델 | S2-F290 |
| GPS 위치 정확도 | ≈1–2m |
| 휠베이스 | 290mm |
| 최대 이륙 중량 | 3190g |
| 배터리 | 6S 표준 6000mAh 배터리 |
| 제어 거리 | 10KM (1000m 이내 권장) |
| 바람 저항 | 레벨 3-4 |
| 운영 환경 | 실내/실외 |
| 내구성 테스트 결과 | 세부 |
|---|---|
| 프로펠러 | 7인치 |
| 배터리 용량 | 6S 6000mAh (5300mAh 사용) |
| 환경 | 잔잔한 |
| 비행 시간 | 11분 30초 |
비행 컨트롤러
| 요소 | 사양 |
|---|---|
| FMU 프로세서 | STM32H743 Cortex-M7, 480MHz, 2MB 플래시, 1MB SRAM |
| IO 프로세서 | STM32F103 Cortex-M3, 72MHz, 64KB SRAM |
| 센서 | 가속도계/자이로스코프: ICM-42688-P |
| 가속도계/자이로스코프: BMI055 | |
| 자력계: IST8310 | |
| 기압계: MS5611 | |
| 정격 전압 | 최대 입력 전압: 6V |
| USB 전원 입력: 4.75-5.25V | |
| 서보 입력: 0-36V | |
| 정격 전류 | 원격측정 1 최대 출력 전류: 1A |
| 다른 포트의 결합 전류: 1A | |
| 기계 데이터 | 크기: 53.3 × 39 × 16.2mm |
| 무게: 39.2g | |
| 포트 | - 14개 PWM 출력(IO에서 8개, FMU에서 6개) |
| - 2개의 일반용 직렬 포트 | |
| - GPS 포트 2개 | |
| - 1개의 I2C 포트 | |
| - 2개의 CAN 포트 | |
| - Spektrum/DSM, S.BUS, CPPM 등을 위한 RC 입력 | |
| - 전원 입력 포트 | |
| 기타 기능 | 작동 온도: -40–85°C |
온보드 컴퓨터
| 요소 | 사양 |
|---|---|
| 컴퓨팅 파워 | 40탑스 |
| 그래픽 카드 | 1024코어 NVIDIA Ampere GPU를 탑재한 32개의 Tensor 코어 |
| CPU | 6코어 Arm Cortex-A78AE v8.2 64비트, 1.5GHz |
| 숫양 | 8GB 128비트 LPDDR5 68GB/s |
| 저장 | SD 카드 또는 외부 NVMe |
| 최대 CPU 주파수 | 1.5GHz |
리모컨
| 요소 | 사양 |
|---|---|
| 작동 전압 | 4.2V |
| 작동 전류 | 100mA |
| 주파수 대역 | 2.4~2.483GHz |
| 무게 | 525g |
| 치수 | 130×150×20mm |
| 배터리 수명 | 20시간 |
| 충전 포트 | 마이크로 USB |
| 제어 범위 | 7km |
GPS
| 요소 | 사양 |
|---|---|
| 위성 수신기 | UBLOX-M9, 92채널 |
| 전자 나침반 | QMC5883L |
| 위성 시스템 | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| 위성 채널 | 32 |
| 업데이트 속도 | 25Hz |
| 위치 정확도 | 1.5m CEP(이상적인 환경) |
| 시작 시간 | 콜드 스타트: 24초, 핫 스타트: 1초 |
| 치수 | 25 × 25 × 8mm (크기) |
| 무게 | 12g |
배터리
| 요소 | 사양 |
|---|---|
| 커넥터 유형 | XT60 |
| 권장 충전 전류 | 3~5A |
| 배터리 용량 | 6000mAh |
| 정격 전압 | 22.2V |
| 배출율 | 75도씨 |
| 치수 | 50 × 44 × 158mm (폭) |
| 무게 | 816g |
라이다
| 요소 | 사양 |
|---|---|
| 레이저 파장 | 905nm |
| 범위 | 40m @ 10% 반사율, 70m @ 80% 반사율 |
| 최소 감지 영역 | 0.1m |
| 시야 | 수평: 360°, 수직: -7° ~ 52° |
| 포인트 클라우드 출력 | 200,000 포인트/초 |
| 포인트율 | 10Hz |
| 보호 수준 | IP67 |
| 힘 | 6.5W(25°C 환경) |
| 전압 범위 | 9~27V 직류 |
| 치수 | 65 × 65 × 60mm (세로) |
| 무게 | 265g |
깊이 카메라
| 요소 | 사양 |
|---|---|
| 심층 기술 | 듀얼 적외선 |
| 깊이 시야각 | 87° × 58° (수평 × 수직) |
| 심도 해상도 | 1280 × 720 |
| 깊이 정확도 | 2m 이내 <2% |
| 깊이 프레임 속도 | 90fps |
| 깊이 범위 | 0.3~3m |
| 치수 | 90×25×25mm |
| 운영 환경 | 실내/실외 |
단렌즈 카메라
| 요소 | 사양 |
|---|---|
| 최대 해상도 | 2MP(1920×1080) |
| 최대 프레임 속도 | 30프레임 |
| 시야 | ~90° |
| 케이블 길이 | ~1.5분 |
| 치수 | 35 × 35 × 30mm (세로) |
함수 테이블
| 기름 부음 | 기본 구성 | 옵션 D435 | 옵션 D435 + 4G 모듈 |
|---|---|---|---|
| 고도 유지, 호버링, 홈으로 복귀 | ✔ | ✔ | ✔ |
| 착륙, 안정화, 경로점 비행 | ✔ | ✔ | ✔ |
| 원격 조종 비행 | ✔ | ✔ | ✔ |
| 비행 컨트롤러와 온보드 컴퓨터 간의 통신 | ✔ | ✔ | ✔ |
| QR코드 인식 및 랜딩 | ✔ | ✔ | ✔ |
| 객체 인식 및 드롭 | ✔ | ✔ | ✔ |
| 동시 매핑 및 장애물 회피 | ✔ | ✔ | ✔ |
| 3D LiDAR 매핑 및 위치 지정 | ✔ | ✔ | ✔ |
| YOLO 기반 객체 인식 | ✘ | ✔ | ✔ |
| 객체 인식 및 추적 | ✘ | ✔ | ✔ |
| 4G 원격 제어 | ✘ | ✘ | ✔ |
패키지 포함 사항
기본 구성
- 액자: F290 카본 파이버 프레임
- 모터: 4× T-모터 F100 Kv1100
- 키보드: 4× 플라이펀 티렉스 5 45A
- 프로펠러: 4× 7인치 3날 프로펠러
- 비행 컨트롤러: 픽스호크6미니
- 배터리: 6S 표준 배터리 6000mAh
- 충전기: 6S 배터리 충전기
- 온보드 컴퓨터: Jetson Orin Nano 8G + WIFI 모듈
- SSD: 256G
- 라이다: 리복스 MID360
- 카메라: 150° 광각 USB 카메라
- 리모컨: Cloud T10 (데이터 수신기 포함)
선택 구성: D435
모든 구성 요소가 포함되어 있습니다 기본 구성, 플러스:
- 듀얼 렌즈 카메라: D435
옵션 구성: D435 + 4G 모듈
모든 구성 요소가 포함되어 있습니다 기초적인 구성, 플러스:
- 듀얼 렌즈 카메라: D435
- 4G 모듈
세부
S2-F290 프로그래밍 가능한 드론
- ✔ 기술 지원, 번거로움 없는 애프터 서비스
- ✔ 경쟁 사례 제공, 사용자 정의 가능
- ✔ 중국어/영어 모바일 지상국
- ✔ 높은 안정성, 높은 성능
- ✔ 실내/실외
S2-F290은 드론 레이싱에 특화된 최첨단 드론으로 탐험과 혁신을 전문으로 합니다.첨단 기술과 무한한 창의성을 통합하도록 설계되었으며, 다양하고 복잡한 환경에 적응할 수 있어 항공 탐사를 보다 접근하기 쉽고 효과적으로 만들 수 있습니다.
이 드론은 엄청난 파워를 가진 컴팩트한 디자인을 특징으로 합니다. 다양한 경쟁 사례를 제공하여 사용자가 성능을 빠르게 마스터하고 최적화할 수 있습니다. 전용 중국어/영어 모바일 지상국을 갖추고 있어 드론 작동 편의성을 크게 향상시킵니다. 또한 경쟁력 있는 소스 코드 설명과 사용자 정의 기능을 제공하여 사용자가 경쟁 시나리오에서 탁월한 성과를 거두는 동시에 최단 시간 내에 원하는 기능을 달성할 수 있도록 합니다.

개발/경쟁/연구의 필요성 충족
| 범주 | 세부 |
|---|---|
| ROS 기본 지식 | - 원격 제어 |
| - 비행 컨트롤러와 온보드 컴퓨터 간의 통신 | |
| 기본 기능 | - 경로 계획 |
| - QR 코드 인식 및 위치 지정 | |
| - 오프보드 자율 순찰 | |
| 고급 기능 | - 착륙을 위한 QR코드 인식 |
| - 객체 인식 및 드롭 | |
| - 동시 매핑 및 장애물 회피 | |
| - 3D LiDAR 매핑 및 위치 지정 | |
| - YOLO 기반 객체 인식 | |
| - 웹 기반 비디오 전송 | |
| - 야외 편대 비행 | |
| - 육공 협력 편성 | |
| 옵션 D435 카메라 기능 | - VINS 시각적 위치 |
| - YOLO 기반 객체 인식 및 추적 | |
| 선택 가능한 4G 통신 기능 | - 4G 원격 제어 |
자율 장애물 회피, 종합적인 안전 보장
자율 장애물 회피를 위해 3D LiDAR를 활용하는 이 드론은 글로벌 경로 계획과 로컬 동적 장애물 회피를 결합하여 모든 방향에서 장애물을 정확하게 감지합니다. 자동 정지와 연속 비행을 지원하여 비행 경로를 따라 물체를 유연하게 회피할 수 있어 보다 안전한 비행 경험을 보장합니다.

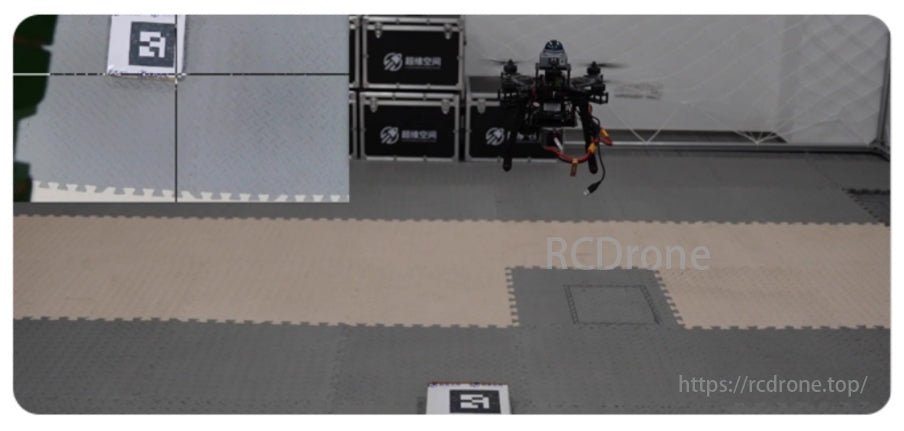
QR 코드 인식 및 착륙
드론은 카메라와 QR 코드 인식 모듈을 활성화하여 QR 코드의 실시간 위치 정보를 획득합니다. 하강하는 동안 드론은 동적으로 위치를 조정하여 착륙하기 전에 카메라의 시야와 정확하게 정렬되도록 합니다.
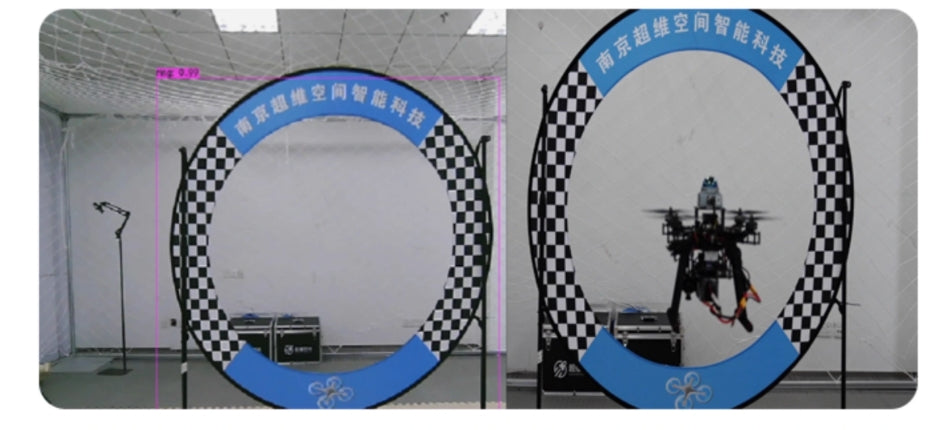
YOLO 객체 인식
드론은 YOLOv8을 사용하여 객체 인식을 수행하고 원형 프레임의 위치 정보를 실시간으로 수집합니다. 자율적으로 위치를 조정하고 원형 프레임을 탐색합니다.
야외 포메이션 비행
드론은 군집 편성 기술을 활용해 여러 대의 드론을 조정하여 편대 비행을 달성합니다.고급 통신 및 협업 제어 알고리즘을 활용하여 드론 간의 실시간 통신 및 정보 교환을 용이하게 하고, 드론의 움직임과 위치를 동기화하여 긴밀한 대형을 형성합니다.

육공 협력 형성
이 플랫폼은 육지와 공중 드론 간의 협력적 편대를 지원합니다. 장치 상호 연결을 위한 토폴로지 구조가 있는 로컬 에어리어 네트워크를 활용하여 UDP 통신과 사용자 정의 프로토콜을 사용하여 고속 및 안정적인 통신을 보장합니다. PID 제어를 통해 메인 드론과 여러 슬레이브 드론 간의 동기화된 추종을 달성하여 편대 안정성과 운영 효율성을 보장합니다.

경쟁 사례
단계별 가이드와 함께 독점적인 경쟁 시나리오를 제공하여 참가자가 다양한 유형의 경쟁에 쉽게 적응할 수 있도록 돕습니다.



S2-F290 프로그래밍 가능 드론의 특징
높은 비용 대비 성능
- 초보자를 대상으로 설계되어 학습 곡선을 줄이고 드론 조작을 보다 쉽게 익힐 수 있습니다.
- 저렴한 가격으로 학생과 매니아를 위한 학습용 드론으로 이상적입니다.
높은 안정성
- 3년 이상 다양한 극한 환경에서 테스트를 거쳤습니다.
- 내구성과 안정성이 강화된 3mm 두께의 탄소 섬유 프레임을 장착했습니다.
- 사용자가 첫 번째 경쟁 경험에서 인정을 받을 수 있도록 해줍니다.
확장성
- 다양한 애플리케이션에 대한 고급 사용자 정의를 지원합니다.
- 다양한 확장 구성 요소와 호환되어 드론 성능과 기능을 지속적으로 개선합니다.
걱정 없는 애프터 서비스
- 포괄적인 지침과 지원을 제공하는 전문가 팀입니다.
- 보증 기간 동안 작동상의 실수로 인한 하드웨어 손상에 대해 무상으로 수리해 드립니다(액세서리 및 배터리 제외).
사용자 정의 가능
- ROS 및 QGC에서 독점적인 개발에 대한 지원을 제공합니다.
- 지도 작성 및 탐색에 98% 이상의 높은 정확도를 지원합니다.
- RTK/GPS 모듈, 로고 및 다양한 고유 기능과 호환됩니다.

지상국 구성
Pixhawk 2.4.8 비행 컨트롤러 사용
최신 표준 32비트 STM32F427 프로세서와 MS5611 기압계를 탑재한 이 비행 컨트롤러는 오픈 소스 옵션으로 풍부한 인터페이스와 높은 비용 성능을 제공합니다.
1. 독점적인 심층 맞춤형 QGC 지상국
- 중국어로 98% 이상의 현지화를 달성했습니다.
- NTRIP와 같은 고급 기능을 지원합니다.
2. 모바일 QGC 지상국
- QGC 지상국의 모바일 버전을 제공하여 스마트폰에서 원활하게 작동할 수 있습니다.
3. Wi-Fi 또는 4G 직접 연결
- 스마트폰이나 컴퓨터를 사용해 Wi-Fi로 연결하기만 하면 작동됩니다.
- 메모: "ezuav" 시스템은 장치에 연결되었지만 인터넷 접속을 제공할 수 없습니다.

포괄적인 튜토리얼 및 완전 오픈 소스 리소스
- S2-F290 드론 기능의 모든 측면을 다루는 매우 자세한 사용 튜토리얼입니다.
- 다음을 포함한 완전히 오픈 소스 자료:
- 소프트웨어 소개 및 설치 가이드.
- OpenCV 기반 객체 인식, 3D 매핑, 오프보드 자율 비행 등 기본 및 고급 기능에 대한 튜토리얼입니다.
- PX4 및 MAVLink 통신을 위한 맞춤 개발 지침.
- 문제 해결 FAQ, ROS 환경 구성 및 운영 단계입니다.
Related Collections


