









SteadyWin GIM3510-8 소형 로봇 관절 모듈, 8:1 유성 기어, CAN 드라이버, 듀얼 엔코더, 24V 60W
SteadyWin GIM3510-8 소형 로봇 관절 모듈, 8:1 유성 기어, CAN 드라이버, 듀얼 엔코더, 24V 60W
SteadyWin
정가
$109.00 USD
정가
$120.00 USD
할인가
$109.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
SteadyWin GIM3510-8 소형 로봇 관절 모듈은 Aloha 모터, 8:1 행성 기어 감속기, 내장 통신 드라이버 및 이중 인코더를 통합한 로봇 관절 액추에이터로, 컴팩트한 원통형 패키지에 담겨 있습니다. 명목상 24 V 전원 공급(드라이버 보드에 따라 12–40 V 또는 12–48 V의 넓은 범위)으로 작동하며, 감속 후 최대 564.6 rpm의 높은 출력 속도와 CAN 버스 통신을 지원하여 민첩한 휴머노이드 로봇, 로봇 팔, 이동 플랫폼 및 정밀한 폐쇄 루프 모션 제어가 필요한 기타 다축 시스템을 위해 설계되었습니다.
주요 특징
- 고속 행성 감속: 8:1 행성 기어박스는 정격 출력 속도 535.5 rpm 및 최대 564.6 rpm(GDZ34)을 제공하며, 빠르게 움직이는 관절에 적합합니다.
- 넓은 전압 범위: 12–40 V(GDZ34) 또는 12–48 V(GDS34) 입력 범위로 유연한 전원 시스템 설계를 위한 명목상 24 V 작동.
- 효율적인 토크 출력: 정격 토크 1.68 N.m 및 피크 토크 6.02 N.m로 최대 0.32 N.m/A의 토크 상수를 제공하여 경량에서 중간 하중 로봇 관절을 위한 효율적인 전력 전송을 제공합니다.
- CAN 버스가 통합된 드라이버: 내장 드라이버 보드(GDS34 또는 GDZ34)는 간소화된 배선 및 네트워크 제어를 위한 CAN 통신을 지원합니다.
- 이중 인코더 피드백: 드라이버에 14비트 인코더와 출력 샤프트에 두 번째 인코더가 있어 정확한 위치 및 속도 피드백을 제공합니다.
- 콤팩트한 구조: 외경 46 mm에 전체 길이는 드라이버 없이 46.5 mm에서 드라이버 포함 51.5 mm까지로, 밀집된 다관절 배치를 가능하게 합니다.
- 환경 내구성: IP54 보호 등급, 작동 온도 -20°C에서 +80°C까지, 소음 수준 60 dB 이하입니다.
- 보호 기능: 과열, 과전압 및 과부하 보호는 연속 작동 로봇 시스템에서 안전하고 신뢰할 수 있는 작동을 유지하는 데 도움을 줍니다.
- 기계적 강도: 출력 샤프트에서 최대 75 N 축 방향 하중 및 300 N 방사형 하중을 지원하며, 감속기 백래시는 15 아크분입니다.
- 맞춤형 브레이크 옵션: 전원이 꺼졌을 때 유지 토크가 필요한 관절을 위한 맞춤형 브레이크 통합을 지원합니다.
GIM3510-8 소형 로봇 관절 모듈에 대한 기술 지원, 맞춤화 또는 통합 질문은 https://rcdrone.top/에 문의하시거나 [email protected]로 이메일을 보내주십시오.
응용 프로그램
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 사족 로봇
- AGV 차량
- ARU 로봇
사양
| 매개변수 | 단위 | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| 모델 | - | GIM3510-8 | GIM3510-8 |
| 드라이버 보드 모델 | - | GDS34 (SDC101) | GDZ34 |
| 정격 전압 | V | 24 | 24 |
| 전압 범위 | V | 12–48 | 12–40 |
| 정격 전력 | W | 98 | 60 |
| 정격 토크 | N.m | 1.68 | 1.00 |
| 최대 토크 | N.m | 3.41 | 6.02 |
| 감속 후 정격 속도 | rpm | 430 | 535.5 |
| 감속 후 최대 속도 | rpm | 529 | 564.6 |
| 정격 전류 | A | 4.1 | 2.5 |
| 최대 전류 | A | 8.30 | 25.30 |
| 상 저항 | 옴 | 0.48 | 0.48 |
| 상 인덕턴스 | mH | 0.31 | 0.31 |
| 속도 상수 | rpm/V | 22.04 | 23.53 |
| 토크 상수 | N.m/A | 0.44 | 0.32 |
| 폴 쌍 수 | 쌍 | 7 | 7 |
| 기어 비율 | - | 8:1 | 8:1 |
| 기어 유형 | - | 행성형 | 행성형 |
| 감속기 기어 재질 | - | ALU | ALU |
| 감속기 기어 백래시 | 아크분 | 15 | 15 |
| 드라이버 없이 모터 무게 | g | 247.6 | 247.6 |
| 드라이버 포함 모터 무게 | g | 259.6 | 259.6 |
| 드라이버 없이 크기 (직경 x 길이) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| 드라이버 포함 크기 (직경 x 길이) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| 최대 축 방향 하중 | N | 75 | 75 |
| 최대 방사형 하중 | N | 300 | 300 |
| 소음 | dB | <60 | <60 |
| 통신 | - | CAN | CAN |
| 출력 샤프트의 두 번째 인코더 | - | 예 | 예 |
| 보호 등급 | - | IP54 | IP54 |
| 작동 온도 | °C | -20에서 +80 | -20에서 +80 |
| 인코더 해상도 (드라이버 인코더) | 비트 | 14 | 14 |
| 별도의 인코더 지원 | - | 아니오 | 아니오 |
| 커스텀 브레이크 서포트 | - | 예 | 예 |
매뉴얼
세부사항

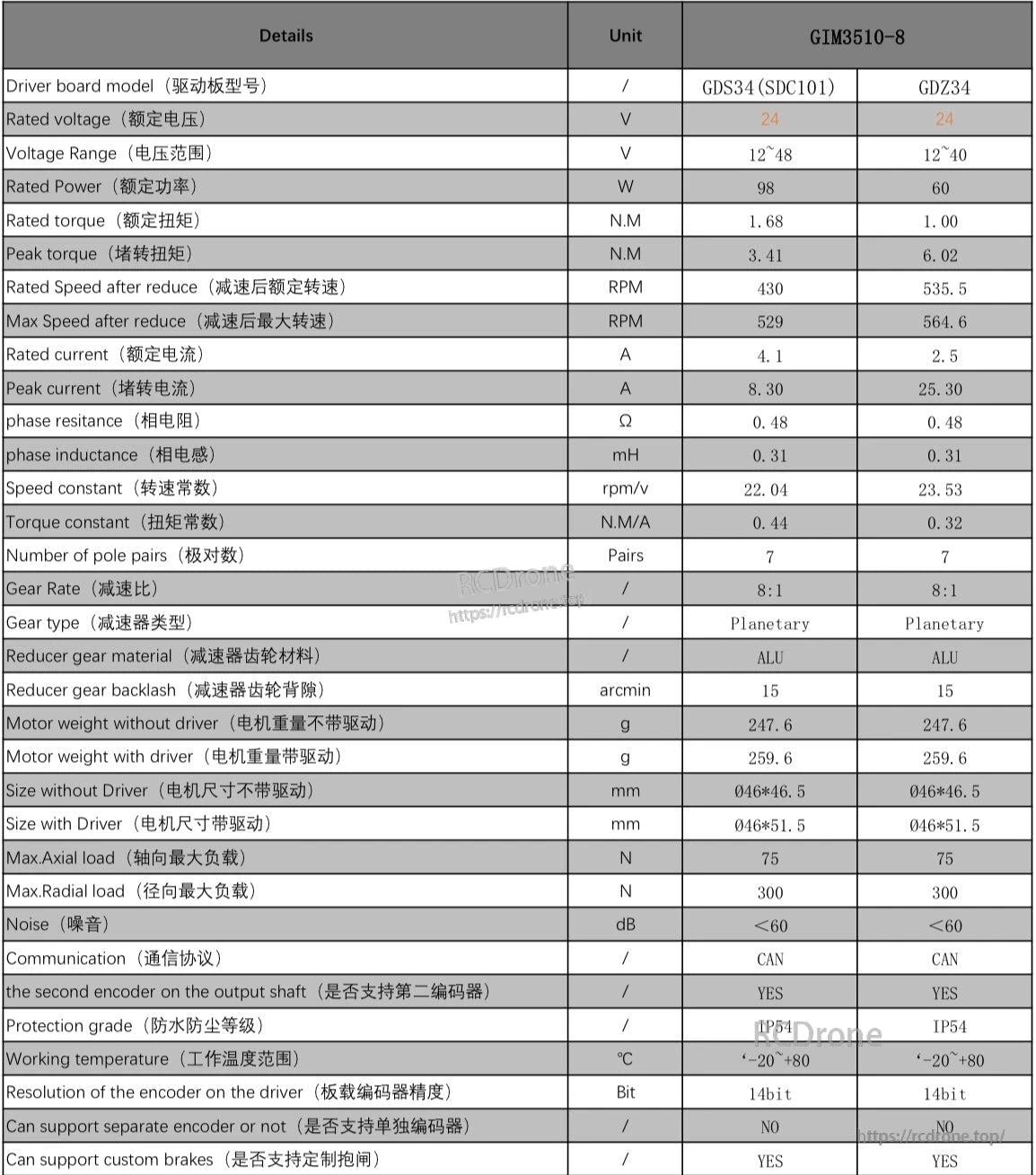
GIM3510-8 로봇 조인트 사양은 GDS34 및 GDZ34 드라이버 보드를 비교합니다. 주요 지표에는 전압, 전력, 토크, 속도, 전류, 무게, 크기, 하중 용량, 소음, 통신, 인코더, 보호 등급, 온도 범위 및 맞춤형 브레이크 지원이 포함됩니다.
Related Collections









