CUAV 고정밀 RM3100 C-컴퍼스 외부 자력계, Pixhawk PX4 ArduPilot DroneCAN/UAVCAN용
CUAV 고정밀 RM3100 C-컴퍼스 외부 자력계, Pixhawk PX4 ArduPilot DroneCAN/UAVCAN용
CUAV
정가
$203.00 USD
정가
할인가
$203.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
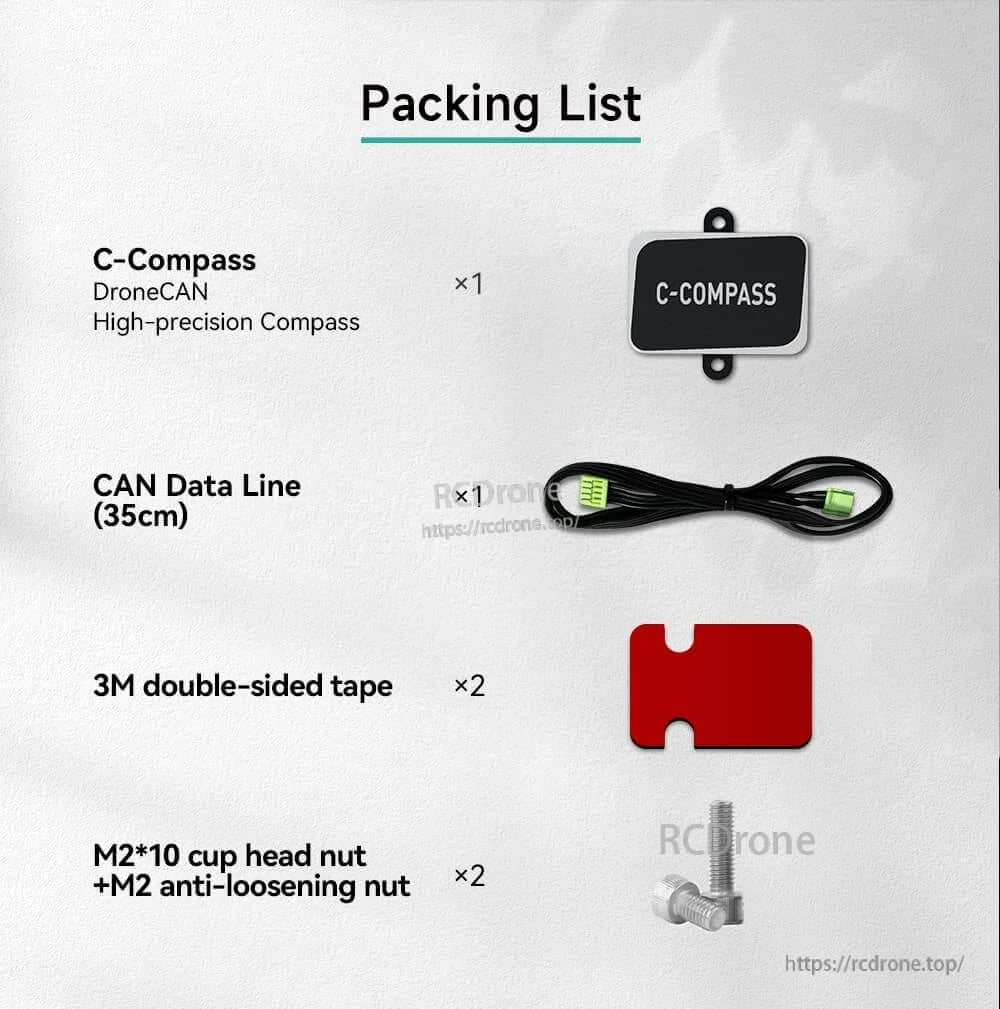
CUAV C-Compass는 Pixhawk 및 PX4 컨트롤러 생태계를 위해 RM3100 자기 센서를 기반으로 구축된 외부 나침반(고정밀 자기계)입니다. DroneCAN/UAVCAN 버스 통신을 사용하며, ArduPilot 및 PX4 플랫폼과 호환되며, 전기적으로 소음이 많은 항공기에서 안정적인 방향 측정을 위해 CUAV M4C 소프트웨어 아키텍처를 실행하는 내장 STM32F4 프로세서를 탑재하고 있습니다.
주요 특징
- RM3100 자기 센서
- 내장 STM32F4 프로세서
- CUAV 자체 개발 M4C 소프트웨어 아키텍처
- APM/PX4 비행 소프트웨어 플랫폼과 호환
- DroneCAN/UAVCAN 프로토콜 지원
- 외부 나침반으로 사용 시 저소음 및 간섭 방지 성능 설계
사양
| MCU | STM32F412 (32 비트 Arm Cortex-M4, 100MHz, 512KB FLASH, 256KB RAM) |
| 센서 | RM3100 |
| 소프트웨어 아키텍처 | CUAV M4C |
| 프로토콜 | DroneCAN/UAVCAN |
| 통신 속도 | 2Mb |
| 갱신 속도 | 80Hz |
| 소음 | 15nT |
| 정확도 | 0.25° (유효값) |
| 반복 정확도 | 0.05° |
| 해상도 | 0.01° |
| 감도 | 13nT |
| 범위 | -800 μT에서 +800 μT |
| 컨트롤러 유형 | PX4/ArduPilot (CUAV/Pixhawk 등) |
| 인터페이스 | GHR-04V-S |
| 작동 전압 | 4.75-5.3V |
| 작동 온도 | -20에서 80°C |
| 작동 습도 | 5%에서 95% (비응축) |
| 케이싱 재질 | 알루미늄 합금 |
| 크기 | 31.5 x 31.0 x 14.0mm |
| 무게 | 13g |
| 기재된 무게 | 0.5 kg |
| 기재된 치수 | 20 x 10 x 10 cm |
옵션
- C-나침반 * 3개
- C-나침반 & NEO 3 GPS / 세트
- C-나침반 & NEO 3 Pro GPS / 세트
- C-나침반 & NEO 3X GPS / 세트
응용 프로그램
- Pixhawk 및 CUAV 자율 비행기 구축을 위한 외부 나침반/방향 감지, PX4 또는 ArduPilot 실행
- 간섭 원(케이블, 배터리, 모터)에서 멀리 장착하여 자기 측정 안정성 향상
통합 및 호환성 질문(DroneCAN/UAVCAN 설정, ArduPilot/PX4 매개변수, 배선)에 대한 문의는 [email protected] or 방문하십시오 https://rcdrone.top/.
Related Collections