




Flywoo GOKU GM10 Nano V3 GPS 모듈(컴퍼스 포함), M10050 GNSS, 2.6g, 12x17x5mm, 6-핀
Flywoo GOKU GM10 Nano V3 GPS 모듈(컴퍼스 포함), M10050 GNSS, 2.6g, 12x17x5mm, 6-핀
FLYWOO
정가
$31.49 USD
정가
할인가
$31.49 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
제공된 정보를 기반으로 GM10 V3 시리즈는 이전 GM8 V2에 비해 더 빠른 위성 검색을 위해 최신 M10050 GNSS 칩을 사용합니다. 설정 도움이나 호환성 질문이 있는 경우 [email protected] or 방문하십시오 https://rcdrone.top/ .
주요 특징
- 나노 크기 및 경량: 2.6g
- 통합 나침반
- 플러그 앤 플레이(납땜 필요 없음)
- 6핀 패드 커넥터
- GPS 모듈. 세 개의 모듈.
호환성 노트
- 참고: GOKU GM10 V3 GPS의 칩은 제공된 노트에서 M1005로 참조됩니다. Betaflight (BF) 4.3.x 펌웨어만 Ublox 프로토콜을 사용할 수 있습니다. BF 4.2.x 및 이전는 NMEA 프로토콜만 사용할 수 있습니다. 노트에는 두 프로토콜 간 성능 차이가 없다고 명시되어 있습니다.
- BETAFLIGHT: 4.3.0. 이상의 펌웨어를 사용하십시오.
- INAV: 최신 6.0.0 구성 도구, 및 5.0.0. 이상의 펌웨어를 사용하십시오.
사양
| 브랜드 | FLYWOO |
| 모델 | GM10 NANO V3 GPS w/compass |
| 치수 | 12mm*17mm*5mm |
| 무게 | 2.6g |
| 커넥터 | 6핀 패드 |
| 칩셋 | M10050 (10세대 칩) |
| 수신 형식 | GPS, GLONASS, Galileo, BeiDou, QZSS 및 SBAS |
| 기본 프로토콜 | GPS, Galileo, BeiDou |
| 주파수 | GPS L1, GLONASS L1, BeiDou B1, SBAS L1, Galileo E1 |
| 채널 | 72 검색 채널 |
| 감도 (추적) | -162dBm |
| 감도 (재획득) | -160dBm |
| 지원 속도 | 4800bps에서 921600bps (기본 115200bps) |
| 데이터 레벨 | TTL 또는 RS-232 (기본 TTL 레벨) |
| 데이터 프로토콜 | BF4.3.X (UBLOX) / BF4.2.X (NMEA) |
| 출력 주파수 | 1Hz-10Hz (기본 10Hz) |
| 작동 한계 (고도) | 최대 50,000m |
| 작동 한계 (속도) | 최대 500m/s |
| 작동 한계 (가속도) | 4g 미만 |
| VCC | DC 전압: 3.3-5V |
| 작동 온도 | -40 °C ~ +85°C |
| 저장 온도 | -40°C ~ +105°C |
| 지시기 | PPS LED: 빨간색. GPS가 고정되지 않았을 때 PPS LED가 켜지고, 고정되면 꺼집니다. |
| 모듈 핀 (텍스트) | RX, TX, 3.3-5V, GND |
| 나침반/GPS 패드 레이블 (다이어그램) | T, R, G, V, C, D |
| 비행 컨트롤러 패드 레이블 (다이어그램) | TX, RX, GND, 5V, SCL, SDA |
| GM10 NANO V3 (나침반) 레이블 (다이어그램) | SD-SC-V-G-RX-TX |
작동 가이드
나침반 방향 옵션 (표시됨)
- 기본
- 시계 방향 0°
- 시계 방향 90°
- 시계 방향 180°
- 시계 방향 270°
- 시계 방향 0° 뒤집기
- 시계 방향 90° 뒤집기
- 시계 방향 180° 뒤집기
- 시계 방향 270° 뒤집기
- 사용자 정의
Betaflight GPS 및 GPS 구조 모드 설정 (표시됨)
- 시리얼 포트 열기: GPS / 115200 보드레이트.
- GPS 스위치를 켜고 UBLOX/NMEA 프로토콜을 설정합니다.
- RXLOSS 제어 구조물 모드 채널 설정 (예시: AUX 2 GPS 구조물, 값 2000).
- GPS 구조물 모드 옵션 선택 (예시 값): 각도 32; 초기 고도 (미터) 50; 하강 거리 (미터) 200; 집으로의 최소 거리 (미터) 100; 지면 속도 (미터/초) 20.00; 스로틀 최소 1100; 스로틀 최대 1600; 스로틀 호버 1280; 상승 속도 (미터/초) 5.00; 하강 속도 (미터/초) 1.50; 최소 위성 5; 고도 모드 최대 고도; 정상성 검사 켜기.
포함된 항목
- 1x GM10 NANO V3 GPS w/나침반
- 1x 100mm 케이블
- 1x 구리 호일
세부사항
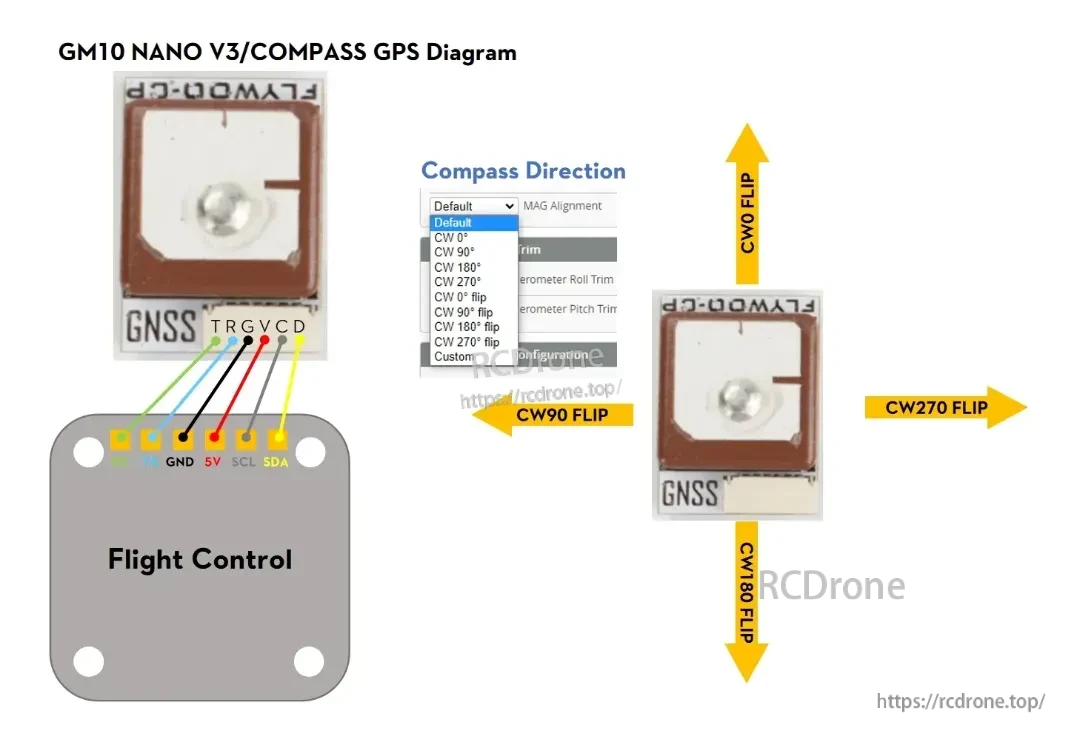
GM10 Nano V3 GPS 배선은 TX/RX와 5V 및 I2C (SCL/SDA)를 사용하며, 다양한 모듈 방향에 대한 나침반 방향 옵션이 있습니다.

Flywoo GOKU GM10 Nano V3 GPS는 비행 컨트롤러에 5V 및 GND 전원과 UART TX/RX로 연결되며, 나침반을 위한 선택적 SDA/SCL이 있습니다.

Flywoo GOKU GM10 Nano V3 GPS는 더 빠른 위성 검색을 위해 설계되었으며, 30개 이상의 위성을 추적할 수 있습니다.

GPS 직렬 포트를 115200 보드로 설정하고 UBLOX/NMEA 프로토콜로 GPS 스위치를 활성화하여 구조 모드를 설정합니다.

GPS 구조 모드는 AUX 채널을 GPS 구조에 할당하고 Betaflight에서 귀환 매개변수를 조정하여 설정할 수 있습니다.




