



SteadyWin DD4015 모터 24V RS485/CAN 앱솔루트 엔코더 14비트 0.25 N.M 125rpm 114g -20~80℃
SteadyWin DD4015 모터 24V RS485/CAN 앱솔루트 엔코더 14비트 0.25 N.M 125rpm 114g -20~80℃
SteadyWin
정가
$152.00 USD
정가
할인가
$152.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
SteadyWin DD4015 모터는 RS485 / CAN 통신과 단회전 절대 인코더(14비트)를 갖춘 컴팩트한 모터입니다. 24V 정격 작동(10~28V 범위)으로 지정되어 있으며, 폐쇄 루프 위치 피드백이 필요한 로봇 작동에 적합합니다.
주요 특징
- 통신: RS485 / CAN
- 인코더: 단회전 절대, 14비트 해상도
- 정격 토크: 0.25 N.M; 최대 토크: 0.35 N.m
- 정격 속도: 125 rpm; 무부하 최대 속도: 1013 rpm
기술 사양
| 매개변수 | 값 |
|---|---|
| 정격 전압 | 24V |
| 전압 범위 | 10~28V |
| 정격 전류 | 1.2A |
| 정격 전력 | 28.8W |
| 정격 토크 | 0.25N.M |
| 명목 속도 | 125rpm |
| 무부하 최대 속도 | 1013 rpm |
| 최대 토크 | 0.35 N.m |
| 최대 전류 | 1.85A |
| 속도 상수 | 42.21rpm/v |
| 토크 상수 | 0.17N.M/A |
| 극 쌍 수 | 11Pairs |
| 상 저항 | 12.57Ω |
| 상 인덕턴스 | 2.48Mh |
| 통신 | RS485 / CAN |
| 인코더 유형 | 단회전 절대형 |
| 해상도 | 14비트 |
| 모터 무게 | 114g |
| 작동 온도 | -20~80℃ |
기계적 / 설치 (도면 기준)
- 모델 마킹: DD4015
- 외경: Ø40 ±0.1
- 전체 길이: 33 ±0.1
- 길이 세그먼트: 12.4 및 20.1
- 축 직경: Ø5
- 전면 패턴: Ø20; 4-M3 (깊이 ▽3); Ø13.6 (+0.05/0) (깊이 ▽2); Ø12.6 (+0.1/0) (깊이 ▽12)
- 후면 패턴: Ø33; 4-M3 (깊이 ▽4.5)
- 커넥터: SH1.0-8PIN
- SH1.0-8PIN 신호: 485_A, 485_B, CAN_H, CAN_L, GND, GND, VCC, VCC
응용 시나리오
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 사족 로봇
- AGV 차량
- ARU 로봇
문서
배선, 통합 또는 주문 지원이 필요하시면 [email protected] or 에 문의하시거나 https://rcdrone.top/.
세부정보
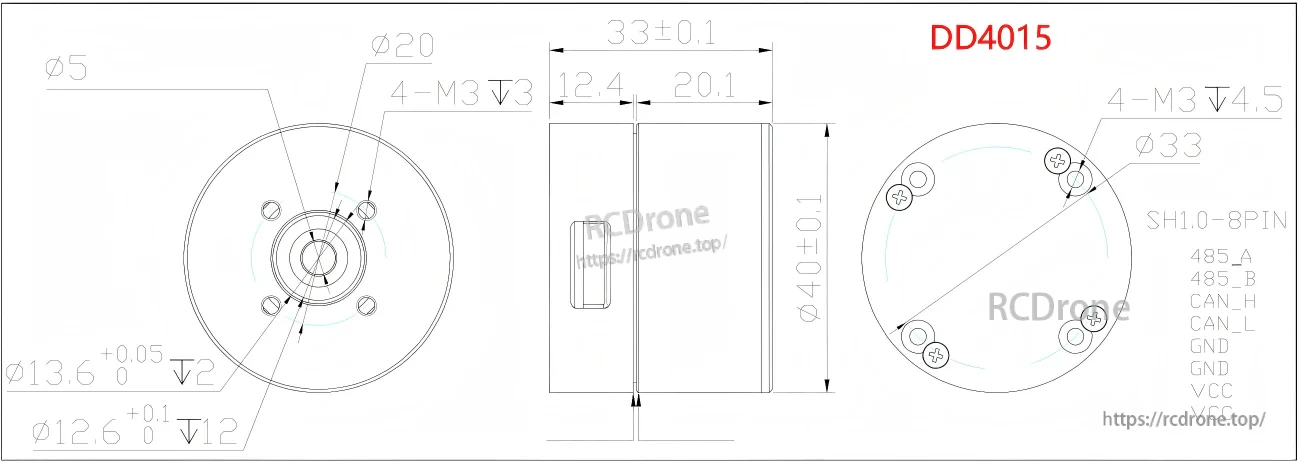
DD4015의 기계적 치수 및 장착 홀 패턴, RS485 및 CAN 배선을 위한 SH1.0 8핀 커넥터 핀 배치.
Related Collections



