SU17 연구용 드론 - MID-360 LiDAR, 쿼드 카메라 SLAM, EGO-Swarm을 사용한 PX4 오픈 소스 산업용 드론 개발
SU17 연구용 드론 - MID-360 LiDAR, 쿼드 카메라 SLAM, EGO-Swarm을 사용한 PX4 오픈 소스 산업용 드론 개발
RCDrone
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
SU17 연구용 드론은 다음과 같은 특징을 갖춘 고성능 쿼드콥터입니다. 6000mAh 배터리, MID-360 라이다 3D 매핑을 위해 쿼드 카메라 SLAM 시스템 정확한 현지화 및 통합을 위해 GPS+GLONASS 위치 지정. 이륙 중량은 2.3kg 그리고 200g의 탑재량, 제공합니다 비행시간 21분 시각적 위치 지정 모드에서. Prometheus 소프트웨어로 구동되며 대상 인식, 경로 계획 및 자율 주행을 지원하여 산업 등급 연구와 혁신을 위한 솔루션.
하드웨어 매개변수
항공기
| 매개변수 | 설명 |
|---|---|
| 항공기 유형 | 쿼드콥터 |
| 이륙 중량(대략) | 2.3kg (보호커버 및 배터리 포함) |
| 대각선 거리 | 320mm(320mm) |
| 치수 | 길이: 442mm, 폭: 388mm, 높이: 174mm (보호커버 제외) |
| 최대 탑재량 | 200g |
| 호버링 비행 시간 | 약 13분(100%로 호버, 0% 미만으로 호버하지 않음), 시각적 위치 지정: 21분 |
| 호버링 정확도 | GPS: 수직 ±1.5m, 수평 ±2.0m |
| 3D LiDAR SLAM: 수직 ±0.08m, 수평 ±0.08m | |
| 4카메라 시각 SLAM: 수직 ±0.05m, 수평 ±0.05m | |
| 바람 저항 수준 | 레벨 4 |
| 작동 온도 | -10°C ~ 40°C |
| 메인 MCU 칩 | STM32H743 |
| 아이무 | ICM42688/BMI088 |
| 기압계 | MS5611 |
| 나침반 | QMC5883L |
| 인터페이스 | USB 타입-C |
온보드 컴퓨터
| 매개변수 | 설명 |
|---|---|
| 프로세서 | 인텔 코어 i5-8365U |
| 메모리 용량 | 8기가바이트 |
| 메모리 주파수 | LPDDR3@2133MHz |
| 저장 | 256GB NVMe SSD |
| 네트워크 포트 | 바이두 아폴로 이더넷 X2, 12V@3A power 공급, IEEE 1588-2008(PTP v2) 지원 |
| 직렬 포트 | TTL 직렬 포트 X2, 5V/3.3V@500mA power 공급 |
| USB | Type-C X2(1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
전원 배터리
| 매개변수 | 설명 |
|---|---|
| 모델 | SU17-L |
| 배터리 유형 | 고압 리튬폴리머 배터리 |
| 정격 전압 | 26.4V(최대), 21V(최소) |
| 저장 전압 | 22.8V(일반) |
| 정격 용량 | 6000mAh |
| 무게 | 680g |
| 치수 | 길이: 85.2 mm, 너비: 86.5 mm, 높이: 135 mm |
리모컨
| 매개변수 | 설명 |
|---|---|
| 모델 | QE-2 |
| 채널 | 8 |
| 전송 전력 | 18~20dBm |
| 무게 | 294.1g(무게) |
짐벌
| 매개변수 | 설명 |
|---|---|
| 조절 가능한 각도 | -90° ~ 30° (틸트 축) |
| 스트리밍 프로토콜 | RTSP(표준) |
| 인코딩 형식 | H.264 |
| 해결 | 1080P @ 25fps |
| 대각선 FOV (D) | 120° |
| 수직 FOV(V) | 54° |
| 수평 FOV (H) | 95° |
이미지 전송
| 매개변수 | 설명 |
|---|---|
| 작동 주파수 | 2.4GHz |
| 전송 전력 | 18dBm |
| 통신 범위 | 3Km (방해 없음, 장애물 없음) |
| 이미지 범위 | 1Km (최소한의 간섭, 장애물 없음) |
| 최대 대역폭 | 40Mbps |
4중 깊이 카메라
| 매개변수 | 설명 |
|---|---|
| 비전 가속기 | 인텔 모비디우스 미리어드 X VPU |
| 최대 해상도 | 1296x816 |
| 최대 프레임 속도 | 1280x800 @ 120fps |
| 셔터 유형 | 글로벌 셔터 |
| 인코딩 형식 | 8/10비트 단일 스트림 |
| 시야 | 150° 대각선 FOV, 127.4° 수평 FOV, 79.7° 수직 FOV |
| 센서 수 | 4 (전방 2개 + 후방 2개) |
| 아이무 | 체질량지수(BMI)270 |
위성항법시스템(GNSS)
| 매개변수 | 설명 |
|---|---|
| 수평 정확도 | 1.5m CEP(SBAS 포함) |
| 속도 정확도 | 0.05m/초 |
| 작동 모드 | GPS + 글로나스 + BDS + 갈릴레오 + SBAS + QZSS |
충전기
| 매개변수 | 설명 |
|---|---|
| 모델 | LK150-2640500 |
| AC 입력 전압 | 100V ~ 240V |
| DC 입력 전압 | 26.4V |
| 무게 | 460g |
| 충전 전류 | 5A |
3D 라이다
| 매개변수 | 설명 |
|---|---|
| 모델 | 미드-360 |
| 레이저 파장 | 905nm |
| 측정 범위 | 40m @ 반사율 10% |
| 시야 | 수평 360°, 수직 -7° ~ 52° |
| 최소 범위 | 0.1m |
| 포인트 주파수 | 10Hz(일반) |
| 포인트 출력 | 200,000 포인트/초 |
| 데이터 인터페이스 | 100 BASE-TX 이더넷 |
| 데이터 동기화 | IEEE 1588-2008(PTP v2), GPS |
| 내장 IMU | ICM40609 |
| 전원 공급 전압 | 7~27V |
| 치수 | 65mm(폭) x 65mm(깊이) x 60mm(높이) |
| 무게 | 115g |
| 작동 온도 | -20도 ~ 55도 |
소프트웨어 매개변수
온보드 컴퓨터
| 매개변수 | 설명 |
|---|---|
| 모델 | 인텔 코어 i5-8365U |
| 체계 | 우분투 20.04 |
| 사용자 이름 | 아모브 |
| 비밀번호 | 아모브 |
| 로오스 | 지식인 |
| 오픈 씨비 | 4.7.0 |
| 시각적 위치 시스템 | BSA_SLAM V1 |
프로메테우스 소프트웨어
| 매개변수 | 설명 |
|---|---|
| 버전 | v2.0 |
| PrometheusGroundStation 시스템 | v1.24.11.27 (Wiki 릴리스 기록에 따른 최종 버전) |
세부
SU17 연구 에디션
산업 등급 품질 연구용 드론
- 옵션 3D LiDAR: 매핑, 위치 지정, 탐색 장애물 회피가 가능합니다.
- Prometheus 자율 드론 소프트웨어: 드론 조종을 빠르게 익힐 수 있는 다양한 데모가 제공됩니다.
- 산업용 비행 플랫폼: 안정적이고 개방적이며 연구용 드론 성능의 새로운 표준을 제시합니다.

주요 특징
SU17 연구 드론 개발 플랫폼 (SU17이라고 함)은 비행 컨트롤러, 온보드 컴퓨터, 쿼드 카메라 SLAM 모듈, 클라우드 카메라, 이미지 전송 모듈을 통합하여 고수준 통합을 위한 통합 설계를 채택하여 하드웨어 안정성과 신뢰성을 크게 향상시킵니다. Prometheus 자율 드론 소프트웨어가 장착된 SU17은 다양한 비행 제어 시나리오에 대한 대상 인식, 추적 및 경로 계획과 같은 기능을 지원합니다.
선택적으로 MID-360 3D LiDAR를 통합하고 FAST-LIO 알고리즘과 결합하여 3D LiDAR SLAM을 달성하여 정확한 환경 감지 및 위치 정보를 제공합니다. EGO-Swarm 경로 계획 알고리즘과 페어링하여 복잡한 환경에서 효율적인 실시간 3D 매핑 및 장애물 회피가 가능합니다.




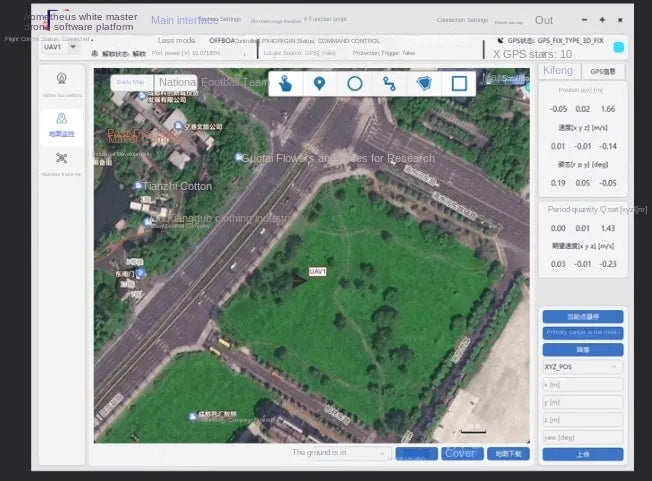
Prometheus V2 소프트웨어 시스템
개발 플랫폼은 ROS 및 Prometheus 오픈 소스 프레임워크를 기반으로 구축되어 효율적인 재프로그래밍을 위한 풍부한 기능과 광범위한 2차 개발 API를 제공합니다. 위치 정보, 비행 모드, 배터리 상태, IMU 데이터 및 기타 드론 상태 및 센서 데이터 인터페이스에 대한 액세스를 제공하며, 위치, 속도, 가속도 및 자세에 대한 제어 인터페이스도 제공합니다.
또한 관련 API에 대한 사용 사례가 포함되어 있습니다. 나아가 드론은 비행 작업(안티-크래시)에 대한 안전 점검 기능을 갖추고 있어 비정상적인 조건에서 자동 하강이 가능하고, 충돌 위험을 줄이며, 보다 안전한 개발 프로세스를 보장합니다.

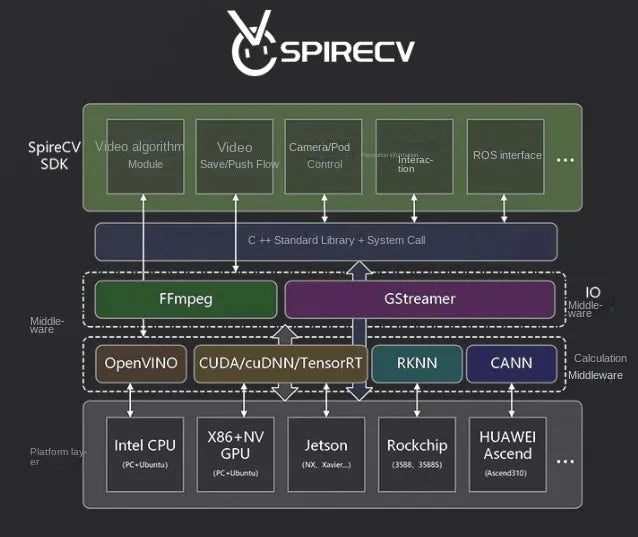
SpireCV 비전 라이브러리
SpireCV Vision Library는 지능형 UAV 시스템을 위해 특별히 설계된 실시간 이미지 처리 SDK입니다. 짐벌 및 카메라 제어, 비디오 저장 및 스트리밍, 대상 감지, 인식 및 추적과 같은 기능을 제공합니다.
이 SDK는 지능형 UAV 시스템 개발자에게 고성능, 안정성 및 간소화된 인터페이스를 제공하는 것을 목표로 합니다. 기능이 풍부한 시각 처리 솔루션을 통해 개발자는 다양한 복잡한 비전 기반 애플리케이션을 효율적으로 구현할 수 있습니다.
프로메테우스 지상국
Prometheus Ground Station은 Qt 기술을 사용하여 구축된 Prometheus 시스템을 기반으로 개발된 인간-드론 상호작용 인터페이스입니다. Prometheus 시스템의 기능을 빠르게 복제하여 드론 상태 및 제어 데이터의 실시간 모니터링과 3D 시각화를 제공합니다.
지상국을 통해 사용자는 원클릭 이륙, 현재 위치에서 호버링, 착륙 및 위치 제어와 같은 명령을 실행할 수 있습니다. 또한, 시스템은 사용자 정의 스크립트를 시작하거나 사용자 정의 메시지를 보내기 위한 사용자 정의 기능 버튼을 지원하여 사용자 작업의 편의성, 효율성 및 확장성을 크게 향상시킵니다.
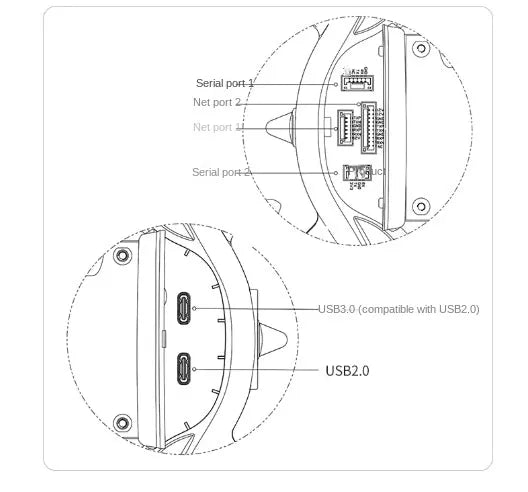
강력한 확장
하드웨어 확장 포트
-
직렬 포트 1
-
직렬 포트 2
-
네트워크 포트 1
-
네트워크 포트 2
-
USB 포트:
- USB 3.0 (USB 2.0과 호환)
- USB 2.0
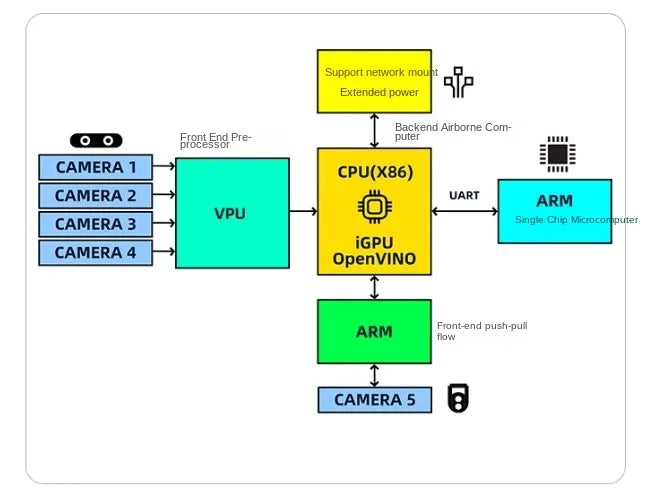
하드웨어 프레임워크
이 이미지는 SU17 드론의 하드웨어 아키텍처를 보여주며 고급 데이터 처리 및 시스템 제어를 위한 다양한 구성 요소의 통합을 강조합니다.
-
카메라(카메라 1~4):
에 연결됨 VPU(Vision Processing Unit) 프런트엔드 전처리를 위해. -
영상:
여러 카메라의 시각적 데이터를 처리하여 처리 장치로 전달합니다. -
CPU(X86) ~와 함께 iGPU와 OpenVINO:
백엔드 처리를 위한 기본 계산 장치 역할을 하며, 향상된 계산 능력을 위한 네트워크 연결 확장 기능을 지원합니다. -
ARM 단일 칩 마이크로 컨트롤러:
추가적인 제어 기능을 위해 UART 인터페이스를 통해 CPU와 상호작용합니다. -
프런트엔드 파이프라인 및 카메라 5:
추가적인 데이터 간소화를 위해 전용 ARM 프로세서로 관리됩니다.
이 프레임워크는 여러 처리 장치를 통합하여 실시간 이미지 분석, 고급 계산 작업 및 하드웨어 구성 요소 간의 원활한 통신을 지원합니다. 연구 및 개발 애플리케이션에서 복잡한 작업을 효율적으로 처리할 수 있도록 보장합니다.
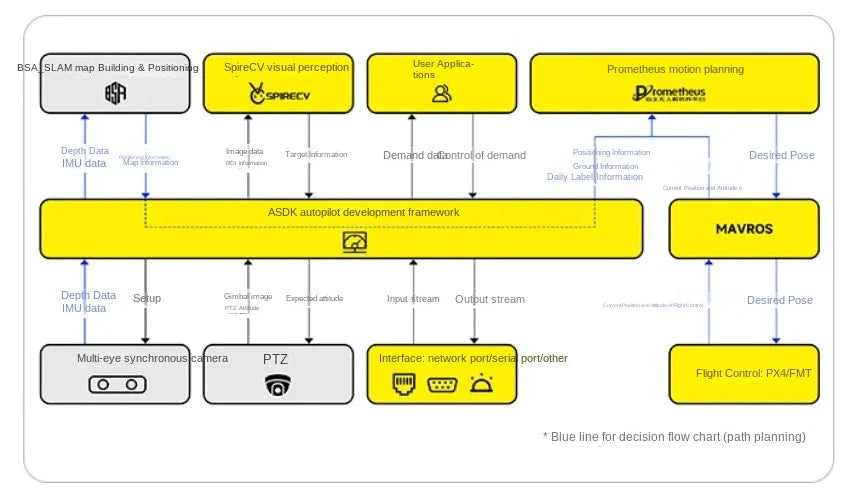
소프트웨어 프레임워크
이 다이어그램은 SU17 드론의 소프트웨어 아키텍처를 보여주며 자율 기능을 위한 다양한 시스템의 통합을 강조합니다.
-
BSA_SLAM(매핑 및 로컬라이제이션):
- 공간 매핑과 위치 데이터를 제공합니다.
- 정확한 환경 인식을 위해 깊이와 IMU 센서 입력을 통합합니다.
-
SpireCV 비전 인식:
- 객체 감지, ROI 정보, 대상 추적을 포함한 시각적 데이터를 처리합니다.
-
사용자 애플리케이션:
- 데이터 시각화, 명령 입력 등 사용자 중심 작업을 위한 인터페이스입니다.
-
프로메테우스 모션 플래닝:
- 위치, 속도, 목표 데이터를 사용하여 궤적 계획을 처리합니다.
-
ASDK 자율 주행 프레임워크:
- 센서, 카메라, 클라우드 모듈, 외부 인터페이스 간의 데이터 흐름을 관리하는 중앙 처리 계층 역할을 합니다.
- 다중 입출력 채널(예: 네트워크 포트, 직렬 포트)을 지원합니다.
-
마브로스:
- 비행 상태 및 위치 제어를 위해 비행 제어 시스템(PX4/FMT)과 통신합니다.
-
클라우드 모듈 및 멀티 싱크 카메라:
- 고급 처리를 위해 클라우드 기반 데이터를 통합합니다.
- 고정밀 작업을 위해 시각적 입력을 동기화합니다.
블루 라인: 경로 계획을 위한 의사결정 경로를 나타냅니다.
이 아키텍처는 모듈식, 확장 가능한 디자인을 보여주며, 견고한 드론 작동을 위한 다양한 하드웨어 및 소프트웨어 구성 요소 간의 원활한 통신을 가능하게 합니다.
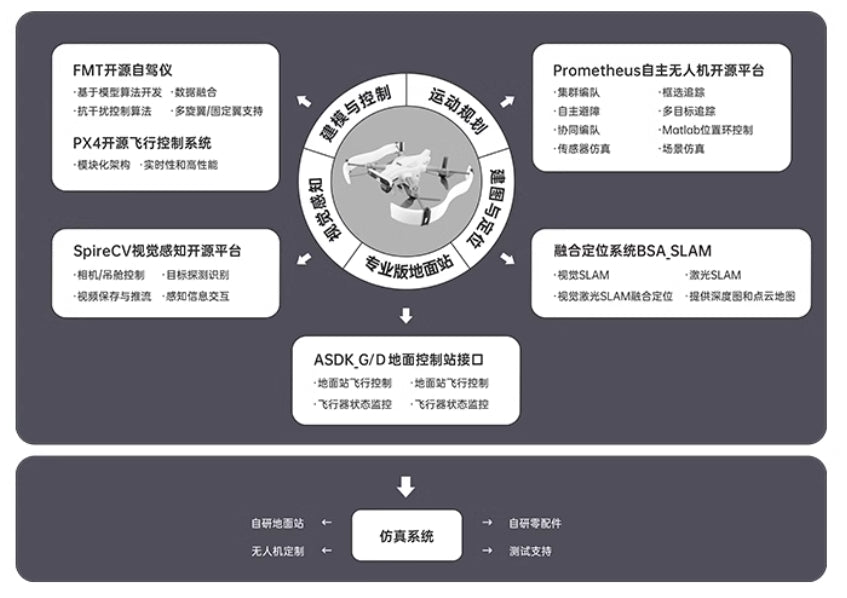
지능형 개방성: 통합 UAV 시스템 솔루션
다이어그램은 다양한 구성 요소 간의 모듈성과 통합을 강조하여 드론 시스템을 위한 포괄적이고 개방적인 아키텍처를 보여줍니다.
-
핵심 구성 요소:
- FMT 오픈소스 오토파일럿: 모듈형 개발을 기반으로 안정적인 비행 제어를 제공하며, 다양한 환경과 데이터 통합을 지원합니다.
- PX4 비행 제어 시스템: 안정성을 보장하고 고급 모듈식 사용자 정의를 지원합니다.
- SpireCV 비전 인식 플랫폼: 객체 감지, 추적, 실시간 비디오 스트리밍을 포함한 이미지 처리에 중점을 둡니다.
-
주요 프레임워크:
- Prometheus 자율 UAV 플랫폼: 다중 드론 제어, 모션 계획, 협업 탐색 및 실제 시뮬레이션이 포함되어 있습니다.
- BSA_SLAM 시스템: 비전 기반 SLAM과 LiDAR 기반 SLAM을 결합하여 정확한 위치 지정 및 매핑을 제공합니다.
- ASDK G/D 지상국 제어 인터페이스: 지상국과 UAV 간의 원활한 통신을 통해 모니터링과 실시간 조정이 가능합니다.
-
워크플로 통합:
- 동작 계획, 환경 매핑, 자율 주행과 같은 프로세스를 강조합니다.
- 전문 지상국과 통합하여 경로 제어, 장애물 회피, 실시간 데이터 관리를 실현합니다.
-
시뮬레이션 지원:
- 자율 임무 테스트, UAV 제어, 구성 요소 검증을 위한 시뮬레이션 시스템이 포함되어 있습니다.
이 시스템은 다양한 시나리오에서 연구, 응용 및 테스트를 위한 확장 가능한 기능을 갖춘 자율형 UAV 개발을 위한 최첨단 솔루션을 보여줍니다.
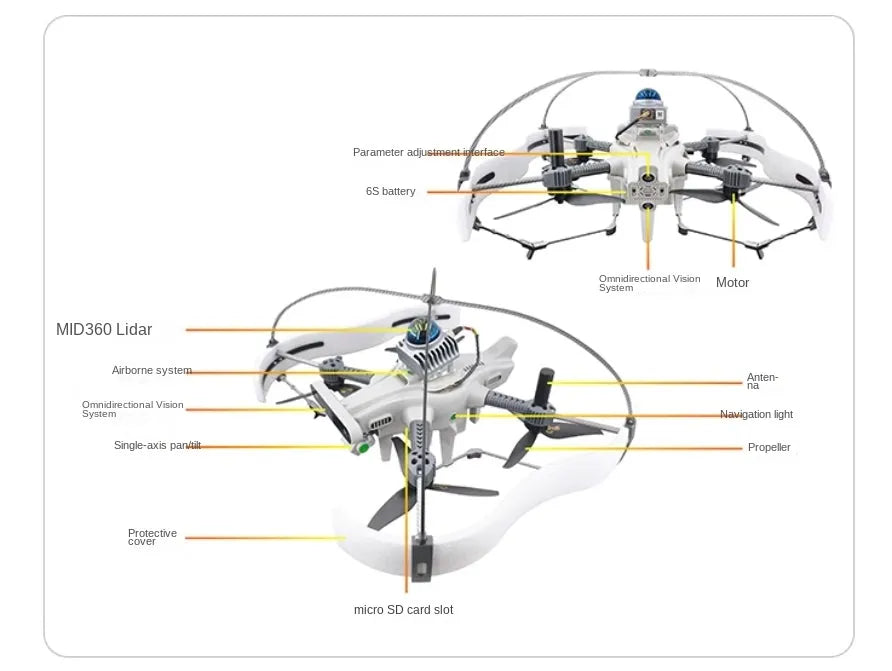
SU17 연구용 드론의 구조적 구성 요소는 안정성과 고급 디자인을 강조합니다. 주요 기능은 다음과 같습니다. MID360 라이다 정확한 매핑을 위해 전방위 비전 시스템 종합적인 환경 인식을 위해 단일 축 짐벌 안정된 이미징과 견고한 6S 배터리 확장된 전원을 위해. 기타 필수 구성 요소에는 다음이 포함됩니다. 프로펠러 시스템, 안테나, 항해등, 그리고 마이크로 SD 카드 슬롯 데이터 저장을 위해. 이 디자인은 최첨단 하드웨어를 통합하여 다양한 연구 애플리케이션에 대한 신뢰성과 고성능을 보장합니다.