Ti5 로봇 쿨 핸드 로봇 핸드, 6자유도, RS485 또는 블루투스, 480g, DC12V, 손가락 10N, 엄지 12N
Ti5 로봇 쿨 핸드 로봇 핸드, 6자유도, RS485 또는 블루투스, 480g, DC12V, 손가락 10N, 엄지 12N
Ti5 Robot
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
Ti5 ROBOT Cool Hand는 왼쪽 및 오른쪽 변형(TH-RH-1-L/R 및 TH-RH-1-L/R-BT)으로 제공되는 컴팩트한 로봇 손입니다. 독립적인 손가락 움직임과 양방향 엄지 메커니즘을 갖춘 6자유도 기능을 제공합니다. 이 손은 DC12V±10% 전원으로 작동하며, RS485 제어를 지원하고(RS485+Bluetooth 옵션 포함), 네 개의 손가락에서 10N의 힘을, 엄지에서 최대 12N의 힘을 제공하며, 무게는 480g입니다.
주요 특징
- 각 손가락의 독립적인 움직임과 양방향 엄지 움직임을 가능하게 하는 6개의 액추에이터 유닛.
- 엄지 수평 회전 범위: 90°.
- 측면 손가락 스윙 속도: 0-6000 (보폭/초) 90°에서 1024 보폭 해상도로.
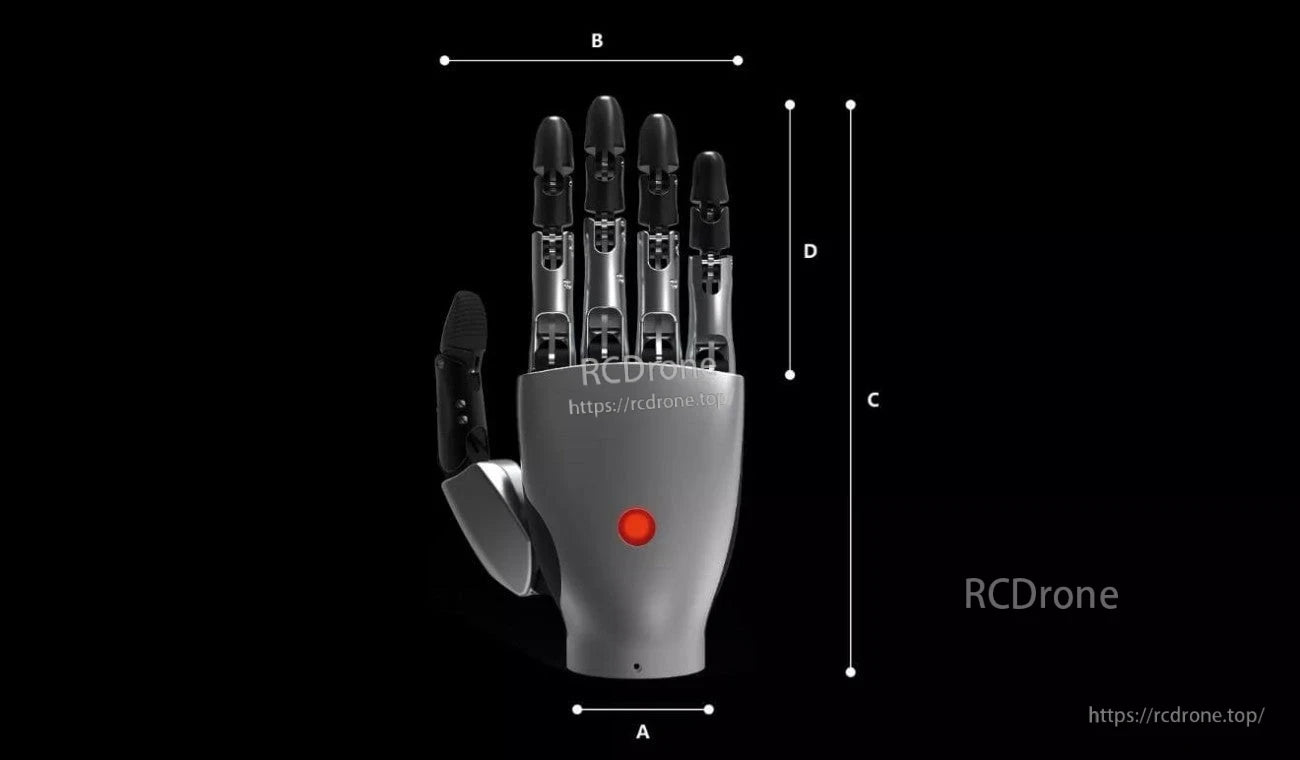
- 컴팩트한 치수: 손바닥 80mm; 최대 손 폭 132mm; 손 길이 205mm; 손가락 길이 97mm.
- 제어 인터페이스: RS485 (TH-RH-1-L/R) 또는 RS485+Bluetooth (TH-RH-1-L/R-BT).
기술 지원, 주문 문의 또는 OEM 질문이 있는 경우 https://rcdrone.top/에 연락하시거나 [email protected]로 이메일을 보내주십시오.
사양
| 매개변수 | TH-RH-1-L/R | TH-RH-1-L/R-BT |
|---|---|---|
| 왼손과 오른손 | 왼쪽 / 오른쪽 | 왼쪽 / 오른쪽 |
| 손바닥 | 80mm | 80mm |
| 손의 최대 너비 | 132mm | 132mm |
| 손의 길이 | 205mm | 205mm |
| 손가락의 길이 | 97mm | 97mm |
| 손가락 끝 힘 (네 개의 손가락 각각) | 10N | 10N |
| 엄지 힘의 최대값 | 12N | 12N |
| 자유도 | 6 | 6 |
| 무게 | 480g | 480g | 작동 전압 | DC12V±10% | DC12V±10% |
| 대기 전류 | 200mA | 200mA |
| 최대 전류 | 3A | 3A |
| 관절 수 | 5 | 5 |
| 제어 인터페이스 | RS485 | RS485+Bluetooth |
| 엄지의 수평 회전 범위 | 90° | 90° |
| 손가락의 측면 스윙 속도 | 0-6000 (페이스/초), 90°, 1024 페이스 | 0-6000 (페이스/초), 90°, 1024 페이스 |
매뉴얼
RobotHand_6D_OF_left.stp | RobotHand_6D_OF_right.stp
Palm_size_chart.pdf | TI5HAND_485_Software_Instruction.pdf | TI5HAND_CAN_소프트웨어_설명서 | 로봇핸드-6DOF_치수_도면.pdf | Palm_size_chart_for_right_hand_reference.pdf
상세정보

Ti5 로봇의 쿨 핸드는 생체공학, 전자공학, 재료 과학 및 체감 기술을 결합하여 유연한 구동 및 협동 제어로 인간과 같은 손재주와 지능적인 작동을 제공합니다.

스마트 액추에이터, 독립 IP, 빠른 신호 응답, 다관절 제어로 정밀하고 섬세한 작업이 가능합니다. 로봇 응용 프로그램에서 경쟁력 있는 성능과 미적 매력을 위해 설계되었습니다.

T15 로봇 손은 독립적인 손가락을 위한 여섯 개의 액추에이터와 양방향 엄지 움직임을 가지고 있습니다.