



Ti5 로봇 CRA-RI40-52-PRO-XX 통합 로봇 조인트 액추에이터, 하모닉 드라이브, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, 중공축, 단일/이중 인코더(브레이크 옵션)
Ti5 로봇 CRA-RI40-52-PRO-XX 통합 로봇 조인트 액추에이터, 하모닉 드라이브, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, 중공축, 단일/이중 인코더(브레이크 옵션)
Ti5 Robot
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
Ti5 로봇 CRA-RI40-52-PRO-XX는 프레임리스 토크 모터, 정밀 고조파 감속기, 서보 드라이버, 자기 인코더를 하나의 IP65 장치에 결합한 소형 통합 관절 모듈입니다. 24~48V DC 전원과 90W 정격 전력을 제공하여 휴머노이드 로봇, 외골격 로봇, 협동 로봇 팔, 짐벌, AGV 및 기타 고급 애플리케이션에 7N·m의 정격 토크와 80rpm의 정격 출력 속도를 제공합니다. 중앙 패스스루 홀은 케이블 라우팅을 지원하며, 단일 또는 이중 인코더 구성과 홀딩 브레이크 옵션을 제공합니다. 통신은 기본적으로 CAN이며, EtherCAT을 선택할 수 있습니다.
주요 특징
-
통합 모터 + 드라이브 + 고조파 감속기 + 인코더(자기)
-
정격 토크 7 N·m; 정격 출력 속도 80 rpm; 90 W 전력
-
두 가지 감소 비율: 51:1 또는 101:1
-
고정밀: 17비트 인코더, 일반적인 백래시 40초각(51)/30초각(101)
-
저소음, 저코깅, 고토크 밀도 설계
-
IP65 보호; 선택 가능한 저온 & 방수 맞춤형
-
통신 버스: CAN(표준) 또는 EtherCAT(옵션)
-
단일/이중 인코더 옵션, 브레이크 또는 비브레이크 버전
-
배선용 관통 구멍 : 12mm(표준)/11mm(브레이크)
-
일반적인 응용 분야: 휴머노이드, 협동 로봇 관절, 외골격, 팬틸트, 산업 장비, 전력 검사 로봇, 해양/차량 시스템
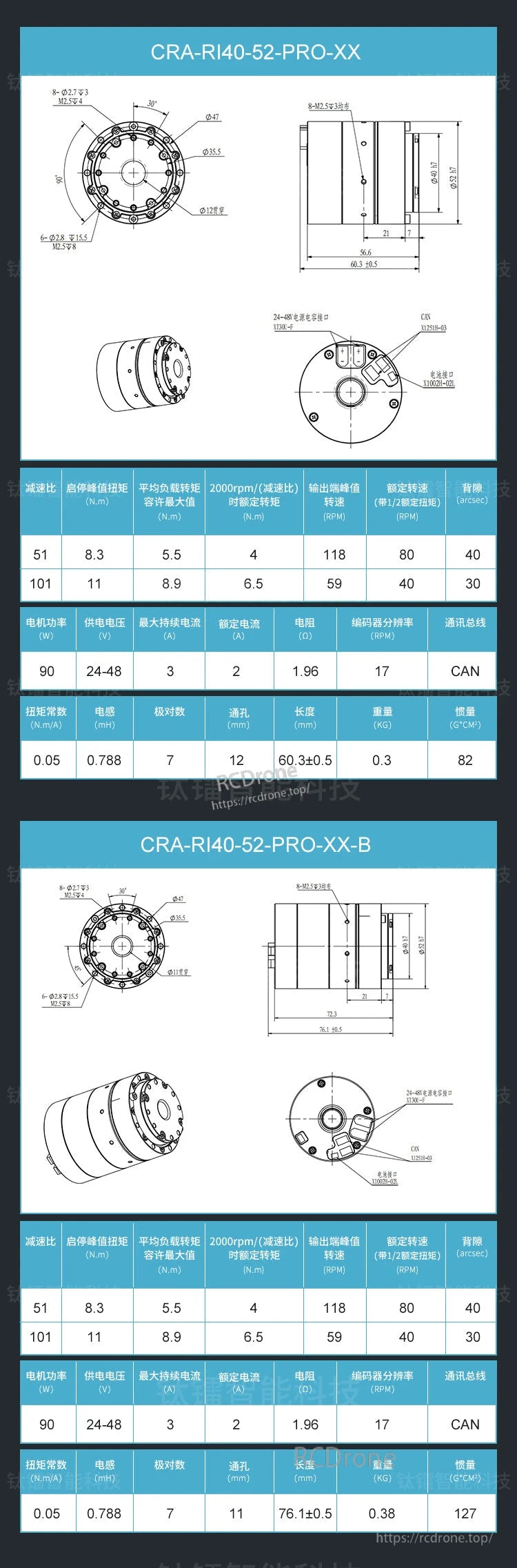
기어비에 따른 성능
| 목 | 51:1 | 101:1 |
|---|---|---|
| 시동/정지 최대 토크(N·m) | 8.3 | 11 |
| 최대 허용 평균 부하 토크(N·m) | 5.5 | 8.9 |
| 정격 토크 @ 2000 rpm/(비율) (N·m) | 4 | 6.5 |
| 최대 출력 속도(rpm) | 118 | 59 |
| 정격 속도 @ ½ 정격 토크(rpm) | 80 | 80 |
| 백래시(각초) | 40 | 30 |
전기 사양
-
공급 전압: 24~48V 직류
-
정격/연속 전류: 2A (최대 연속 3A)
-
위상 저항: 1.96Ω
-
인덕턴스: 0.788mH
-
토크 상수: 0.05 N·m/A
-
극 쌍: 7
-
인코더 해상도: 17비트 (자기)
기계적인 &앰프; 인터페이스
-
보호 등급: IP65
-
정격 출력 속도: 80rpm
-
의사소통: 할 수 있다 (기본)/이더캣 (옵션)
-
통과 구멍(배선용): Ø12mm (기준)/Ø11mm (브레이크 포함)
-
길이 &앰프; 관성(브레이크 없음): 60.3 ± 0.5mm, 82g·cm²
-
길이 &앰프; 관성(-B 브레이크 버전): 76.1 ± 0.5mm, 127g·cm²
-
대량의: 0.3kg
-
케이블 길이: 5m
-
작동 주변 온도(일반): 최대 60°C
-
재료: 정밀 고조파 감소기가 있는 알루미늄 구성품
변형 &앰프; 옵션
-
의사소통: CAN 또는 EtherCAT
-
인코더: 단일 또는 이중 자기 인코더
-
브레이크: 비브레이크(표준) 또는 -비 홀딩 브레이크 버전
-
환경: 맞춤형 방수 및 저온 패키지
-
급수 표기법: CRA-PIXX-XX-(프로)-XX-(B, T, 2E, IPXX) (감속기, 토크 센서/인코더 개수, 비율, 보호 등을 나타냄)
일반적인 응용 분야
인간형 관절(어깨/팔꿈치/엉덩이/무릎), 협동 로봇 팔, 외골격 액추에이터, 팬틸트/비전 짐벌, 산업 자동화 축, 전력 검사 UGV/AGV, 해양/차량 보조 메커니즘.
노트
-
도면에 표시된 지정된 나사 패턴과 허용 오차를 사용하여 설치하세요.
-
주문하기 전에 비율, 인코더 구성, 통신 버스 및 브레이크 요구 사항을 확인하세요.
-
이 제품의 산업적 특성으로 인해 설치/사용된 제품은 일반적으로 반품이 불가능합니다. 구매하기 전에 기술 담당자에게 사이즈 문서를 문의하세요.
세부
Ti5 로봇 관절 액추에이터 CRA-R140-52-PRO-XX 및 -B는 90W 전력, 24~48V 공급, 최대 3A 전류, 17RPM 인코더 분해능, 토크, 속도 및 CAN 통신을 제공합니다.

Ti5 로봇 관절 액추에이터 모델 CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX)에는 브레이크, 토크 센서, 듀얼 엔코더, 방수 등급, 감속비, 외경 및 모터 유형이 포함됩니다.

휴머노이드 로봇, 외골격 로봇, 협동 로봇, 자동차, 무인운반차(AGV)용 PRO 시리즈 관절 액추에이터. 특징: 높은 견고성, 긴 수명, 높은 토크 밀도, 낮은 코깅 토크, 방수, 방진, 방폭, 저소음, 고정밀, 중공축 설계.



