Ti5 로봇 CRA-RI60-80-PRO-XX 통합 로봇 조인트 모듈 - 고조파 드라이브, 24~48V, CAN/EtherCAT, 17비트 인코더
Ti5 로봇 CRA-RI60-80-PRO-XX 통합 로봇 조인트 모듈 - 고조파 드라이브, 24~48V, CAN/EtherCAT, 17비트 인코더
Ti5 Robot
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
Ti5 로봇 CRA-RI60-80-PRO-XX 휴머노이드, 코봇, 모바일 매니퓰레이터를 위한 소형 중공축 통합 조인트입니다. 초박형 고조파 감속기, 프레임리스 토크 모터, FOC 서보 드라이브, 그리고 절대 자기 인코더 하나의 모듈로 제공 거의 0에 가까운 백래시 출력, 저소음, 높은 토크 밀도를 제공합니다. 조인트는 할 수 있다 또는 이더캣, 단일 또는 이중 인코더, 그리고 옵션 홀딩 브레이크. 두 가지 길이가 제공됩니다: 표준 PRO-XX 및 확장형 프로-XX-B (더 긴 본체, 더 높은 로터 관성, 더 큰 관통 구멍).
주요 특징
-
올인원 조인트: 고조파 감속기 + 토크 모터 + FOC 드라이버 + 절대 엔코더.
-
거의 0에 가까운 반발 출력에서 부드러운 저속 제어와 낮은 음향 소음이 특징입니다.
-
중공축 설계 케이블/항공로 통과용, 다중 감소 비율.
-
절대 인코더, 17비트, 전력 손실 위치 메모리; 선택 사항 듀얼 인코더 버전.
-
의사소통: 할 수 있다 또는 이더캣 선택 가능.
-
힘: 24~48V, 통합 드라이버, 300W 모터 전력 등급.
-
옵션 홀딩 브레이크; IP/방수 &앰프; 저온 맞춤형 제작이 가능합니다.
-
신청 준비 완료 짐벌, 휴머노이드, 코봇, 산업 장비, 순찰 로봇, 해양 장비 등에 사용됩니다.
명세서
전기 같은 & Control (PRO-XX/PRO-XX-B와 공유)
-
정격 모터 전력: 300와트
-
공급 전압: 24~48V 직류
-
최대 연속 전류: 6.7A; 정격 전류: 5A
-
위상 저항: 0.33Ω
-
토크 상수: 0.096 N·m/A
-
인덕턴스: 0.074mH
-
극 쌍: 10
-
인코더: 17비트 절대; 단일/이중 인코더 옵션
-
버스: 할 수 있다 (표준) 또는 이더캣 (옵션)
기계식(중공축)
-
관통 구멍(PRO-XX): Ø15mm
-
관통 구멍(PRO-XX-B): Ø18mm
-
길이(PRO-XX): 70.4 ± 0.5mm; 무게 약 1.01kg; 로터 관성 약 441g·cm²
-
길이(PRO-XX-B): 92.9 ± 0.5mm; 무게 약 1.17kg; 로터 관성 약 595g·cm²
-
장착: 전면 볼트 원(중공 출력); 고조파 감속기 통합
-
옵션: 홀딩 브레이크; 싱글/듀얼 엔코더; CAN/EtherCAT; 방수 &앰프; 저온 패키지
리듀서 옵션 &앰프; 성능(출력 측)
백래시: 최저 10~20초각 비율에 따라 다릅니다.
| 감소율 | 시동/정지 최대 토크(N·m) | 최대 평균 부하 토크(N·m) | 2000rpm/ratio에서의 정격 토크(N·m) | 최고 속도(rpm) | 정격 속도 @ ½ 정격 토크(rpm) | 백래시(각초) |
|---|---|---|---|---|---|---|
| 51:1 | 42 | 32 | 19.8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27.5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 30 | 41 | 34 | 10 |
| 121:1 | 66 | 49 | 30 | 32 | 24 | 10 |
참고사항:
• 위의 데이터는 CRA-RI60-80-PRO-XX 및 제품 시트에서 읽습니다. 프로-XX-B.
• PRO-XX-B는 동일한 토크/속도 표를 공유합니다. 즉, 더 긴 본체로 더 큰 관통 구멍과 더 높은 관성을 제공합니다.
응용 프로그램
-
휴머노이드 &앰프; 서비스 로봇: 토크 밀도가 높은 어깨, 팔꿈치, 엉덩이, 무릎, 발목 관절.
-
협동 로봇 팔: 원활한 힘 제어를 위한 정밀한 낮은 백래시 축.
-
짐발 &앰프; 팬틸트 유닛: 절대 위치 메모리를 통한 조용하고 안정적인 저속 추적.
-
산업 장비 &앰프; AGV/AMR 조작기: 좁은 공간에 적합한 컴팩트한 통합 작동 방식.
-
전력 순찰 및 검사 로봇; 해양/선박 장치 (방수 옵션 포함).
세부
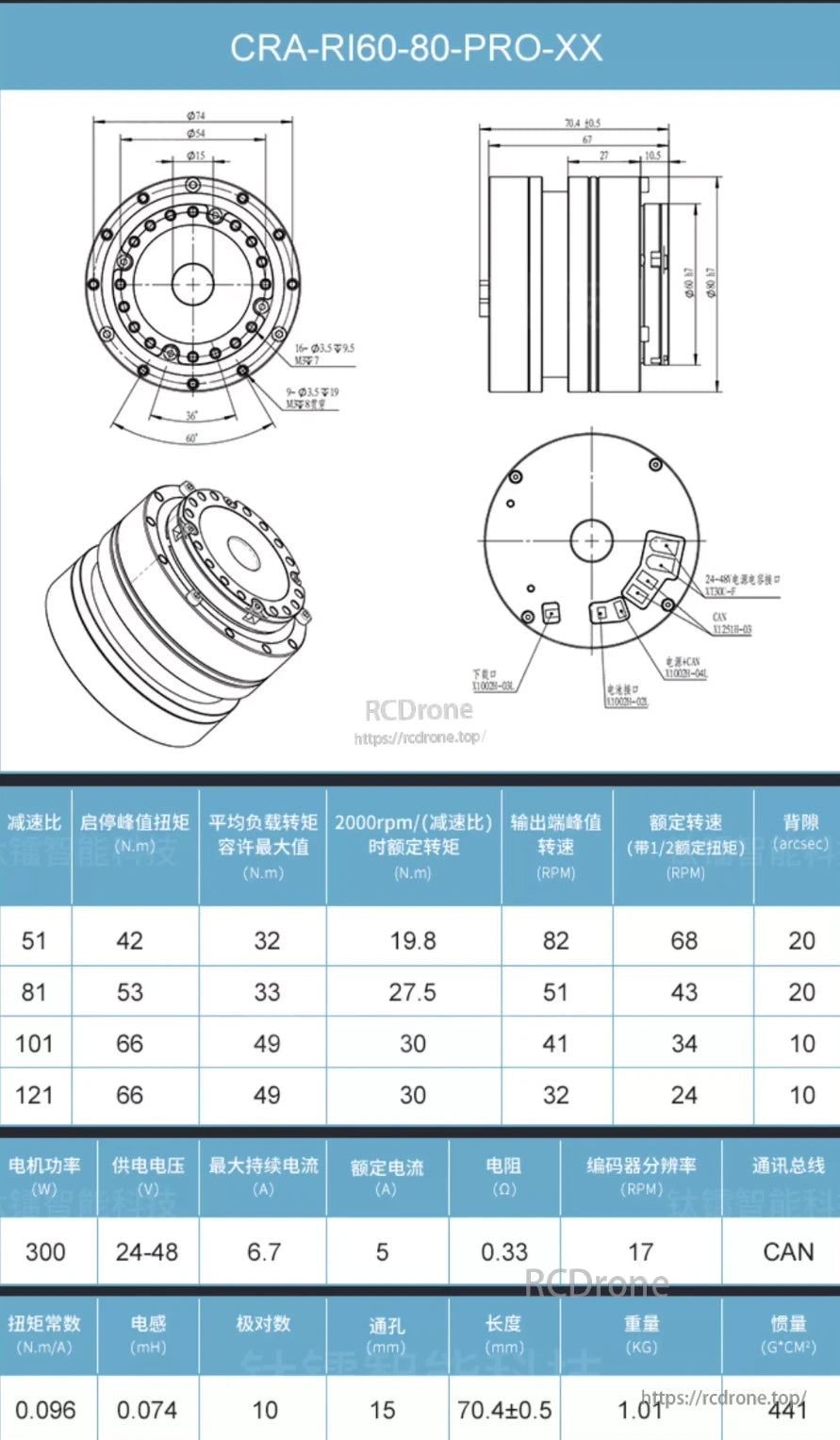
CRA-RI60-80-PRO-XX 로봇 관절 모듈 사양: 300W 모터, 24-48V 입력, CAN 버스, 17 CPR 인코더, 길이 70.4mm, 무게 1.01kg, 토크 및 속도 데이터가 제공되는 다중 기어비.
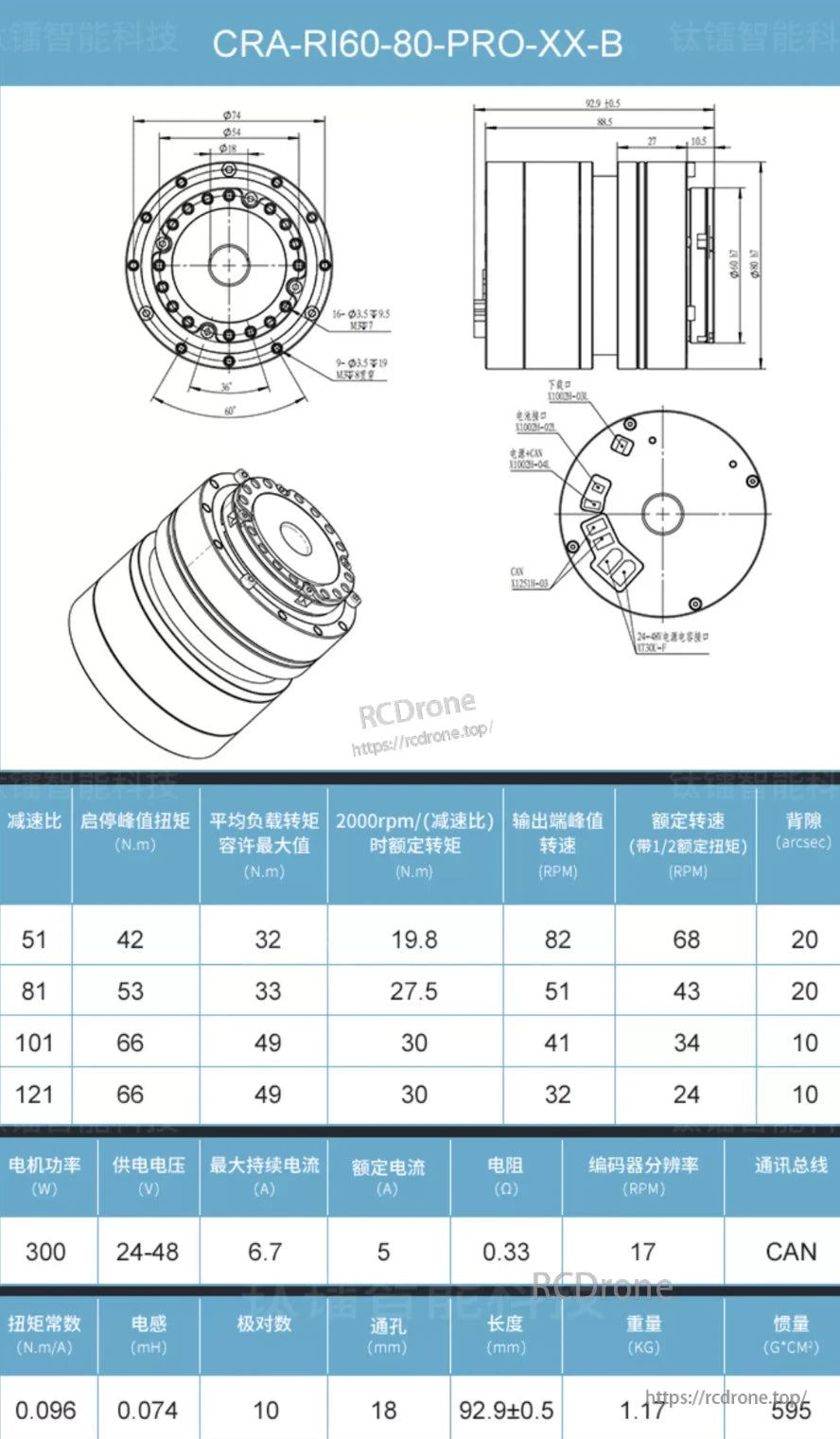
CRA-RI60-80-PRO-XX-B 로봇 관절 모듈은 300W 모터, 24-48V 전원 공급, CAN 통신, 17RPM 인코더 분해능, 그리고 다양한 기어비를 제공합니다. 주요 사양은 토크, 속도, 전류 및 크기입니다.