


TLIBOT TSJA17 - 하모닉 50/80/100/120, 20-31 Nm, 48 V, 3000 RPM, EtherCAT/CAN - 로봇 관절용 로봇 모터
TLIBOT TSJA17 - 하모닉 50/80/100/120, 20-31 Nm, 48 V, 3000 RPM, EtherCAT/CAN - 로봇 관절용 로봇 모터
TLIBOT
정가
$1,125.00 USD
정가
할인가
$1,125.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
TLIBOT TSJA17은 하모닉 드라이브 조인트, 고해상도 절대 인코더, 필드버스 인터페이스 및 정밀한 로봇 동작을 위한 전자기 브레이크를 통합한 컴팩트 로봇 모터입니다. 여러 하모닉 감속비를 지원하며 경량 로봇 메커니즘 및 협동 로봇을 위한 높은 토크 밀도를 제공합니다.
주요 특징
- 하모닉 감속비 옵션: 50 / 80 / 100 / 120.
- 정격 토크: 20 / 28 / 31 / 31 Nm; 시작/정지 시 피크 토크: 44 / 56 / 70 / 70 Nm.
- 최대 허용 평균 하중 토크: 34 / 35 / 51 / 51 Nm; 순간 허용 최대 토크: 91 / 113 / 143 / 112 Nm.
- 출력 끝에서의 최대 회전 속도: 60 / 37.5 / 30 / 25 RPM.
- 모터 정격 속도: 3000 RPM; 피크 순간 모터 속도: 4500 RPM.
- 정격 전압: 48 V; 무게: 0.68 kg.
- 인코더: 출력에서 19비트 단일 회전 절대형 (배터리 없음); 입력에서 19비트 ST 절대형 (출력을 통한 다회전, 배터리 없음).
- 필드버스 옵션: EtherCAT / CAN / CAN FD.
- 통합 기어 맞물림 전자기 브레이크.
- 제품 이미지에 따르면: IP54 등급의 조인트 구조로 연속 360° 회전 가능; 5–10 kg 하중, 500–1000 mm 도달 범위 클래스의 경량 팔에 적합.
- 쉘 통합을 위한 축 방향 장착 방법이 설명되어 있습니다 (설치 문서 참조).
사전 판매 또는 기술 지원을 원하시면 https://rcdrone.top/ 또는 [email protected]에 문의하십시오.
사양
| 매개변수 | 값 |
|---|---|
| 고조파 감소 비율 | 50 / 80 / 100 / 120 |
| 정격 토크 (Nm) | 20 / 28 / 31 / 31 |
| 시작 및 정지 시 허용되는 최대 토크 (Nm) | 44 / 56 / 70 / 70 |
| 허용되는 최대 평균 하중 토크 (Nm) | 34 / 35 / 51 / 51 |
| 순간 허용 최대 토크 (Nm) | 91 / 113 / 143 / 112 |
| 출력 단에서의 최대 회전 속도 (RPM) | 60 / 37.5 / 30 / 25 |
| 반복 위치 정확도 | 1' |
| 모터 정격 속도 (RPM) | 3000 |
| 최대 순간 모터 속도 (RPM) | 4500 |
| 모터 정격 전력 | 80 |
| 정격 전압 (V) | 48 |
| 무게 (kg) | 0.68 |
| 출력 인코더 해상도 | 19비트 단일 회전 절대값 (배터리 없음) |
| 입력 인코더 해상도 | 19비트 ST 절대값(multi-turn via output, battery-less) |
| 필드버스 | EtherCAT / CAN / CAN FD |
| 통합 브레이크 | 기어 맞물림 전자기 브레이크 |
응용 프로그램
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 사족 로봇
- AGV 차량
- ARU 로봇
매뉴얼
- ULTRA-LIGHTWEIGHT JOINT MODULE CATALOGUE.pdf
- TSJA17_Installation_Illustration.pdf
- 직렬 통신 Specification.pdf
세부사항
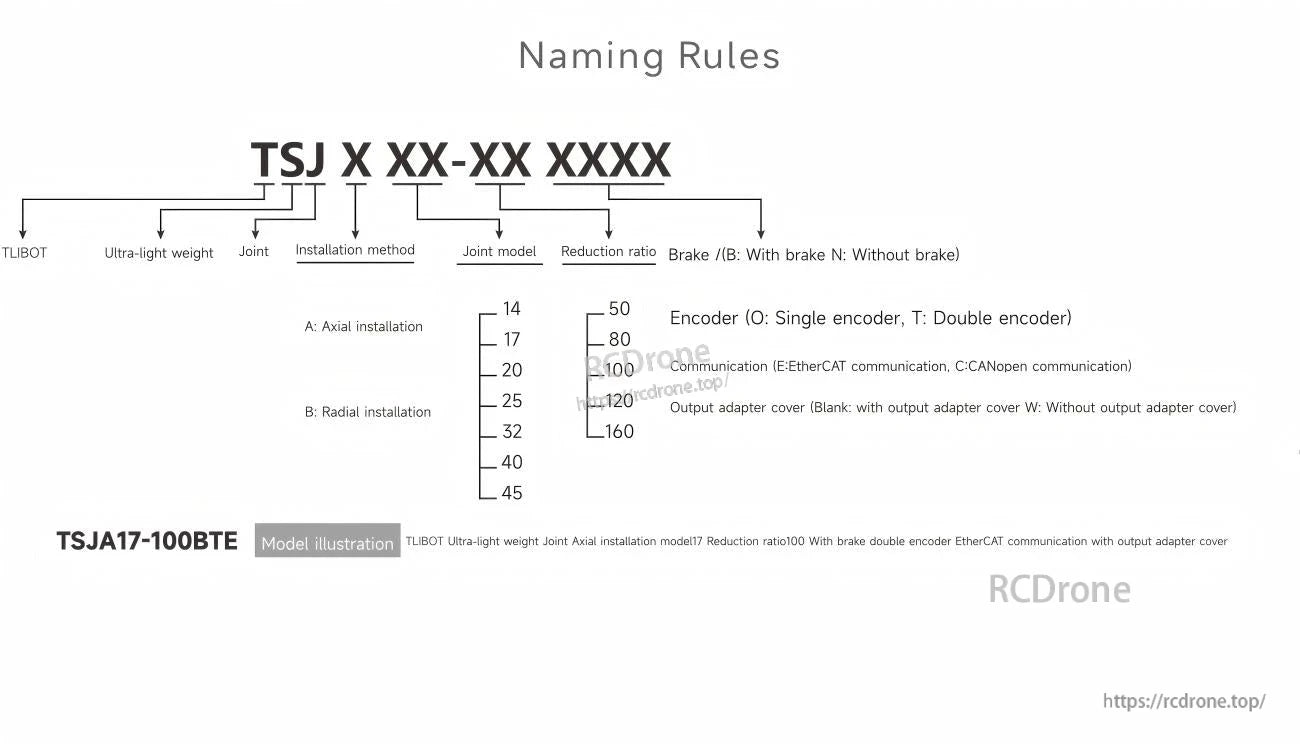
TSJA17-100BTE는 축 방향 설치가 가능한 TLIBOT 초경량 조인트로, 모델 17, 감속비 100, 브레이크 포함, 이중 인코더, EtherCAT 통신 및 출력 어댑터 커버가 포함되어 있습니다.
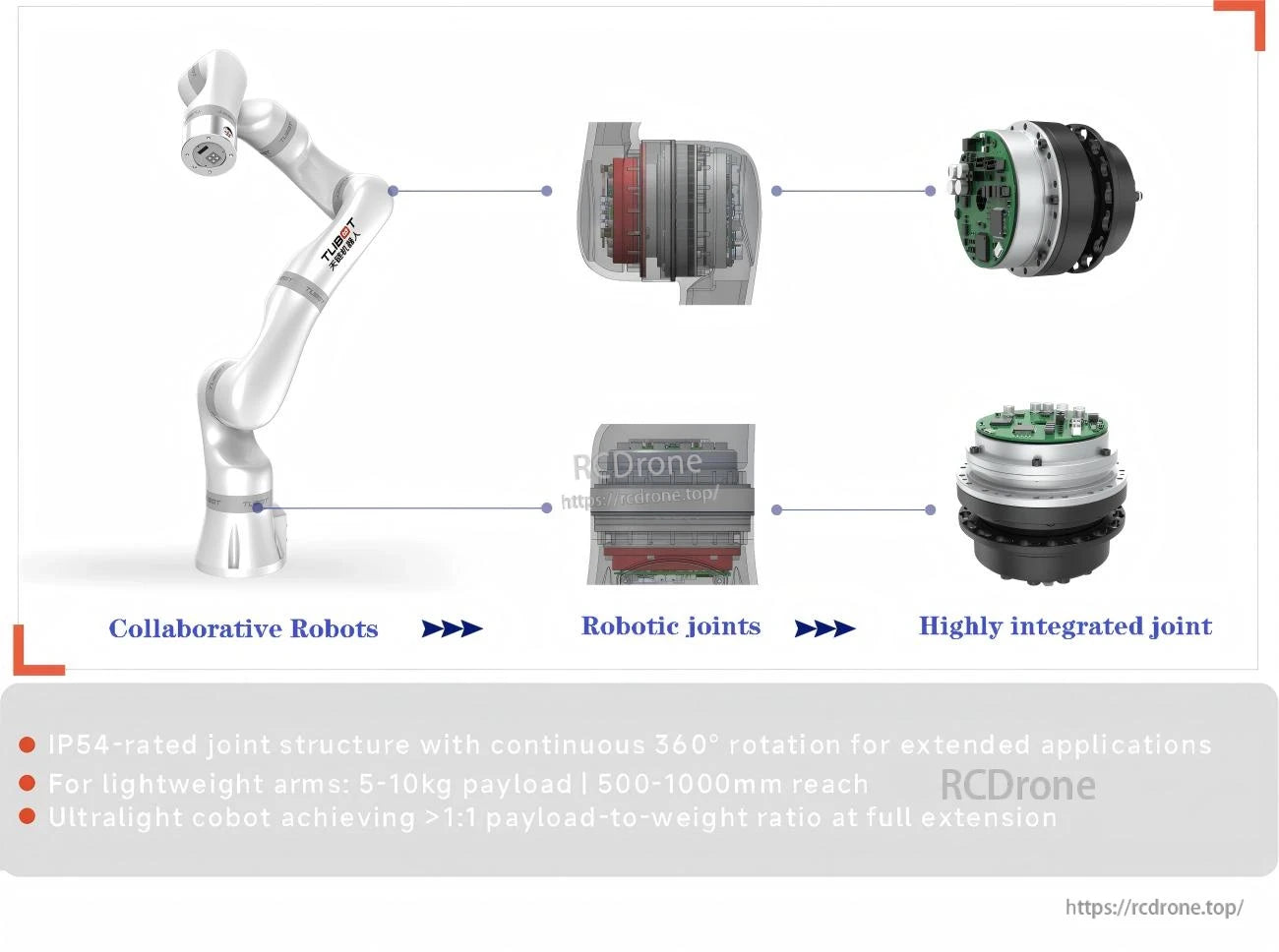
TLIBOT 협동 로봇은 IP54 등급의 관절, 360° 회전, 5-10kg의 하중, 500-1000mm의 도달 거리 및 >1:1 하중 대 중량 비율을 갖추고 있습니다. 경량 팔을 위한 고도로 통합된 관절 설계입니다.
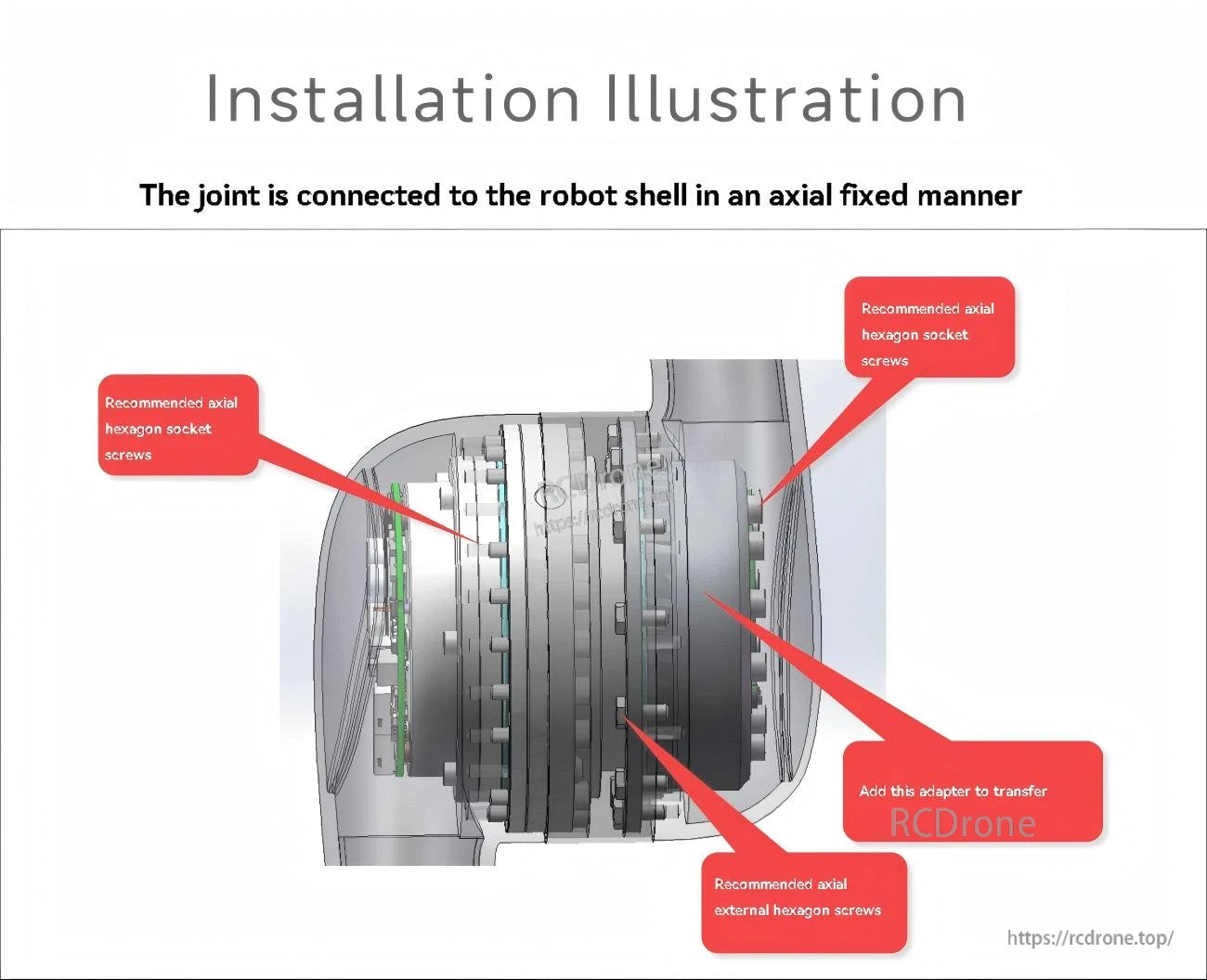
TLIBOT TSJA17 관절 설치 가이드: 축 나사 연결 및 어댑터 사용.


