




UBLOX M10G-5883 GPS 모듈(QMC5883L 나침반 포함) | 10Hz GNSS, 플래시, Betaflight INAV Ardupilot 호환
UBLOX M10G-5883 GPS 모듈(QMC5883L 나침반 포함) | 10Hz GNSS, 플래시, Betaflight INAV Ardupilot 호환
RCDrone
픽업 사용 가능 여부를 로드할 수 없습니다.
UBLOX M10G-5883 GPS 모듈은 최신 u-blox M10 (M10050) 위성 칩셋과 QMC5883L 디지털 나침반을 특징으로 하는 고성능 GNSS 장치로, 뛰어난 위치 정확도, 빠른 수신, 강력한 신호 추적을 제공합니다. GPS, GLONASS, Galileo, BeiDou, QZSS 및 SBAS를 지원하는 이 모듈은 최대 32개의 위성에 잠금을 걸 수 있으며, 최대 10Hz의 속도로 위치 데이터를 출력하여 실제 야외 응용 프로그램에서 센티미터 수준의 정밀도를 제공합니다.
🔧 주요 특징
-
GNSS 칩: UBLOX M10050 (10세대)
-
나침반 센서: QMC5883L 고정밀 디지털 자력계
-
업데이트 속도: 10Hz
-
위성 지원:
-
GPS L1 C/A
-
GLONASS L1OF
-
BeiDou B1I/B1C
-
Galileo E1B/C
-
QZSS L1 C/A/S
-
SBAS L1 C/A
-
-
최대 위성 추적: 32
-
콜드 스타트: ~26초 | 핫 스타트: ~1초
-
위치 정확도: 1.5m CEP (이상적인 환경)
-
감도:
-
추적: -167dBm
-
재획득: -160dBm
-
핫 스타트: -159dBm
-
콜드 스타트: -148dBm
-
-
출력 프로토콜: NMEA, UBX
-
전송 속도: 4800 – 921600 bps (기본값: 38400bps)
-
출력 레벨: 3.3V TTL
📐 하드웨어 사양
| 매개변수 | 값 |
|---|---|
| 치수 | 20 x 20 x 8 mm (GPS 모듈) |
| 세라믹 안테나 | 18 x 18 x 4 mm 수입 세라믹 |
| 무게 | 7g |
| 전압 범위 | 3.6V – 5.5V (일반 5V) |
| 전류 소모 | 35mA @ 5V |
| 커넥터 | SH1.0 6핀, 1.0mm 피치 |
| PPS LED 표시기 | 전원이 켜지면 파란색 ON, 3D 고정 시 깜박임 |
📦 패키지 포함 항목
-
1x UBLOX M10G-5883 GPS 모듈
-
1x SH1.0 6핀 20cm 실리콘 신호 케이블
🔄 변형
-
CX018 플래시 포함, 나침반 없음
-
CX20 플래시 및 IST8310 나침반 포함
-
CX28 플래시 및 IST8310 나침반 포함
-
CX28 플래시 포함, 나침반 없음
🛠️ 소프트웨어 호환성
완전 지원:
-
Betaflight ≥ v4.3.0
-
INAV ≥ v5.0.0
-
Ardupilot ≥ v4.1
-
PX4 “ROTATION_ROLL_180” 구성으로
🔌 핀 배치 구성 (SH1.0 6핀)
| 핀 | 기능 |
|---|---|
| G | GND |
| V | 5V |
| R | RX |
| T | TX |
| C | SCL |
| D | SDA |
RX는 FC TX에 연결되고, TX는 FC RX에 연결됩니다. 모든 I2C 및 UART는 3.3V TTL 수준입니다.
✅ 설치 주의사항
-
나침반을 드론의 코를 향하도록 설치하십시오.
-
구성 사용:
-
베타플라이트: CW 180° 플립
-
아두파일럿: COMPASS_AUTO_ROT = 2
-
PX4 (QGC): ROTATION_ROLL_180
-
🛰️ 이상적인 용도
-
FPV 레이싱 드론
-
시네후프 및 투스픽 쿼드
-
경량 고정익 UAV
-
정확한 GPS 및 자기 방향 데이터가 필요한 전문 멀티로터
이 UBLOX M10G-5883 모듈은 M8N에서 강력한 업그레이드로, 더 빠른 콜드 스타트, 향상된 정확성 및 주류 오픈 소스 비행 스택과의 폭넓은 호환성을 제공합니다.전원이 꺼진 후에도 구성 유지 기능을 지원하여 재부팅 및 비행 컨트롤러 교체 시에도 설정이 지속됩니다.
상세정보
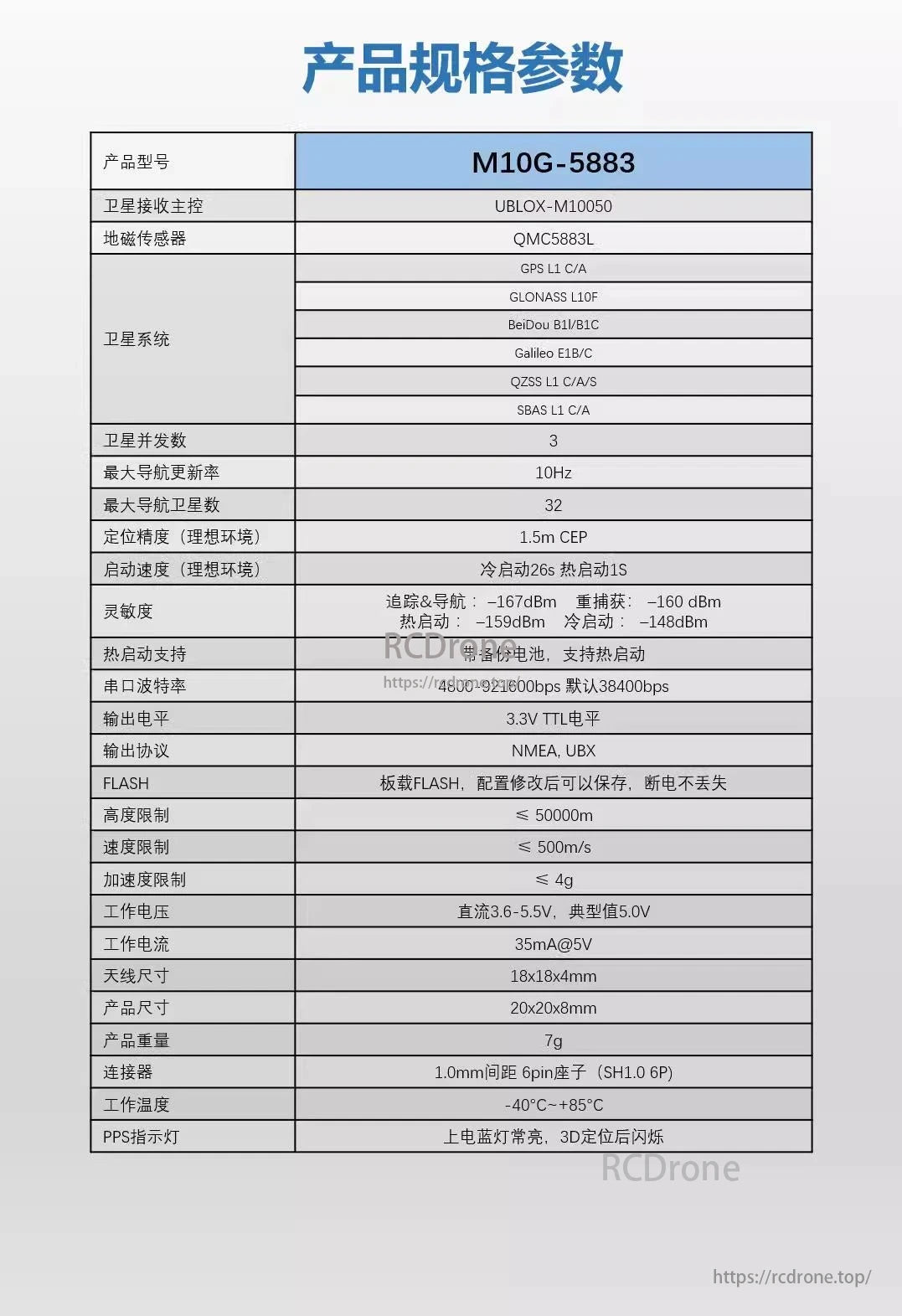
M10G-5883 GPS 모듈은 1.5m CEP 정확도, 10Hz 업데이트 속도, -167dBm 감도, 32채널 추적, 3.3V TTL 출력을 지원하며 -40°C에서 +85°C에서 작동합니다.
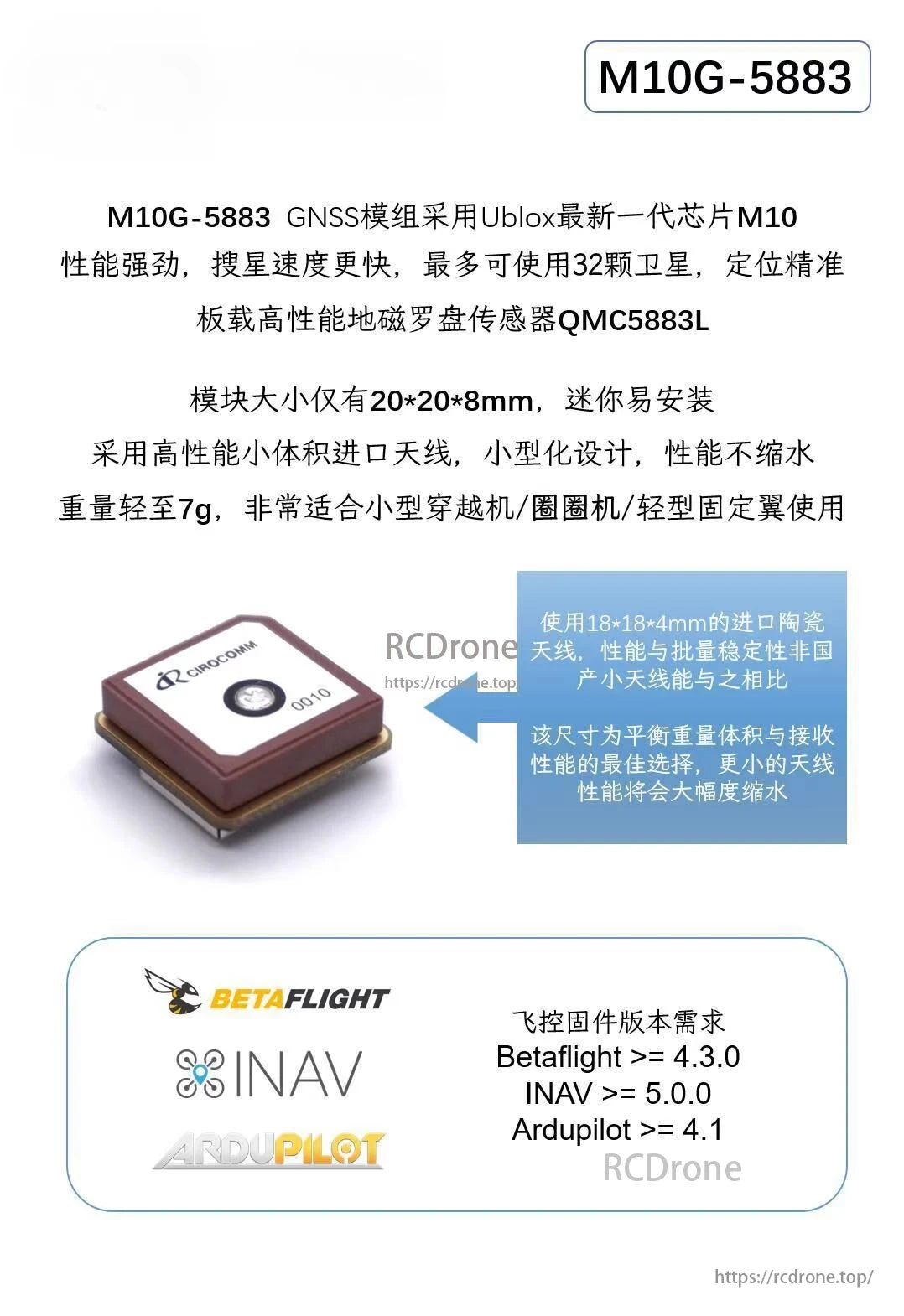
M10G-5883 GNSS 모듈은 Ublox M10 칩을 사용하며, 정밀한 위치 지정을 위해 32개의 위성을 지원합니다. QMC5883L 나침반이 특징이며, 크기는 20x20x8mm로 작고, 무게는 7g으로 소형 드론에 적합합니다. Betaflight >= 4.3.0, INAV >= 5.0.0, Ardupilot >= 4.1이 필요합니다.

M10G-5883 GPS INAV 설정 가이드. GPS를 사용 가능한 직렬 포트에 연결하고, 구성에서 GPS를 활성화한 후 비행 컨트롤러를 재시작합니다. 야외에서 GPS 기능을 확인하십시오.
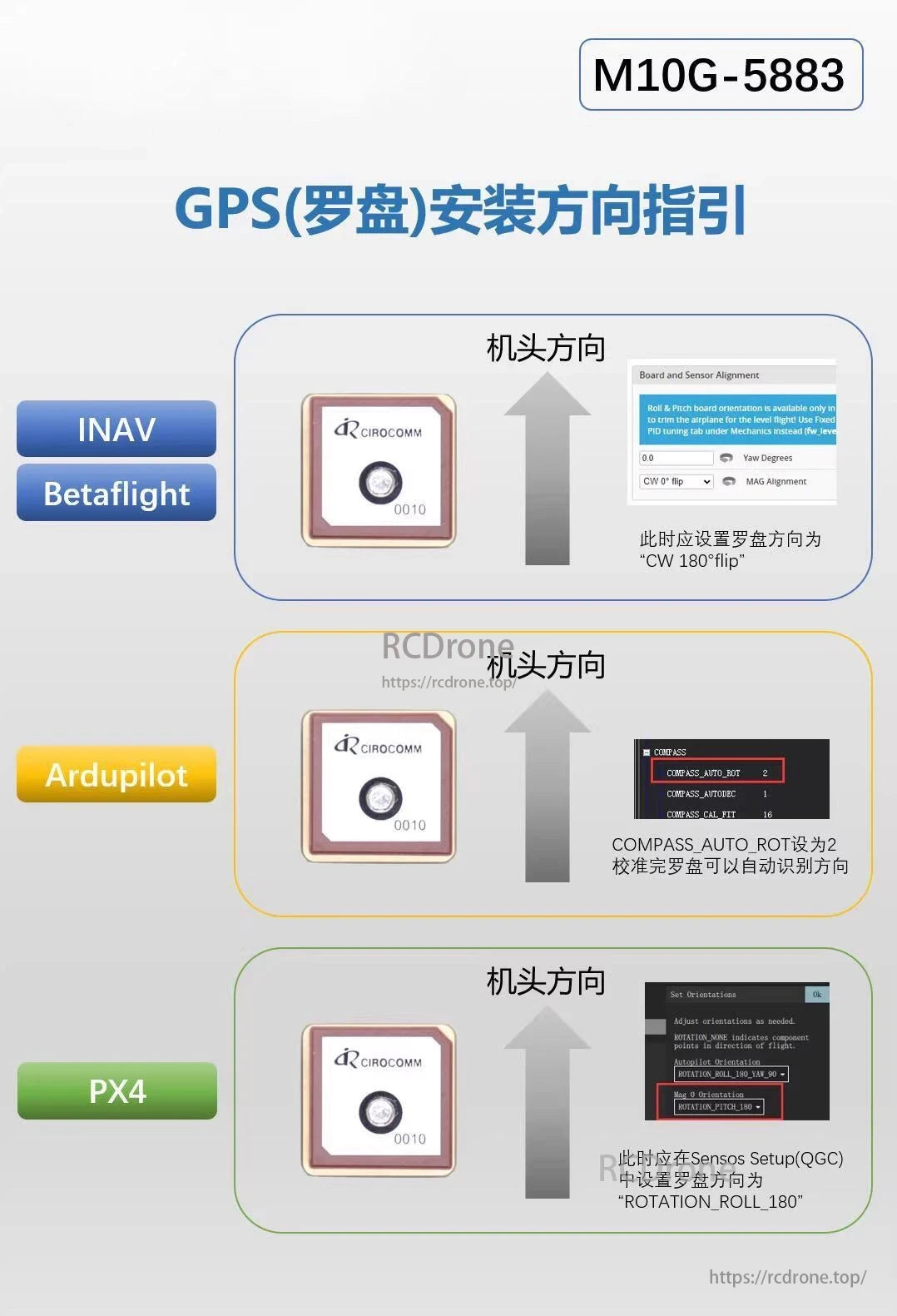
INAV, Betaflight, Ardupilot 및 PX4용 GPS 설치 가이드. 드론의 최적 방향 및 기능을 위한 나침반 정렬 설정을 다룹니다.
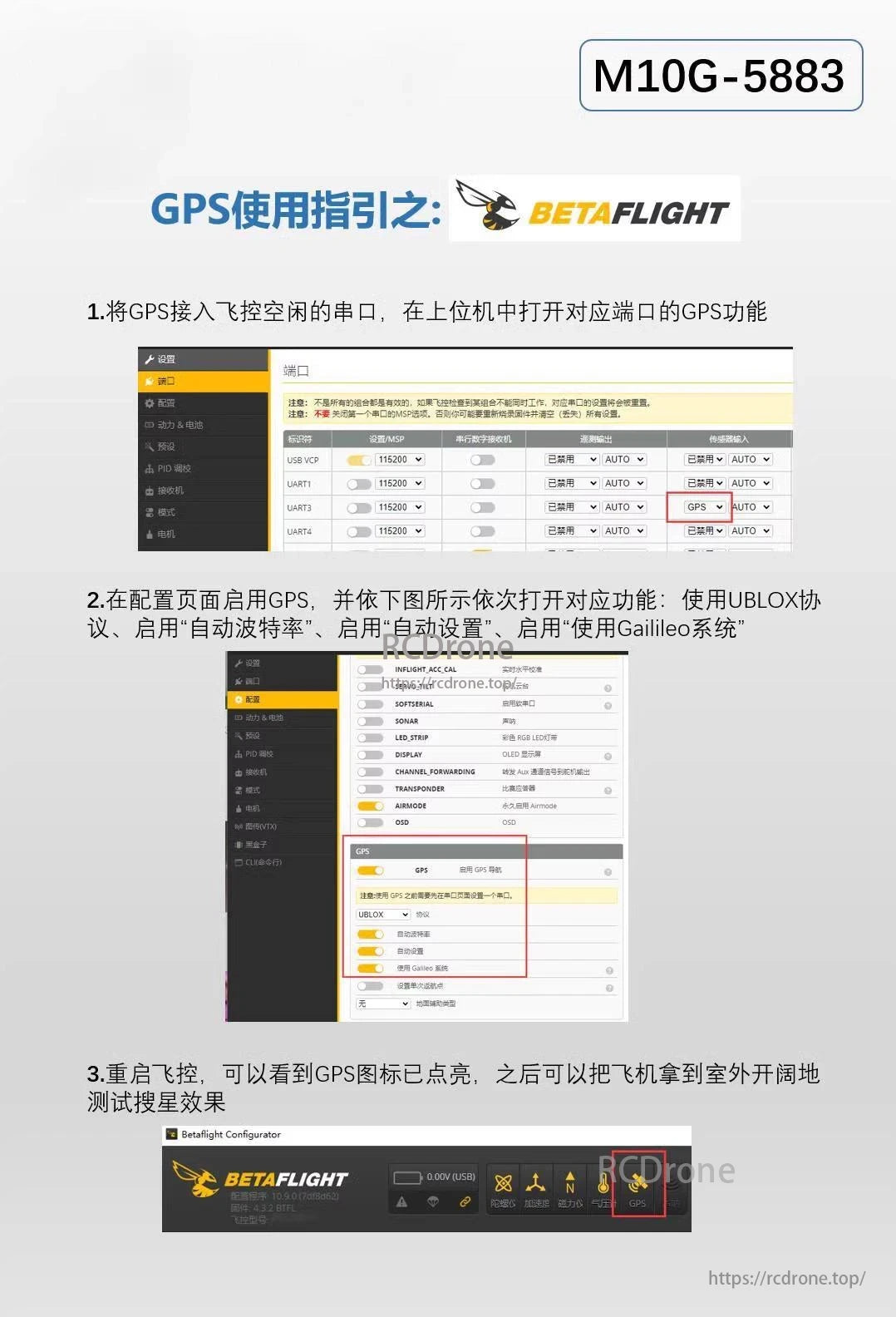
Betaflight용 M10G-5883 GPS 설정 가이드. GPS를 무료 직렬 포트에 연결하고, GPS 기능을 활성화하며, UBLOX 프로토콜, 자동 전송 속도, 자동 설정 및 갈릴레오 시스템을 설정합니다. GPS 아이콘 활성화를 위해 재시작하십시오.
Related Collections




