




Vizum 인텔리전트 Vihero 다기능 로봇 핸드, 16자유도 5-지 손, 24V CAN FD, 233x89x45 mm, 780g
Vizum 인텔리전트 Vihero 다기능 로봇 핸드, 16자유도 5-지 손, 24V CAN FD, 233x89x45 mm, 780g
Vizum
정가
$6,999.00 USD
정가
할인가
$6,999.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
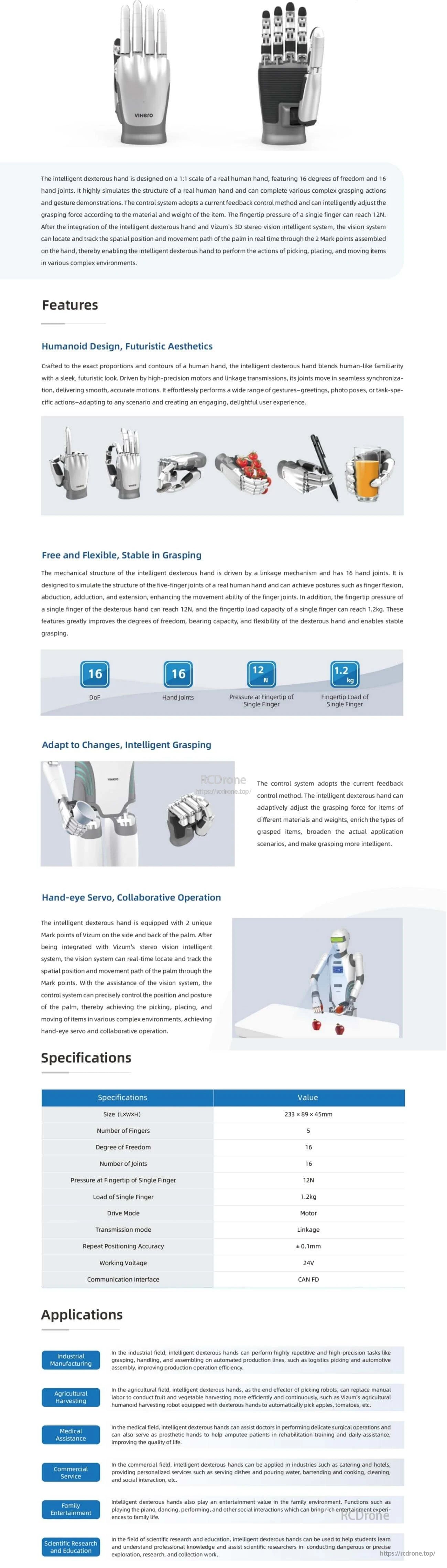
비줌 지능형 비히로 다재다능 로봇 손은 16개의 자유도와 16개의 관절을 가진 5손가락 인체형 최종 효과기로, 정밀한 잡기 및 조작을 위해 인간 손의 운동학을 시뮬레이션하도록 설계되었습니다. 모터 구동 링크 전송 구조와 전류 피드백 제어를 통해 다양한 물품과 재료에 대한 적응형 그립 힘을 가능하게 합니다. 이 손은 손바닥의 마크 포인트를 통해 비줌 스테레오 비전과의 통합을 지원하여 시스템이 복잡한 환경에서 조정된 집기, 놓기 및 이동 작업을 위해 손바닥의 위치와 방향을 찾고 추적할 수 있도록 합니다.
주요 특징
- 인간과 유사한 손재주를 위한 16 DoF 및 16개의 관절을 가진 5손가락 인체형 디자인.
- 동기화되고 안정적인 움직임을 위한 링크 전송 모터 드라이브.
- 다양한 물체에 대한 손끝 힘을 적응적으로 조절하기 위한 전류 피드백 그립 제어.
- 단일 손가락의 손끝 압력 최대 12 N; 단일 손가락 하중 용량 최대 1.2 kg.
- 정밀 조작을 위한 반복 위치 정확도 +/- 0.1 mm.
- 시스템 통합을 위한 CAN FD 통신을 갖춘 24 V 작동 전압.
- 손바닥 마크 포인트를 통해 Vizum 스테레오 비전과 통합 시 손-눈 협업을 지원합니다.
사전 판매 또는 기술 지원을 원하시면 [email protected] or에 문의하시거나 https://rcdrone.top/를 방문하십시오.
사양
| 크기 (L x W x H) | 233 mm x 89 mm x 45 mm |
| 무게 | 780 g |
| 손가락 수 | 5 |
| 자유도 | 16 |
| 관절 수 | 16 |
| 단일 손가락의 손끝 압력 | 12 N |
| 단일 손가락의 하중 | 1.2 kg |
| 구동 모드 | 모터 |
| 전송 모드 | 연결 |
| 반복 위치 정확도 | +/- 0.1 mm |
| 작동 전압 | 24 V |
| 통신 인터페이스 | CAN FD |
응용 분야
- 산업 제조: 자동화된 라인에서 잡기, 취급 및 조립과 같은 반복적인 고정밀 작업.
- 농업 수확: 농산물을 다루기 위한 픽킹 로봇의 엔드 이펙터로 사용.
- 상업 서비스: 로봇 플랫폼을 이용한 케이터링, 환대, 청소 및 사회적 상호작용 작업.
- 가족 오락: 놀이, 공연 및 인터랙티브 시연.
- 과학 연구 및 교육: 로봇 연구, 교육 및 능숙한 조작 연구.
매뉴얼
- Vihero_Dexterous_Hand_Manual.pdf
- Dexterous_Hand_Brochure.pdf
- INTELLIGENT_DEXTEROUS_HAND_L_stp.zip
- INTELLIGENT_DEXTEROUS_HAND_R_stp.zip
상세정보
Vizum Vihero 다재다능한 로봇 손은 16 DoF로 인간의 손을 모방하며, 지능적으로 그립 힘을 조절하고, 정밀한 조작을 위해 스테레오 비전을 통합하여 산업, 의료, 농업, 상업, 엔터테인먼트 및 교육 분야에 적합합니다.




