WitMotion WT1-IMU 듀얼 축 각도 센서(가속도계 + 경사계), 3.3–5V TTL, 0.5° 정확도, 20Hz 출력
WitMotion WT1-IMU 듀얼 축 각도 센서(가속도계 + 경사계), 3.3–5V TTL, 0.5° 정확도, 20Hz 출력
WitMotion
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
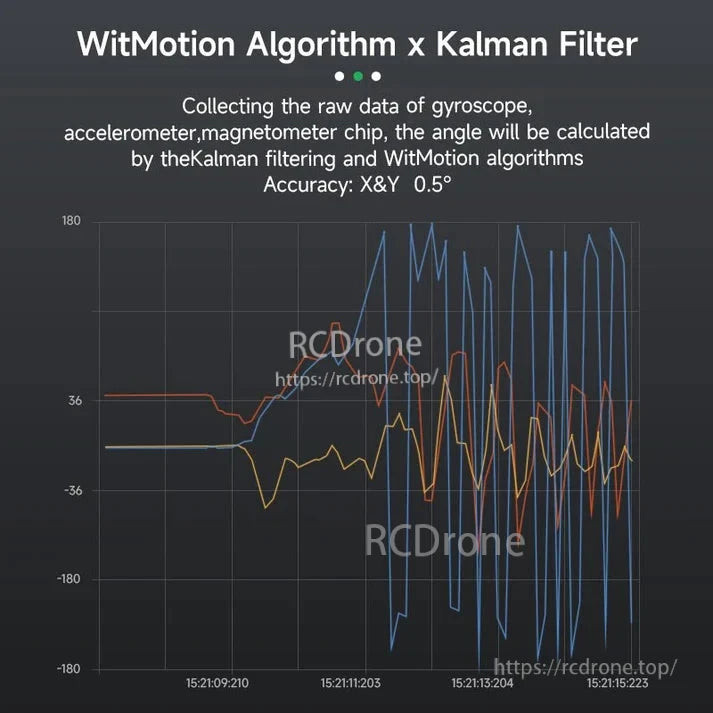
WitMotion WT1-IMU는 가속도계/자이로스코프/자기계 데이터와 칼만 필터 기반 알고리즘을 융합하여 실시간으로 X/Y 각을 출력하는 매우 비용 효율적인 이중 축 각도 센서입니다. 이 모듈은 3.3–5 V에서 작동하며, TTL 직렬로 통신하고, SMT 통합이 용이한 콤팩트한 금도금 스탬프 홀 PCB에 구축되어 있습니다. 일반적인 각도 정확도는 ±0.5° (X & Y)이며, 20 Hz의 기본 반환 속도를 가지고 있습니다. 공식 PC 소프트웨어는 대시보드, 보정, 로깅 및 내보내기를 제공하며; SDK/예제는 MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino 및 C/C#을 지원합니다.
주요 특징
-
자세/기울기 측정을 위한 이중 축 각도 출력 (X, Y)
-
높은 안정성을 위한 칼만 필터 + WitMotion 융합 알고리즘
-
전원: 3.3–5 V, TTL UART; LDO 내장
-
정확도: ±0.5° (X & Y)
-
각도 범위: X ±180°, Y ±90°
-
기본 반환 비율: 20 Hz (소프트웨어에서 구성 가능)
-
전류 소비: 전형적 ~5 mA, <10 mA
-
컴팩트 15.24 × 15.24 mm 모듈; 금도금 스탬프 홀
-
무료 PC 소프트웨어: 대시보드, 보정, 대역폭/전송 속도 설정, 데이터 기록 &및 재생, TXT/BIN/PLAY/XLS로 내보내기
-
액세서리/고정구: 선택적 USB-TTL 어댑터 및 테스트 번지기 고정구로 손쉬운 시작
사양
| 항목 | 값 |
|---|---|
| 모델 | WT1-IMU |
| 전압 | 3.3–5 V |
| 인터페이스 | TTL UART |
| 출력 내용 | 2축 각도 (X, Y) |
| 각도 범위 | X: ±180°;Y: ±90° |
| 각도 정확도 | X/Y: ±0.5° |
| 기본 반환 비율 | 20 Hz |
| 전송 속도 | 9600 (기본 20 Hz 출력) |
| 전류 | 전형적으로 5 mA; <10 mA |
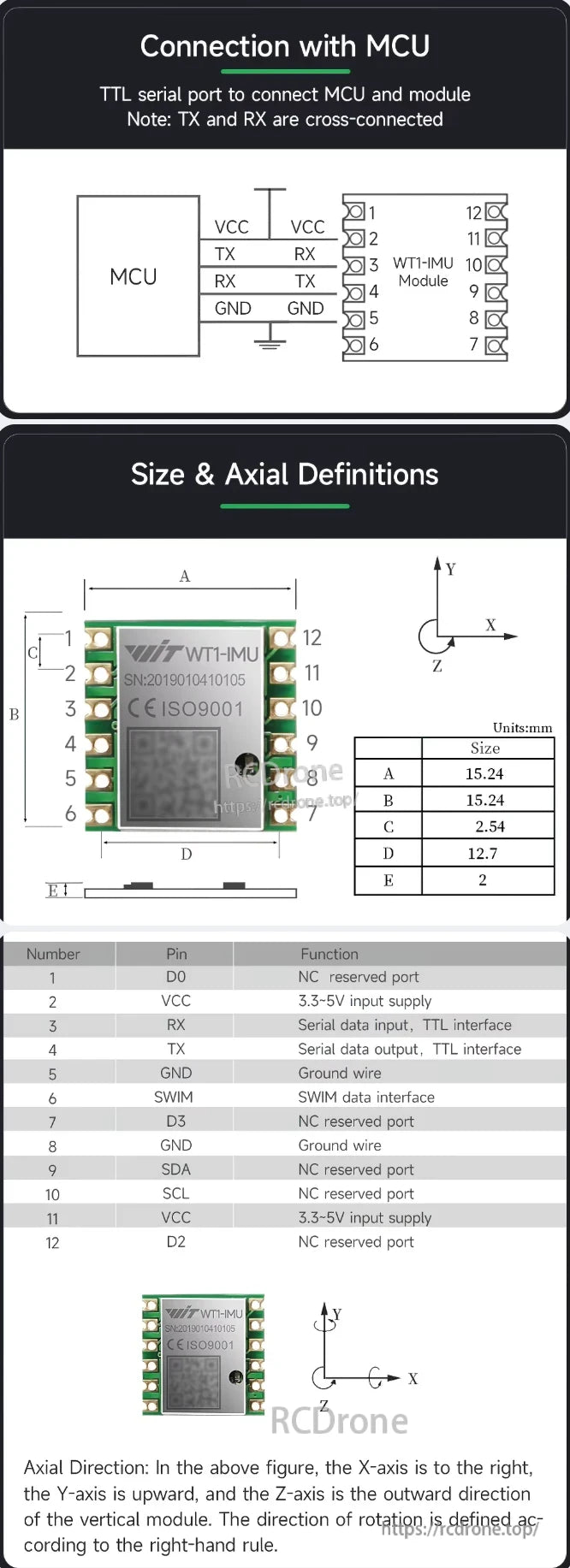
치수 &및 축
| 크기 (mm) | 값 |
|---|---|
| A | 15.24 |
| B | 15.24 |
| C | 2.54 |
| D | 12.7 |
| E (높이) | 2 |
축 정의: X는 오른쪽, Y는 위쪽, Z는 보드에서 바깥쪽; 회전은 오른손 법칙을 따릅니다.
핀 배치 (12핀 스탬프 홀)
| 번호. | 핀 | 기능 |
|---|---|---|
| 1 | D0 | NC (예약됨) |
| 2 | VCC | 3.3–5 V 입력 |
| 3 | RX | 직렬 데이터 입력 (TTL) |
| 4 | TX | 직렬 데이터 출력 (TTL) |
| 5 | GND | 접지 |
| 6 | SWIM | SWIM 데이터 인터페이스 |
| 7 | D3 | NC (예약됨) |
| 8 | GND | 접지 |
| 9 | SDA | NC (예약됨) |
| 10 | SCL | NC (예약됨) |
| 11 | VCC | 3.3–5 V 입력 |
| 12 | D2 | NC (예약됨) |
MCU 연결: TTL 직렬; TX 교차 연결↔RX (MCU-TX → WT1-IMU RX, MCU-RX → WT1-IMU TX), VCC 및 GND 공통.
소프트웨어 &및 개발
-
대시보드: 각도, 가속도, 각속도, 자기장, 쿼터니언 등의 실시간 보기.
-
설정 메뉴: 가속도 &및 자기 보정, 배치 방향, 출력 주파수/대역폭, 전송 속도, 절전 모드.
-
녹화/내보내기: TXT/BIN/PLAY로 빠르게 기록하고 내보내거나 Excel (XLS)에 붙여넣기.
-
도구: 예제/SDK는 MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#에 대한 것입니다.
-
플러그 앤 플레이 플래싱/부팅을 위한 선택적 테스트 번닝 장치.
일반적인 응용 프로그램
헤드 마운트 디스플레이, 움직임 추적, 로봇 공학, AGV/UGV, 무인 주행, 광산/타워/산업 태세 모니터링, 자동화 장비, 유인 항공기 R&&D, 안전 모니터링, 스마트/자동화 농장.
세부 사항

이중 축 각도 센서, 비용 효율적, 안정적, 칼만 필터 알고리즘 포함, ISO9001 인증.
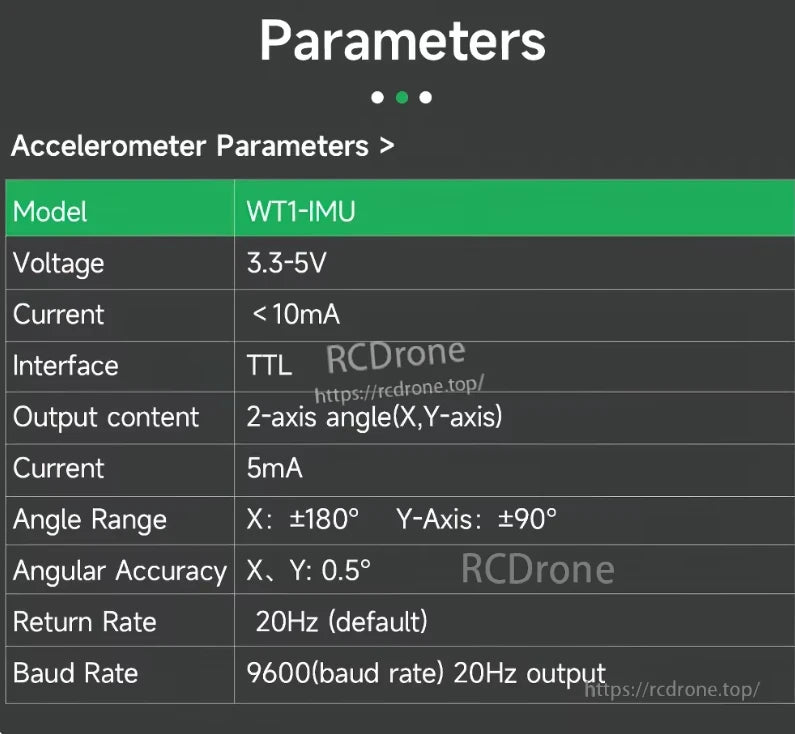
WT1-IMU 가속도계는 3.3-5V에서 작동하며, <10mA 전류, TTL 인터페이스. 0.5° 정확도로 2축 각도(X: ±180°, Y: ±90°)를 출력합니다. 기본 반환 속도 20Hz, 전송 속도 9600.
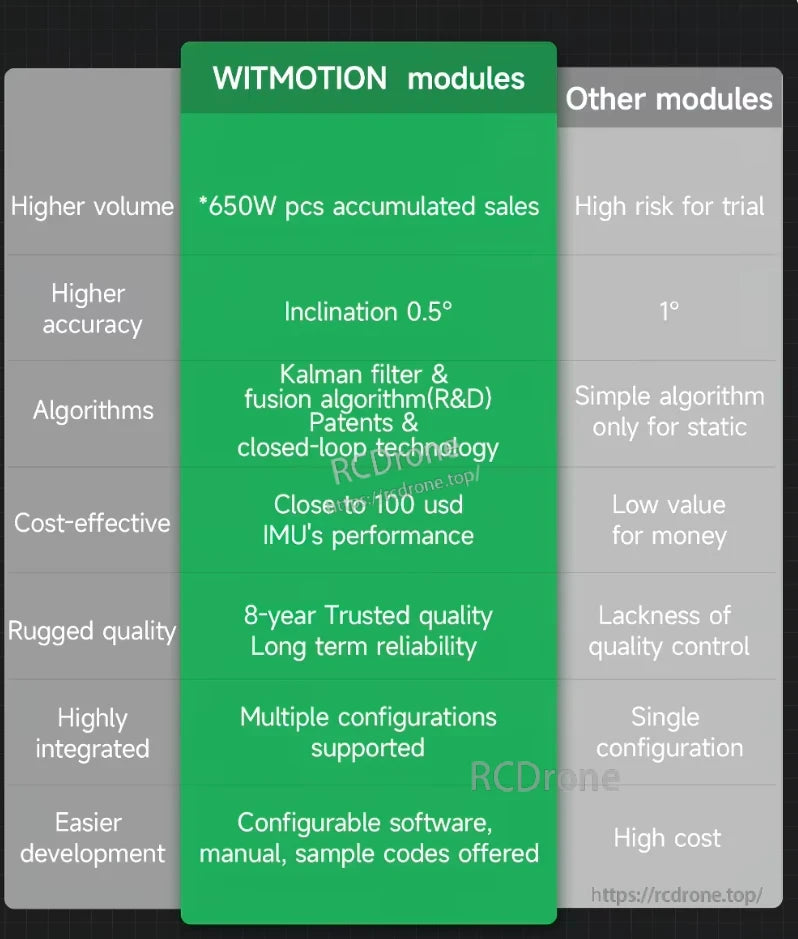
WitMotion 모듈은 견고한 디자인, 다양한 구성 및 쉬운 개발을 통해 높은 볼륨, 정확성 및 비용 효율성을 제공합니다. 이 모듈은 650W 판매, 0.5° 기울기, 칼만 필터, 폐쇄 루프 기술 및 구성 가능한 소프트웨어를 포함합니다. 다른 모듈은 성능이 낮고, 기능이 적으며, 위험이 더 높습니다.
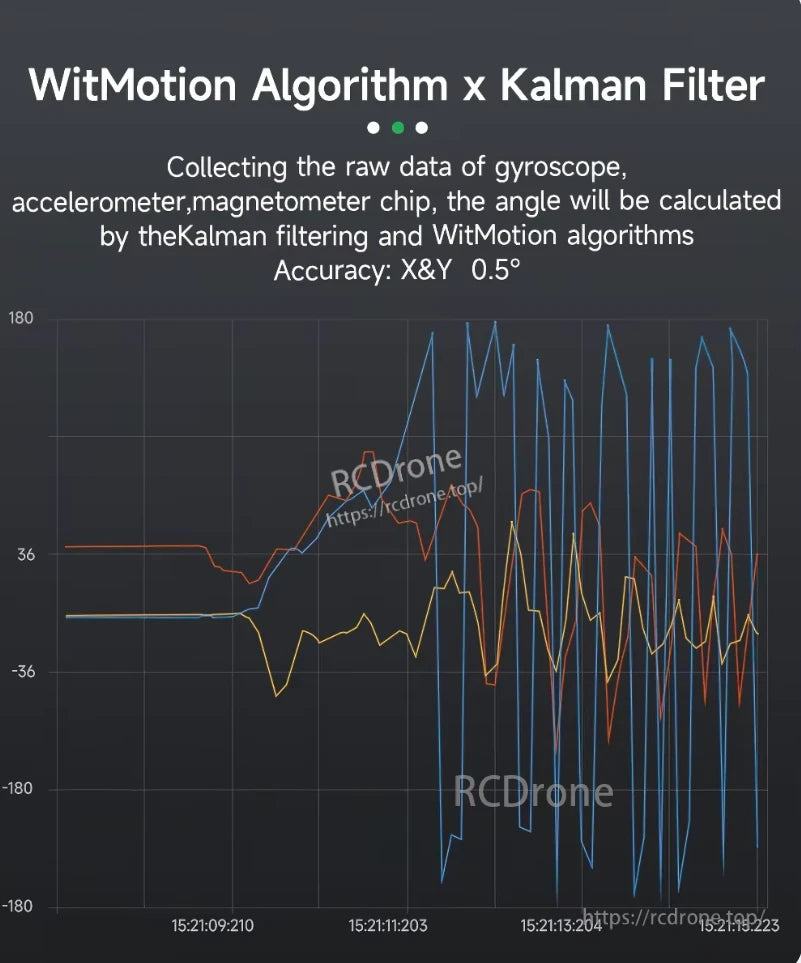
WitMotion 알고리즘 x 칼만 필터. 자이로스코프, 가속도계, 자기계에서 원시 데이터를 수집합니다. 칼만 필터링 및 WitMotion 알고리즘을 사용하여 각도를 계산합니다. 정확도: X&Y 0.5°.
인터페이스: 3.3~5V, TTL, LDO 내장. 고밀도 4층 보드와 금도금 스탬프 홀로 컴팩트& 설치가 용이합니다. 초보자를 위한 적응형 범위 전환. 개발 키트에는 소프트웨어, 매뉴얼, 프로토콜, SDK 및 샘플 코드가 포함됩니다.
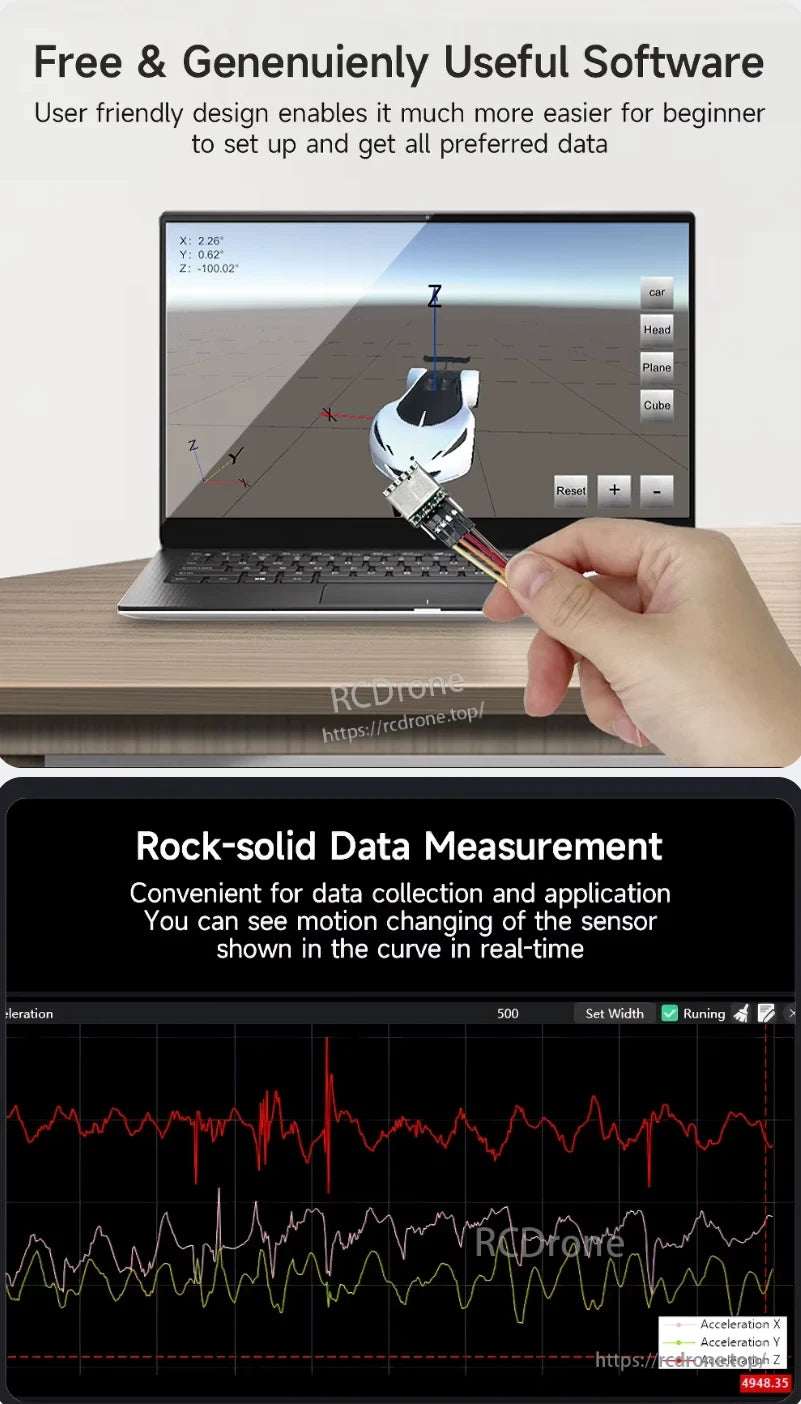
무료 &및 진정으로 유용한 소프트웨어는 사용자 친화적인 디자인으로 쉽게 설정하고 데이터를 검색할 수 있습니다. 실시간 모션 추적은 동적 곡선을 통해 X, Y, Z 축의 가속도 변화를 표시하는 견고한 데이터 측정을 제공합니다.
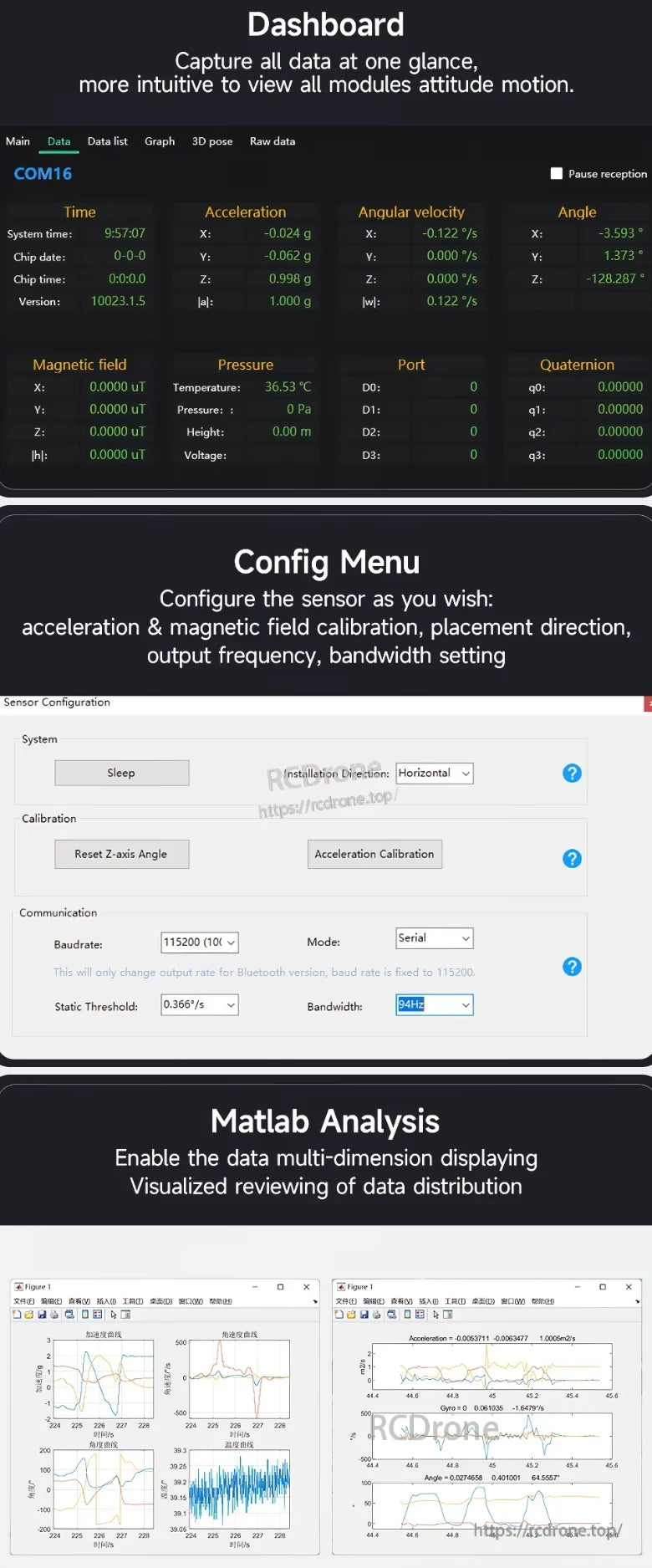
대시보드는 가속도, 각속도, 각도, 자기장, 압력 및 쿼터니언을 포함한 실시간 센서 데이터를 표시합니다. 구성 메뉴에서는 보정, 설치 방향, 전송 속도 및 대역폭 설정을 할 수 있습니다. Matlab 분석을 통해 다차원 데이터 시각화가 가능합니다.
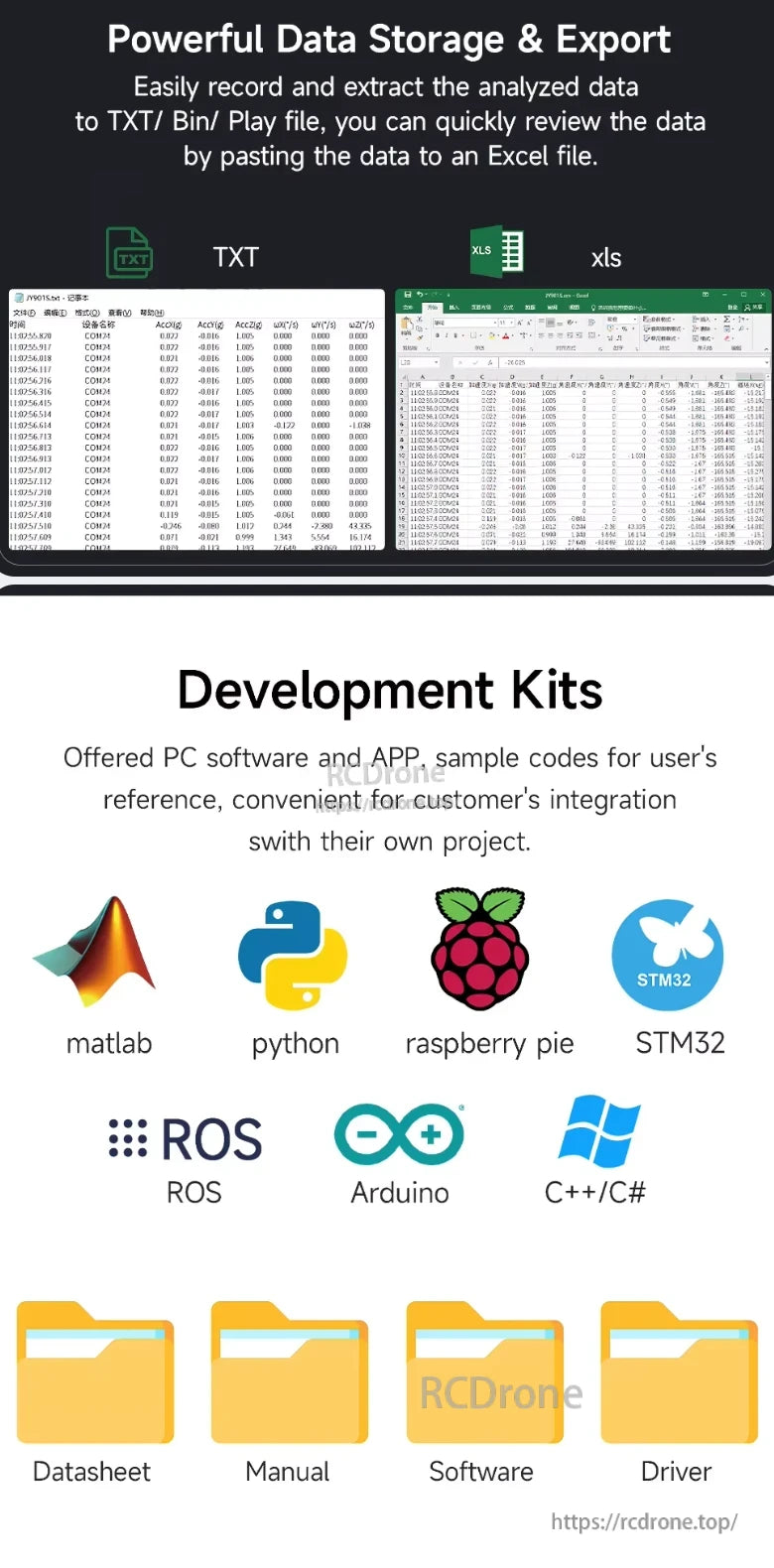
강력한 데이터 저장 및 TXT, BIN 또는 Play 파일로 내보내기; MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#와 호환됩니다. 쉬운 통합을 위한 데이터시트, 매뉴얼, 소프트웨어 및 드라이버가 포함되어 있습니다.
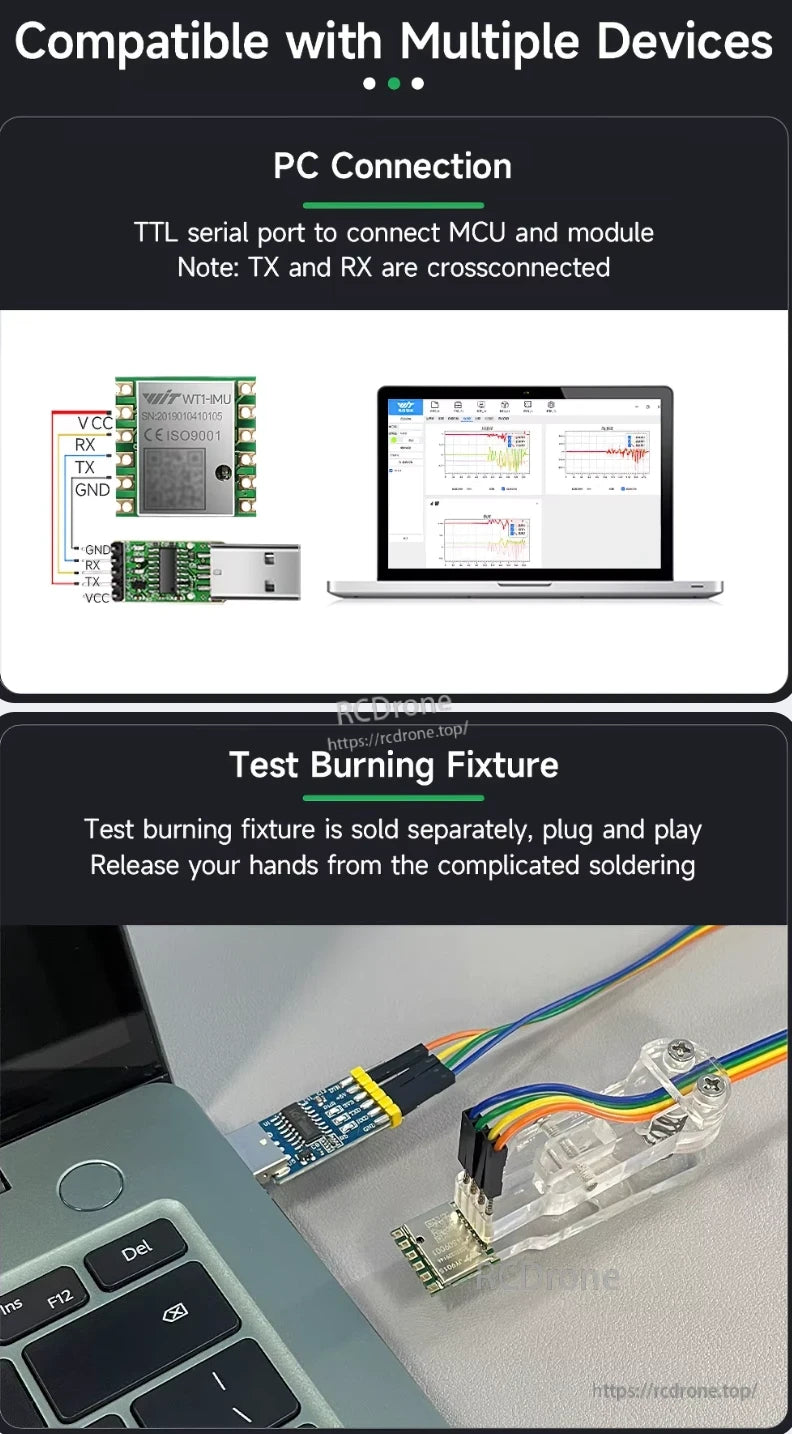
WitMotion WT1-IMU는 TX와 RX가 교차 연결된 TTL 직렬 포트를 통해 PC 연결을 지원합니다.다양한 장치와 호환됩니다. 테스트 번 핀은 별도로 판매되며, 납땜 없이 쉽게 설정할 수 있는 플러그 앤 플레이 방식입니다.
WitMotion WT1-IMU 이중 축 각도 센서는 TTL 직렬 연결, 12핀 레이아웃, 컴팩트한 15.24×15.24×2.54 mm 크기, 오른손 법칙 축을 제공하며 VCC, GND, TX, RX, SWIM, SDA, SCL 핀을 포함합니다.

IMU 센서 응용 분야: 광업, 농업, 로봇 공학, 타워, 자동화, 드론, 추적, 모니터링.