WitMotion WT61C 고정밀 가속도 센서(MPU6050) - 6축 가속+자이로+각도 AHRS IMU, Arduino / TTL & RS232용
WitMotion WT61C 고정밀 가속도 센서(MPU6050) - 6축 가속+자이로+각도 AHRS IMU, Arduino / TTL & RS232용
WitMotion
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
WitMotion WT61C는 3축 가속도계와 3축 자이로스코프를 융합하여 6축 AHRS IMU를 제공하는 비용 효율적인 장치입니다. 이 장치는 가속도, 각속도 및 3축 각도(롤/피치/요)를 출력합니다. WitMotion 융합(Kalman) 알고리즘으로 구동되며, XY 정적 각도 정확도는 0.05° (0.1° 동적)로, 내장 프로젝트, 로봇 공학, 자동화, 수평 플랫폼 및 VR/AR 통합에서 경사, 진동 및 자세 감지에 이상적입니다. 이 장치는 TTL (3.3–5 V) 및 RS232 (5–36 V) 직렬 인터페이스를 지원하며, 제공된 SDK 및 PC 도구를 사용하여 Arduino, STM32, C/C++, MATLAB와 원활하게 작동합니다.
주요 특징
-
6축 출력: 3축 가속도, 3축 각속도, 그리고 3축 각도.
-
높은 정확도: XY 정적 0.05°, 동적 0.1°; 가속도 안정성 0.01 g.
-
넓은 범위: 가속도 ±16 g; 자이로 ±2000 °/s; 각도 X/Z ±180°, Y 90°.
-
조정 가능한 출력 속도: 0.2–100 Hz; 전송 속도 9600 / 115200 bps.
-
이중 인터페이스: TTL 3.3–5 V 또는 RS232 5–36 V로 MCU/산업 통합이 용이합니다.
-
WitMotion 융합 알고리즘: 안정적인 자세를 위한 드리프트 보정이 포함된 칼만 필터링.
-
소프트웨어를 통해 구성 가능: 가속도 보정, 배치 방향, 대역폭, 출력 속도, Z축을 0°로 재설정.
-
개발자 리소스: 무료 Windows PC 소프트웨어 (MiniIMU.exe), 드라이버 (CH340/CP2102), 매뉴얼 &및 데이터시트, SDK for 51 시리얼, C/C++, STM32, Arduino, MATLAB, 그리고 Android 앱 및 데모 비디오.
-
데이터 도구: 원시 데이터 보기, 실시간 차트, TXT 내보내기, 및 3D 모션 데모 (소스 코드는 요청 시 제공됩니다).
기술 사양
-
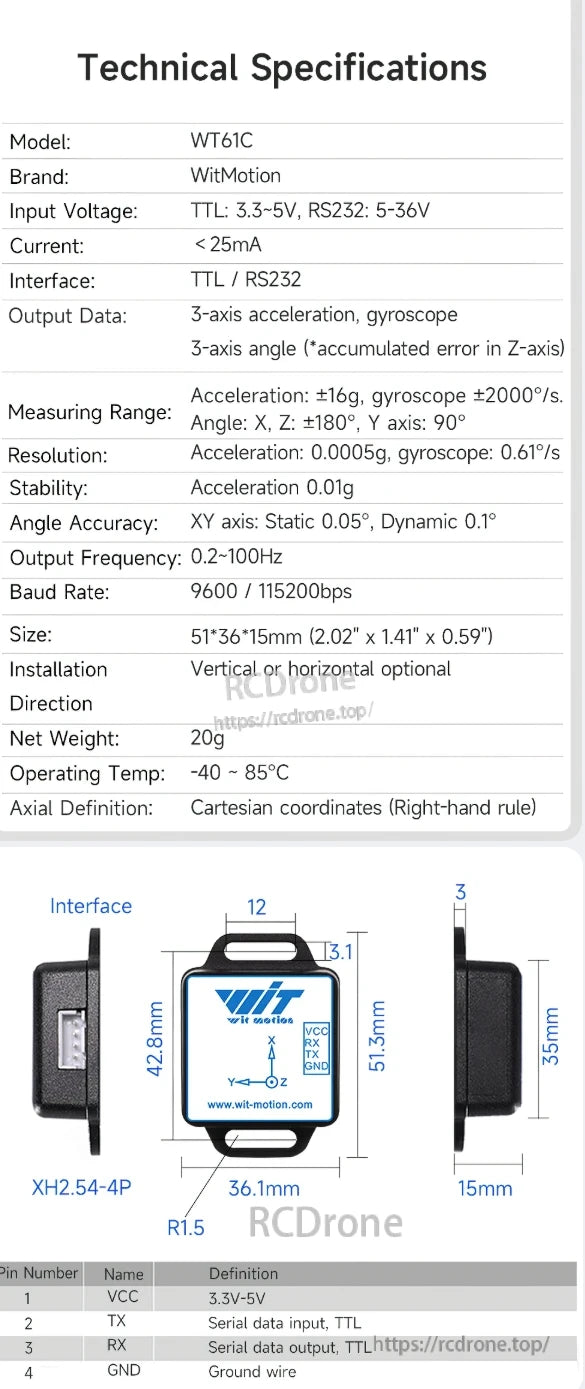
모델: WT61C
-
브랜드: WitMotion
-
입력 전압: TTL: 3.3–5 V; RS232: 5–36 V
-
전류: < 25 mA
-
인터페이스: TTL / RS232
-
출력 데이터: 3축 가속도, 3축 자이로, 3축 각도 (Z축의 누적 오차)
-
측정 범위: 가속도 ±16 g; 자이로 ±2000 °/s; 각도 X/Z ±180°, Y 90°
-
해상도: 가속도 0.0005 g; 자이로 0.61 °/s
-
안정성: 가속도 0.01 g
-
각도 정확도: XY 정적 0.05°, 동적 0.1°
-
출력 주파수: 0.2–100 Hz
-
전송 속도: 9600 / 115200 bps
-
크기: 51 × 36 × 15 mm (≈ 2.02″ × 1.41″ × 0.59″)
-
설치: 수직 또는 수평
-
순중량: 20 g
-
작동 온도: −40 ~ 85 °C
-
축 정의: 직교 좌표계, 오른손 법칙
핀 배치 (XH2.54-4P, TTL)
-
VCC — 3.3–5 V
-
TX — 직렬 데이터 입력, TTL
-
RX — 직렬 데이터 출력, TTL
-
GND — 접지
각도 출력 프로토콜 (프레임 헤드 0x55 0x53)
| 인덱스 | 바이트 | 의미 |
|---|---|---|
| 0 | 0x55 | 헤더 |
| 1 | 0x53 | 각도 패킷으로 식별 |
| 2 | RollL | X축 각도 저 바이트 |
| 3 | RollH | X축 각도 고 바이트 |
| 4 | PitchL | Y축 각도 저 바이트 |
| 5 | PitchH | Y축 각도 고바이트 |
| 6 | YawL | Z축 각도 저바이트 |
| 7 | YawH | Z축 각도 고바이트 |
| 8 | VL | 펌웨어 버전 저 |
| 9 | VH | 펌웨어 버전 고 |
| 10 | 합계 | 체크섬 |
각도 해독 (°):
-
롤 = ((RollH<<8)|RollL) / 32768 * 180 -
피치 = ((PitchH<<8)|PitchL) / 32768 * 180 -
요 = ((YawH<<8)|YawL) / 32768 * 180
체크섬:합계 = 0x55 + 0x53 + RollH + RollL + PitchH + PitchL + YawH + YawL + VH + VL
(가속도 및 각속도 패킷은 유사한 형식을 따릅니다.)
소프트웨어 &및 통합
-
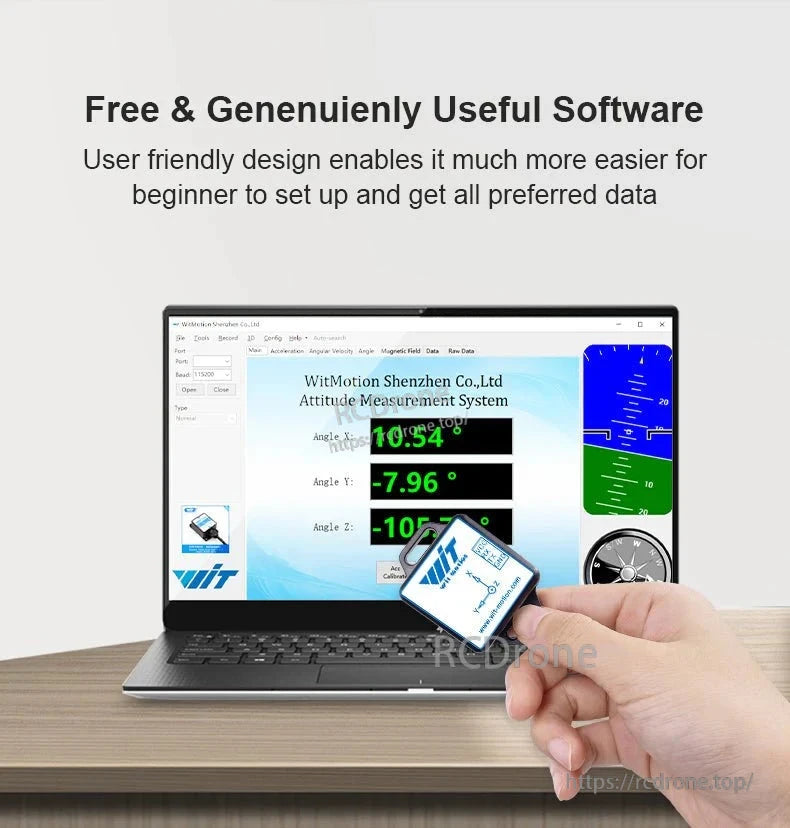
Windows 도구는 원시 프레임, 파싱된 데이터, 실시간 플롯 및 자세 게이지를 표시하며; 녹화 &및 TXT 내보내기를 지원합니다.
-
3D 데모는 움직임을 시각화합니다; 소스 코드를 제공할 수 있습니다.
-
MCU 연결: Arduino/MCU에 직접 직렬 연결; TTL이 더 간단한 통합을 위해 권장됩니다.
일반적인 응용 프로그램
-
자동화 &및 로봇 공학, 기울기 각도 모니터링, 수평 플랫폼, 진동 모니터링, 산업 테스트, IoT 통합, VR/AR 헤드셋.
세부 사항

0.05° 정확도를 가진 비용 효율적인 IMU입니다.특징으로는 WitMotion Fusion Algorithm을 사용한 기울기, 진동 및 자세 감지가 포함됩니다. 가속도, 자이로스코프, 각도, 진동, 칼만 필터링 및 MCU 기능이 포함되어 있습니다.
WitMotion WT61C 센서는 3축 가속도 및 ±16g/±2000°/s 범위의 자이로스코프, 0.0005g 해상도, TTL/RS232 인터페이스, 9600/115200bps 전송 속도, -40°C에서 85°C의 작동 온도, 그리고 51.3×36.1×15mm의 크기를 제공합니다.
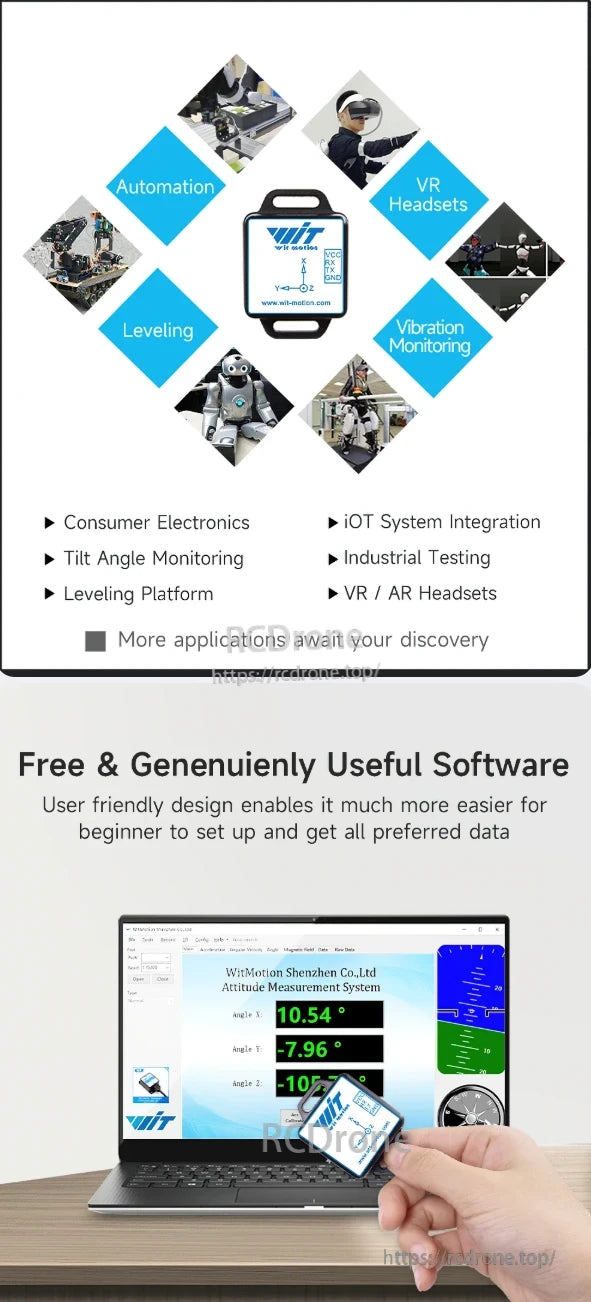
WitMotion WT61C 가속도계 센서는 자동화, VR 헤드셋, 수평 조정 및 진동 모니터링을 가능하게 합니다. 소비자 전자 제품, IoT, 산업 테스트 및 기타 응용 프로그램을 위한 사용자 친화적인 인터페이스로 실시간 자세 데이터를 표시하는 무료 소프트웨어가 제공됩니다.
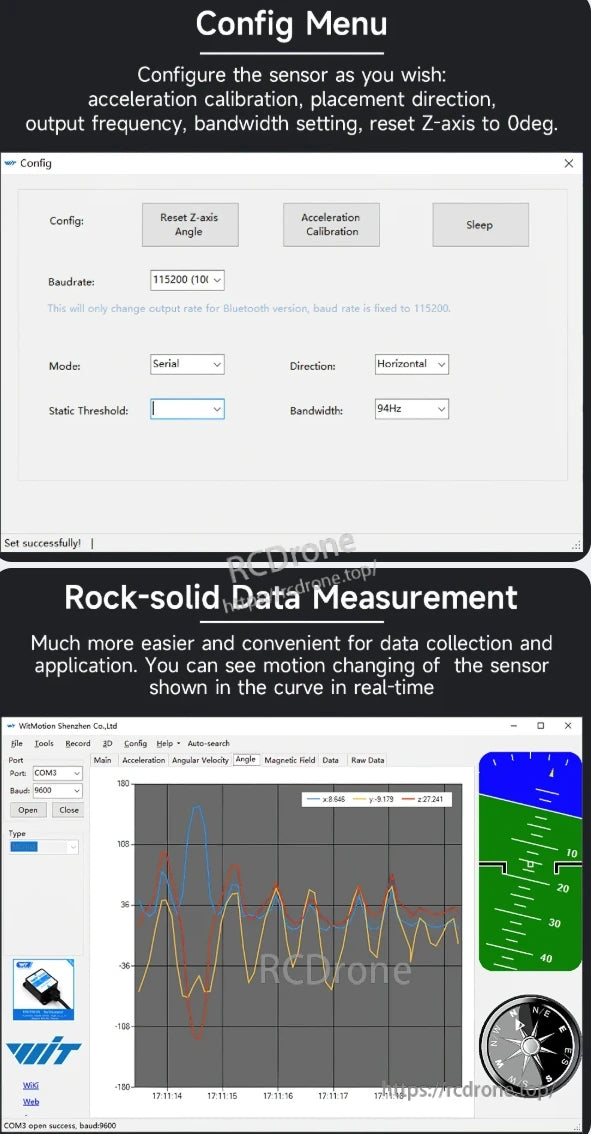
가속도 보정, 방향 설정 및 실시간 데이터 측정이 가능한 구성 가능한 센서입니다.기능에는 Z축 리셋, 대역폭 조정 및 정밀 모니터링 및 분석을 위한 실시간 모션 곡선 표시가 포함됩니다.
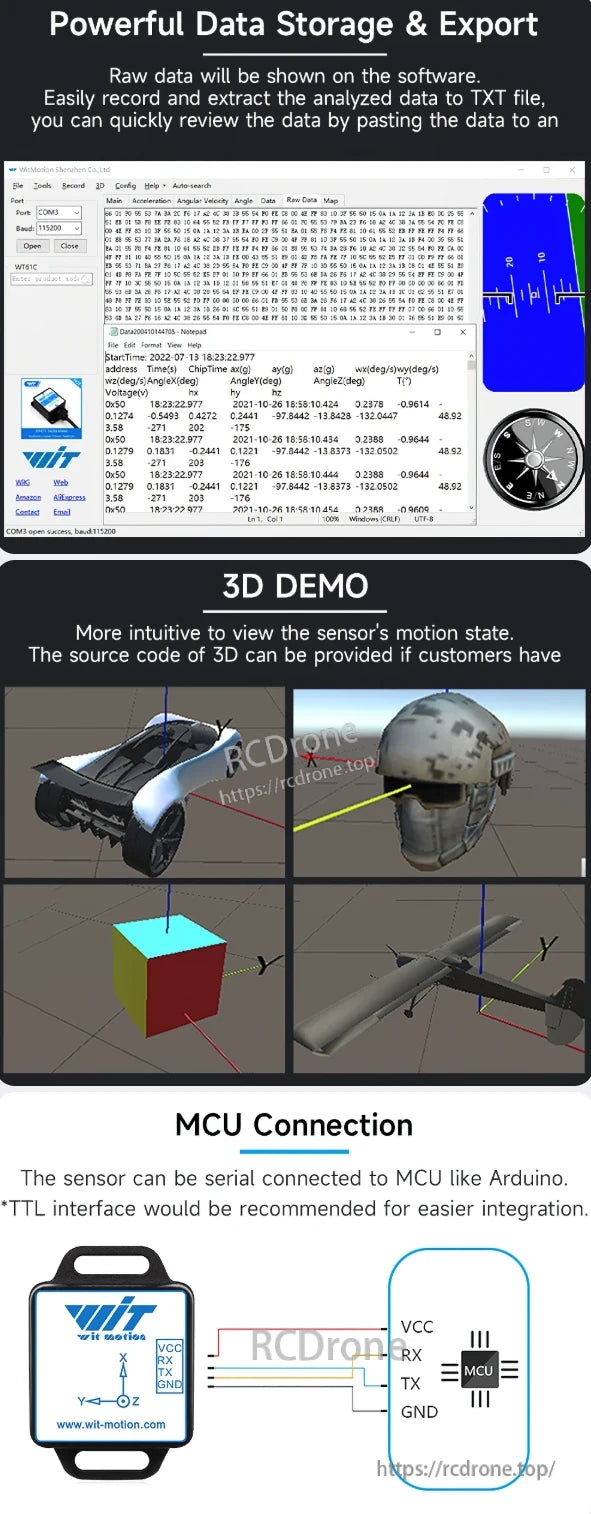
WitMotion WT61C는 TXT 파일로 데이터 내보내기, 직관적인 모션 분석을 위한 3D 시각화 및 TTL 인터페이스를 통한 쉬운 MCU 통합으로 고정밀 모션 감지를 제공합니다.

WitMotion WT61C용 개발 키트에는 STM32, Arduino, Windows 및 Matlab용 소프트웨어, 드라이버 및 문서가 포함되어 있습니다. SDK, 매뉴얼, 데이터시트, 데모 비디오 및 Android 앱 지원 기능이 포함되어 있습니다.
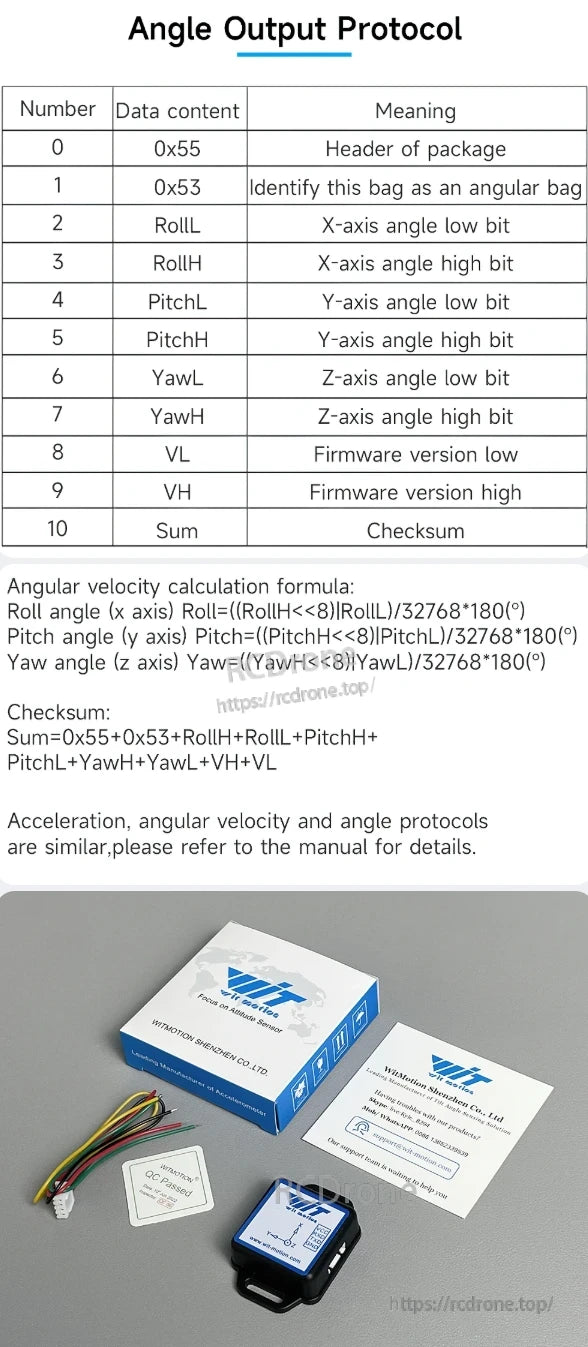
WitMotion WT61C 센서는 롤, 피치, 요, 펌웨어 버전 및 체크섬을 포함한 각도 출력 프로토콜을 제공합니다. 계산 공식, 문서, 케이블 및 QC 라벨이 함께 제공됩니다.