WitMotion WT901B AHRS (MPU9250) 10축 IMU, 기압계, & 틸트 센서, ±16g 가속도계, ±2000°/s 자이로, 칼만 필터, UART/I²C, 0.2–200Hz 출력
WitMotion WT901B AHRS (MPU9250) 10축 IMU, 기압계, & 틸트 센서, ±16g 가속도계, ±2000°/s 자이로, 칼만 필터, UART/I²C, 0.2–200Hz 출력
WitMotion
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
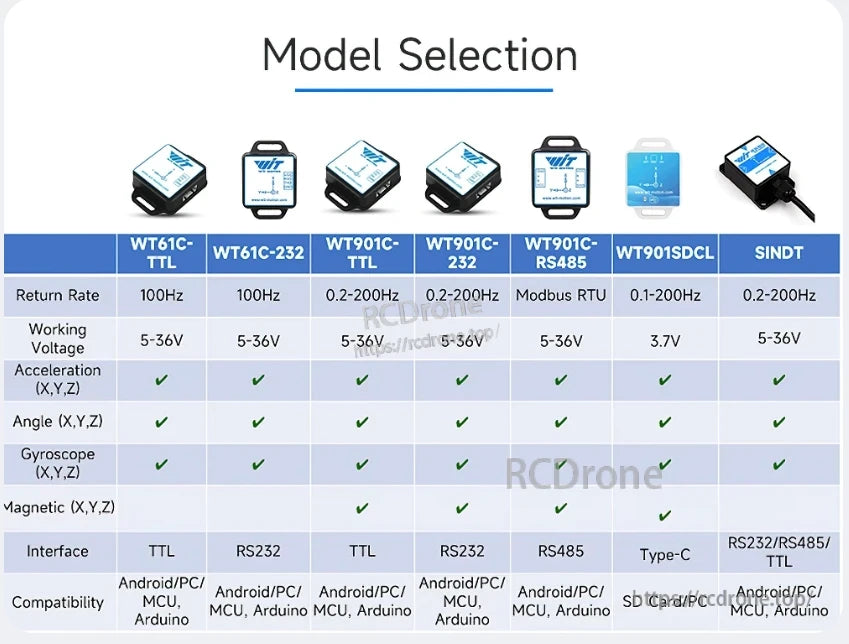
WitMotion WT901B AHRS (MPU9250)는 3축 가속도계, 3축 자이로스코프, 3축 자기계, 그리고 기압계를 통합하여 각도, 가속도, 각속도, 자기장, 기압 및 높이를 제공합니다. 48 MHz MCU와 LDO 조정 및 자체 개발한 융합 + 칼만 필터 알고리즘은 로봇 공학, 구조 모니터링, 모바일 기계 및 VR/소비자 장치에 대해 저소음, 안정적인 출력을 제공합니다.
주요 특징
-
10축 IMU + 기압계와 고도 계산 (상대 정확도 ±0.06 hPa)
-
각도 정밀도: X/Y 0.05° (정적), 0.1° (동적); 요 1° (보정됨, 저간섭)
-
구성 가능한 출력 0.2–200 Hz; 시작 시간 ≈ 1000 ms
-
인터페이스: UART (4800–230400 bps), I²C (오픈 드레인; 4.7 kΩ 풀업 필요)
-
전원 3.3–5.5 V, 전형적인 12 mA @5 V, 대기 15 µA
-
내구성: −40–85 °C 작동, 20,000 g 충격 저항
-
무료 Windows 소프트웨어 (실시간 곡선, TXT로 로깅), 시각적 자기 보정, 3D 데모 (소스 요청 시 제공)
-
인증: 교정 보고서, RoHS, CE, ISO9001
롤/피치 각도 사양
| 매개변수 | 조건 | 전형적인 |
|---|---|---|
| 범위 | — | X: ±180°, Y: ±90° |
| 경사 | 정적 / 동적 | 0.1° / 0.5° |
| 해상도 | 수평 | 0.0055° |
| 온도 드리프트 | −40–85 °C | ±0.5–1° |
방향 (요) 사양
| 항목 | 상태 | 일반적인 |
|---|---|---|
| 범위 | — | Z: ±180° |
| 해상도 | 수평 | 0.0055° |
| 정확도& | 9축 (동적/정적) | 1° (보정, 간섭에서 벗어난 상태) |
| 6축 (정적) | 0.5° 적분 누적 오차 |
센서 기술 사양
가속도계
| 범위 | 해상도 | RMS 노이즈 (100 Hz) | 정적 드리프트 | 온도 드리프트 | 대역폭 |
|---|---|---|---|---|---|
| ±16 g | 0.0005 g/LSB | 0.75–1 mg-rms | ±20–40 mg | ±0.15 mg/°C | 5–256 Hz |
자이로스코프
| 범위 | 해상도 | RMS 노이즈 (100 Hz) | 정적 드리프트 | 온도 드리프트 | 대역폭 |
|---|---|---|---|---|---|
| ±2000 °/s | 0.061 (°/s)/LSB | 0.028–0.07 (°/s)-rms | ±0.5–1 °/s | ±0.005–0.015 (°/s)/°C | 5–256 Hz |
자력계 &및 기압계
| 자력계 범위 | 자력계 해상도 | 기압계 범위 | RMS 노이즈 | 상대 정확도 |
|---|---|---|---|---|
| ±2 가우스 | 0.0667 mGauss/LSB | 300–1100 hPa | 0.5 Pa-RMS | ±0.06 hPa |
모듈 &및 전기
| 항목 | 최소 | 기본값 | 최대 |
|---|---|---|---|
| 출력 속도 | 0.2 Hz | 10 Hz | 200 Hz |
| 입력 전압 | 3.3 V | 5 V | 5.5 V |
| 작동 전류 (5 V) | — | 12 mA | — |
| 슬립 전류 (5 V) | — | 15 µA | — |
| 작동 온도 | −40 °C | — | 85 °C |
| 저장 온도 | −40 °C | — | 100 °C |
치수 &및 핀 배치
크기 (mm): A 15.24 × B 15.24 × C 2.54 × D 12.7 × E 2
축: X→오른쪽, Y→위쪽, Z→PCB에서 나옴 (오른손 법칙)
핀 (1–12):
D0, VCC(3.3–5 V), RX(TTL 입력), TX(TTL 출력), GND, D1(GPS 지원), D2(X+ 알람/리셋), VCC, SCL(Y+ 알람), SDA(Y− 알람), GND, D3(X− 알람)
연결성 &및 도구
-
UART TX↔RX 크로스 연결 MCU
-
I²C SCL/SDA에 4.7 kΩ 풀업 저항
-
외부 GPS (NMEA-0183) 배선으로 GPS-IMU 내비게이션 구축 (위도/경도, 고도, 방향, 속도, 이동 거리 출력)
소프트웨어 &및 개발 키트
구성, 보정(가속도/자기/각도/높이), 대역폭/비율 선택 및 원시/곡선 로깅을 위한 Windows PC 소프트웨어. Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#에 대한 예제 리소스; CH340/CP2102 드라이버; Android 앱; 데모 비디오; Manual.pdf &및 Datasheet.pdf.
응용 프로그램
IoT 센싱, 환경 &및 교량 모니터링, 로봇 공학 &및 자동화, 포크리프트 및 이동 기계, 광업, 소비자 전자 제품, VR 기기.
세부 사항

비용 효율적인 AHRS 기압계는 Z축 각도, 경사, 공기 압력, 가속도, 자이로 각도, 자기 높이 및 공기 압력 측정에 대해 높은 정확도를 제공합니다.

WitMotion WT901B AHRS IMU는 가속도계, 자이로스코프, 자기계 및 기압계를 포함합니다. ±16g, ±2000°/s, ±2 가우스, 300-1100hPa를 제공합니다. 높은 해상도, 낮은 잡음, 넓은 대역폭, 온도 안정성 -40°C에서 +85°C까지.

AHRS IMU WT901B는 ±180° 롤/피치/요, 0.0055° 해상도, 1° 정확도, 9축 알고리즘, UART/IIC, 200Hz 출력, -40°C에서 85°C 온도 범위, 3.3V-5.5V 입력을 제공합니다.
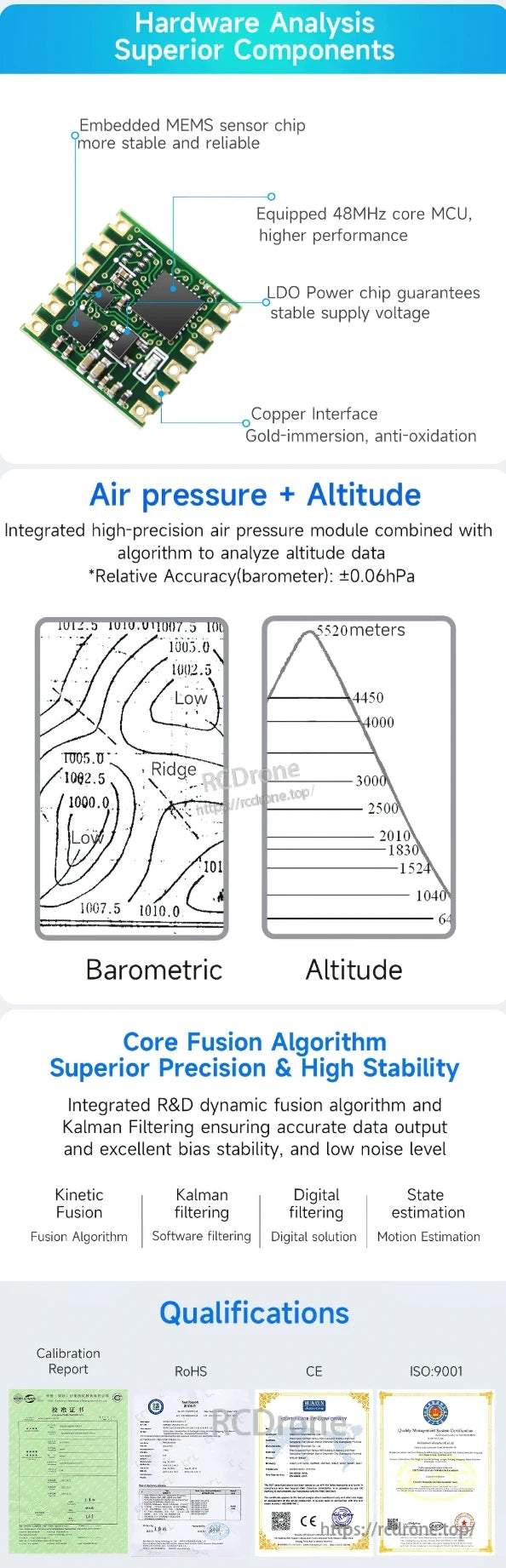
WT901B AHRS IMU는 MEMS 센서, 48MHz MCU, LDO 전원 칩 및 금 도금 구리 인터페이스를 갖추고 있습니다. ±0.06hPa의 압력 정확도를 제공하며, 안정적인 융합 알고리즘을 통해 RoHS, CE 및 ISO:9001 기준을 충족합니다.

AHRS IMU WT901B는 WitMotion 알고리즘을 사용하여 칼만 필터로 높은 각도 정확도를 제공합니다. IoT, VR, 로봇 공학, 광업, 교량 및 환경 모니터링에 적합합니다.
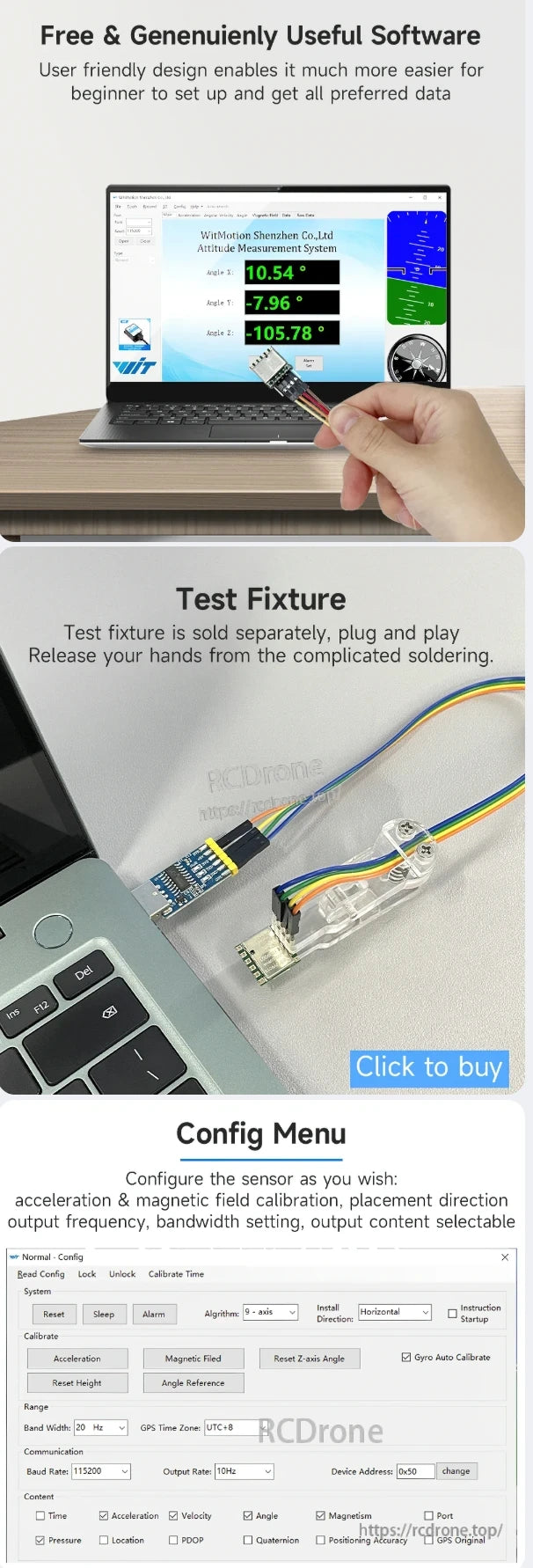
AHRS IMU WT901B는 무료로 제공되는 사용자 친화적인 소프트웨어, 플러그 앤 플레이 테스트 장치 및 보정, 출력 및 정밀 자세 측정을 위한 구성 가능한 설정을 제공합니다.
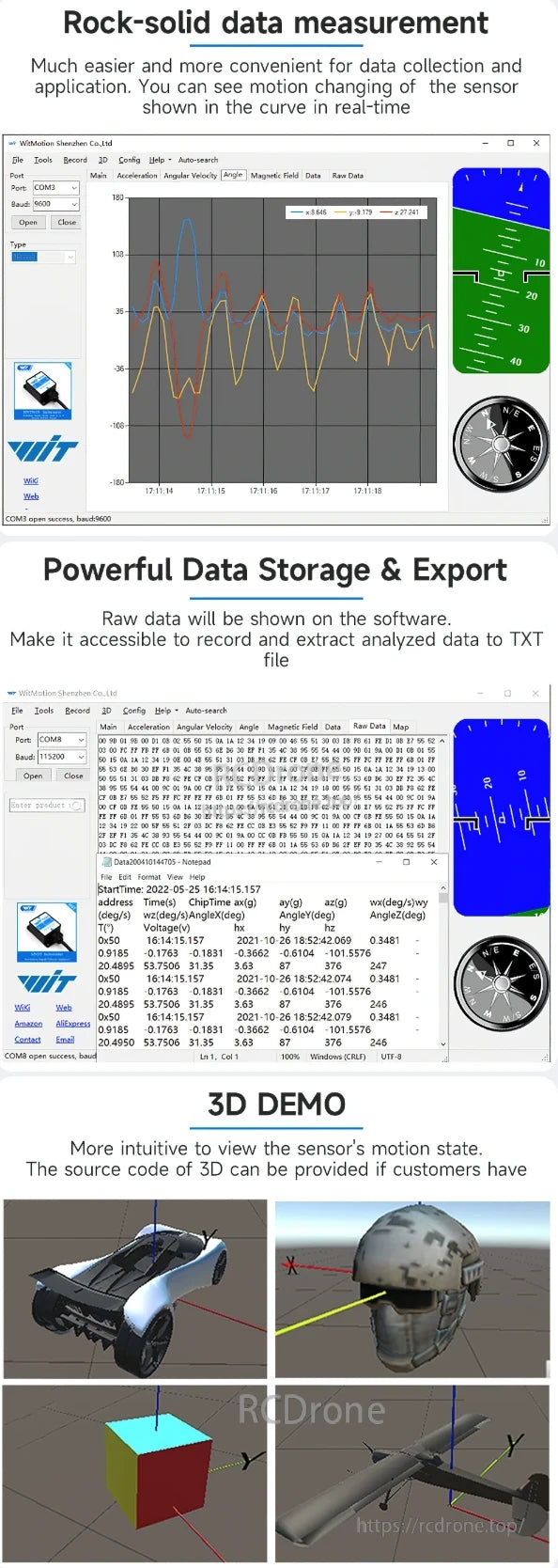
WT901B AHRS IMU는 실시간 데이터 측정, 강력한 저장 및 TXT 파일로의 내보내기를 제공하며, 직관적인 3D 모션 시각화를 지원합니다. 가속도, 각속도, 자기장 데이터 및 나침반 디스플레이와 같은 기능이 포함되어 있어 정밀한 센서 모니터링이 가능합니다.

AHRS IMU WT901B는 시각적 자기 보정, TTL/IIC MCU 연결, GPS 호환성을 제공합니다. 내비게이션을 위한 위도, 경도, 고도, 방향, 속도, 변위를 출력합니다.
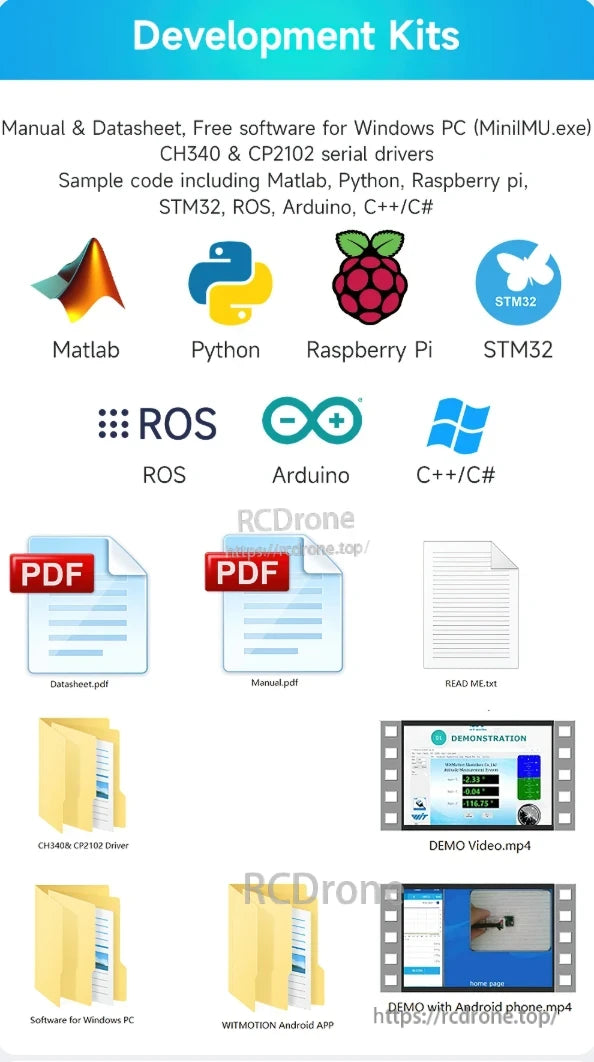
개발 키트에는 매뉴얼, 데이터 시트, Windows 소프트웨어, CH340 & CP2102 드라이버, Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#용 샘플 코드 및 Android와 PC용 데모 비디오가 포함되어 있습니다.
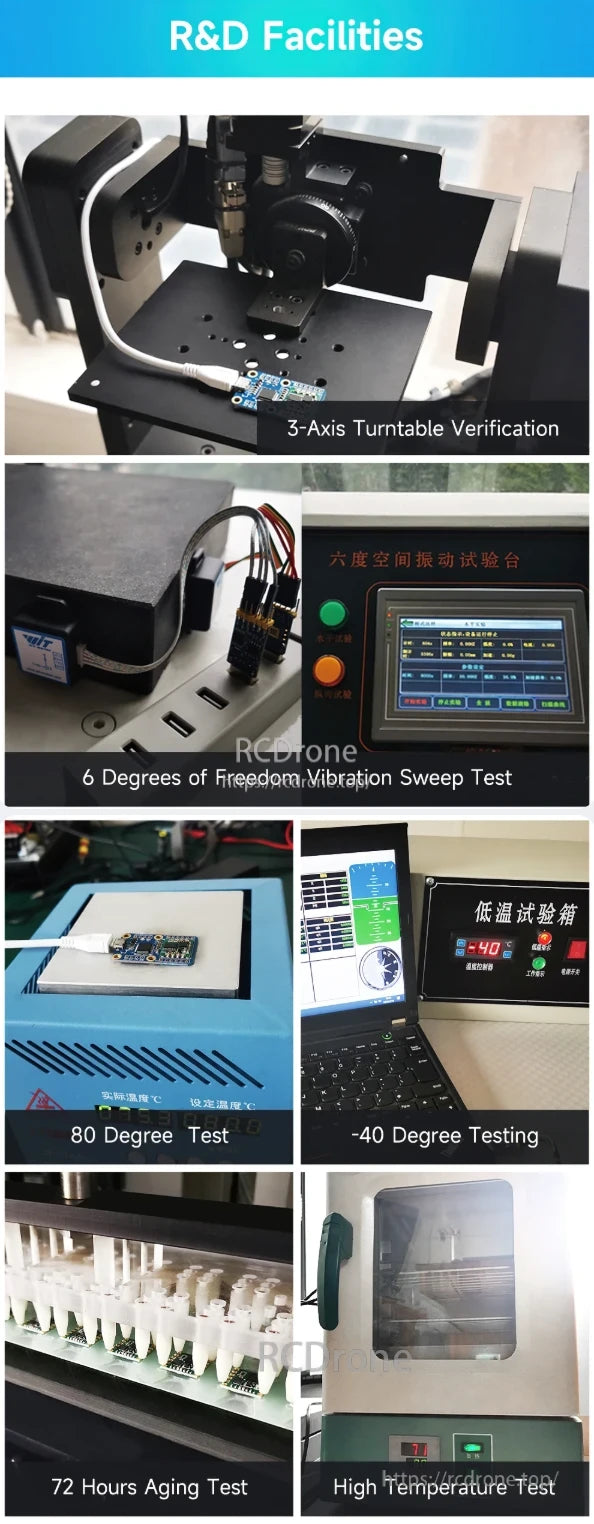
WT901B AHRS IMU는 엄격한 테스트를 거칩니다: 3축 턴테이블, 6 DOF 진동, 극한 온도(80°C에서 -40°C), 72시간 노화 및 고온 평가.
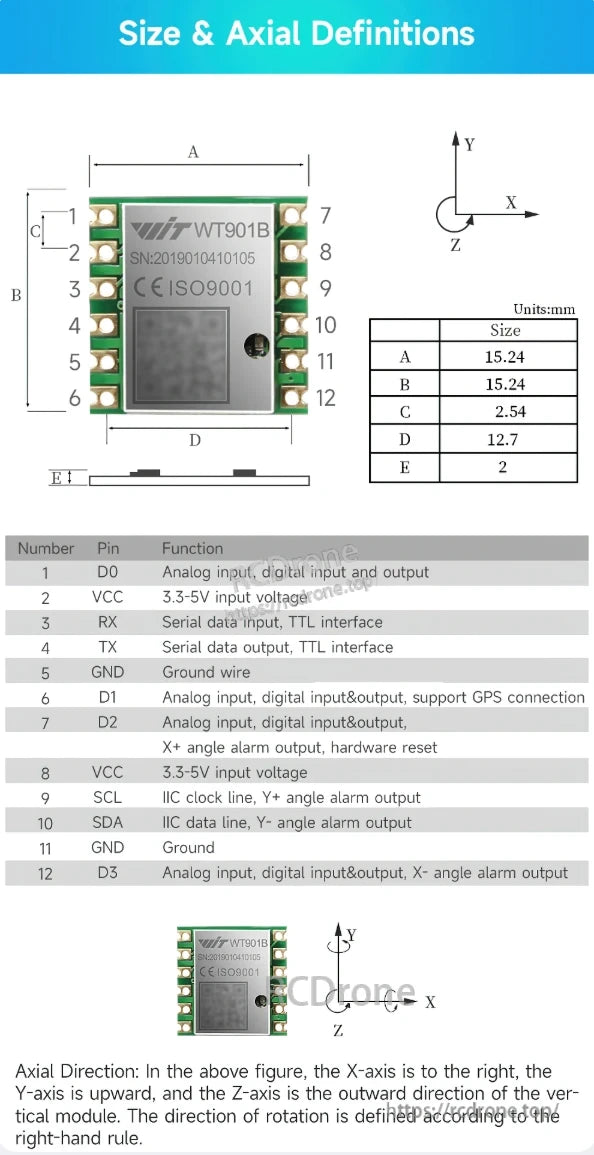
WT901B AHRS IMU의 크기: 15.24×15.24×2.54 mm, 아날로그/디지털 I/O, UART, I2C 및 알람 출력을 갖춘 12핀 레이아웃. 축 방향은 오른손 법칙에 의해 정의되며; X는 오른쪽, Y는 위쪽, Z는 바깥쪽입니다.

WITMotion의 AHRS IMU WT901B는 센서 모듈, 카탈로그, 문서 및 지원을 위한 QR 코드가 포함된 프로모션 카드가 포함되어 있습니다.