









WitMotion WT901C 9축 AHRS IMU — 가속도계, 자이로스코프, 자력계, 각도 & 쿼터니언, 0.05° 정확도, 0.2–200Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9축 AHRS IMU — 가속도계, 자이로스코프, 자력계, 각도 & 쿼터니언, 0.05° 정확도, 0.2–200Hz, TTL/RS232/RS485 Modbus
WitMotion
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
WitMotion WT901C는 3축 가속도계, 3축 자이로스코프 및 3축 자기계를 융합하여 AHRS IMU를 구성하는 컴팩트한 9축 장치입니다. WitMotion의 융합/칼만 필터링을 통해 각도(롤/피치/요), 각속도, 가속도, 자기장 및 쿼터니언을 출력합니다. 이 장치는 0.05° 정적 XY 정확도 (0.1° 동적)을 제공하며, 0.2–200 Hz 업데이트 속도를 지원하고, TTL, RS232 또는 RS485 (Modbus)를 통해 통신합니다. 자동화, 평탄화 플랫폼, VR/AR 및 산업 테스트에서 경사, 진동 및 자세 측정에 이상적입니다.
주요 특징
-
높은 정확도의 AHRS: XY 정적 0.05°, 동적 0.1°; 오른손 카르테시안 축.
-
넓은 I/O &및 전압: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (기본값 9 600).
-
구성 가능한 출력: 0.2–200 Hz (기본값 10 Hz); 사용자 선택 가능 내용.
-
전체 9축 데이터: 가속도, 각속도, 자기장, 각도 &및 쿼터니언.
-
시각화 도구: 실시간 그래프가 있는 Windows MiniIMU 소프트웨어, 원시 데이터 로깅/내보내기 (TXT), 3D 모션 데모, 및 시각적 자기 보정.
-
개발자 리소스: 드라이버 (CH340/CP2102), 매뉴얼/데이터시트, 51/C++/STM32/Arduino/Matlab용 샘플 코드, 및 안드로이드 앱.
-
유연한 설치: 수직 또는 수평 장착; 컴팩트 51 × 36 × 15 mm, ~20 g.
html
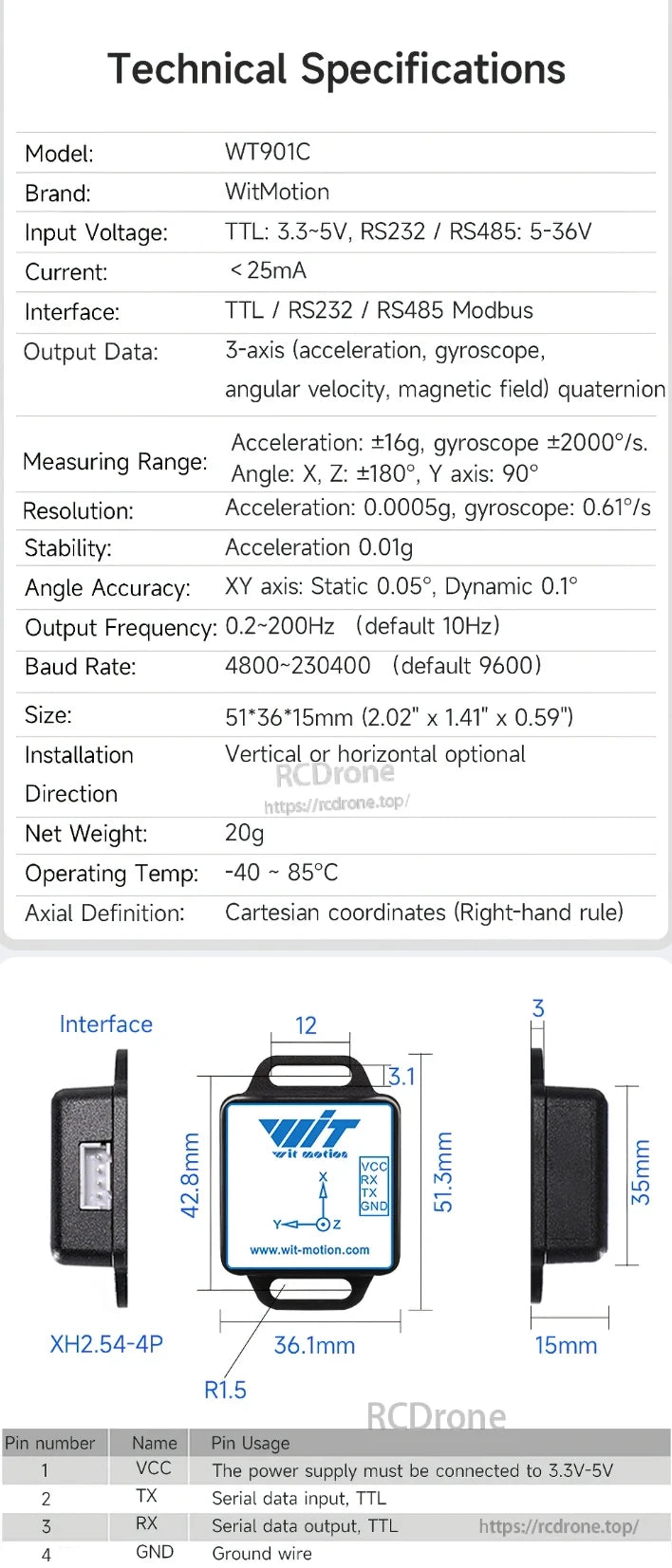
기술 사양
-
모델/브랜드: WT901C / WitMotion
-
인터페이스: TTL / RS232 / RS485 (Modbus)
-
입력 전압: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
전류: < 25 mA
-
출력 데이터: 3축 가속도, 자이로스코프 (각속도), 자기장, 각도, 쿼터니언
-
측정 범위: Acc ±16 g; Gyro ±2000 °/s; 각도 X,Z ±180°, Y 90°
-
해상도: Acc 0.0005 g; Gyro 0.61 °/s
-
안정성: Acc 0. 01 g
-
각도 정확도: XY 정적 0.05°, 동적 0.1°
-
출력 주파수: 0.2–200 Hz (기본 10 Hz)
-
전송 속도: 4 800–230 400 (기본 9 600)
-
크기 / 무게: 51 × 36 × 15 mm / ≈ 20 g
-
작동 온도: −40 ~ 85 °C
-
축 정의: 직교 좌표계, 오른손 법칙
치수 &및 커넥터 (TTL 버전)
-
본체: 51.3 mm (H) × 36.1 mm (W) × 15 mm (D); 장착 귀의 반경 R1.5
-
커넥터: XH2.54-4P
-
핀 배치 (왼쪽→오른쪽 라벨 VCC/RX/TX/GND):
-
VCC — 전원 3.3–5 V
-
TX — 직렬 데이터 입력, TTL
-
RX — 직렬 데이터 출력, TTL
-
GND — 접지
-
참고: 축 그래픽이 하우징에 인쇄되어 있습니다 (X↑, Y→, Z•), 정렬에 도움을 줍니다.
각도 출력 프로토콜 (프레임 0x55 0x53)
| 바이트 | 내용 | 의미 |
|---|---|---|
| 0 | 0x55 | 헤더 |
| 1 | 0x53 | 각도 프레임 ID |
| 2–3 | 롤L/롤H | X축 각도 |
| 4–5 | 피치L/피치H | Y축 각도 |
| 6–7 | 요L/요H | Z축 각도 |
| 8–9 | VL/VH | 펌웨어 버전 (저/고) |
| 10 | 합계 | 체크섬 |
각도 변환:롤 = ((RollH<<8)|RollL)/32768*180°피치 = ((PitchH<<8)|PitchL)/32768*180°요 = ((YawH<<8)|YawL)/32768*180°
(가속도 및 각속도 프레임은 유사합니다; 매뉴얼을 참조하십시오.)
소프트웨어 &및 도구
-
Windows (MiniIMU.exe): 장치 구성(범위, 대역폭, 출력 비율), 실시간 그래프, 원시 데이터 보기, 3D 자세 시각화, TXT로 내보내기.
-
자기 보정: 편향을 줄이기 위한 시각적 타원 맞춤 워크플로우(회전 X/Y/Z 축 주위).
-
MCU 통합: 직접 직렬 연결; TTL 권장 간단한 MCU 연결(Arduino/STM32 등)을 위한.
-
포함된 리소스: Datasheet.pdf, Manual.pdf, CH340 &및 CP2102 드라이버, 예제 코드, 안드로이드 앱, 데모 비디오.
일반적인 응용 프로그램
자동화 | 기울기/수평 모니터링 | 진동 모니터링 | 평탄화 플랫폼 | IoT 시스템 통합 | 산업 테스트 | VR/AR 헤드셋 | 소비자 전자 제품.
상세정보

0.05°의 정확도로 X 및 Y 축에서 비용 효율적인 AHRS IMU입니다. WitMotion Fusion Algorithm을 사용하여 기울기, 진동 및 자세 감지를 제공합니다. 가속도, 자이로스코프, 각도, 자기, 칼만 필터링 및 쿼터니언 기능이 포함되어 있습니다.
WitMotion WT901C IMU는 가속도계, 자이로스코프 및 자기계를 갖춘 3축 감지를 제공합니다. 쿼터니언 출력을 제공합니다. TTL, RS232, RS485를 지원합니다. ±16g, ±2000°/s, ±180° 각도를 측정합니다. 컴팩트한 51×36×15mm 크기입니다. -40에서 85°C에서 작동합니다.

WitMotion WT901C IMU는 자동화, VR 헤드셋, 수평 조정 및 진동 모니터링을 지원합니다. 소비자 전자 제품, IoT, 산업 테스트 및 AR/VR에 적합합니다. 실시간 각도 데이터 표시를 위한 무료 소프트웨어가 제공됩니다.

WitMotion WT901C IMU 설정 메뉴는 센서 보정, 데이터 출력 설정 및 실시간 모션 시각화를 제공합니다. 9축 알고리즘을 지원하며, 가속도, 자이로, 대역폭, GPS 시간대 조정이 가능합니다. 실시간 그래프는 정확한 측정을 위한 가속도와 각속도를 보여줍니다.
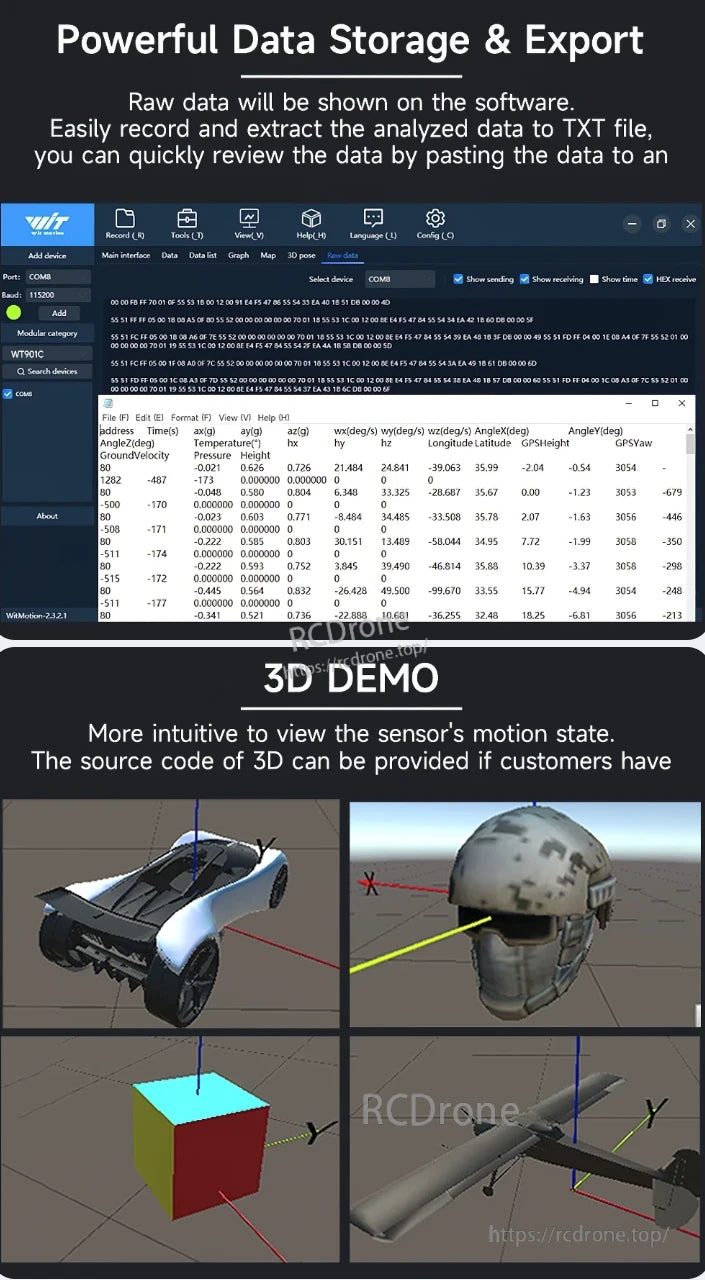
WitMotion WT901C IMU는 강력한 데이터 저장 기능, 간편한 TXT 내보내기 및 사용 가능한 소스 코드와 함께 3D 모션 시각화를 제공합니다.
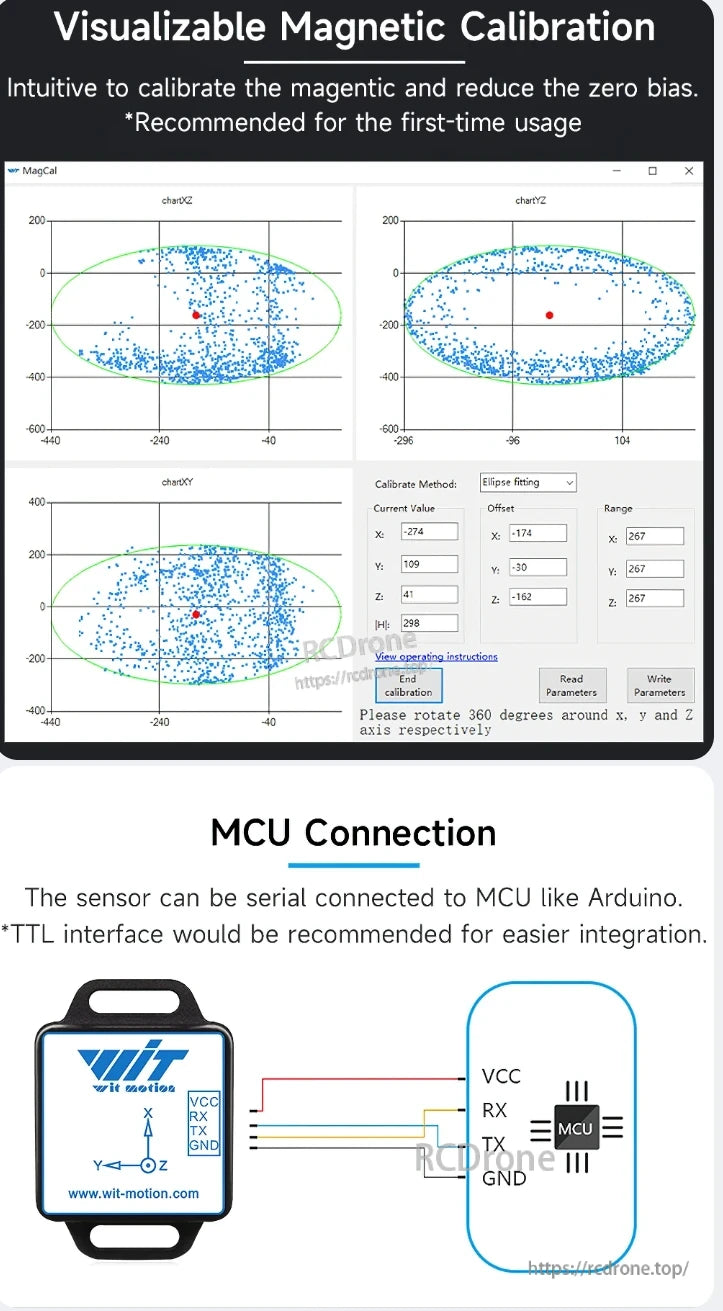
WT901C IMU의 시각화 가능한 자기 보정은 타원 맞춤 방법을 사용합니다. TTL 인터페이스를 통한 MCU 연결이 권장됩니다. 센서는 VCC, RX, TX, GND 핀을 사용하여 Arduino와 유사한 MCU에 연결됩니다.
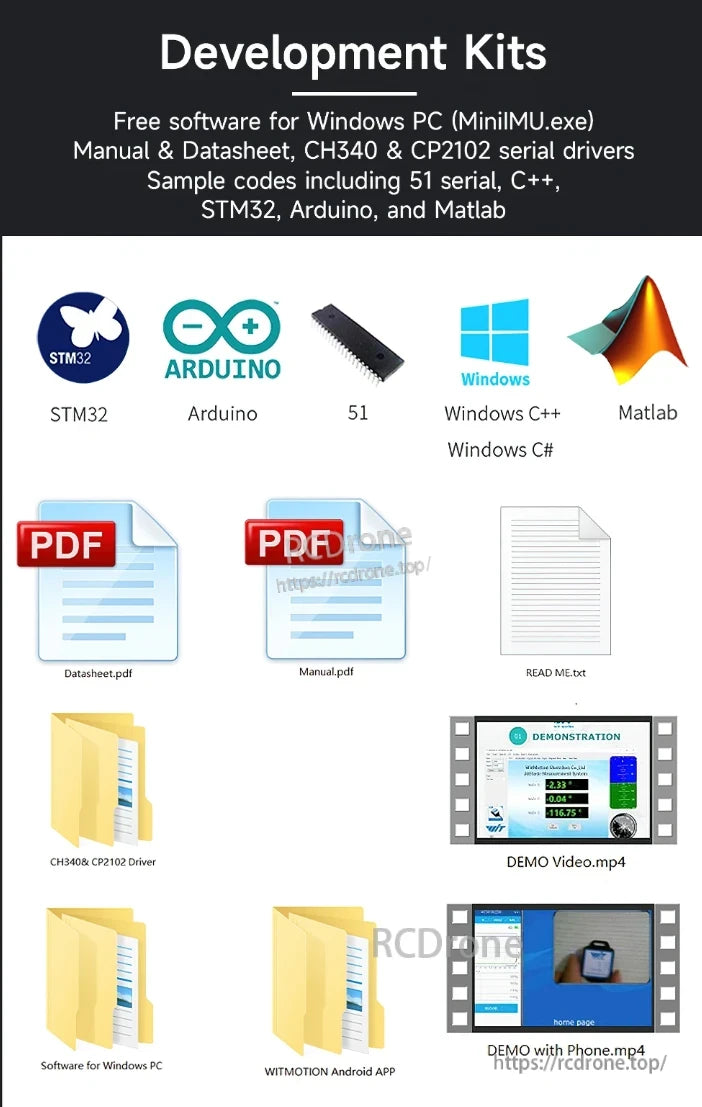
개발 키트에는 Windows용 무료 소프트웨어, 매뉴얼, 데이터 시트, CH340 & CP2102 드라이버, 51, C++, STM32, Arduino 및 Matlab용 샘플 코드, 데모 비디오 및 Android 앱이 포함되어 있습니다.
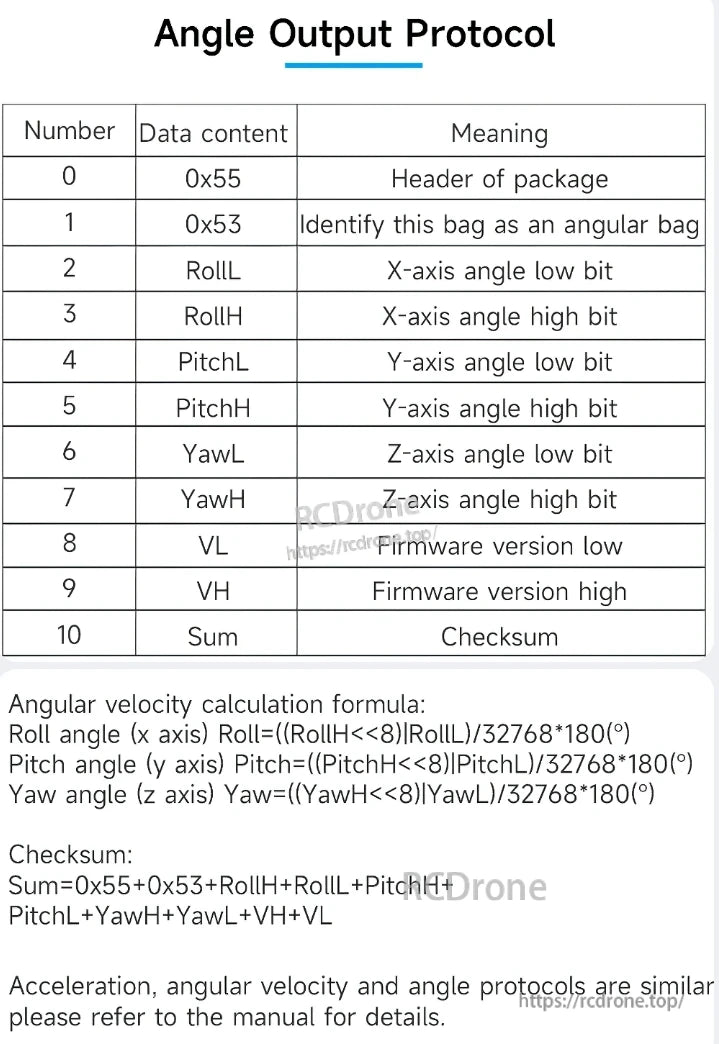
WT901C IMU 각도 출력에 대한 데이터 구조는 헤더, 롤, 피치, 요, 펌웨어 버전 및 체크섬을 포함합니다. 계산 및 검증을 위한 공식이 제공됩니다. 가속도 및 각속도에 대해서도 유사한 구조가 존재합니다.









