Yahboom YB-SD15M 15kg 시리얼 버스 스마트 서보 + 드라이버 디버깅 보드 키트 (로봇 팔 관절용)
Yahboom YB-SD15M 15kg 시리얼 버스 스마트 서보 + 드라이버 디버깅 보드 키트 (로봇 팔 관절용)
Yahboom
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
Yahboom YB-SD15M은 로봇/로봇 팔 관절을 위해 설계된 15kg 직렬 버스 스마트 서보(직렬 버스 스마트 서보)입니다. 합금/금속 기어와 금속 베어링을 사용하며, 각도 피드백을 위한 수입 고정밀 포텐셔미터가 장착되어 있습니다. 제어는 UART 직렬 포트 명령을 통해 이루어지며, 여러 개의 서보를 3핀 PH2.0 인터페이스를 사용하여 연결할 수 있으며, 역전 방지 연결 설계가 적용되어 있습니다. 각도 리드백, 조정 가능한 회전 속도 및 구성 가능한 서보 ID를 지원합니다. 설정을 간소화하고 PC 기반 매개변수 구성을 위해 일치하는 드라이버 디버깅 보드가 제공됩니다.
주요 특징
- 15KG 직렬 버스 서보; 로봇/로봇 팔 전용입니다.
- 마모와 마찰을 줄이기 위해 합금/금속 기어 세트와 금속 베어링을 사용하여 부드럽게 회전합니다.
- 각도 피드백을 위해 수입된 고정밀 포텐셔미터가 사용됩니다(안정적인 동작을 위한 높은 선형성/진행).
- 각도 리드백 지원(서보 각도 피드백).
- ID 인식 / 버스 통신: 각 서보는 ID(기본값 1)를 가지며, 구성 가능; 단일 버스 통신; 전송 속도 115200.
- 역방향 연결 방지 설계가 적용된 3핀 PH2.0 직렬 버스 인터페이스; 캐스케이드 배선(다수의 서보 지원)을 지원합니다.
- 서보 디버깅 소프트웨어를 통해 회전 속도 및 위치 편차를 포함한 매개변수 구성을 지원합니다.
- 주 및 보조 금속 조타 디스크(더 내구성이 뛰어나고 마모 저항성이 높음).
- 이중 축 고정 설계: 동력 출력 샤프트(PTO 샤프트) + 보조 고정 샤프트로 보다 안정적인 조인트 움직임을 제공합니다.
- 드라이버 디버깅 보드는 두 개의 병렬 버스 서보 드라이브 인터페이스를 제공하며, USB 및 DC 전원 입력을 추가로 지원합니다.
- Raspberry Pi, Jetson Nano, UNO, Micro:bit, STM32 MCU 및 51 MCU에 대한 참조 제어 코드/리소스가 제공됩니다.
사양
서보 (YB-SD15M 스마트 직렬 버스 서보)
| 제품명 | YB-SD15M 스마트 직렬 버스 서보 |
| 브랜드 | 야붐 |
| 제품 무게 | 50 ± 1 g |
| 작동 전압 | 6.0~7.4 V |
| 제품 크기 | 58.4*20*40.00 mm |
| 제어 방법 | UART 직렬 포트 명령 |
| 통신 전송 속도 | 115200 |
| 잠금 토크 | >= 15 kgf.cm at 7.4 V |
| 회전 범위 | 300° ± 15° (96~4000) |
| 제어 각도 범위 | 300° ± 15° (96~4000) |
| 회전 속도 | <= 0.30 초/60° at 7.4 V |
| 서보 정확도 | <= 1° |
| 무부하 전류< | <= 310 mA at 7.4 V |
| 잠금 로터 전류 | <= 3.2 A at 7.4 V |
| 서보 ID | 1~250, 기본값 1 |
| 저장 | 전원이 꺼질 때 서보 설정이 자동으로 저장됩니다. |
| 보호 | 3초 동안 잠금 및 보호 모드로 진입 |
| 파라미터 피드백 | 비정상 피드백, 위치 |
| 기어 유형 | 금속 기어 세트 |
| 인터페이스 모델 | PH2.0-3핀 |
| 일치하는 선 길이 | 20 cm |
| 적용 장면 | 로봇 팔, 생체 로봇 관절 |
| 피드백 기능 | 서보 위치, 상태 및 기타 정보를 읽어오는 것을 지원합니다. |
표시된 도면 값 (단위: mm): 35.12, 28.4, 23, 18.20, 40.20, 44.02, 10.66, 및 φ6.
표시된 추가 리소스: 15kg 스마트 직렬 버스 서보 3D 모델 파일 제공.
드라이버 디버깅 보드
| 넓은 전압 입력 | 7.4 V~12.6 V |
| 서보 인터페이스 출력 전압 | 6.3 V (+0.2) |
| 서보 인터페이스 출력 전류 | 1.2 A (최대: 2 A) |
| 크기 | 50 mm * 35 mm * 12.5 mm |
| 고정 홀 간격 | 30 mm |
| 고정 홀 직경 | 3 mm |
| 인터페이스 / 마킹 | DC 전원 인터페이스 (양극/음극), USB 인터페이스, 서보 인터페이스, 핀 헤더 간격 2.54 |
브래킷 치수
| 서보 고정 브래킷 크기 | 50*30*28 mm |
| 서보 고정 브래킷 판금 두께 | 2 mm |
| 서보 고정 브래킷 주의 사항 | 4-M3 나사 구멍; 2-φ2 관통; 4-φ3 관통 |
| 서보 샤프트 브래킷 크기 | 43*21*57 mm |
| 서보 샤프트 브래킷 판금 두께 | 2 mm |
포함된 항목
- YB-SD15M 15kg 시리얼 버스 스마트 서보
- 드라이버 디버깅 보드
- 데이터 케이블
- 서보 고정 브래킷
- 서보 샤프트 브래킷
- 금속 러더
- 금속 보조 러더 디스크 / 베어링
- PH2.0 3핀 케이블 (케이블 길이: 20 cm)
- 나사 팩(t)
설정 도움말(배선, UART 제어, ID 구성 및 다중 서보 연결)에 대한 문의는 [email protected] or를 방문하십시오 https://rcdrone.top/ .
응용 프로그램
- 로봇 팔 및 생체 로봇 관절
- 다중 서보 조인트 제어(연결된 직렬 버스 서보)
- 서보 교육 / 마스터-슬레이브 동기화 동작
- 동작 그룹 학습(사례 전시 자료에 표시된 대로)
매뉴얼
튜토리얼: Yahboom 15KG 직렬 버스 스마트 서보
세부정보

로봇 관절을 위해 설계된 YB-SD15M은 내구성이 뛰어난 금속 기어와 포텐셔미터 각도 피드백 및 간단한 3핀 버스 배선을 결합합니다.
참조 제어 리소스는 Raspberry Pi, Jetson Nano에서 Arduino 및 STM32에 이르기까지 인기 있는 보드에서 빠르게 시작할 수 있도록 도와줍니다.

핵심 하드웨어 세부 사항은 부드럽고 긴 수명의 움직임에 중점을 둡니다: 금속 베어링, 합금 기어 및 고선형 각도 피드백.

각도 리드백 및 구성 가능한 ID는 다중 서보 버스 제어를 쉽게 하며, 이중 샤프트 설계는 관절 안정성을 향상시킵니다.

동기화된 마스터/슬레이브 설정 및 하나의 버스에서 다중 관절 제어를 포함한 조정된 로봇 팔 움직임에 이상적입니다.
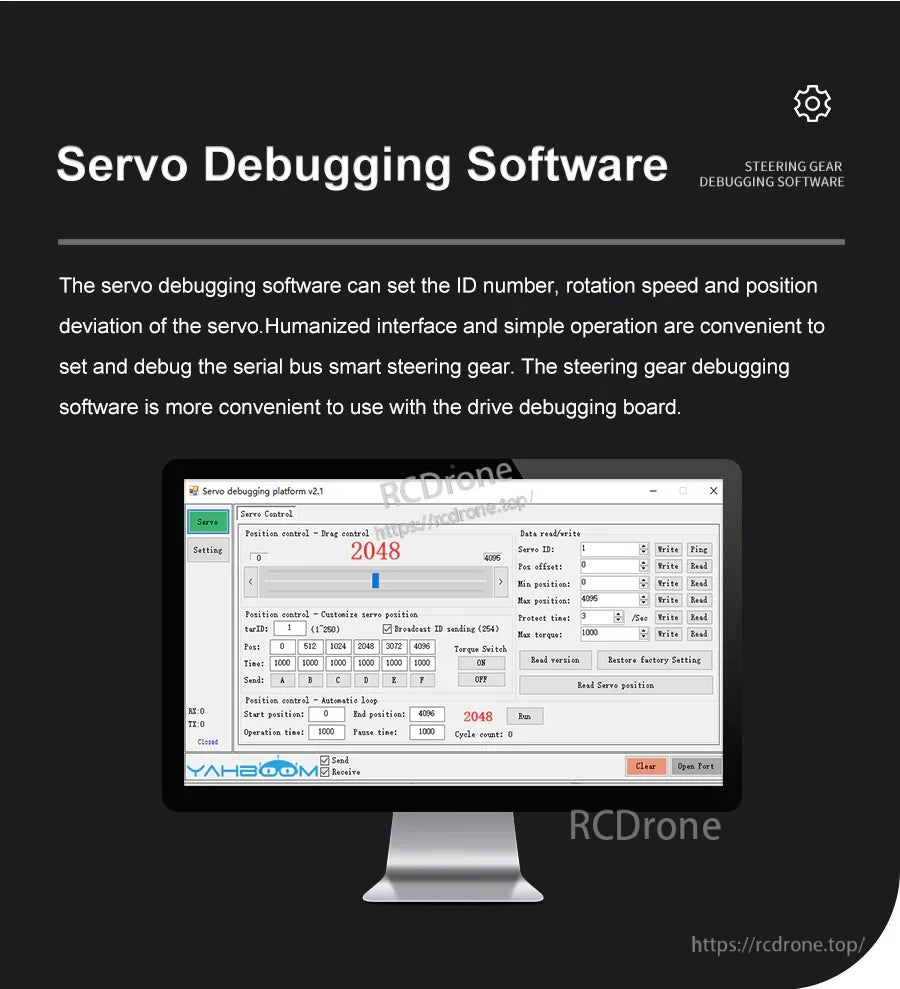
PC 디버깅 소프트웨어는 서보 ID 변경, 속도 조정 및 위치 오프셋 수정과 같은 빠른 설정 작업을 지원합니다.

기계 도면 및 주요 매개변수는 서보를 컴팩트한 관절 구조에 통합하기 위한 크기 지침을 제공합니다.
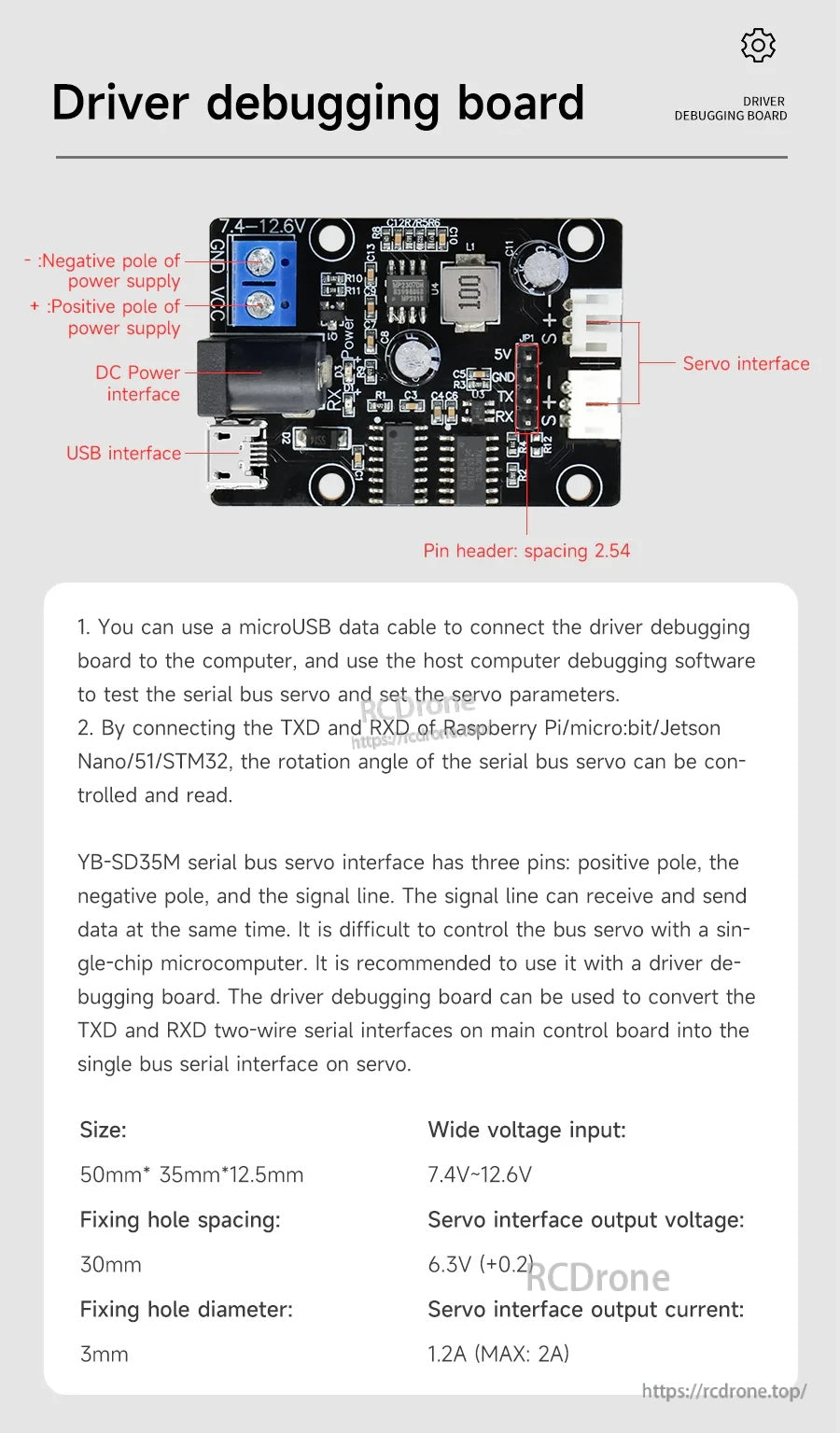
포함된 드라이버 보드는 테스트 및 설정 중 버스-서보 배선을 위한 편리한 USB 연결 및 이중 인터페이스를 추가합니다.

배선, 구성 및 직렬 명령 제어를 지원하기 위해 튜토리얼 링크, 소프트웨어 및 문서가 제공됩니다.
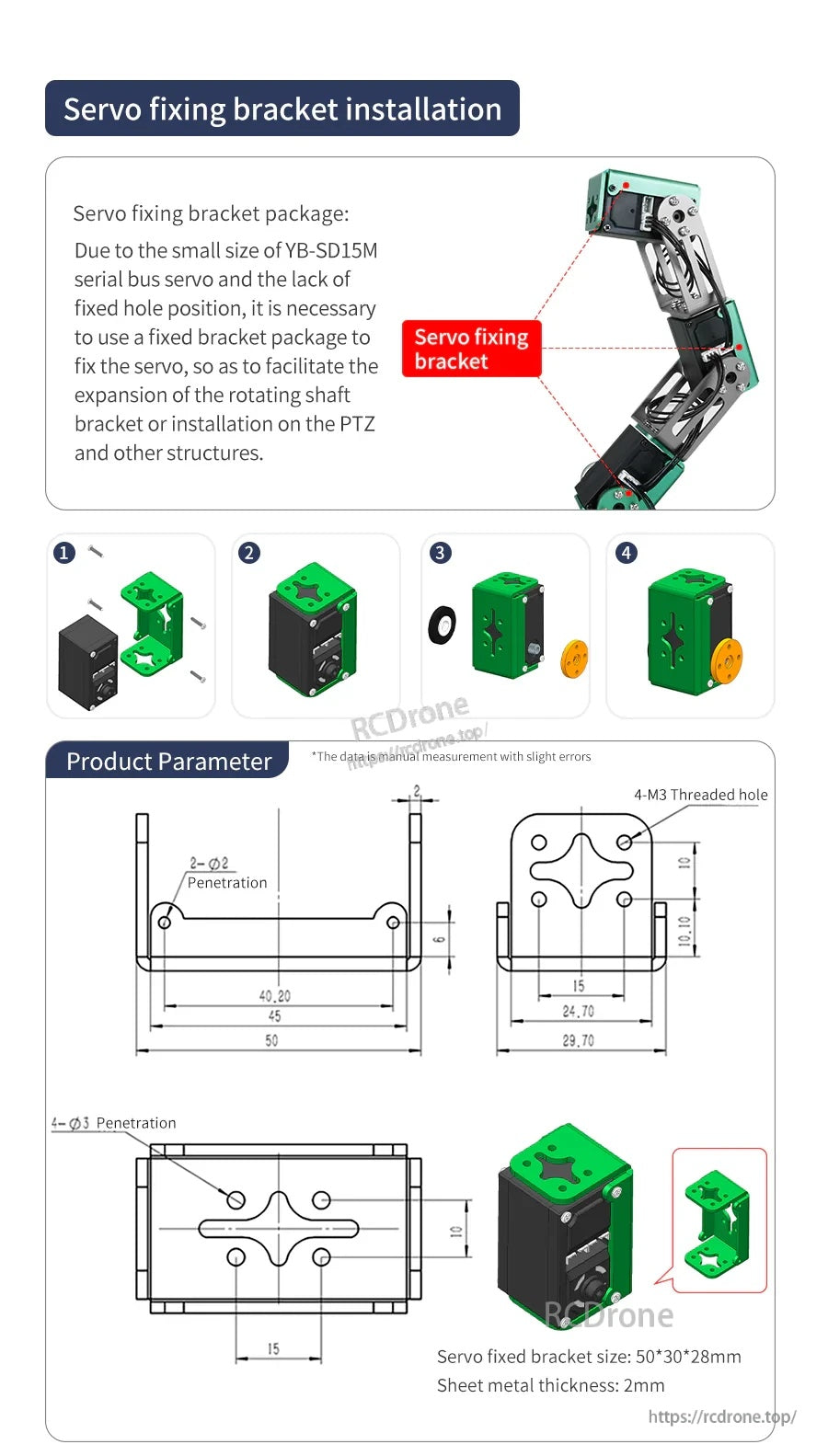
선택적 고정 브래킷은 출력 샤프트를 연장하거나 맞춤형 링크를 구축할 때 서보를 안전하게 장착하는 데 도움을 줍니다.

샤프트 브래킷 옵션은 로봇 팔 및 관절 구축을 위한 연장 구조물과 더 안정적인 장착을 지원합니다.