







AT8236/TB6612FNG 2채널 모터 드라이브 모듈(로봇 자동차용), 5-12V 입력, 3A/6A, 엔코더
AT8236/TB6612FNG 2채널 모터 드라이브 모듈(로봇 자동차용), 5-12V 입력, 3A/6A, 엔코더
Yahboom
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
이 2채널 모터 드라이브 모듈 (AT8236/TB6612FNG)은 두 개의 DC 모터(기어 모터 및 인코더 모터 포함)를 구동하도록 설계되었습니다. AT8236 기반 모듈은 홀 인코더가 있는 2채널 모터를 동시에 구동할 수 있으며, 5-12V 전원 입력을 지원하고 입력 역접속 보호 기능이 포함되어 있습니다. 또한 외부 전원 출력을 위한 전압 조정기(5V/3A 또는 3.3V/500mA)와 실시간 공급 전압 읽기를 위한 온보드 VM 전압 감지 회로를 통합하고 있습니다. 여러 모듈을 직렬로 전원 공급하여 2WD/4WD/MWD 스마트 자동차 프로젝트를 구축할 수 있습니다.
주요 특징
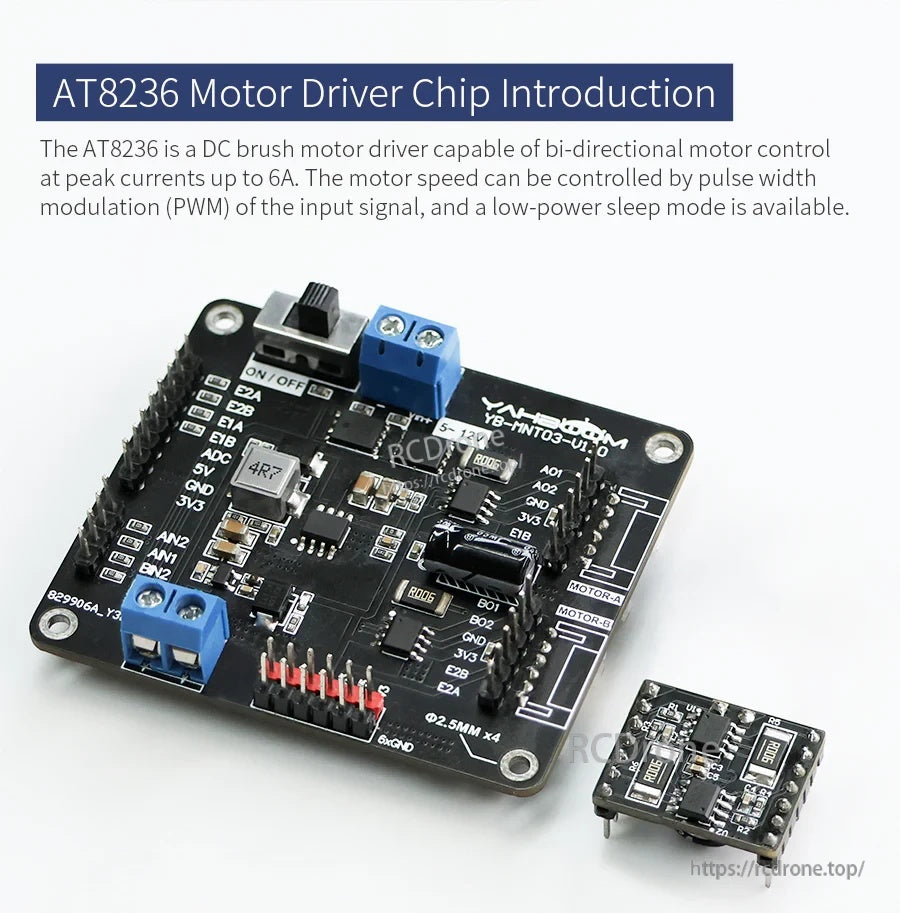
- AT8236 드라이버 칩 옵션은 양방향 DC 모터 제어를 지원하며, PWM을 통한 속도 제어와 저전력 슬립 모드를 지원합니다.
- DC 기어 모터 및 인코더가 있는 모터를 지원합니다.
- 전문 회로 설계 기능: 역접속 보호, 전압 안정화 회로 및 전압 감지 회로가 포함되어 있습니다.
- AT8236 기반 모듈에 명시된 보호 기능: 과전류 보호, 단락 보호, 저전압 잠금, 및 과온도 보호.
- 지정된 전원 인터페이스: KF301-2P, 5.08 mm 간격, 수직형; 모듈 연속 연결을 위한 입력 및 출력을 모두 지원합니다.
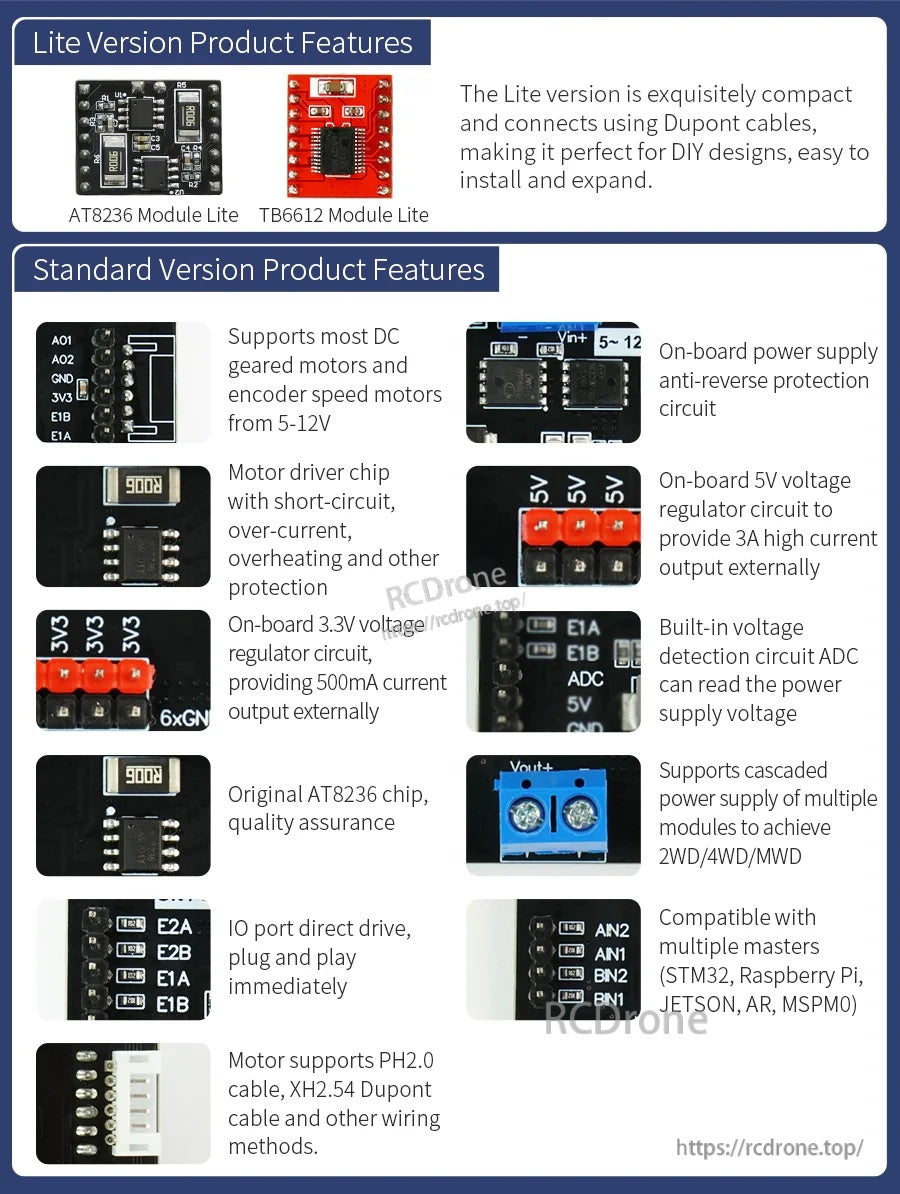
- 표준 버전의 특징: 5V 레귤레이터가 3A 고전류 출력을 제공; 3.3V 레귤레이터가 500mA 출력을 제공; 내장 ADC 전압 감지; 홀 인코더 인터페이스; 5V/3.3V 출력 인터페이스.
- 라이트 버전의 특징: 설치 및 확장을 용이하게 하기 위해 Dupont 케이블을 사용한 컴팩트한 디자인 및 연결.
- 호환되는 컨트롤러: STM32, Raspberry Pi 4B/3B, Jetson Nano, RDK-X3, Raspberry Pi Pico, AR, MSPM0 및 기타 개발 보드.
- 장착 주의 사항: 나사 구멍 위치는 Raspberry Pi에 해당합니다.
사양
AT8236 기반 모듈 (제공된 설명에서)
| 전원 입력 | 5-12V |
| 역접속 방지 보호 | 지원됨 |
| 조정된 출력 | 5V/3A 또는 3.3V/500mA |
| 정격 구동 전류 (단일 회로 모터) | 3.6A |
| 최대 피크 전류 | 6A |
| 보호 기능 | 과전류, 단락, 저전압 잠금, 과열 |
| VM 전압 감지 | 지원됨 (실시간 공급 전압 읽기) |
| 모듈 연결 | 지원됨 (2WD/4WD 및 기타 스마트 자동차 구성) |
제품 매개변수 비교 (나열된 대로)
| 매개변수 | TB6612 모터 드라이버 모듈 라이트 버전 | AT8236 모터 드라이버 모듈 라이트 버전 | AT8236 모터 드라이버 모듈 스탠다드 버전 |
|---|---|---|---|
| 제품 크기 | 18.5*20.8mm | 23*18.2mm | 65*56mm |
| 무게 (핀 헤더 포함) | 3.2g | 3.5g | 22g |
| 기능 | 두 개의 모터를 동시에 전진 및 후진 구동할 수 있습니다. | 두 개의 모터를 동시에 전진 및 후진 구동할 수 있으며, 구동 용량은 TB6612보다 훨씬 큽니다. | 두 개의 모터를 동시에 전진 및 후진 구동할 수 있으며, 구동 용량은 TB6612보다 훨씬 큽니다. |
| 칩 패키지 (상기 목록과 같이) | SSOP24 | ESOP-8 | ESOP-8 |
| PWM 입력 주파수 | 0-100Khz | 0-100Khz | 0-100Khz |
| 출력 채널 | 4 | 2 | 2 |
| 단일 연속 구동 전류 | 1.2A | 3A | 3A |
| 단일 회로의 최대 피크 전류 | 3.2A | 6A | 6A |
| VM 전원 공급 범위 | 2.5V | 5V-17V | 5V-17V |
| 보호 기능 | 과전류 보호, 과온도 보호 | 과전류 보호, 과온도 보호, 단락 보호, 저전압 잠금 | 과전류 보호, 과온도 보호, 단락 보호, 저전압 잠금 |
| 기타 기능 | 없음 | 없음 | 공급 전압 샘플링, 홀 인코더 인터페이스, 5V/3.3V 출력 인터페이스 |
| 제어 신호 핀 | 모터를 전진, 후진 및 속도 제어를 위해 1채널 PWM 및 2채널 통신 IO 포트가 필요합니다. | 모터를 전진, 후진 및 속도 제어를 위해 2채널 PWM이 필요합니다. | 모터를 전진, 후진 및 속도 제어를 위해 2채널 PWM이 필요합니다. |
| 논리 입력 기준 수준 | 논리 기준 수준에 대한 외부 접근이 필요합니다. | 표준 버전은 외부 논리 공급 또는 기준 전압이 필요하지 않습니다. |
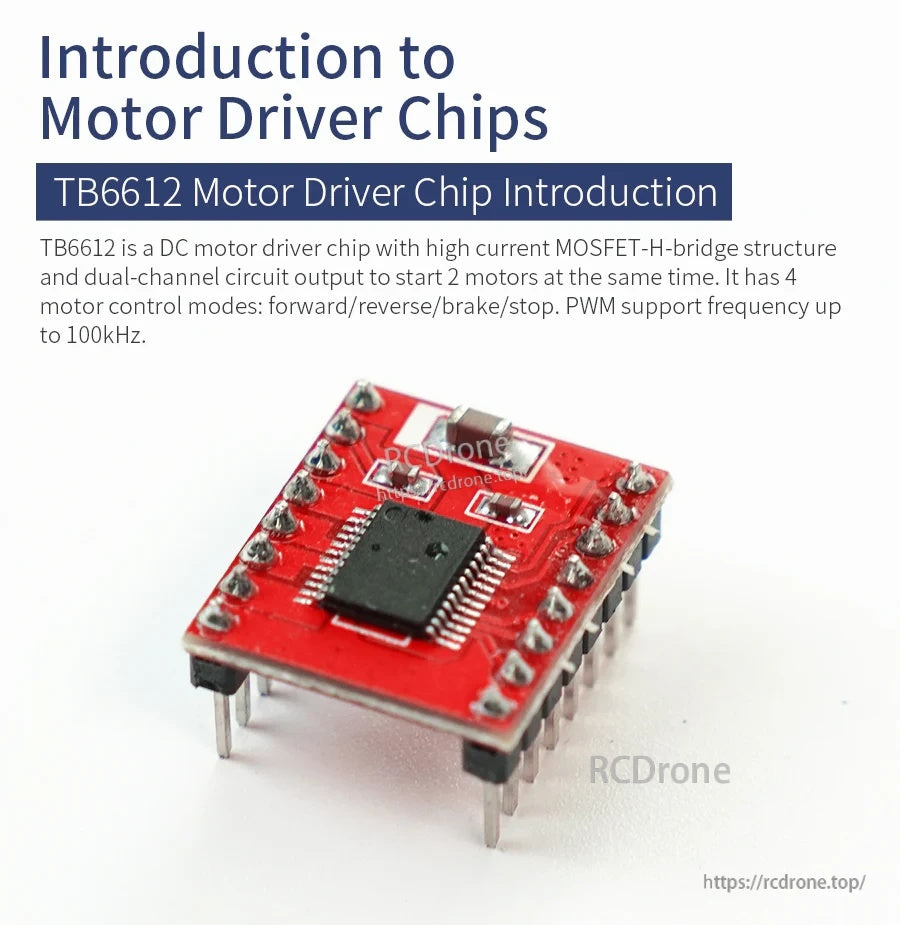
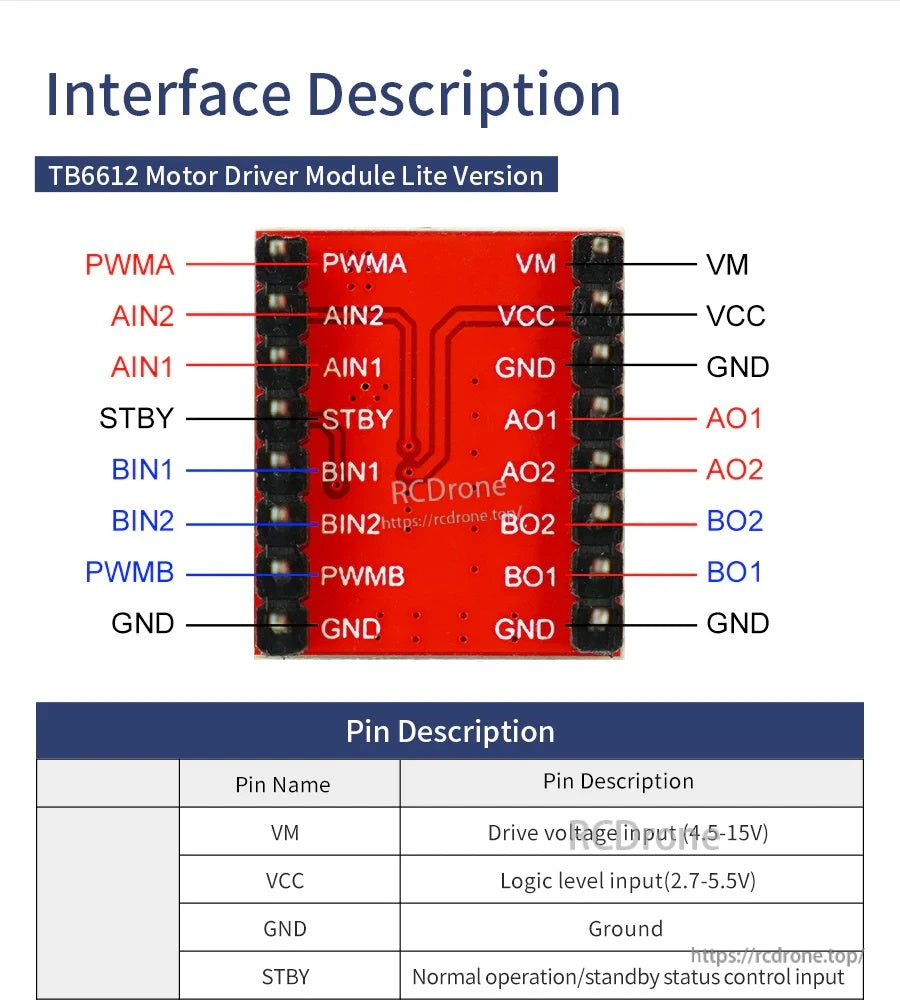
TB6612 모터 드라이버 모듈 라이트 버전 (인터페이스 설명)
- 핀 레이블: PWMA, AIN2, AIN1, STBY, BIN1, BIN2, PWMB, GND; VM, VCC, GND, AO1, AO2, BO2, BO1, GND.
| 핀 이름 | 설명 (표시된 대로) |
|---|---|
| VM | 구동 전압 입력 (4.5-15V) |
| VCC | 로직 레벨 입력 (2.7-5.5V) |
| GND | 접지 |
| STBY | 정상 작동/대기 상태 제어 입력 |
응용 프로그램
- 스마트 자동차 / 2WD / 4WD / MWD 모바일 로봇 플랫폼 (모듈 연속 지원).
- 전자 설계 경진대회 프로젝트.
- 적합한 모터 목록: TT DC 기어 모터, 인코더가 있는 TT 모터, 520 모터, 310 모터 및 시중의 대부분의 다른 DC 기어 모터 및 인코더 속도 모터.
전원 공급 방법: DC5V-12V 광범위 전압 전원 입력을 지원하며 7.4V 배터리 팩 및 12V 배터리 팩 전원 공급 사용을 지원합니다.
패키지 옵션
- TB6612 라이트
- AT8236 라이트
- AT8236 스탠다드
- AT8236 스탠다드 + 전원 케이블
- AT8236 스탠다드*2 + 전원 케이블*2
선택 안내 또는 Raspberry Pi/STM32 및 기타 컨트롤러와의 통합 지원을 원하시면 [email protected] or에 문의하시거나 https://rcdrone.top/.
튜토리얼
상세정보
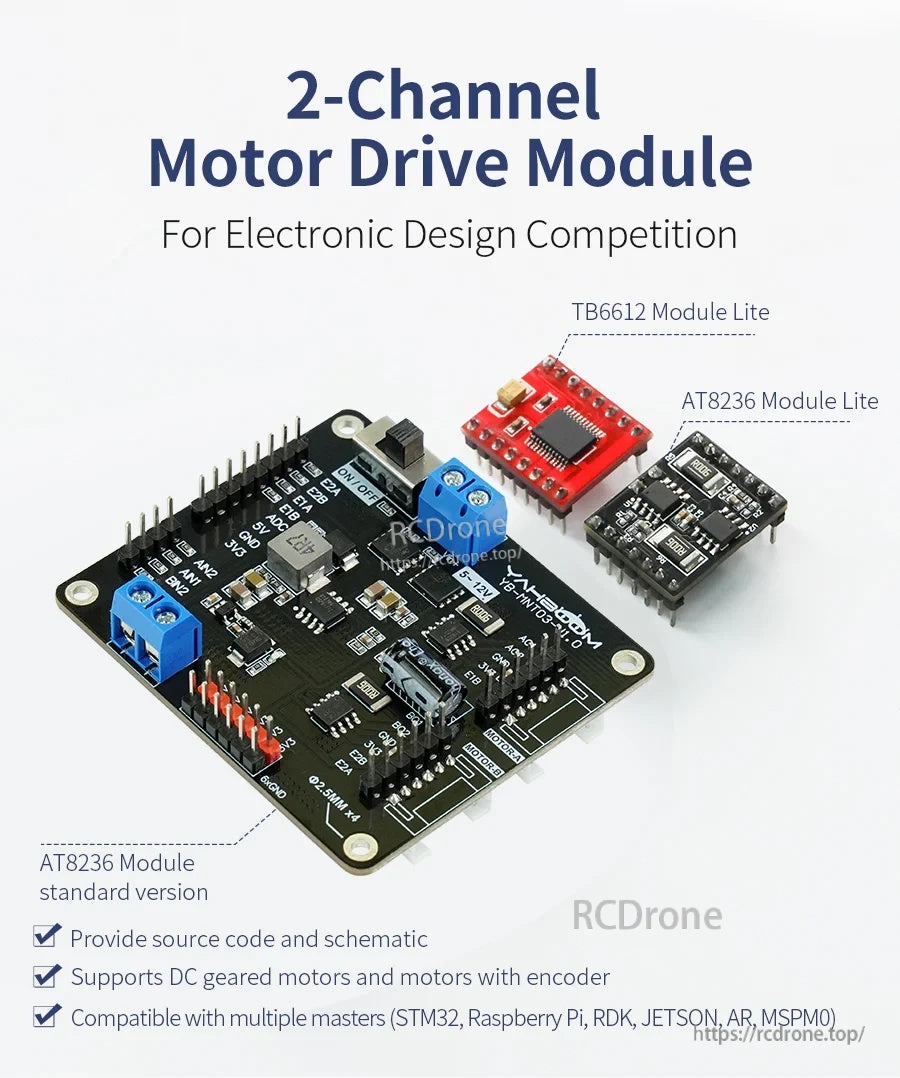
전체 기능을 갖춘 AT8236 스탠다드 보드와 컴팩트한 라이트 모듈 중에서 선택하세요. 로봇 빌드에 적합합니다.
TB6612FNG 라이트 보드는 두 개의 DC 모터에 대한 기본 전진/후진 제어를 위한 컴팩트한 옵션입니다.
AT8236 기반의 스탠다드 버전은 스마트 카 및 인코더 프로젝트를 위한 더 풍부한 전원 및 인터페이스 기능을 추가합니다.
통합 보호 기능, 조정된 5V/3A 및 3.3V/500mA 출력 및 VM 전압 감지가 배선 및 디버깅을 간소화하는 데 도움을 줍니다.

빠른 매개변수 비교를 통해 드라이버 버전을 모터 전류, 공간 및 제어 요구 사항에 맞출 수 있습니다.
인코더 유형을 포함한 인기 있는 TT 모터 및 많은 소형 금속 기어 모터와 호환됩니다.





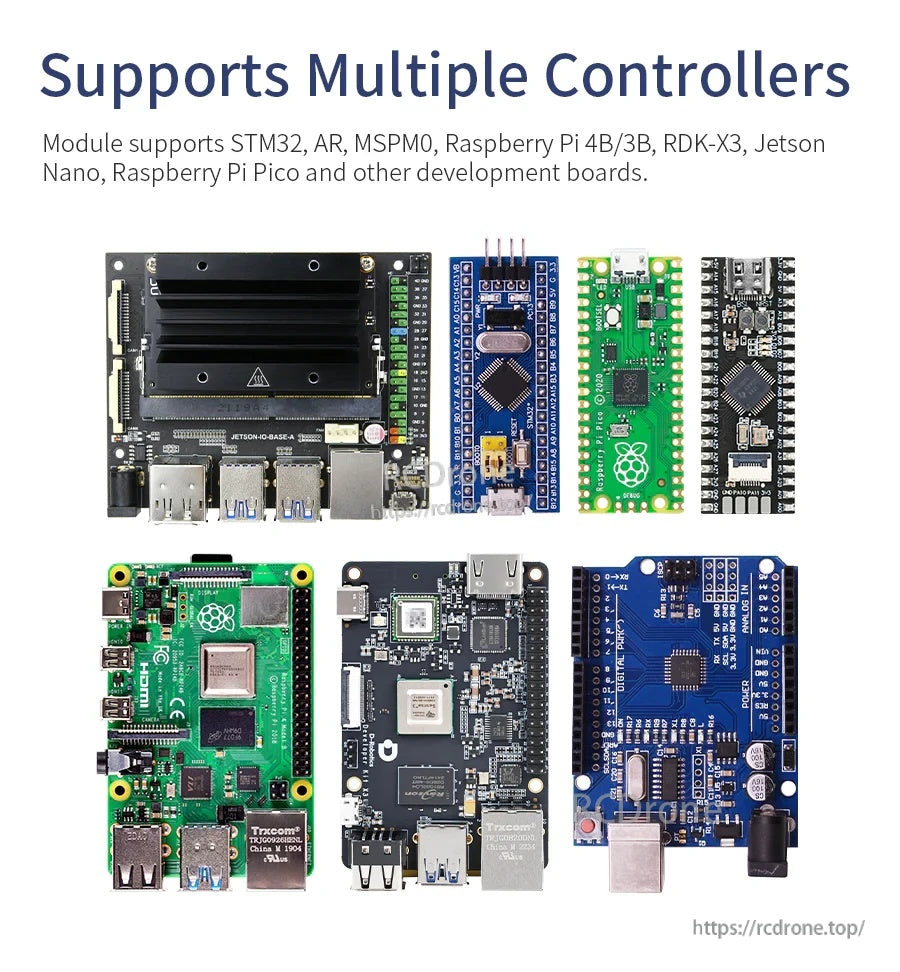
마이크로컨트롤러에서 SBC에 이르기까지 다양한 컨트롤러와 함께 작동하여 로봇 스택에 쉽게 통합할 수 있습니다.
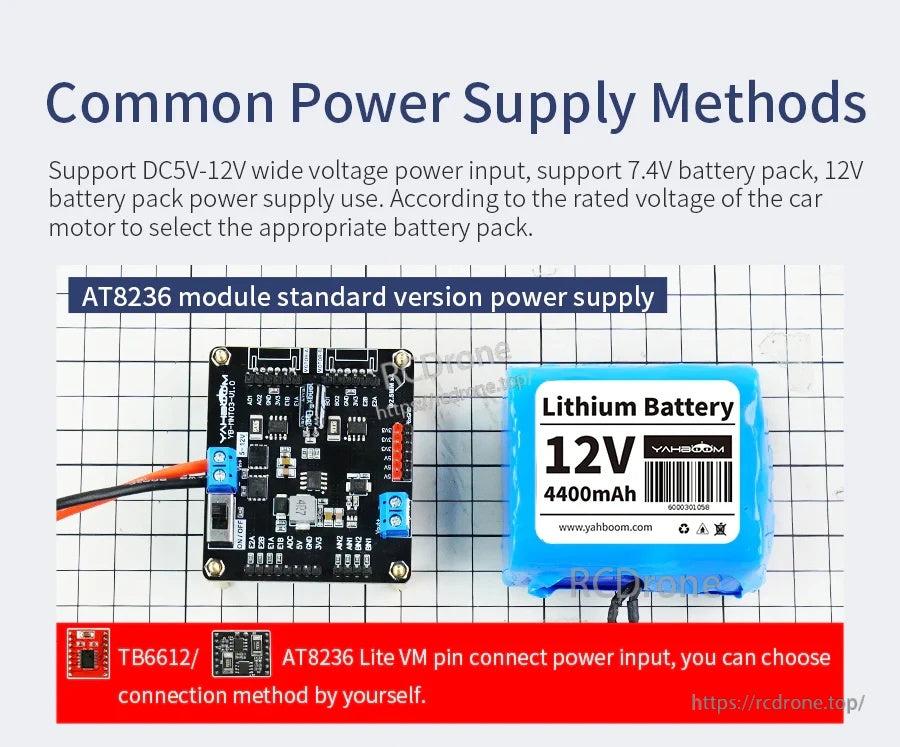
스마트 자동차 프로젝트에서 일반적으로 사용되는 배터리 팩을 포함하여 5–12V DC 전원으로 모듈에 전원을 공급합니다.
명확한 핀 레이블링으로 PWM 속도 제어, 방향 입력 및 두 개의 모터 출력 채널을 쉽게 배선할 수 있습니다.
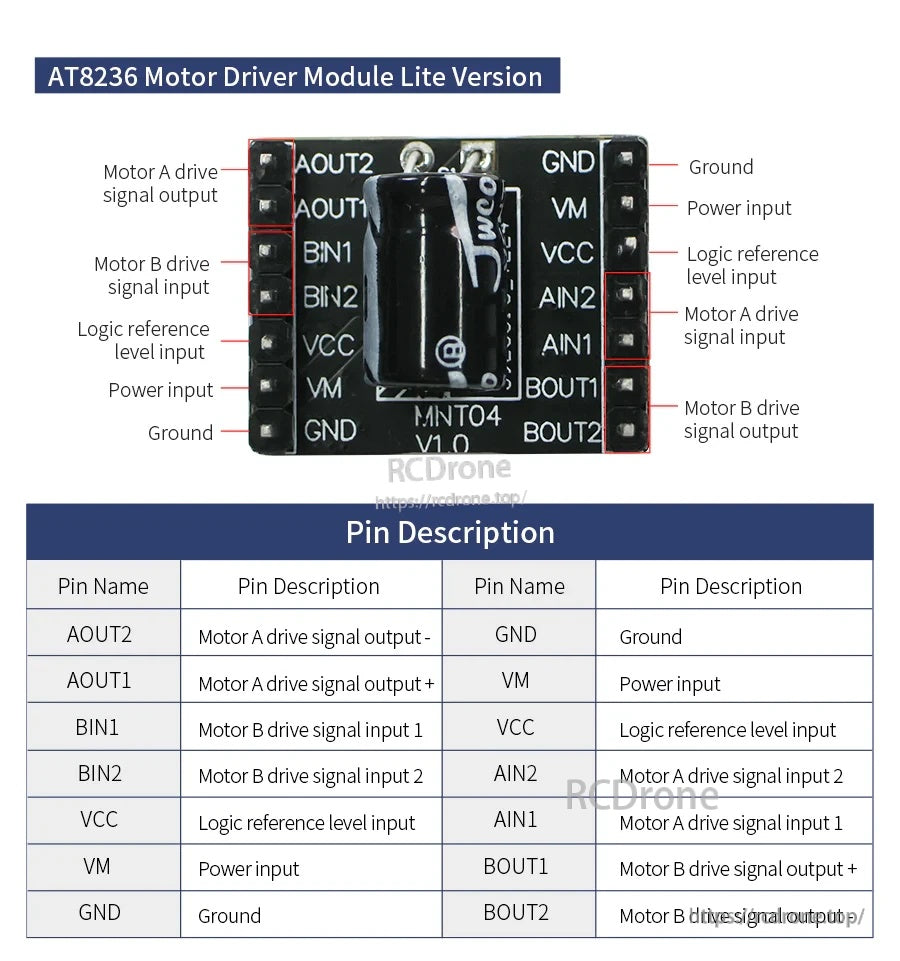
AT8236 Lite 보드는 두 개의 DC 모터에 대한 양방향 제어를 지원하면서 배선을 간단하게 유지합니다.
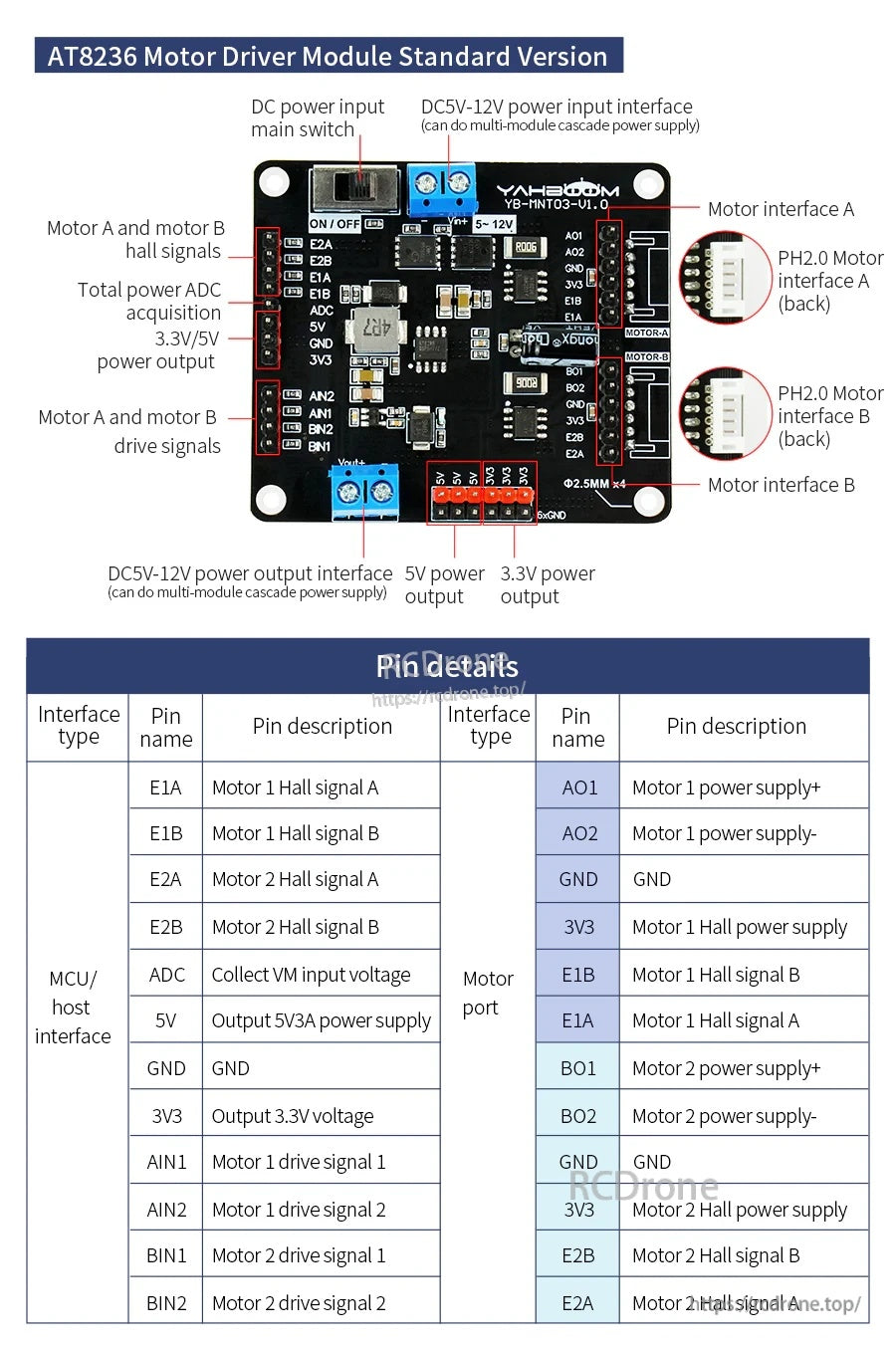
표준 버전은 모터 포트와 홀 인코더 인터페이스 및 주변 장치용 조정된 전원 출력을 제공합니다.
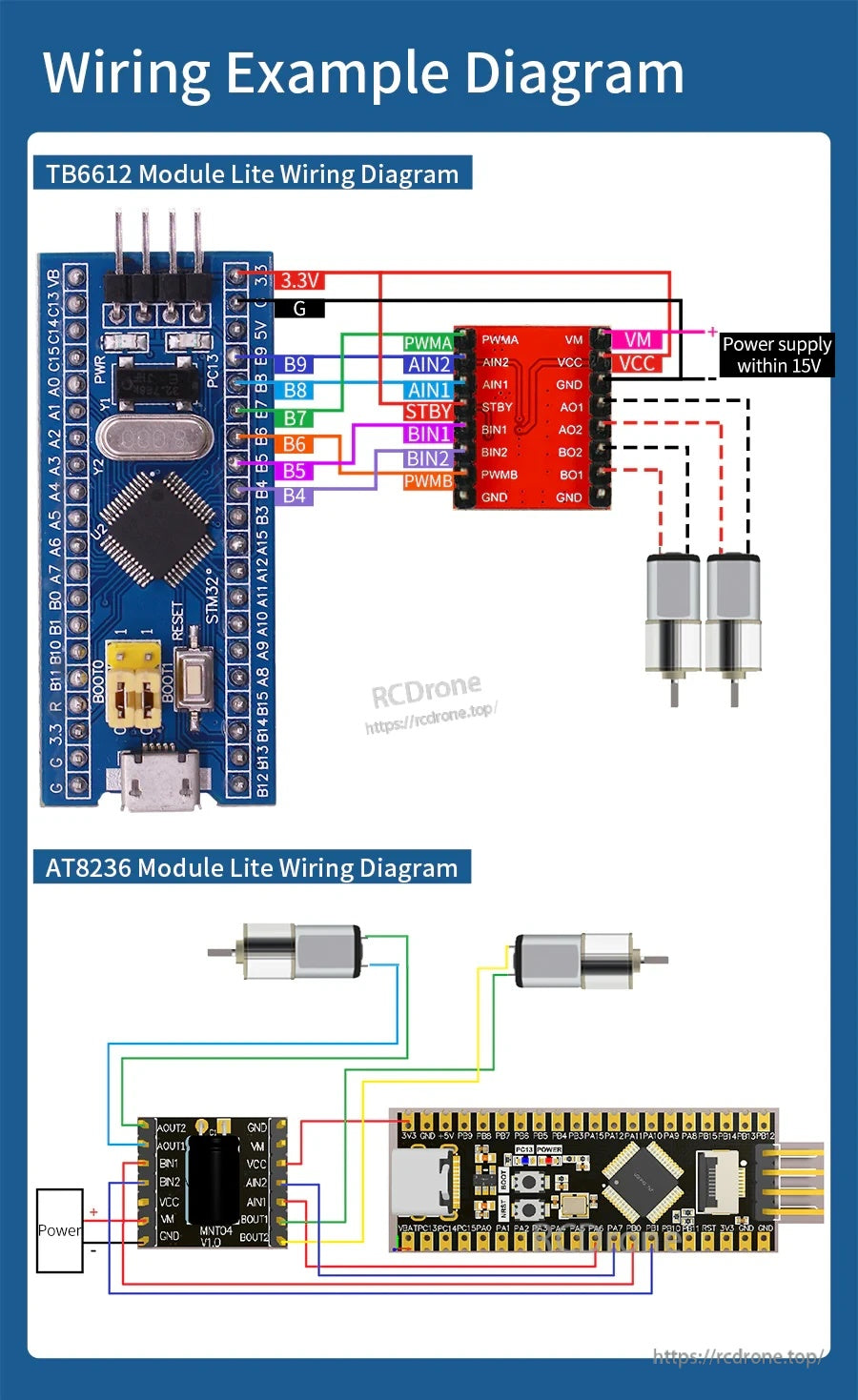
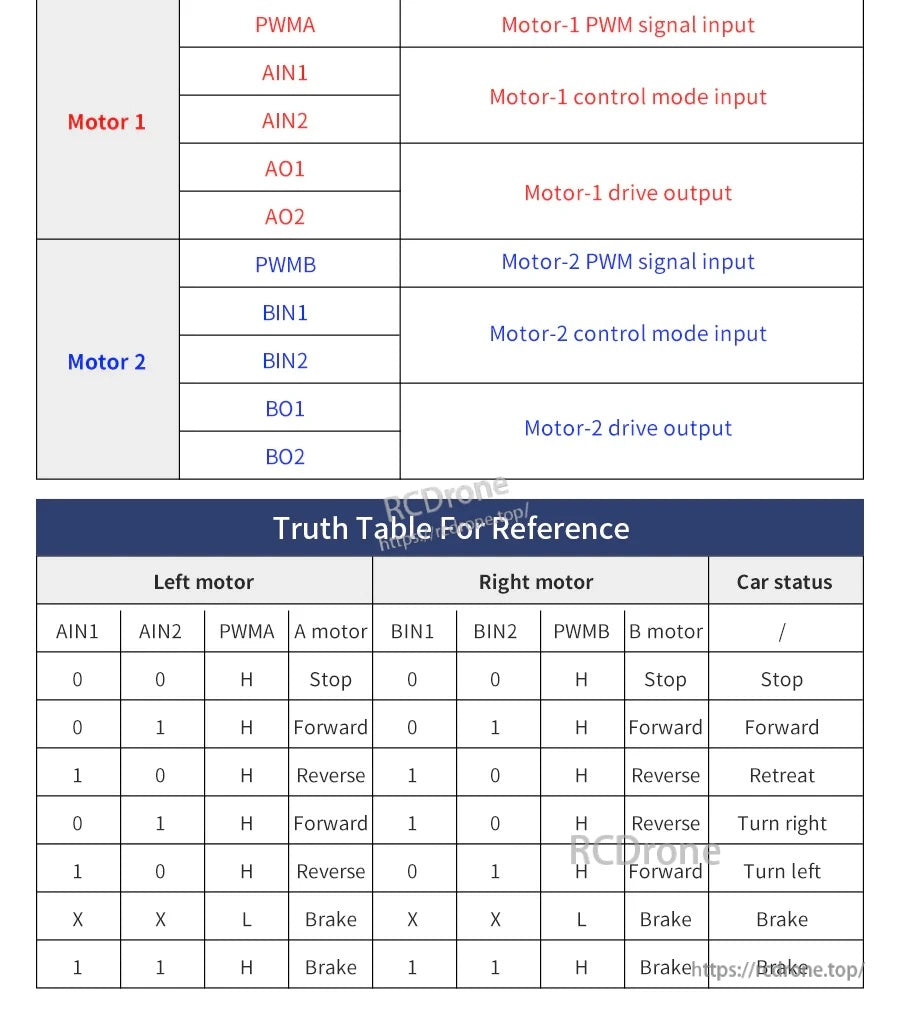
TB6612FNG 배선은 PWMA/PWMB, AIN1/AIN2, BIN1/BIN2 및 STBY 제어 라인과 두 개의 DC 모터를 위한 별도의 모터 전원 및 GND 연결을 사용합니다.
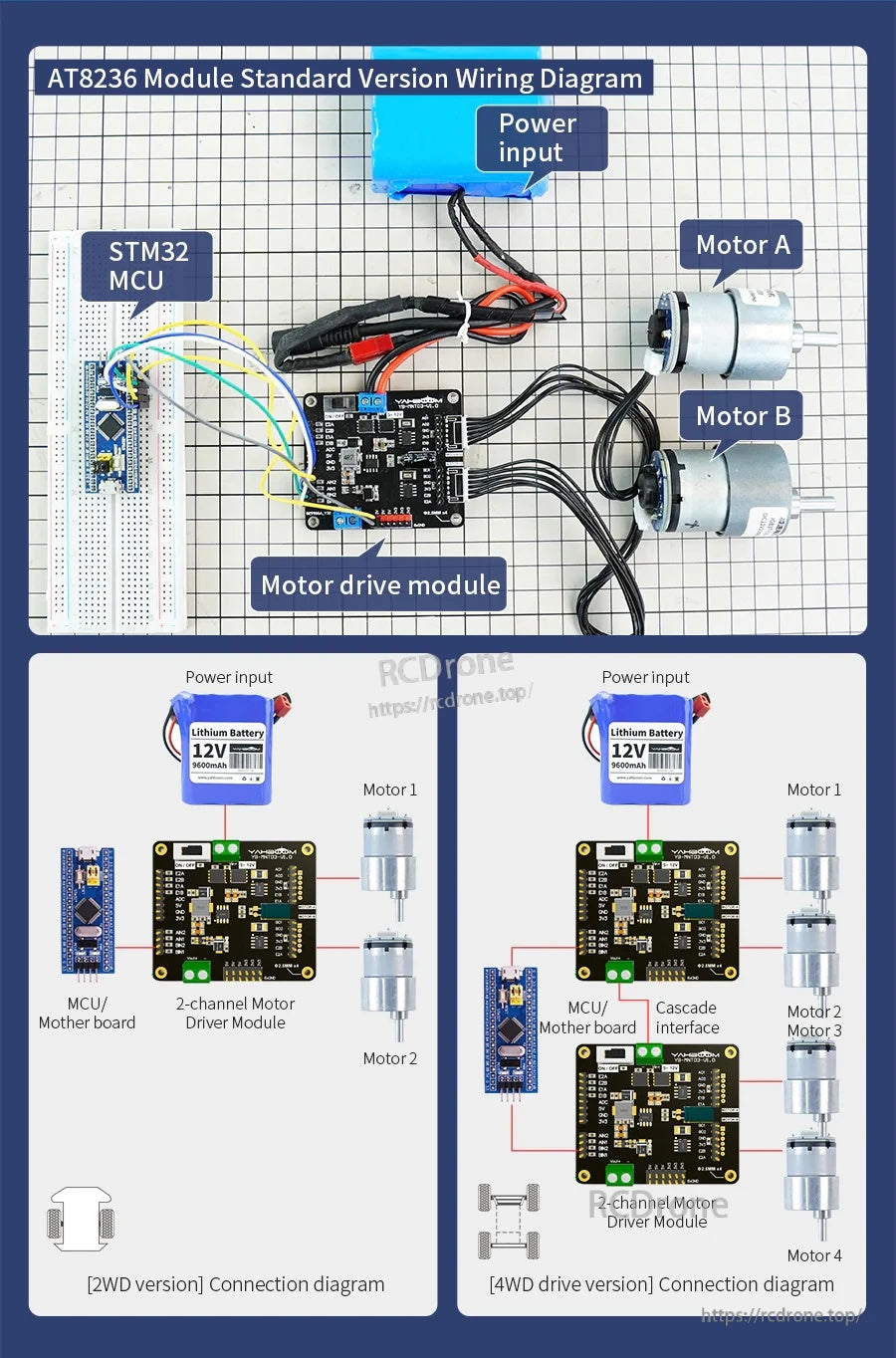
AT8236/TB6612FNG 모터 드라이버는 12V 전원 입력과 모터 A 및 모터 B에 대한 별도의 출력을 지원하며, 선택적으로 2WD 및 4WD 연결 레이아웃을 제공합니다.
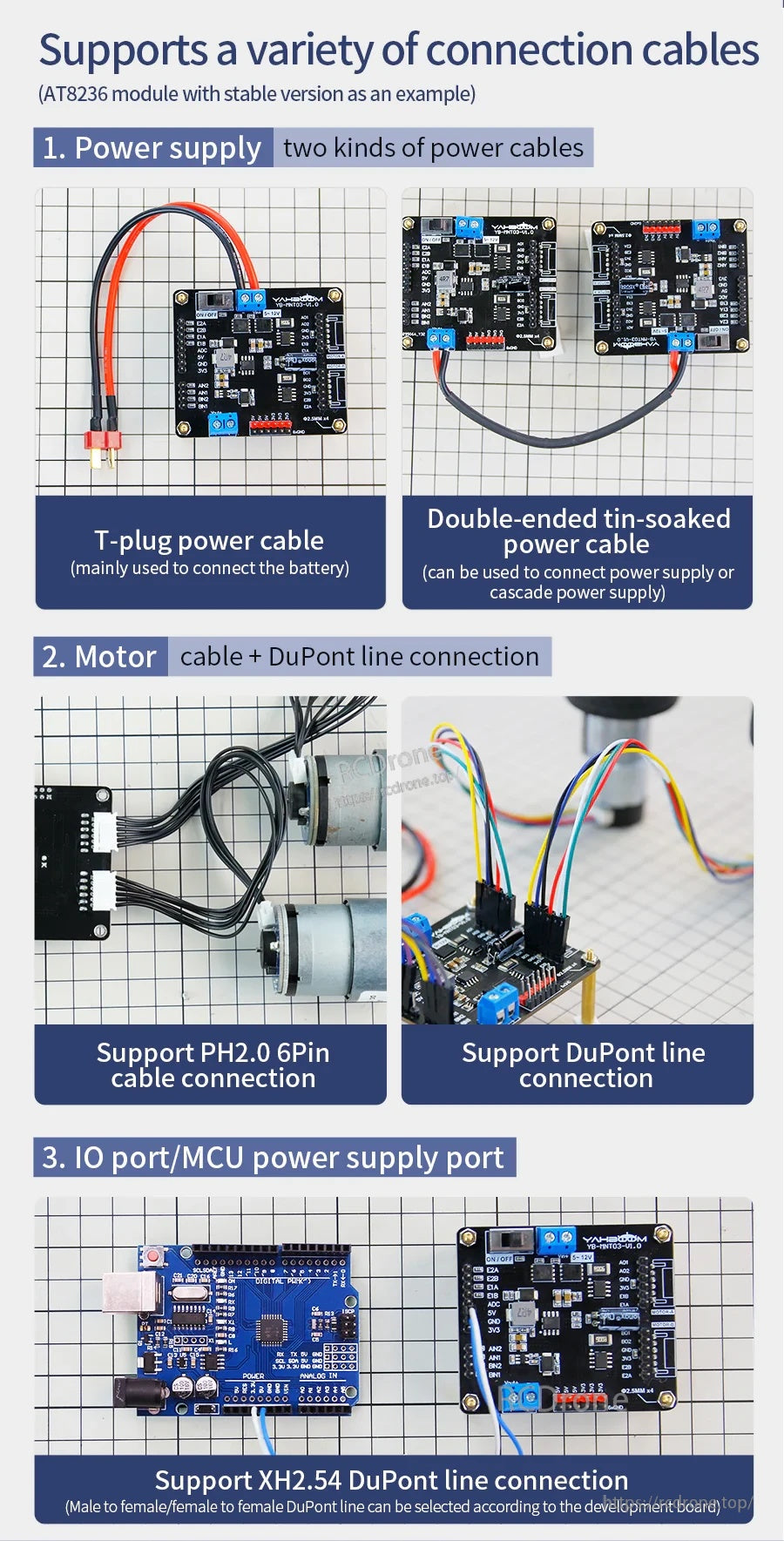
AT8236/TB6612FNG 2채널 모터 드라이브 모듈은 T 플러그 또는 주석 도금 전원 리드와 모터 및 MCU I/O를 위한 PH2.0 및 XH2.54 DuPont 스타일 배선을 지원합니다.
모터 드라이버 모듈의 헤더를 귀하의 배선 하니스에 연결하기 위해 PH2.0 케이블이 필요합니다.

DuPont 점퍼 와이어는 모터 드라이버 모듈을 귀하의 컨트롤러 및 센서에 연결하여 빠른 프로토타입 제작을 돕습니다.
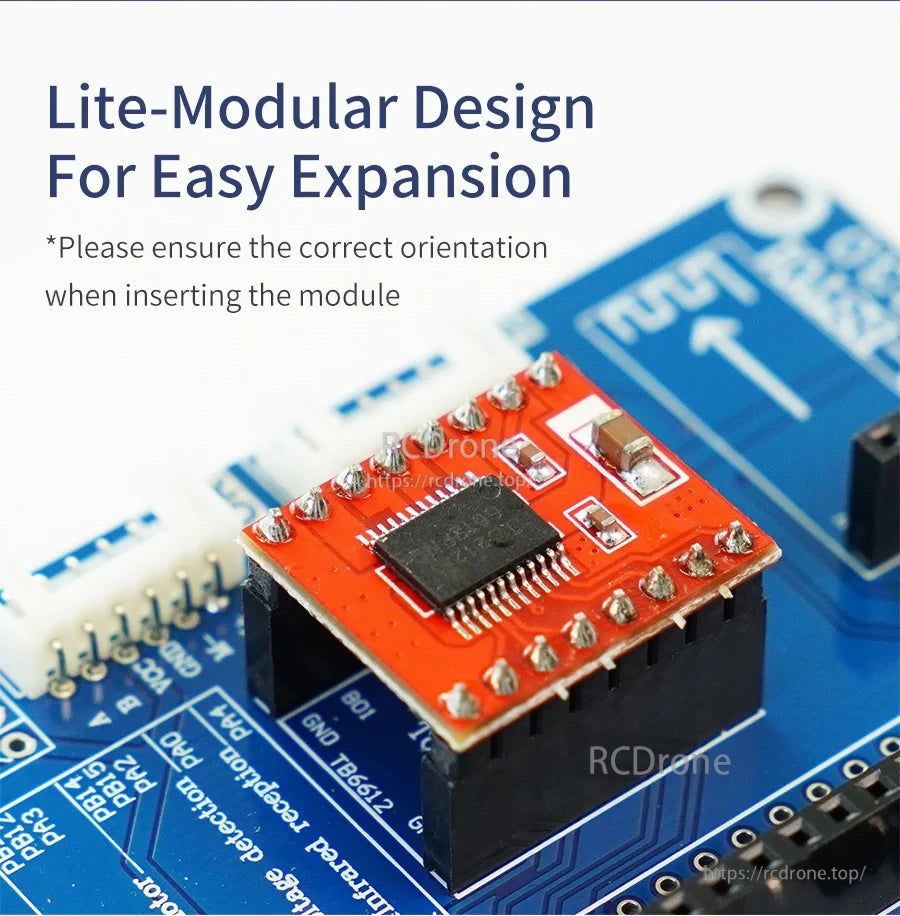
플러그인 모터 드라이버 모듈은 올바른 방향으로 설치할 때 확장 및 교체가 간편한 모듈형 헤더 디자인을 사용합니다.
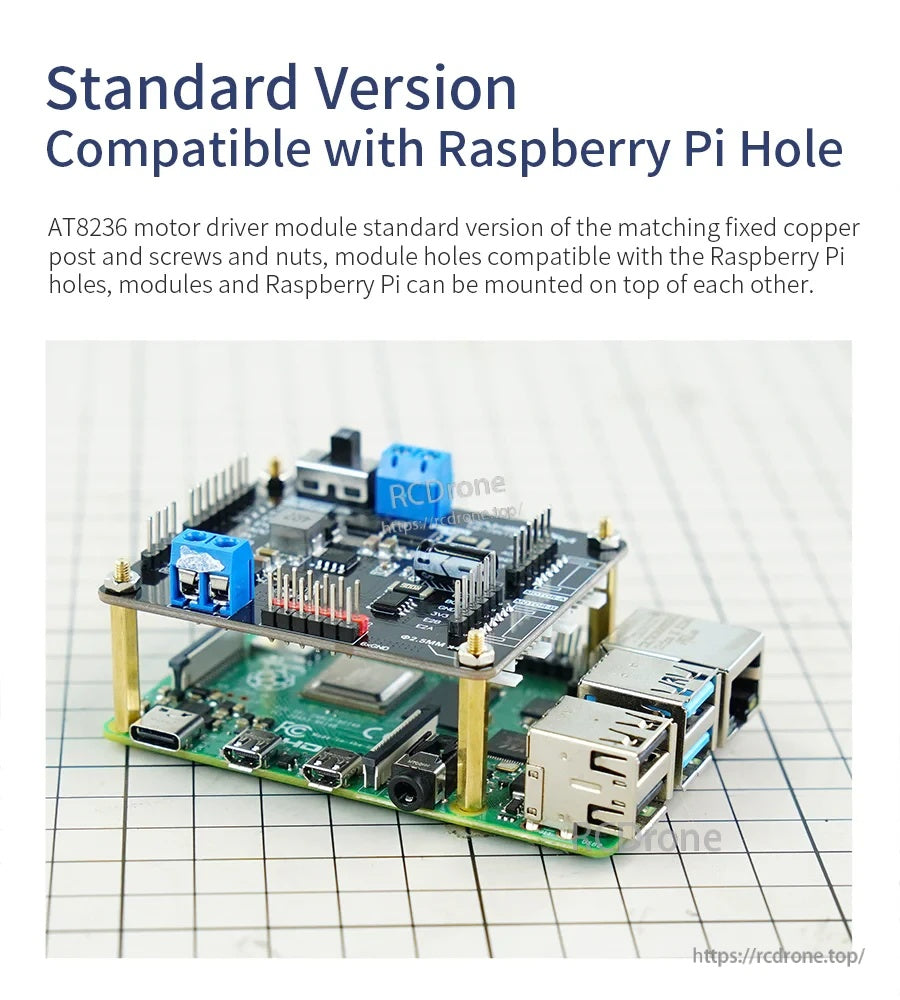
AT8236/TB6612FNG 2채널 모터 드라이버 모듈은 스탠드오프와 헤더 핀을 사용하여 Raspberry Pi 위에 장착되어 깔끔한 스택 설정을 제공합니다.
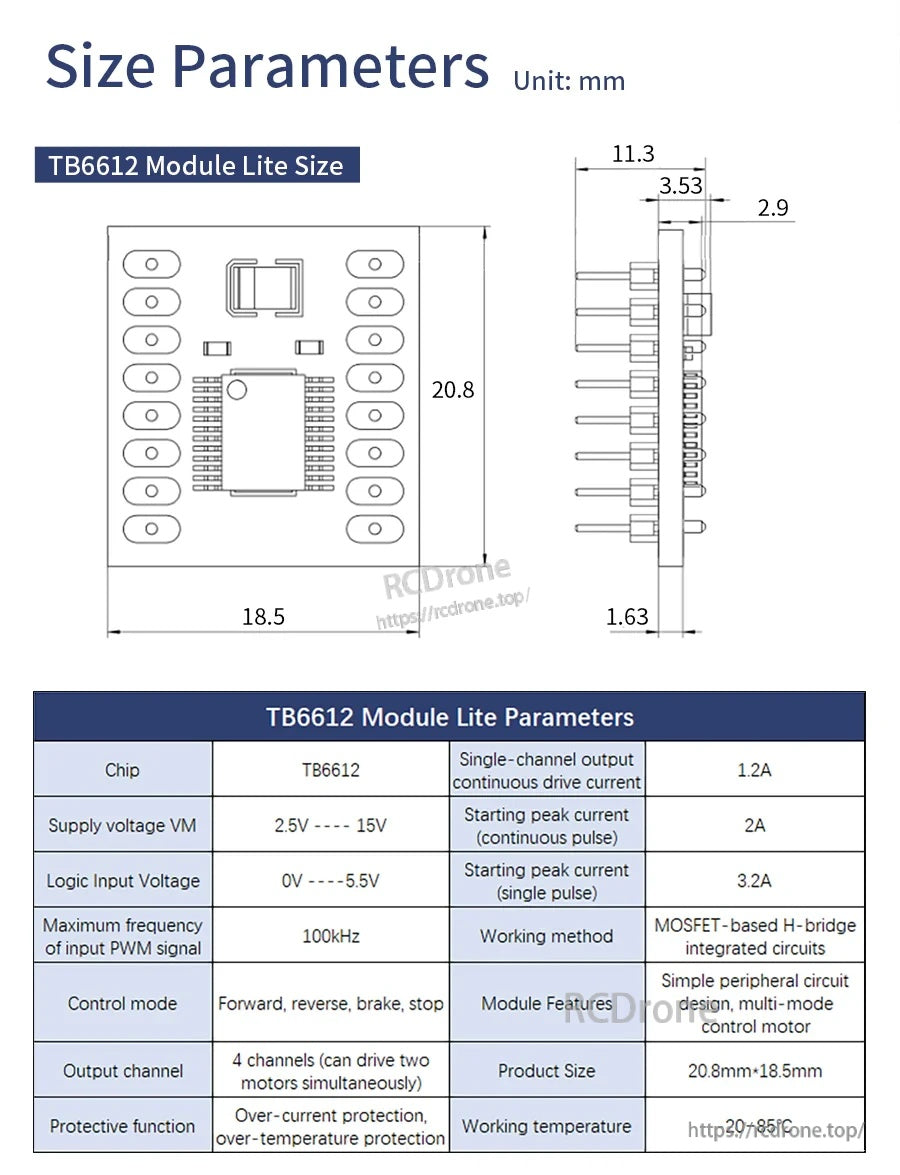
TB6612 모터 드라이버 모듈은 컴팩트한 20.8 × 18.5 mm 보드를 사용하며, 최대 100kHz PWM 제어와 함께 2.5–15V VM 입력을 지원합니다.
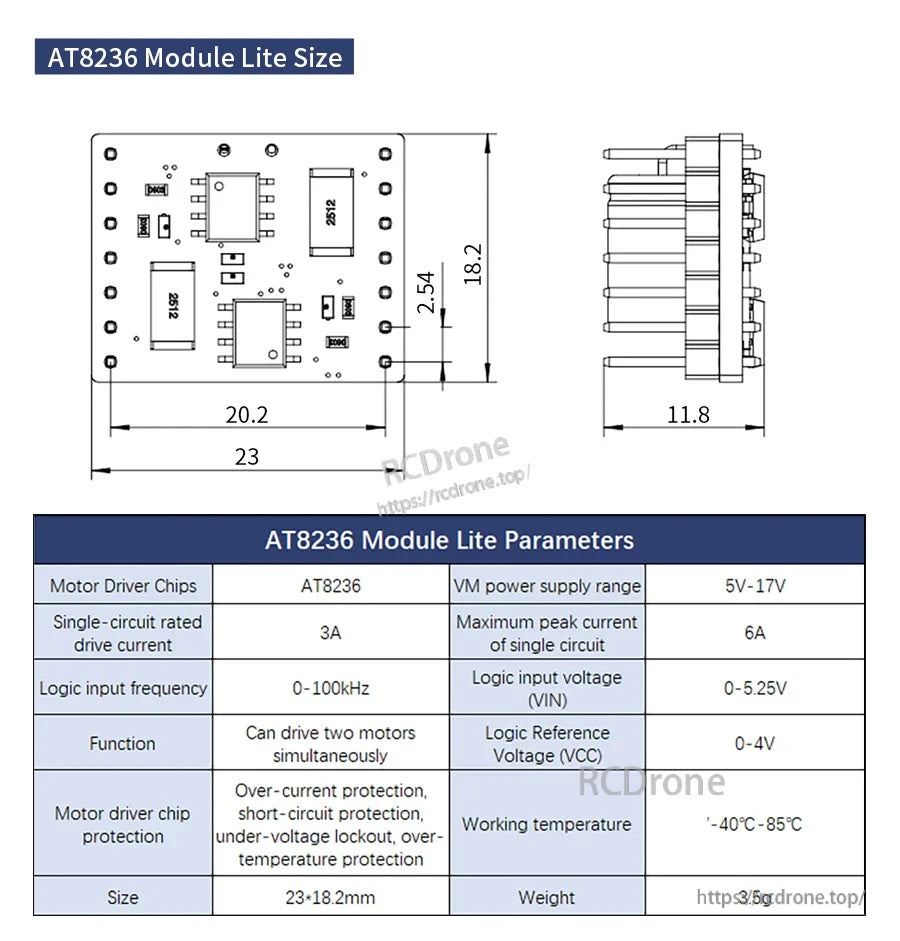
AT8236 모터 드라이브 모듈은 23×18.2 mm 보드 크기와 11.8 mm 두께를 가지며, 5–17V 입력, 3A 정격 및 6A 피크 전류와 같은 주요 사양을 보여줍니다.
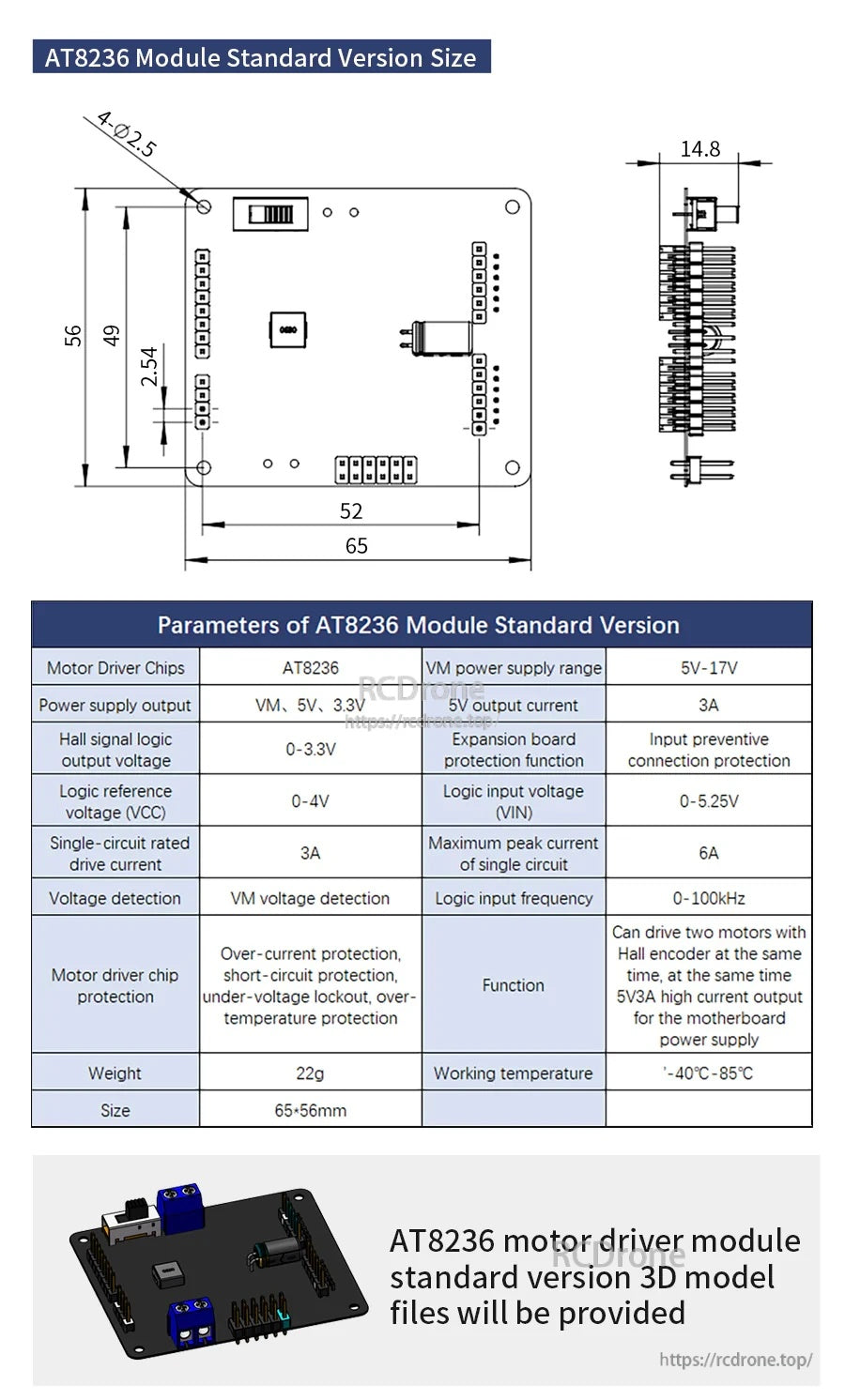
AT8236 모터 드라이버 모듈은 65×56 mm 보드 풋프린트를 사용하며, 홀 인코더 속도 피드백으로 두 개의 모터를 구동하도록 설계되었습니다.
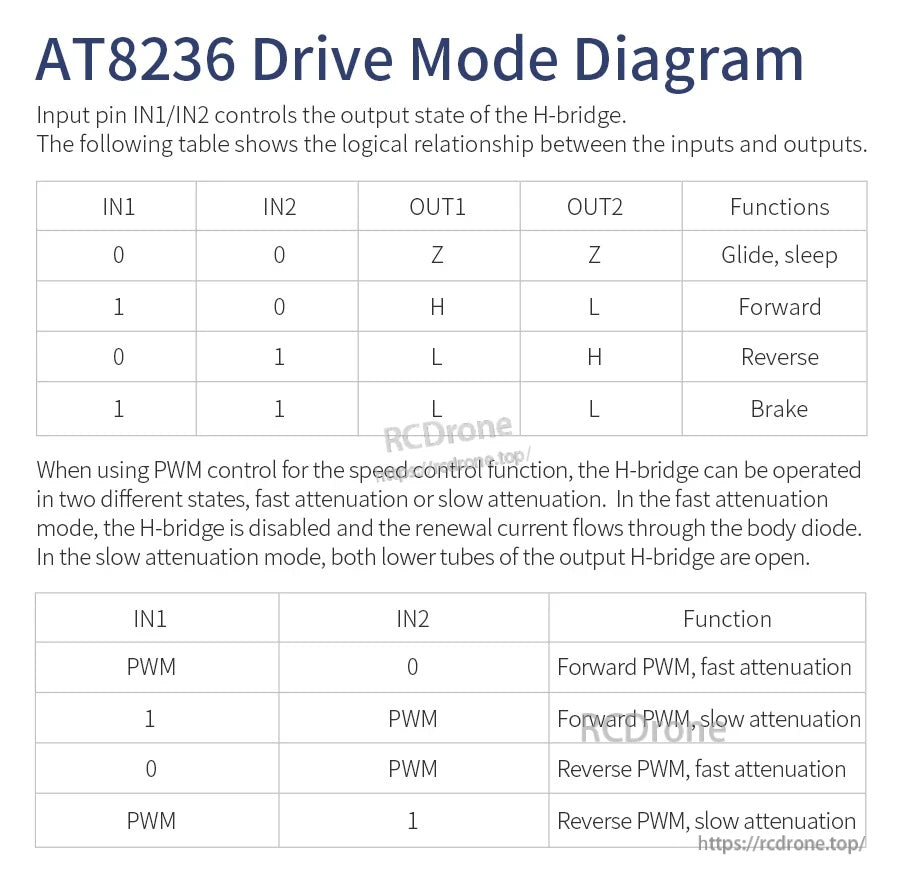
AT8236 IN1/IN2 제어 로직은 전진, 후진, 브레이크 및 슬립 모드를 정의하며, 빠르거나 느린 감쇠를 위한 PWM 옵션을 제공합니다.
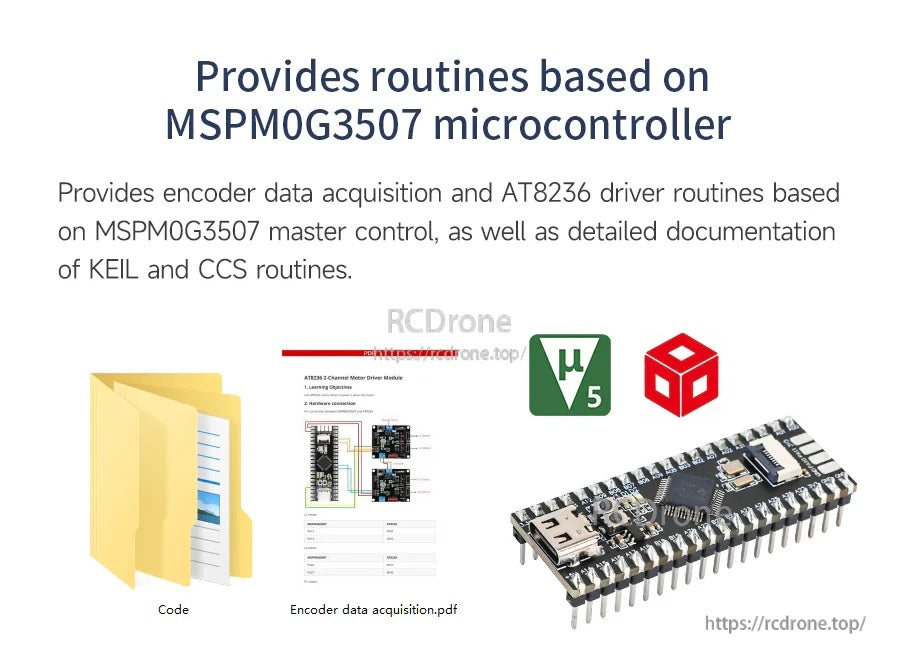
MSPM0G3507 기반의 예제 코드 및 인코더 데이터 수집 문서는 KEIL 또는 CCS에서 더 쉽게 설정할 수 있도록 AT8236 드라이버 루틴을 지원합니다.
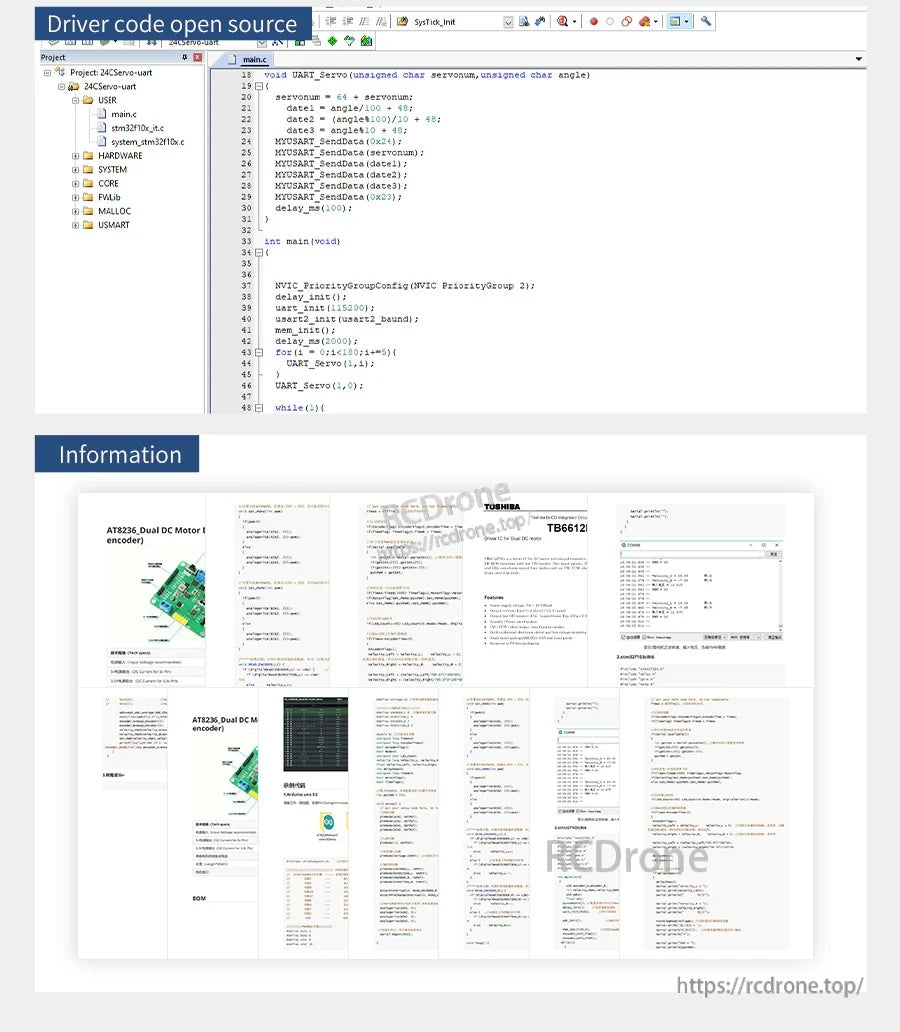
오픈 소스 드라이버 코드 및 참조 문서는 TB6612 기반 2채널 모터 드라이버 모듈의 설정 및 제어에 도움을 줍니다.
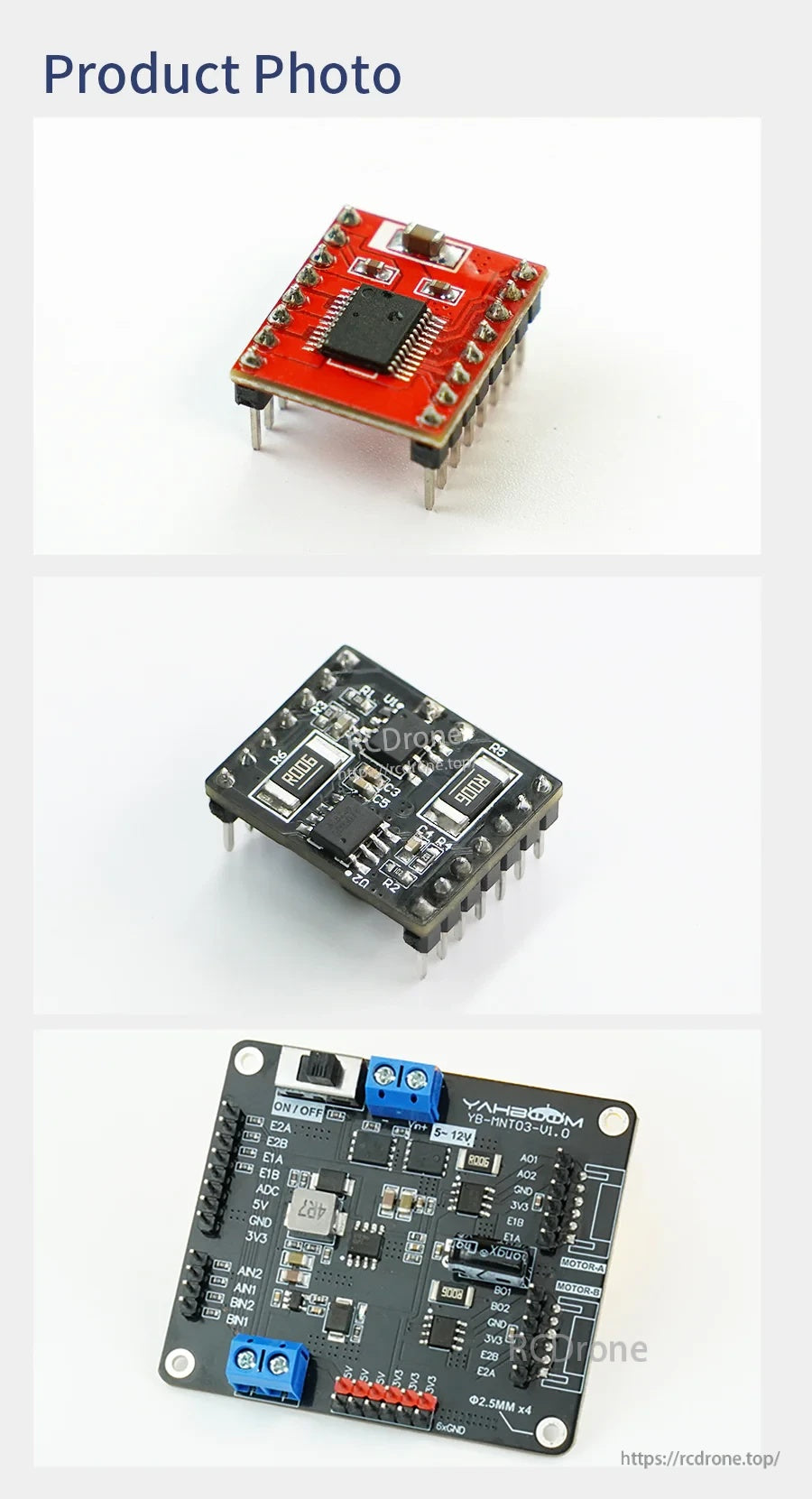
AT8236/TB6612FNG 2채널 모터 드라이버 보드는 더 쉬운 모터 배선을 위해 컴팩트 핀 헤더 모듈과 더 큰 나사 단자 버전으로 제공됩니다.
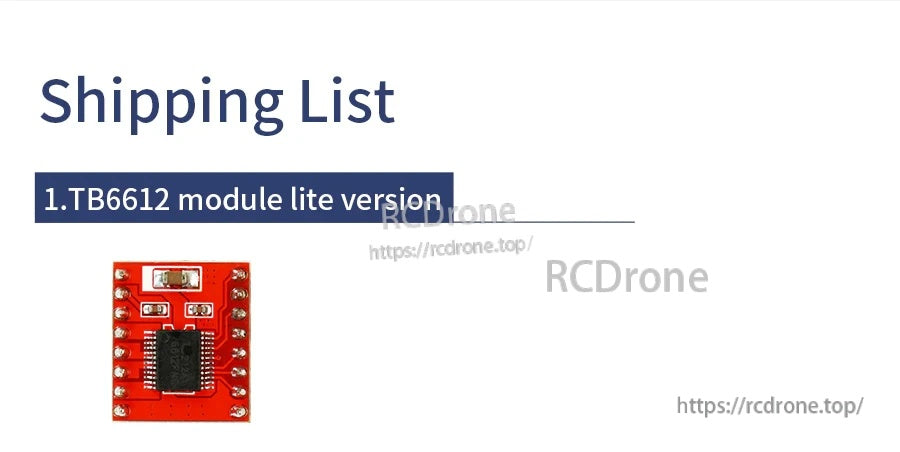
패키지에는 컴팩트한 2채널 DC 모터 제어를 위한 TB6612 모듈(라이트 버전) 모터 드라이버 보드가 포함되어 있습니다.
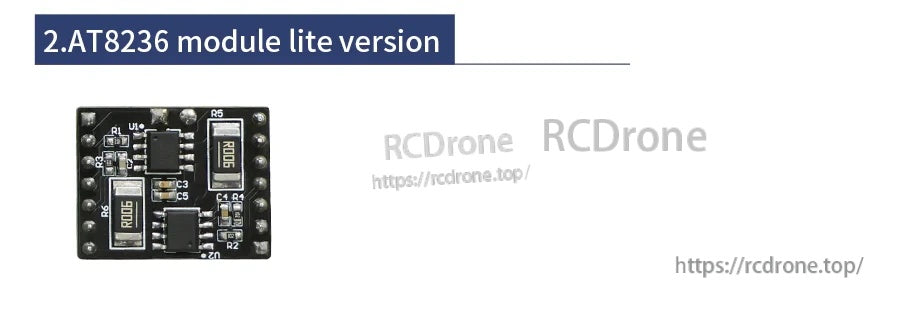
AT8236 라이트 모터 드라이버 모듈은 공간이 제한된 로봇 빌드에 통합할 수 있는 컴팩트한 PCB로 제공됩니다.
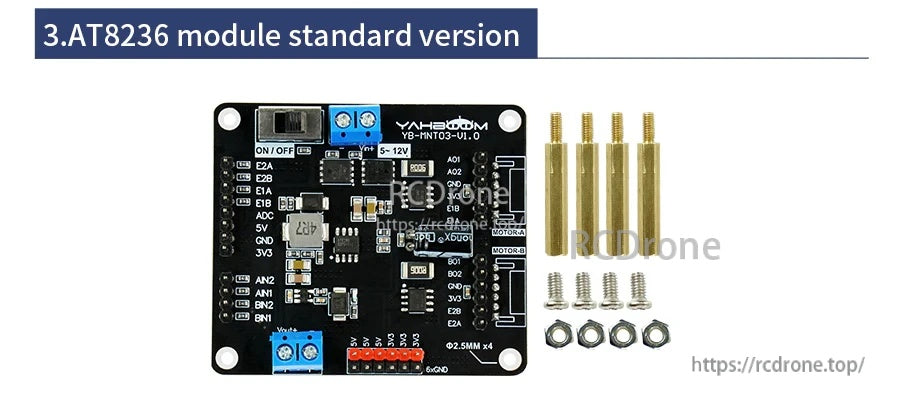
AT8236 듀얼 채널 모터 드라이버 모듈은 5–12V 전원을 위한 나사 단자와 쉬운 설치를 위한 장착 스탠드오프 및 나사 세트를 포함합니다.
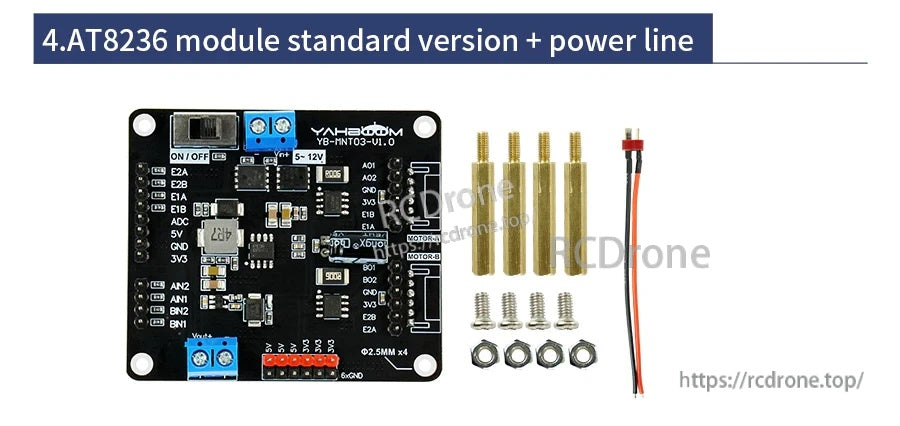
AT8236 모터 드라이버 모듈은 로봇 프로젝트에서 더 쉽게 설치할 수 있도록 장착 스탠드오프, 나사 및 전원 리드를 제공합니다.
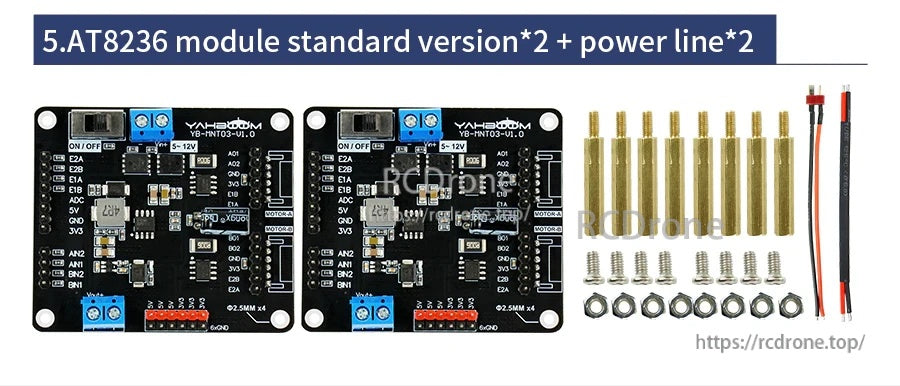
이 키트에는 두 개의 AT8236 모터 드라이버 보드와 함께 장착 스탠드오프, 나사 및 전원 리드가 포함되어 있어 깔끔한 로봇 빌드를 지원합니다.











