









MicroROS-Pi5 ROS2 로봇카 (Humble) 라즈베리 파이 5용, MS200 TOF 라이다 & 2MP 2DOF PTZ 포함
MicroROS-Pi5 ROS2 로봇카 (Humble) 라즈베리 파이 5용, MS200 TOF 라이다 & 2MP 2DOF PTZ 포함
Yahboom
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
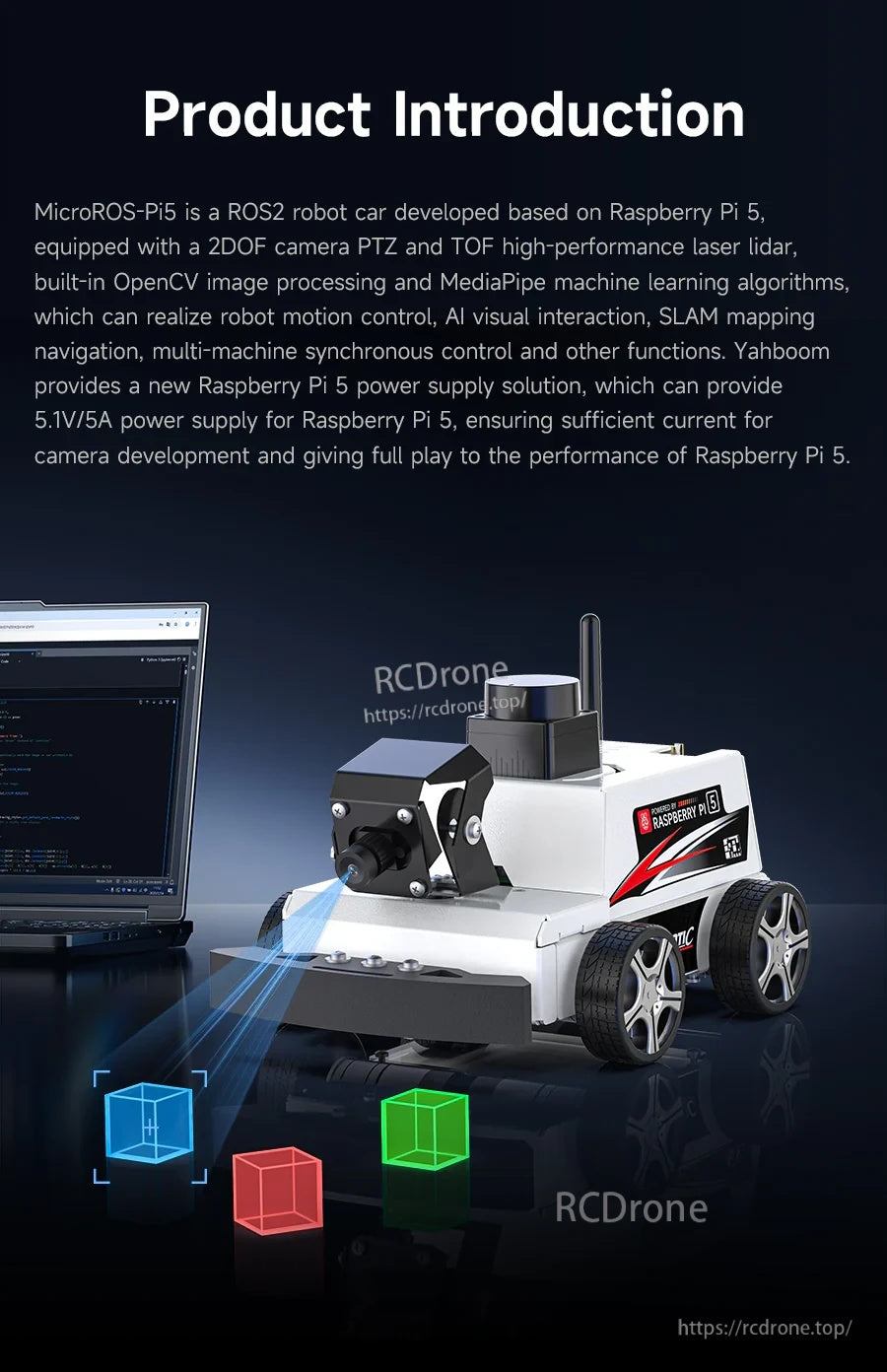
MicroROS-Pi5는 로봇 자동차 로, Raspberry Pi 5, 를 위해 개발되었습니다. Raspberry Pi OS + ROS2 Humble 및 Python 3. 를 사용합니다. MicroROS 로봇 확장/제어 보드와 ESP32 공동 프로세서, MS200 TOF 레이저 LiDAR, 2MP 카메라가 2DOF PTZ 팬/틸트에 장착되어 있으며, 4PCS 310 인코더 모터, 와 양극 산화 알루미늄 합금 프레임/바디, 7.4V 2000mAh 충전식 배터리가 포함되어 있습니다. OpenCV 이미지 처리 및 MediaPipe 머신러닝 알고리즘을 사용하여 로봇 모션 제어, AI 시각적 상호작용, SLAM 매핑/내비게이션, RViz 시뮬레이션, 다중 기기 동기 제어를 지원합니다.
주요 특징
- Raspberry Pi 5 전원 솔루션: Raspberry Pi 5에 5.1V/5A 전원을 공급하며 (PD 지원), 충분한 USB 인터페이스 전류와 안정적인 작동을 보장하도록 설계되었습니다.
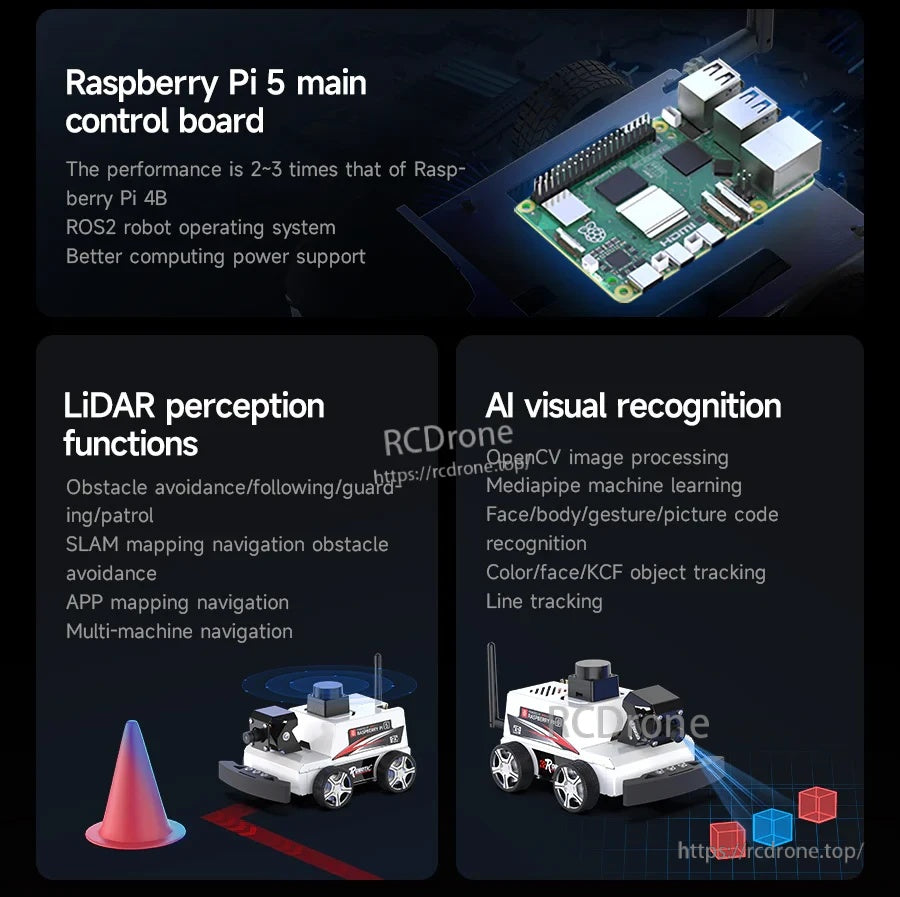
- 듀얼 컨트롤러 아키텍처: Raspberry Pi 5는 시각 처리 및 매핑을 위한 ROS 컨트롤러(상위 레벨)로 사용되며, ESP32는 모터 구동, 서보 각도 제어, IMU 획득 및 LiDAR/카메라 구동을 위한 하위 레벨 공동 프로세서로 사용됩니다.
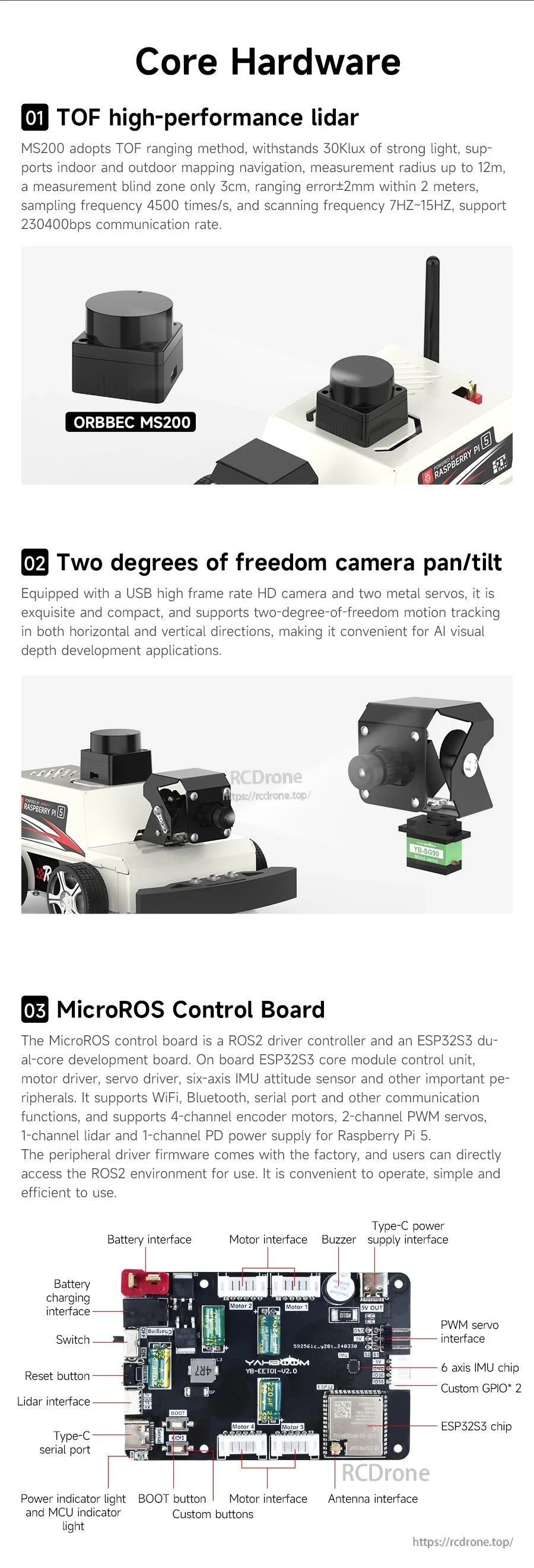
- MS200 TOF LiDAR 기능: SLAM 매핑(gmapping 및 cartographer), 경로 계획, 장애물 회피가 가능한 단일 지점 및 다중 지점 내비게이션, iOS/Android 앱 매핑 내비게이션, 다중 기기 내비게이션 및 LiDAR 기반 행동(회피, 추적, 경비, 순찰).
- AI 시각 인식 & 상호작용: OpenCV + MediaPipe; 얼굴/몸/제스처/사진 코드 인식; QR 코드 인식; AR 비전(체스보드 종이를 사용한 12가지 AR 시각 효과); 색상/얼굴/KCF 객체 추적; 라인 추적; 제스처 제어 움직임 및 자동 조종 색상 추적.
- 2DOF 카메라 PTZ: 금속 서보가 장착된 USB 고프레임 속도 HD 카메라; 수평 180° 및 수직 180° 전기 회전을 지원하여 모션 추적 및 AI 비주얼 개발에 적합합니다.
- 섀시/바디 디자인: 알루미늄 합금 바디, 밀폐형 캐빈 디자인, 기하학적 중공 열 방출 구멍, 배선을 위한 예약 구멍, EVA 충돌 방지 면, PWM 조절 속도 능동 냉각 (Cool cooler Pi50).
- 다양한 제어 방법: 모바일 앱 제어 (전진/후진/좌회전/우회전 실시간 카메라 뷰 포함), 다중 로봇 동기 제어를 위한 핸들 제어, 다중 로봇 동기 제어를 위한 키보드 제어.
- RViz 시뮬레이션 지원 개발 피드백, 디버깅, 테스트 및 가상 환경에서의 알고리즘 검증을 위해.
사양
| 제품 | MicroROS-Pi5 ROS2 로봇 자동차 for Raspberry Pi 5 |
| 운영 체제 / ROS | Raspberry Pi OS + ROS2 Humble |
| 프로그래밍 언어 | Python 3 |
| 메인 컨트롤러 | Raspberry Pi 5 (옵션 구성) |
| 보조 프로세서 | ESP32 (MicroROS 로봇 확장/제어 보드; 제품 자료에 ESP32S3 듀얼 코어 개발 보드 참조) |
| LiDAR | MS200 TOF 레이저 LiDAR (ORBBEC MS200 참조) |
| LiDAR 측정 반경 | 최대 12m |
| LiDAR 블라인드 존 | 3cm |
| LiDAR 거리 측정 오차 | 2미터 이내 ±2mm |
| LiDAR 샘플링 주파수 | 4500회/s |
| LiDAR 스캐닝 주파수 | 7HZ~15HZ |
| LiDAR 통신 속도 | 230400bps |
| 카메라 | 2MP; USB 고프레임 HD 카메라 |
| 카메라 팬/틸트 | 2DOF PTZ; 수평 180° 전기 회전; 수직 180° 전기 회전 |
| 모터 | 4PCS 310 감속 모터 (금속 인코더 감속 모터 참조) |
| 모터 감속비 | 1:20 |
| IMU | 6축 IMU 센서 (3축 가속도계 + 3축 자이로스코프) |
| 배터리 팩 | 7.4V 2000mAh 리튬 배터리 팩 |
| Raspberry Pi 5용 전원 | 5.1V/5A (PD 지원) |
| 프레임/바디 | 양극 산화 알루미늄 합금; 밀폐된 캐빈; EVA 충돌 방지 면 |
| 냉각 | 쿨 액티브 히트 싱크; PWM 조절 속도 팬; 알루미늄 합금 히트 싱크 (Cool cooler Pi50 참조) |
MicroROS 제어 보드 인터페이스 (제품 자료에서)
| 전원 / 충전 | 배터리 인터페이스; 배터리 충전 인터페이스; Type-C 전원 공급 인터페이스; 5V OUT; 스위치 |
| 통신 | WiFi; 블루투스; Type-C 시리얼 포트; 안테나 인터페이스 |
| 주변 장치 | LiDAR 인터페이스; PWM 서보 인터페이스; 4채널 인코더 모터 지원; 2채널 PWM 서보 지원; 부저 |
| 제어 / 표시기 | 리셋 버튼; BOOT 버튼; 사용자 정의 버튼; 전원 표시등 및 MCU 표시등 |
| 센서 / 확장 | 6축 IMU 칩; 커스텀 GPIO * 2 |
Raspberry Pi 5 보드 참조 (제품 자료에서)
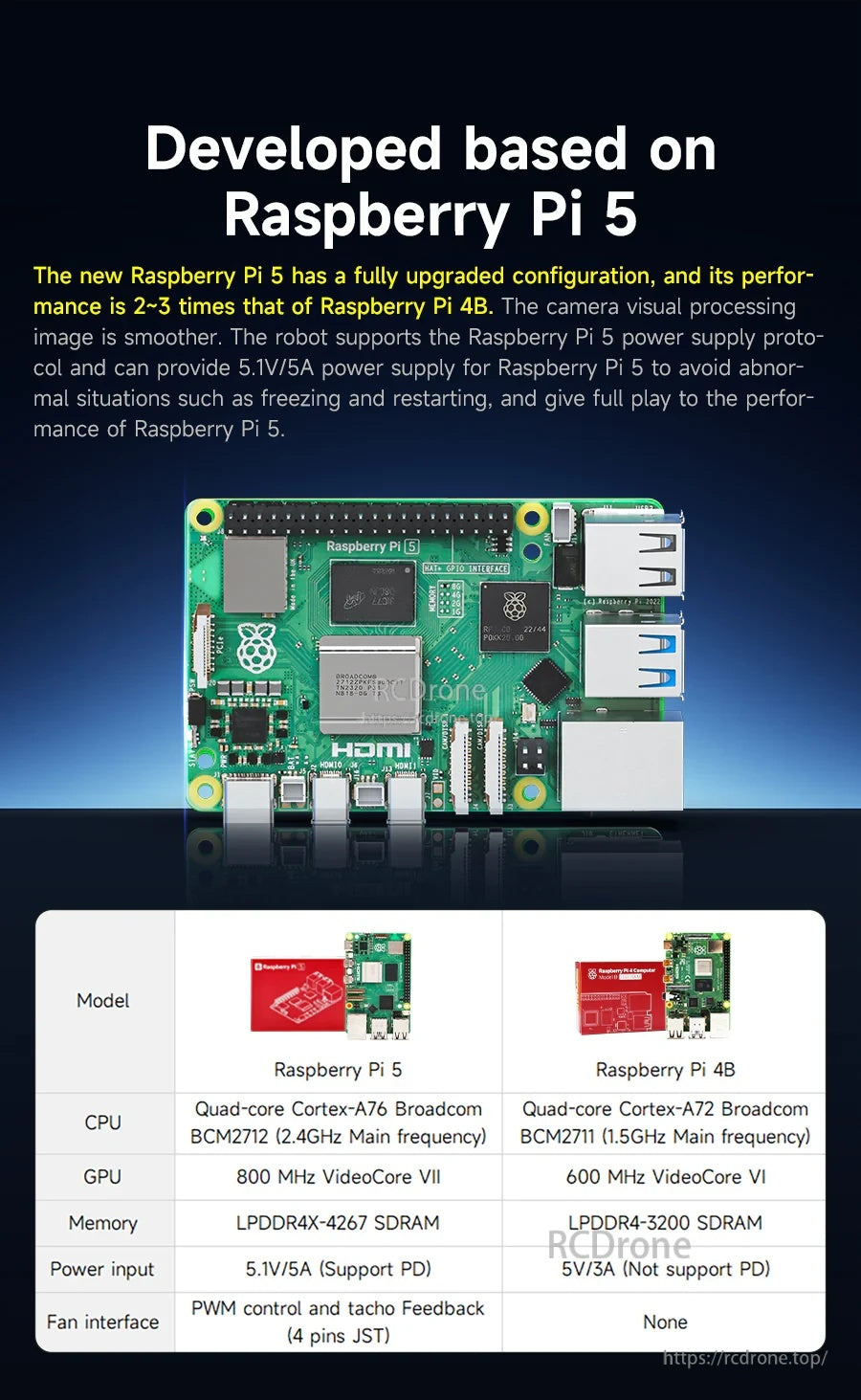
| 항목 | Raspberry Pi 5 | Raspberry Pi 4B |
| CPU | 쿼드코어 Cortex-A76 Broadcom BCM2712 (2.4GHz 메인 주파수) | 쿼드 코어 Cortex-A72 Broadcom BCM2711 (1.5GHz 메인 주파수) |
| GPU | 800 MHz VideoCore VII | 600 MHz VideoCore VI |
| 메모리 | LPDDR4X-4267 SDRAM | LPDDR4-3200 SDRAM |
| 전원 입력 | 5.1V/5A (PD 지원) | 5V/3A (PD 미지원) |
| 팬 인터페이스 | PWM 제어 및 타코 피드백 (4핀 JST) | 없음 |
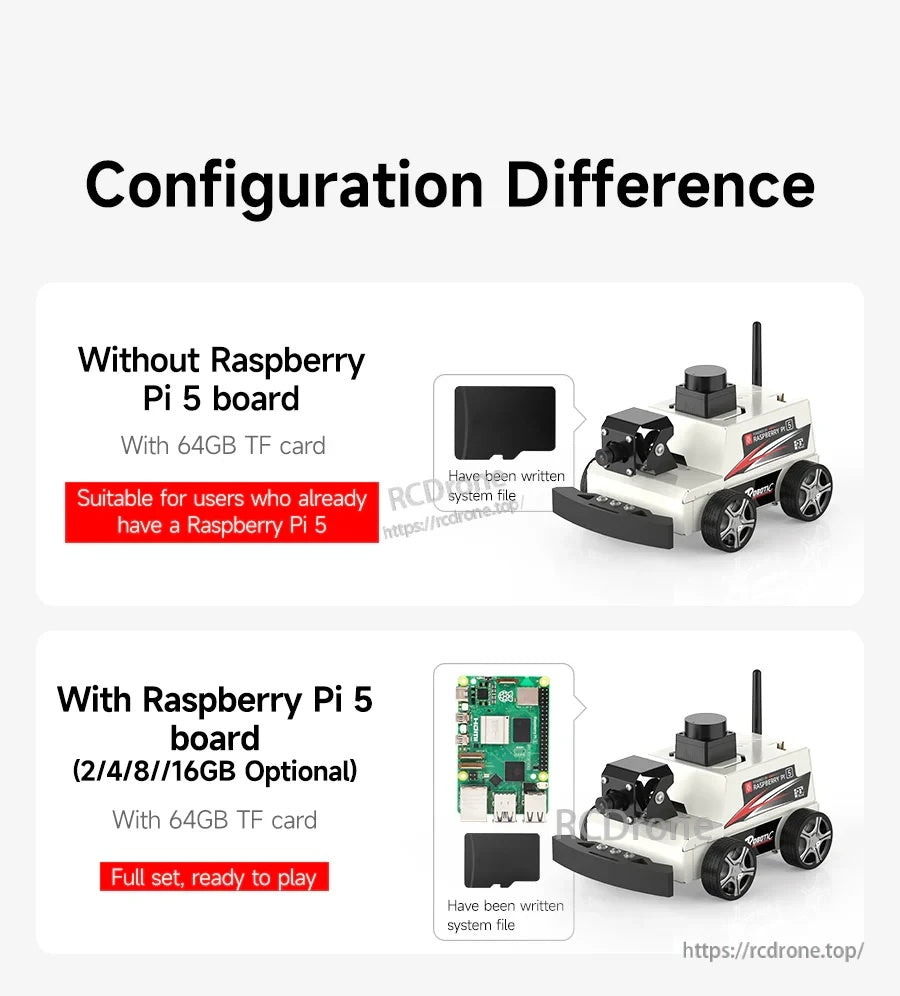
구성 옵션
- Raspberry Pi 5 보드 없이: 64GB TF 카드 (시스템 파일 작성됨) 포함. 이미 Raspberry Pi 5를 보유한 사용자에게 적합합니다.
- Raspberry Pi 5 보드 포함: Raspberry Pi 5 메모리 옵션은 2/4/8/16GB 선택 가능, 64GB TF 카드 (시스템 파일 작성됨) 포함.
응용 프로그램
- ROS2 학습 및 로봇 교육
- SLAM 매핑, 내비게이션 및 경로 계획 개발
- OpenCV 및 MediaPipe를 활용한 컴퓨터 비전 프로젝트
- 다중 로봇 동기 제어 및 RViz 기반 시뮬레이션 워크플로우
매뉴얼
구성 선택, 사전 판매 질문 및 기술 지원을 위해 https://rcdrone.top/에 문의하거나 이메일 [email protected].
세부 정보
비전, 매핑 및 내비게이션을 위해 설계된 컴팩트 로봇 자동차로 Raspberry Pi 5에서 ROS2 프로젝트를 구축하십시오.
실제 로봇 동작을 위한 ROS2 Humble, Python 및 AI 비전 워크플로우를 결합한 완전한 개발 플랫폼.
핵심 기능에는 온보드 컴퓨팅, 장애물 인식 내비게이션을 위한 LiDAR 인식, AI 시각 인식이 포함됩니다.

구조화된 수업, 실용적인 데모, 설정 및 문제 해결을 위한 기술 지원을 통해 더 빠르게 생산성을 높이세요.
카메라 및 센서 작업 중 USB 전류를 안정적으로 유지하기 위해 Raspberry Pi 5 전력 요구 사항에 맞춰 설계되었습니다.
기존 Pi 5를 재사용하거나 즉시 실행 가능한 번들을 선택하여 실험실에 맞는 키트를 선택하세요.
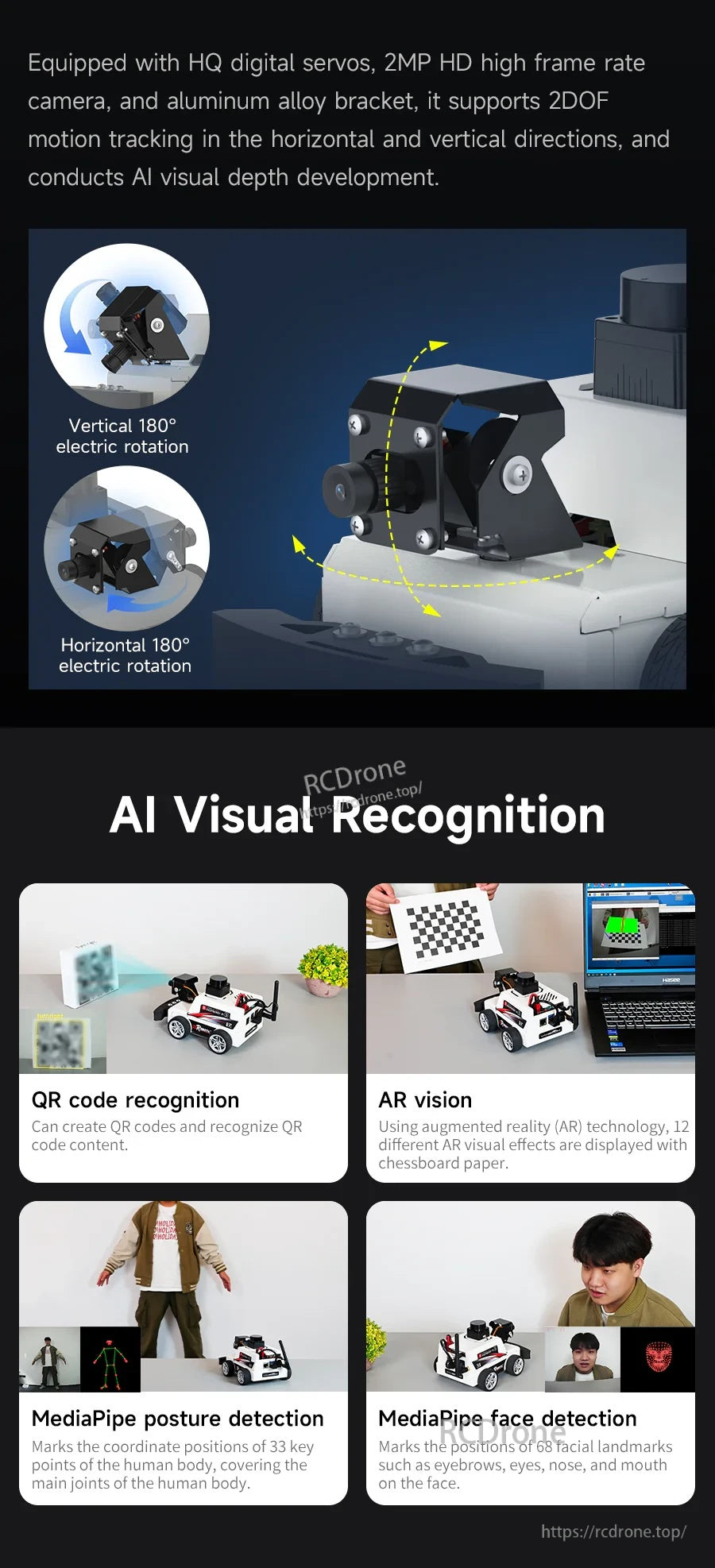
2DOF 팬/틸트 카메라 마운트는 OpenCV 및 MediaPipe 작업을 위한 추적 실험과 유연한 시점을 가능하게 합니다.
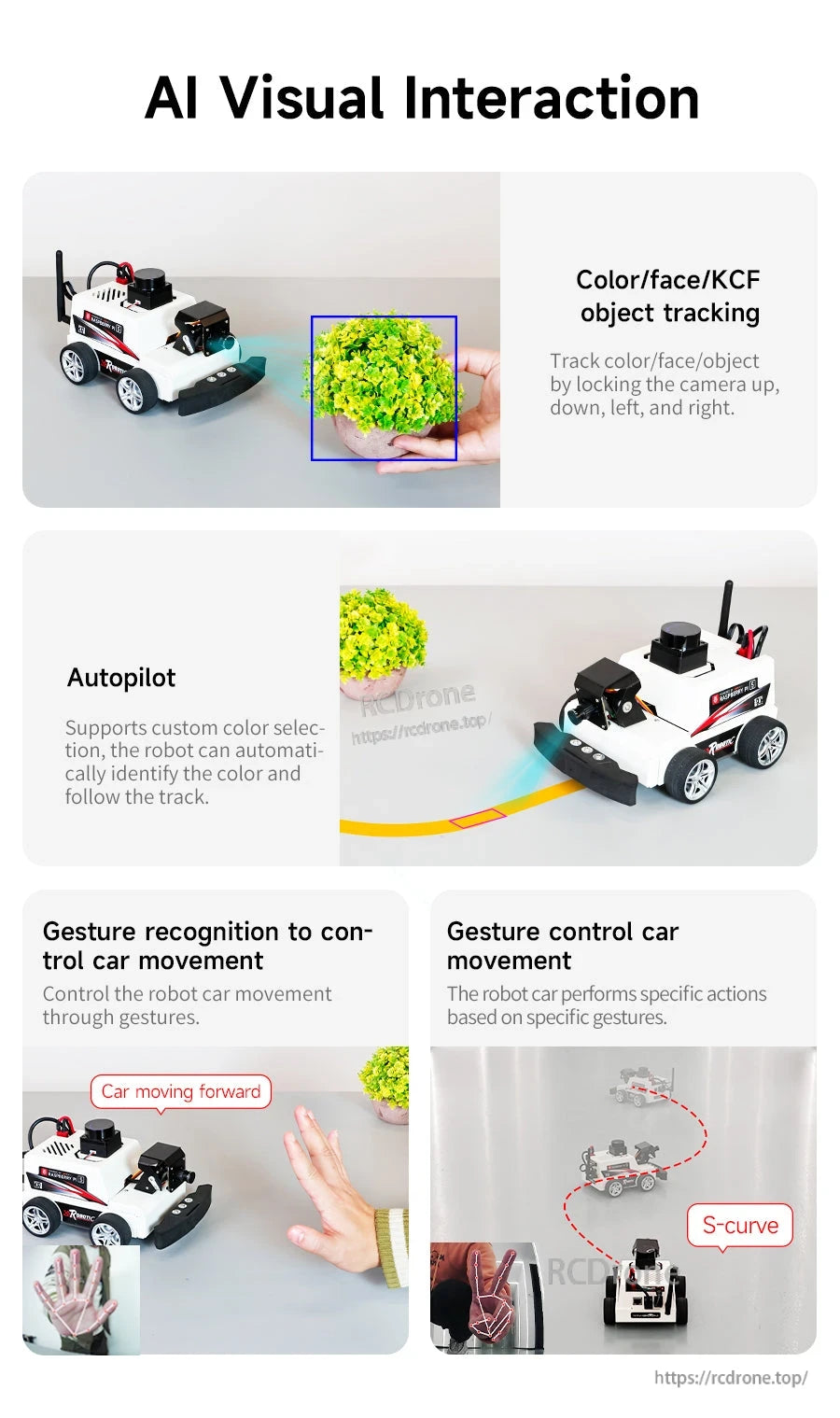
인터랙티브 데모는 객체 추적, 색상 추적 자동 조종 장치, 제스처 기반 모션 제어를 다룹니다.
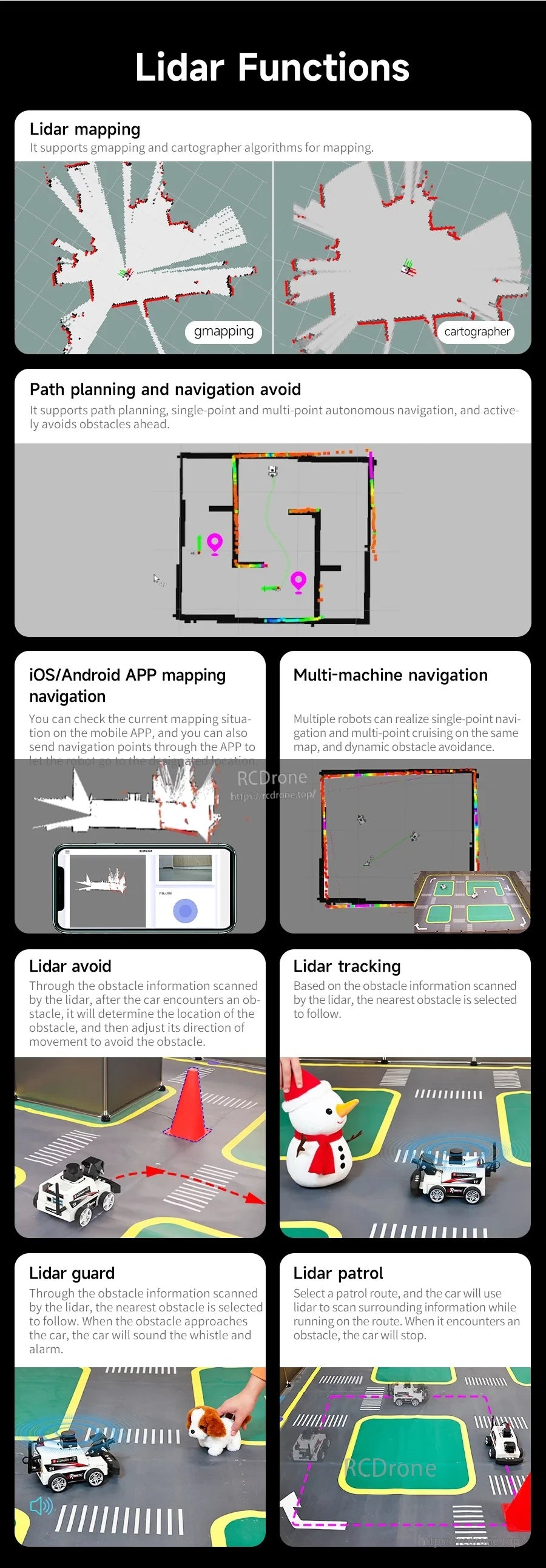
TOF LiDAR를 사용하여 SLAM 매핑, 경로 계획, 장애물 회피 및 다중 로봇 협력 내비게이션을 수행하세요.
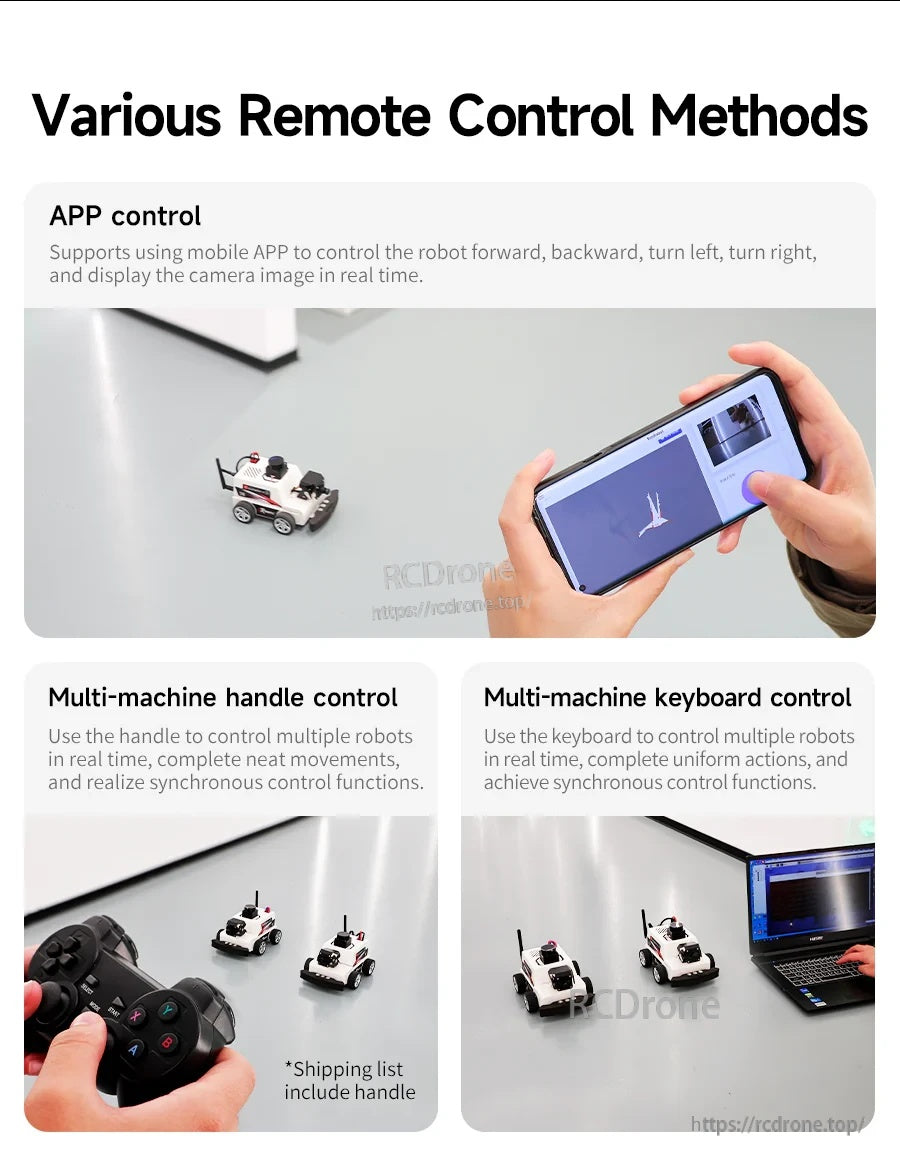
제어 옵션은 실시간 비디오를 통한 전화 기반 운전부터 핸들이나 키보드를 통한 동기화된 다중 로봇 제어까지 다양합니다.
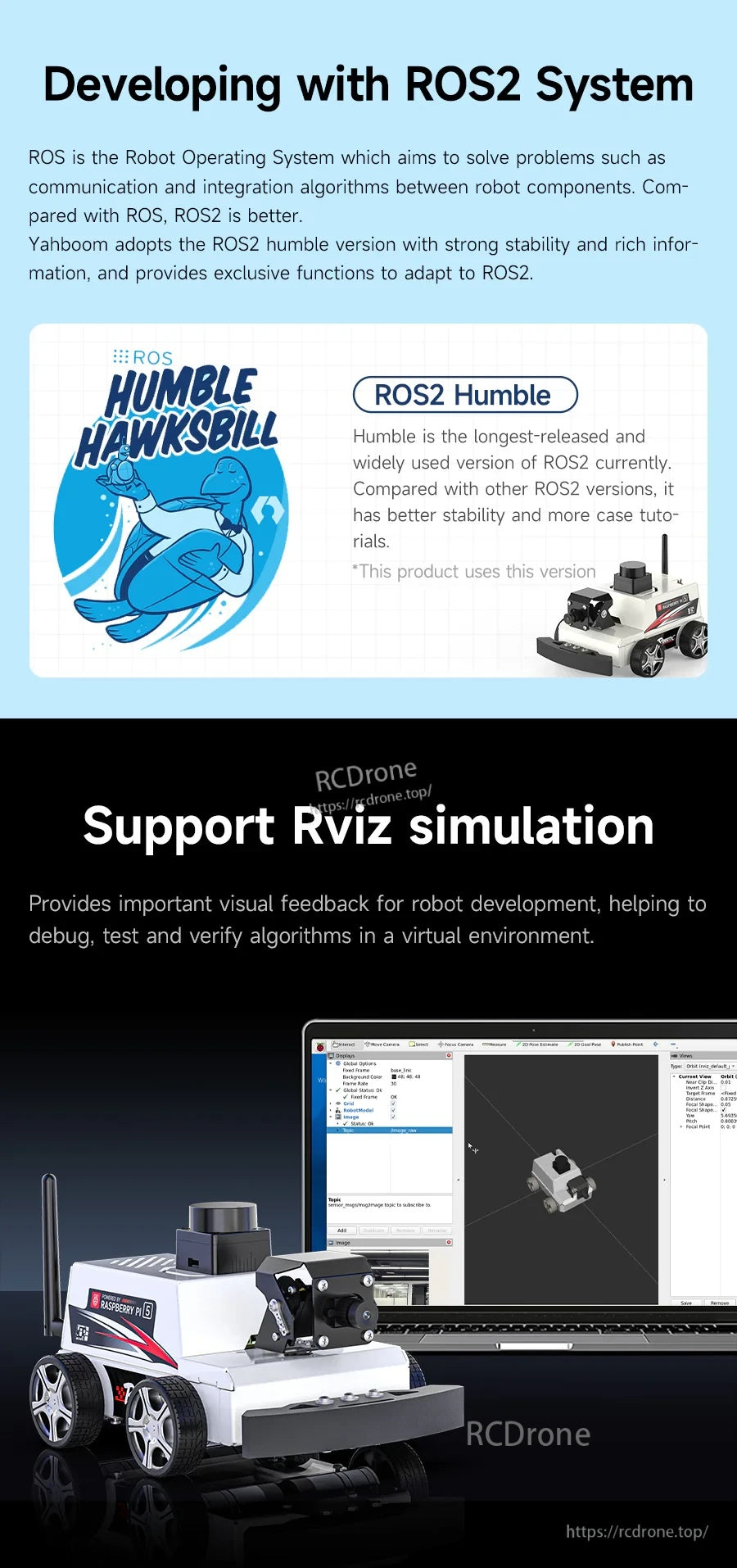
ROS2 Humble에서 개발하고 시뮬레이션에서 실제 실행으로 이동하기 전에 RViz에서 동작을 검증합니다.
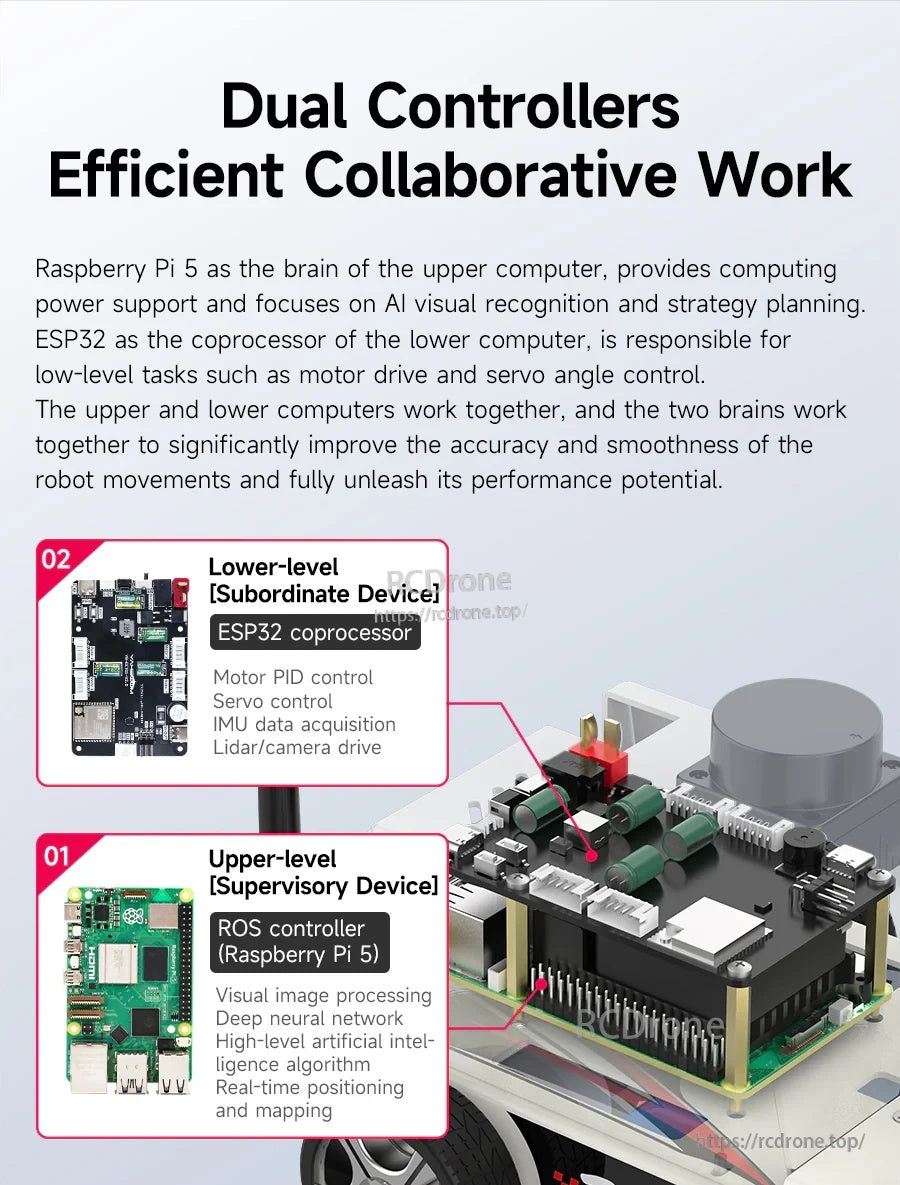
이중 컨트롤러 설계는 실시간 모터 및 센서 작업을 ESP32에 분산시키고 Raspberry Pi 5가 ROS 및 비전을 처리합니다.
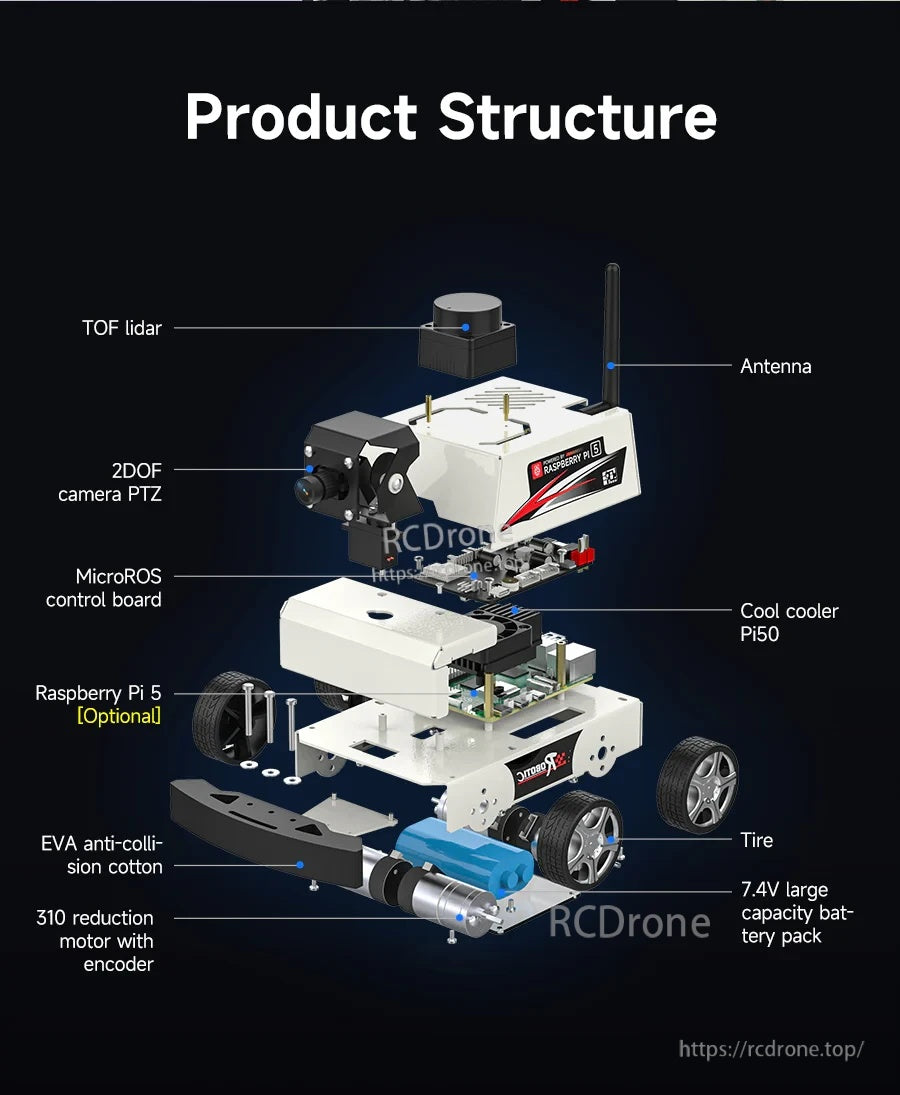
분해된 레이아웃은 유지보수, 업그레이드 및 배선을 위한 주요 모듈을 쉽게 식별할 수 있게 합니다.

기계적 세부 사항은 내구성, 공기 흐름, 배선 접근성 및 지속적인 확장을 위한 센서 준비 통합에 중점을 둡니다.
핵심 구성 요소는 빠른 접근을 위해 조직되어 있습니다—LiDAR, 팬/틸트 카메라, 그리고 MicroROS 확장/제어 보드.
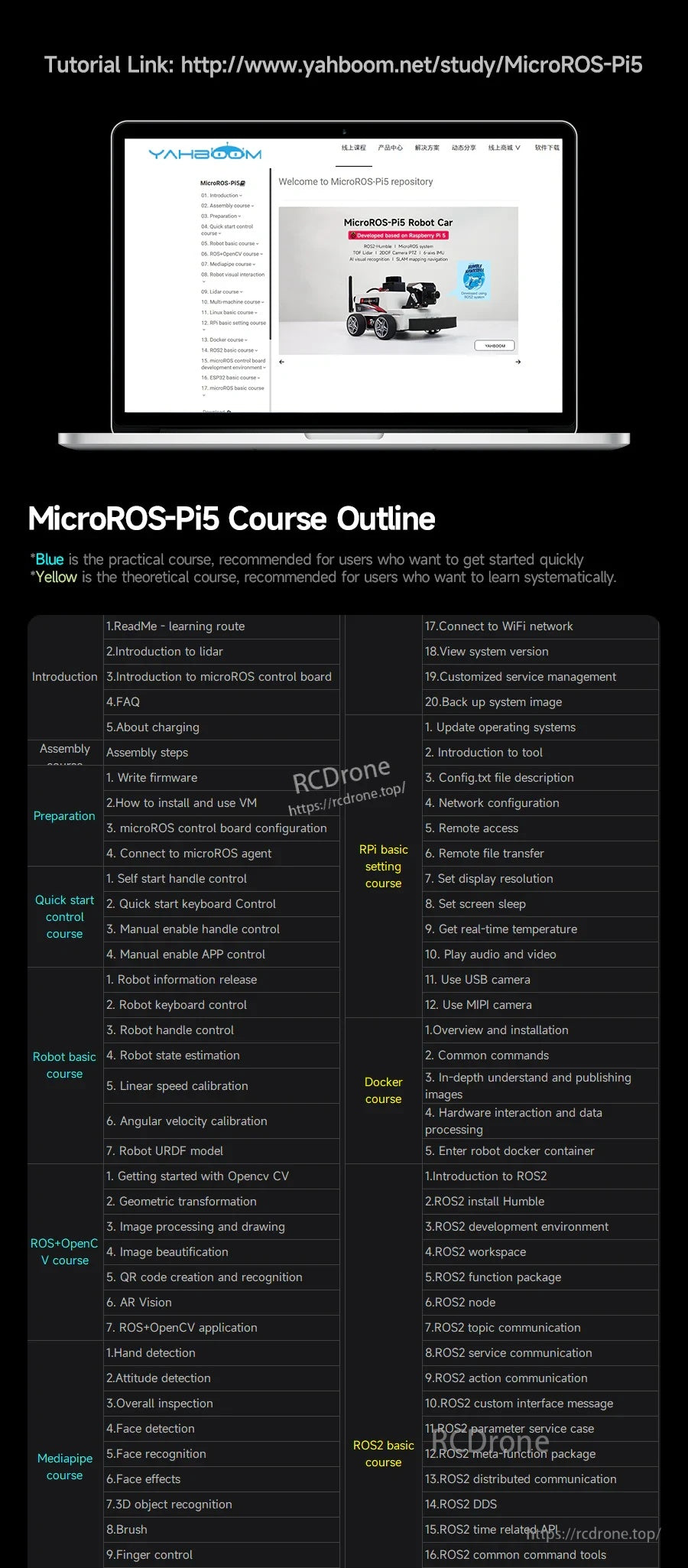
단계별 커리큘럼은 설정, 로봇 제어, 인식, 매핑 및 일반적인 ROS2 워크플로우를 다룹니다.
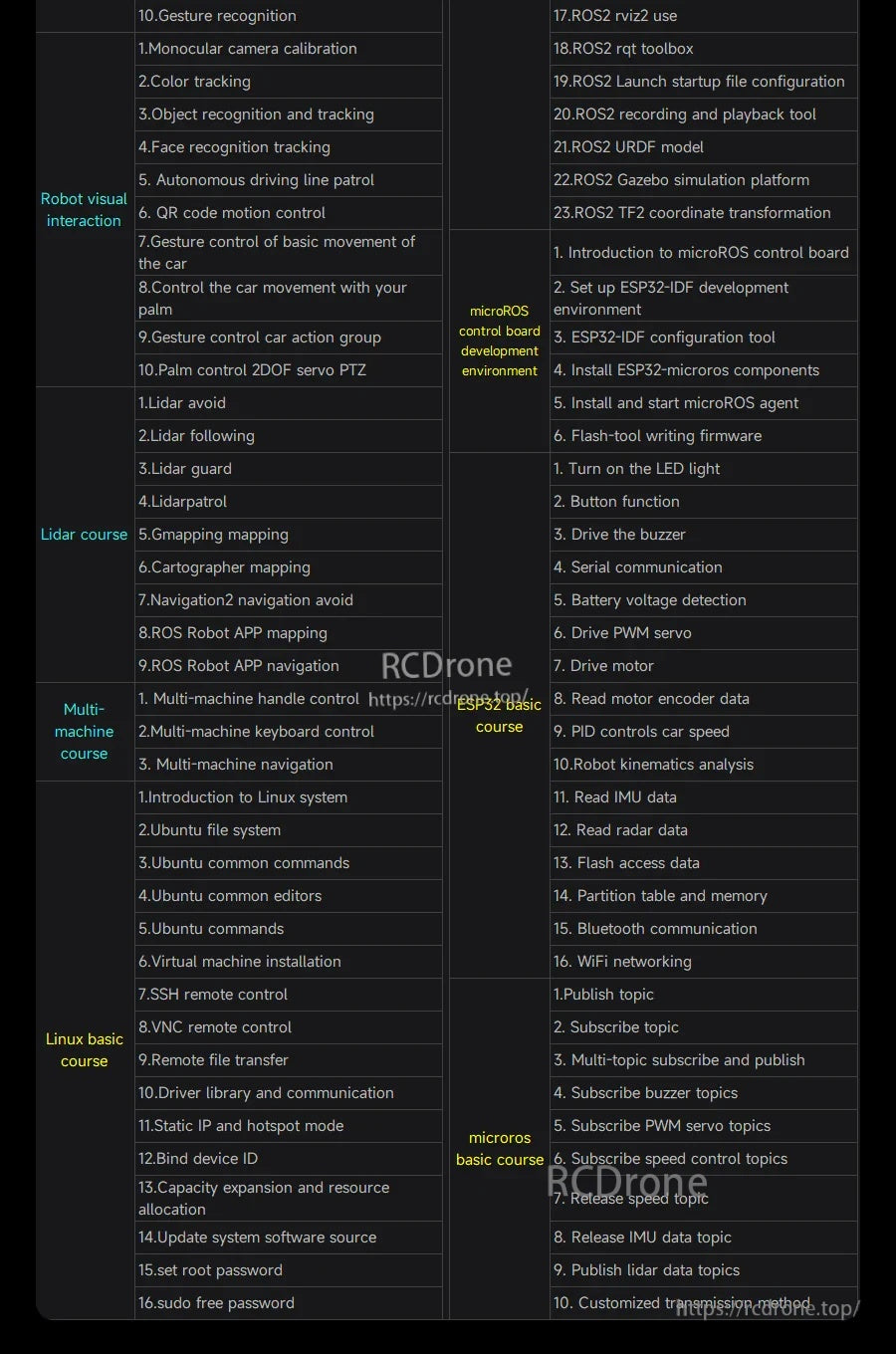
더 깊은 학습에는 인식 파이프라인, 내비게이션 스택, 마이크로컨트롤러 측 개발 작업이 포함됩니다.
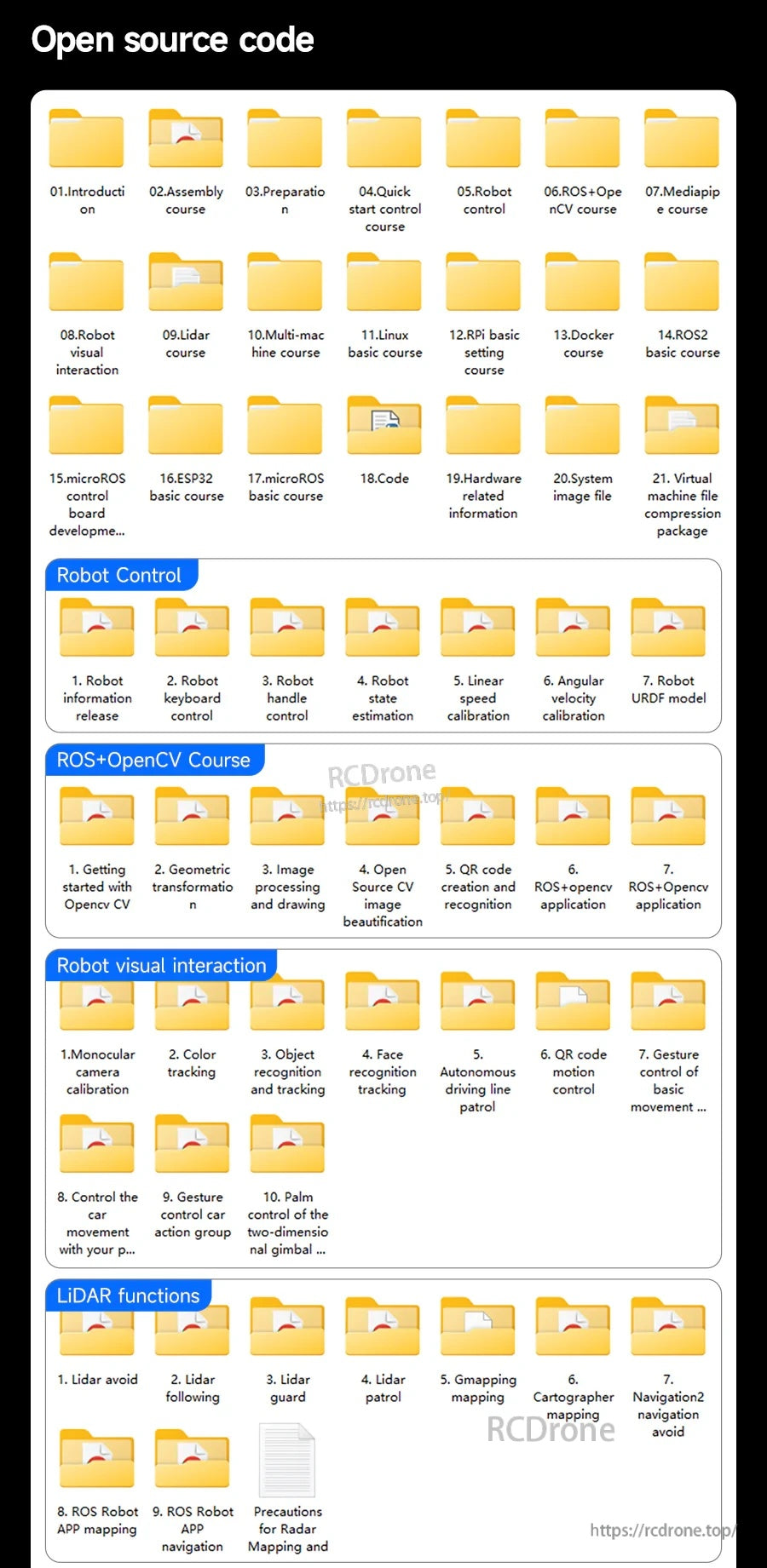
오픈 소스 프로젝트 구조는 데모를 빠르게 찾고 코드를 자신의 ROS2 패키지에 적응시키는 데 도움을 줍니다.
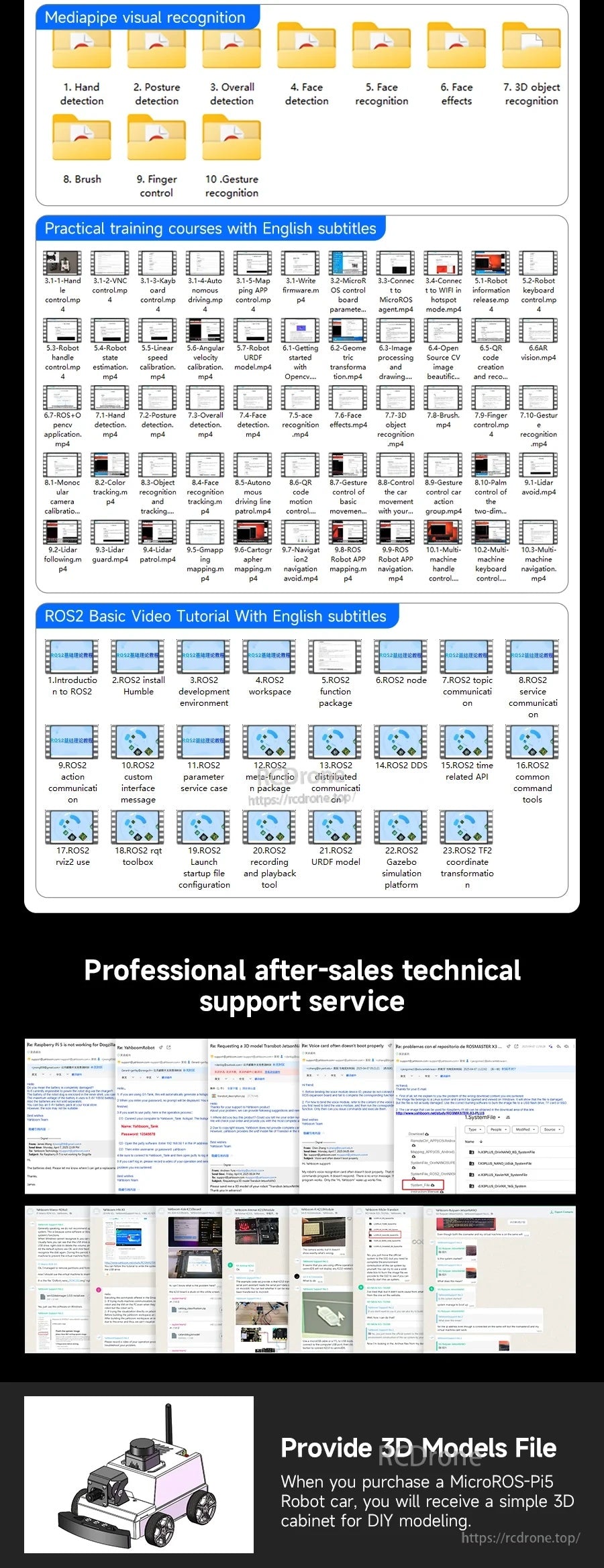
MicroROS-Pi5 ROS2 로봇 리소스에는 영어 자막이 있는 체계적인 교육 자료, 기술 지원, 다운로드 가능한 3D 모델 파일이 포함되어 있습니다.
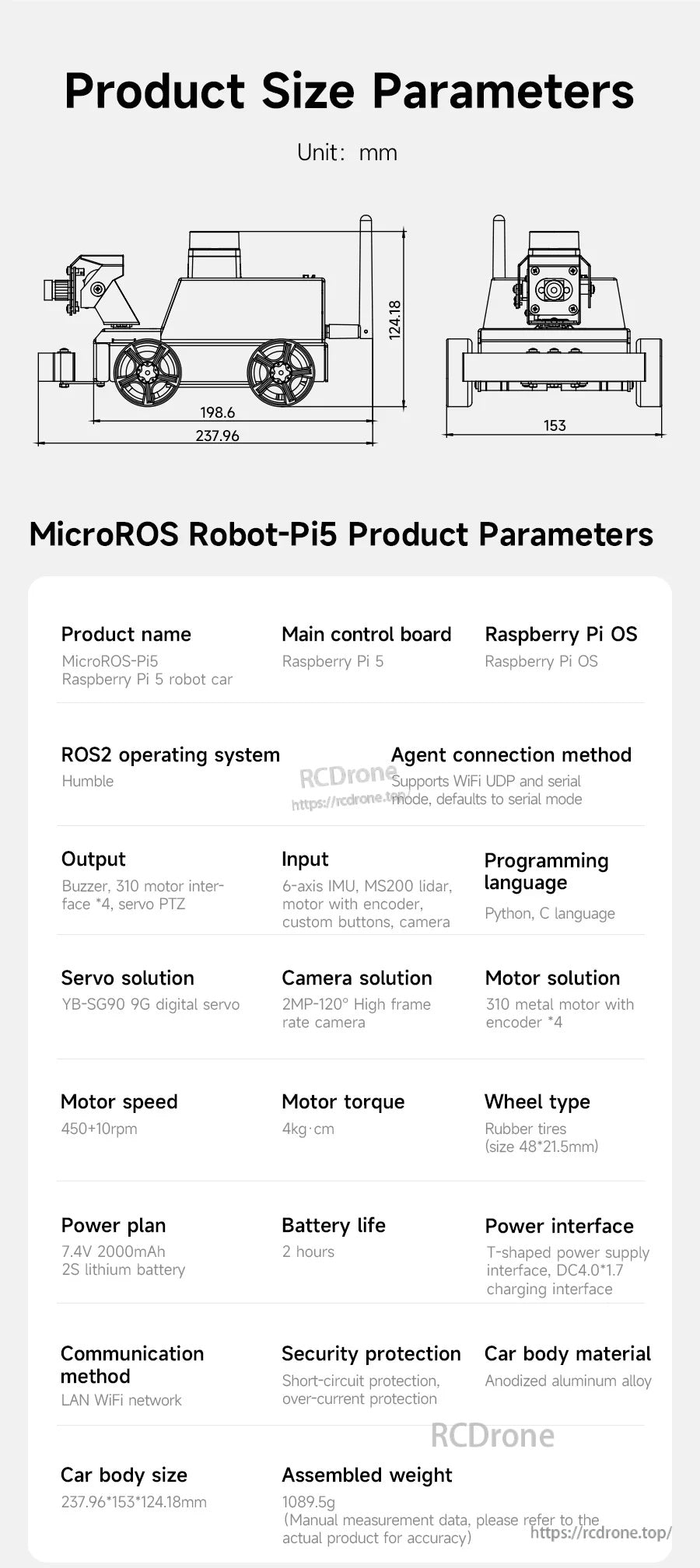
MicroROS Robot-Pi5의 치수와 빠른 사양 개요는 Raspberry Pi 5 컨트롤러 주변의 섀시 공간 및 ROS2 (Humble) 설정을 계획하는 데 도움을 줍니다.
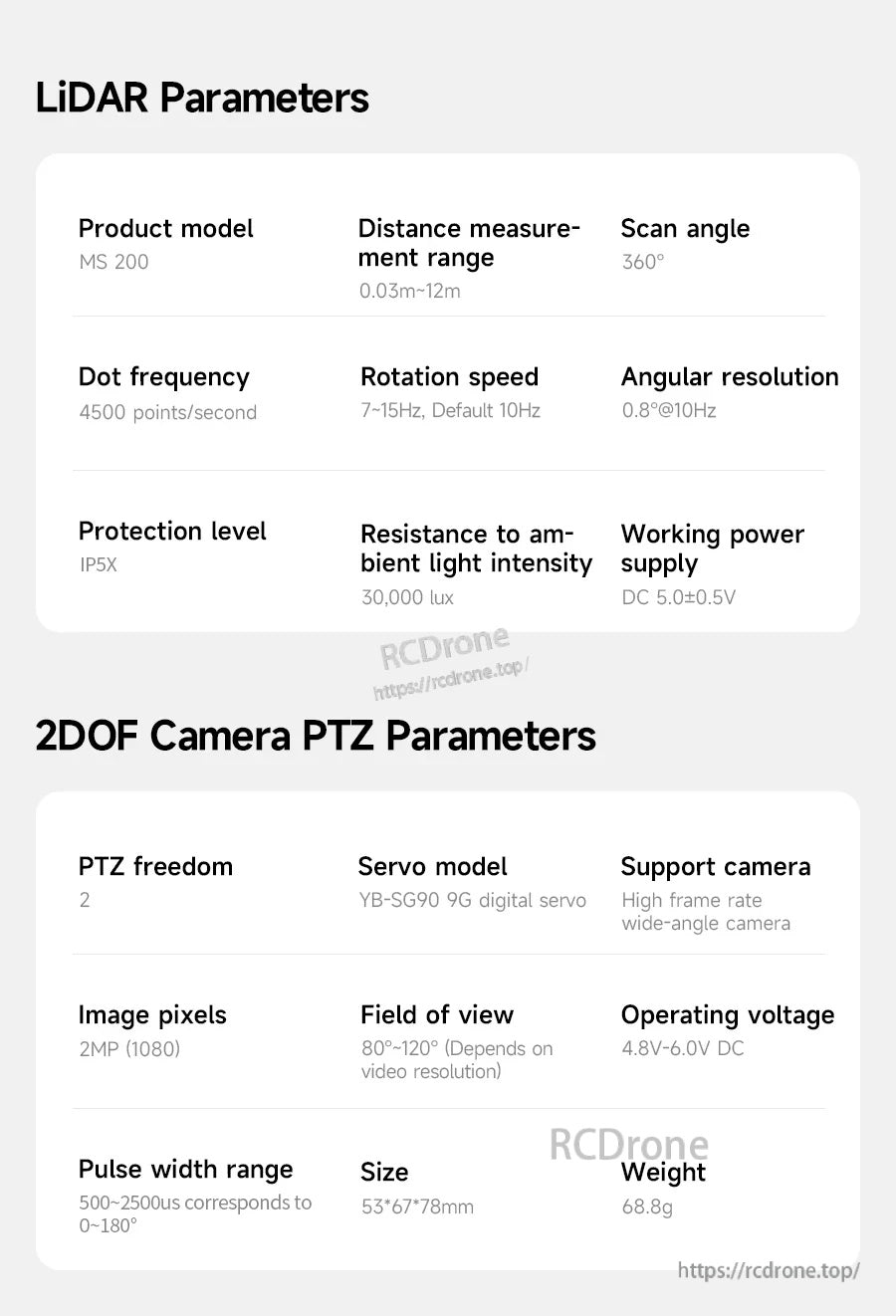
MS200 LiDAR 및 2DOF 카메라 PTZ 모듈은 360° 스캔 각도, 0.03–12 m 범위 및 작동 전압과 같은 주요 설정 사양을 나열합니다.
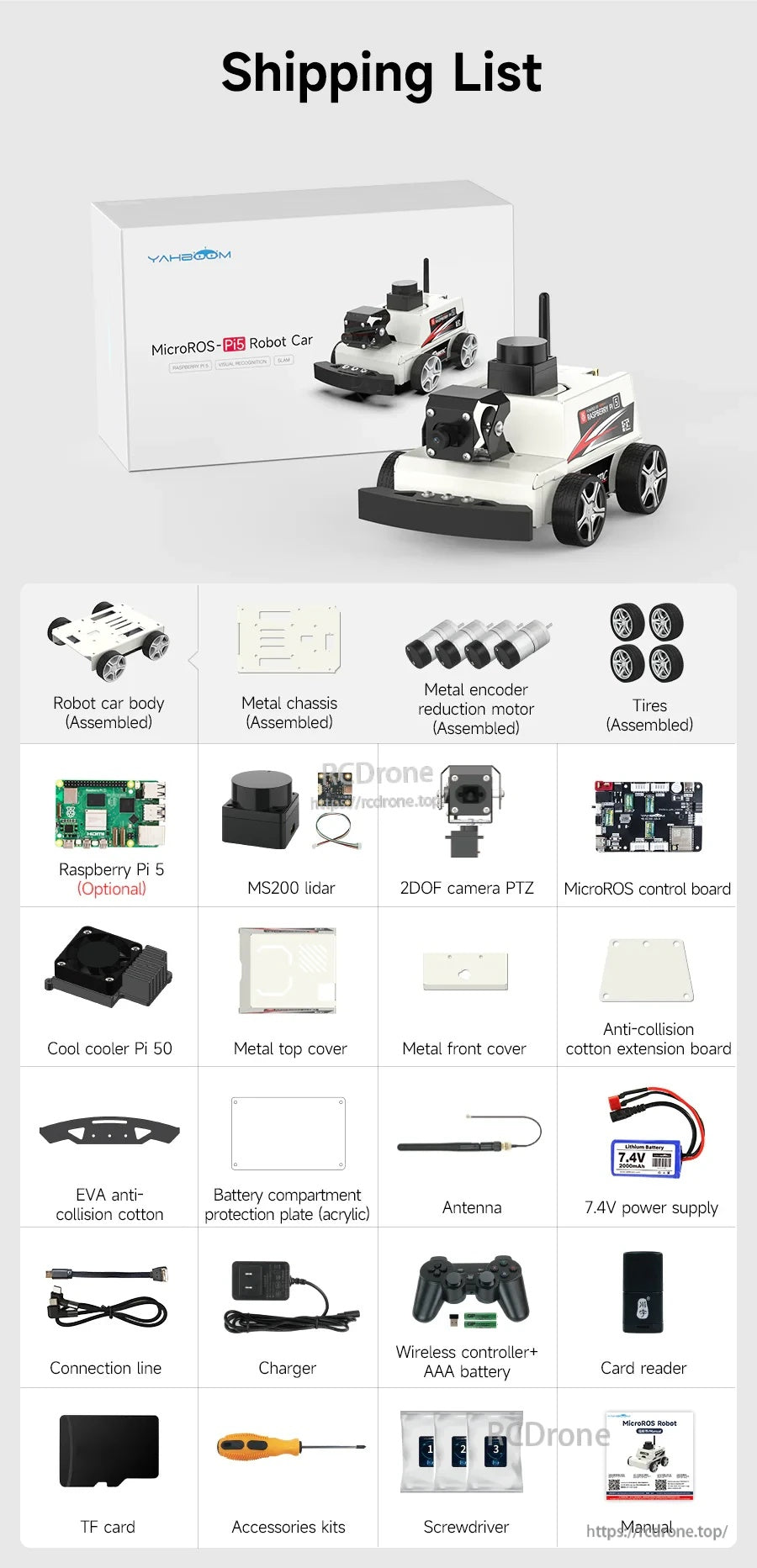
MicroROS-Pi5 ROS2 로봇 자동차 키트에는 조립된 섀시와 바퀴, 모터 세트, MS200 LiDAR, 200° 카메라 PTZ, 제어 보드, 커버, 컨트롤러 및 케이블과 충전기와 같은 주요 액세서리가 포함되어 있습니다.













