





야붐 MPU6050 6축 IMU 센서 모듈 (3축 자이로 + 가속도계), IIC 400kHz, 3-5V, 16비트
야붐 MPU6050 6축 IMU 센서 모듈 (3축 자이로 + 가속도계), IIC 400kHz, 3-5V, 16비트
yahboom
픽업 사용 가능 여부를 로드할 수 없습니다.
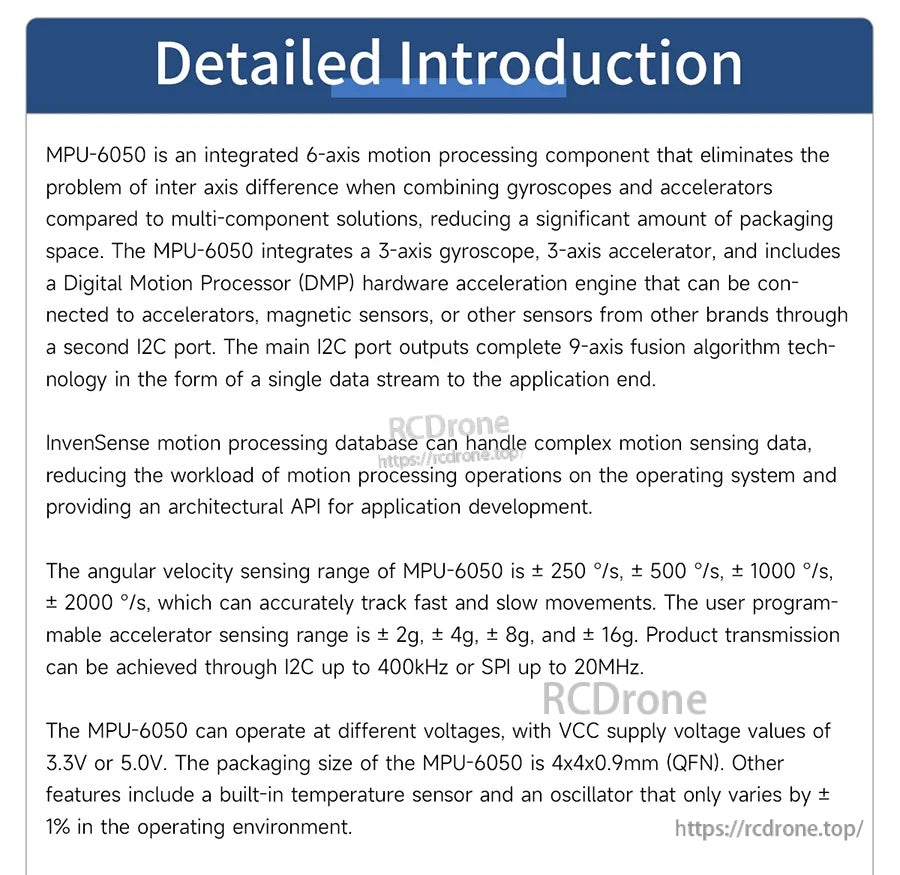
개요
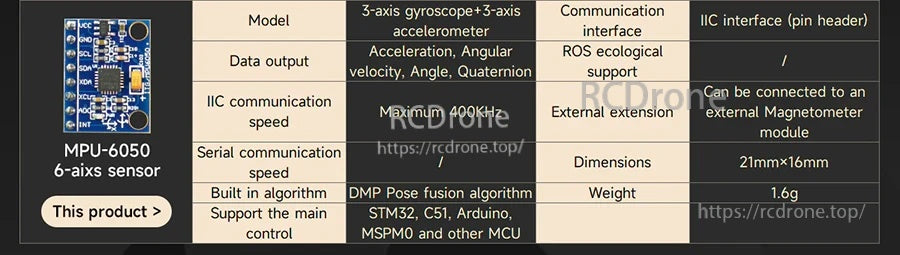
Yahboom MPU6050 센서 모듈은 로봇 및 균형차 프로젝트에서 운동 및 자세 측정을 위해 설계된 6축 센서 모듈(3축 자이로스코프 + 3축 가속도계)입니다. 이 모듈은 표준 IIC 통신 프로토콜을 사용하며 내장된 16비트 AD 변환기를 통해 16비트 데이터 출력을 제공합니다.
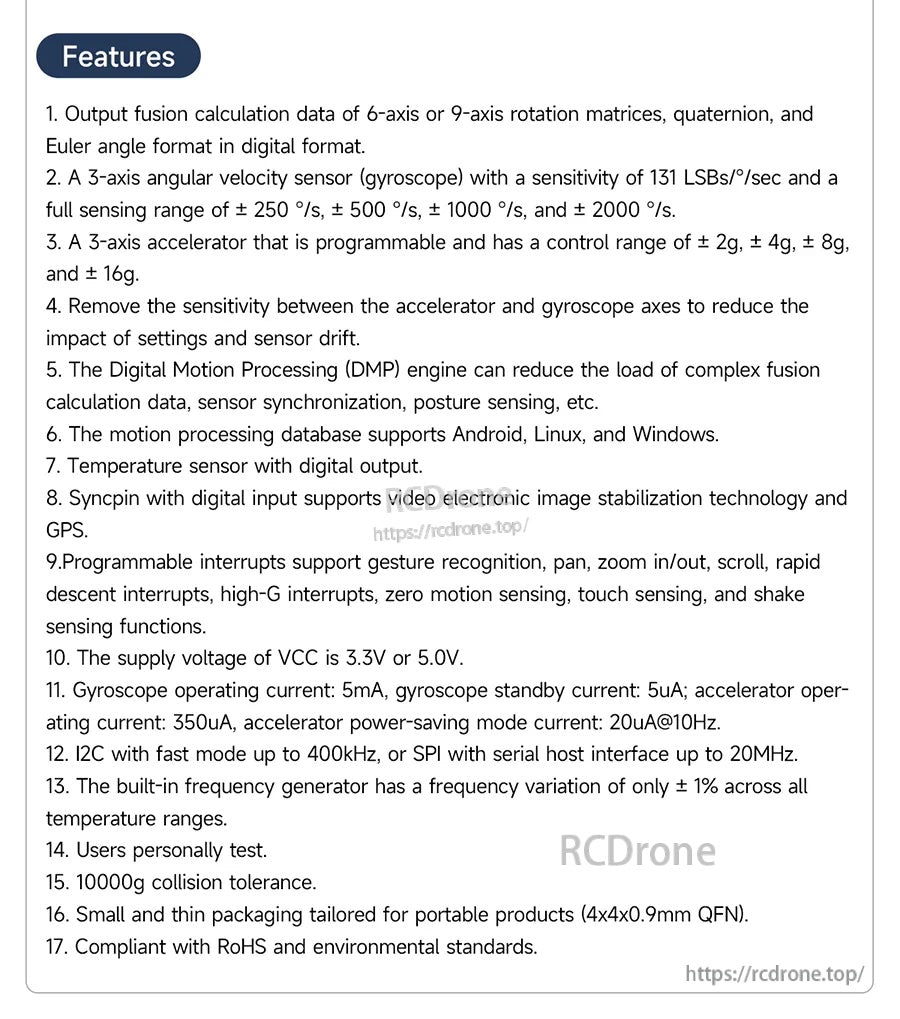
주요 특징
- 칩: MPU-6050
- IIC 인터페이스 (핀 헤더); 표준 IIC 통신 프로토콜
- 전송 속도: 400kHz (IIC) (최대)
- 데이터 출력: 가속도, 각속도, 각도, 쿼터니언 (마이크로컨트롤러를 통해 오일러 각도 및 회전 행렬로 변환 가능)
- 내장 알고리즘: DMP 포즈 융합 알고리즘
- 외부 인터페이스: 외부 자기계 모듈에 연결 가능
- INT 인터럽트 트리거 핀
- 핀 헤더는 기본적으로 납땜되지 않음 (수동 납땜 필요)
사양
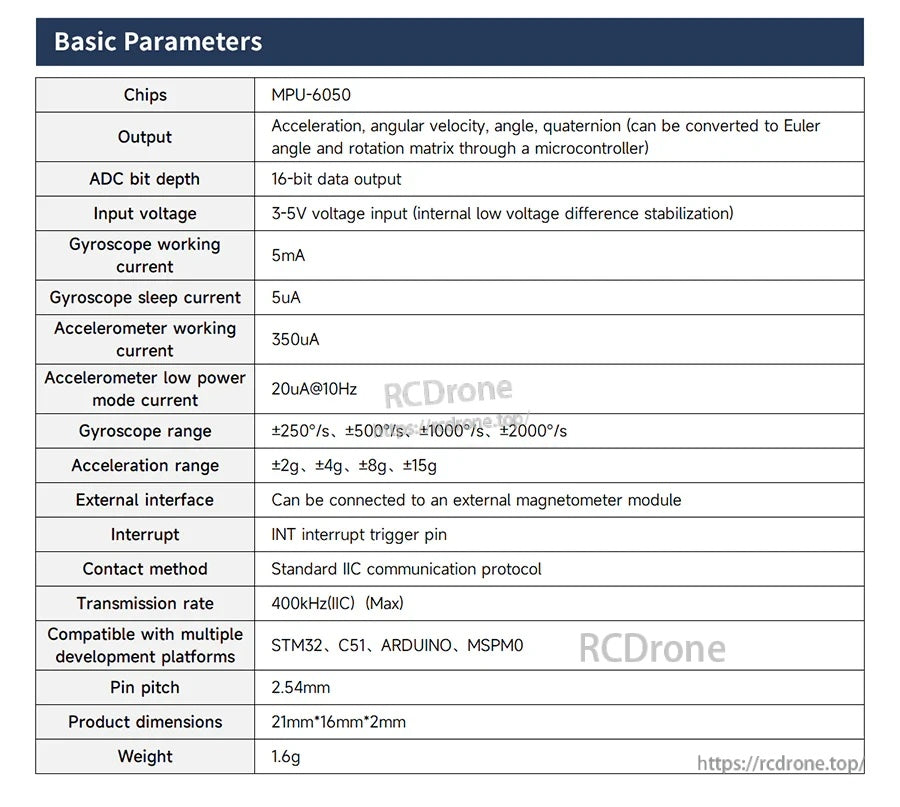
| 칩 | MPU-6050 |
| 센서 유형 / 모델 | 3축 자이로스코프 + 3축 가속도계 |
| 데이터 출력 | 가속도, 각속도, 각도, 쿼터니언 (마이크로컨트롤러를 통해 오일러 각도 및 회전 행렬로 변환 가능) |
| ADC 비트 깊이 | 16비트 데이터 출력 |
| 입력 전압 | 3-5V 전압 입력 (내부 저전압 차 안정화) |
| 자이로스코프 작동 전류 | 5mA |
| 자이로스코프 대기 전류 | 5uA |
| 가속도계 작동 전류 | 350uA |
| 가속도계 저전력 모드 전류 | 20uA@10Hz |
| 자이로스코프 범위 | ±250°/s, ±500°/s, ±1000°/s, ±2000°/s |
| 가속도 범위 | ±2g, ±4g, ±8g, ±16g |
| 통신 / 접촉 방법 | 표준 IIC 통신 프로토콜 |
| IIC 통신 속도 | 최대 400KHz |
| 전송 속도 | 400kHz (IIC) (최대) |
| 외부 인터페이스 | 외부 자기계 모듈에 연결할 수 있습니다 |
| 인터럽트 | INT 인터럽트 트리거 핀 |
| 호환 가능한 개발 플랫폼 | STM32, C51, ARDUINO, MSPM0 |
| 핀 피치 | 2.54mm |
| 제품 치수 | 21mm*16mm*2mm |
| 치수 (또한 나열됨) | 21mm*16mm |
| 무게 | 1.6g |
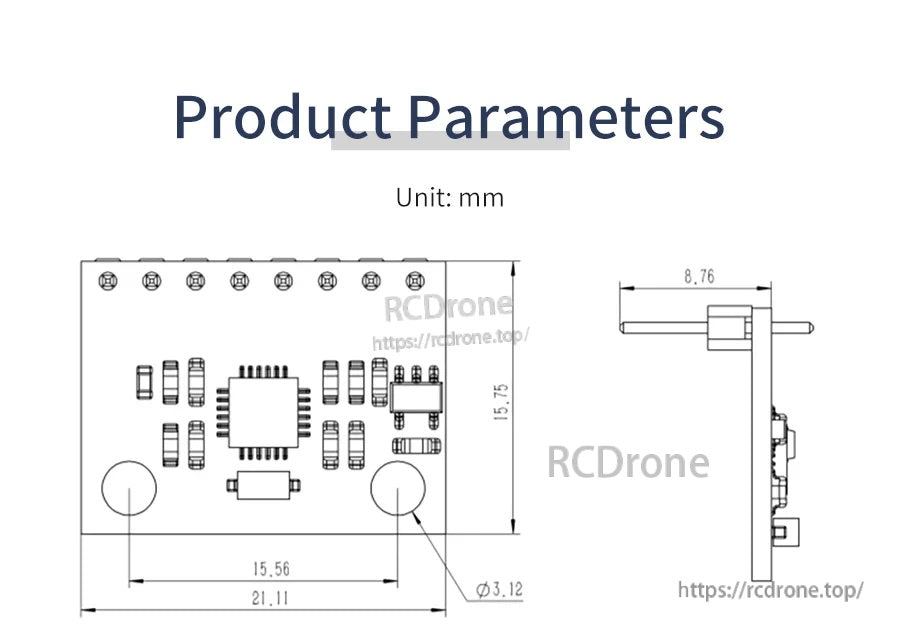
| 기계 도면 (단위: mm) | 21.11 (길이), 15.75 (높이), 8.76 (측면 치수), Φ3.12 (장착 구멍 직경), 15.56 (내부 간격) |
핀 배치 & 배선 (IIC)
모듈 핀 레이블
- VCC, GND, SCL, SDA, XDA, XCL, AD0, INT
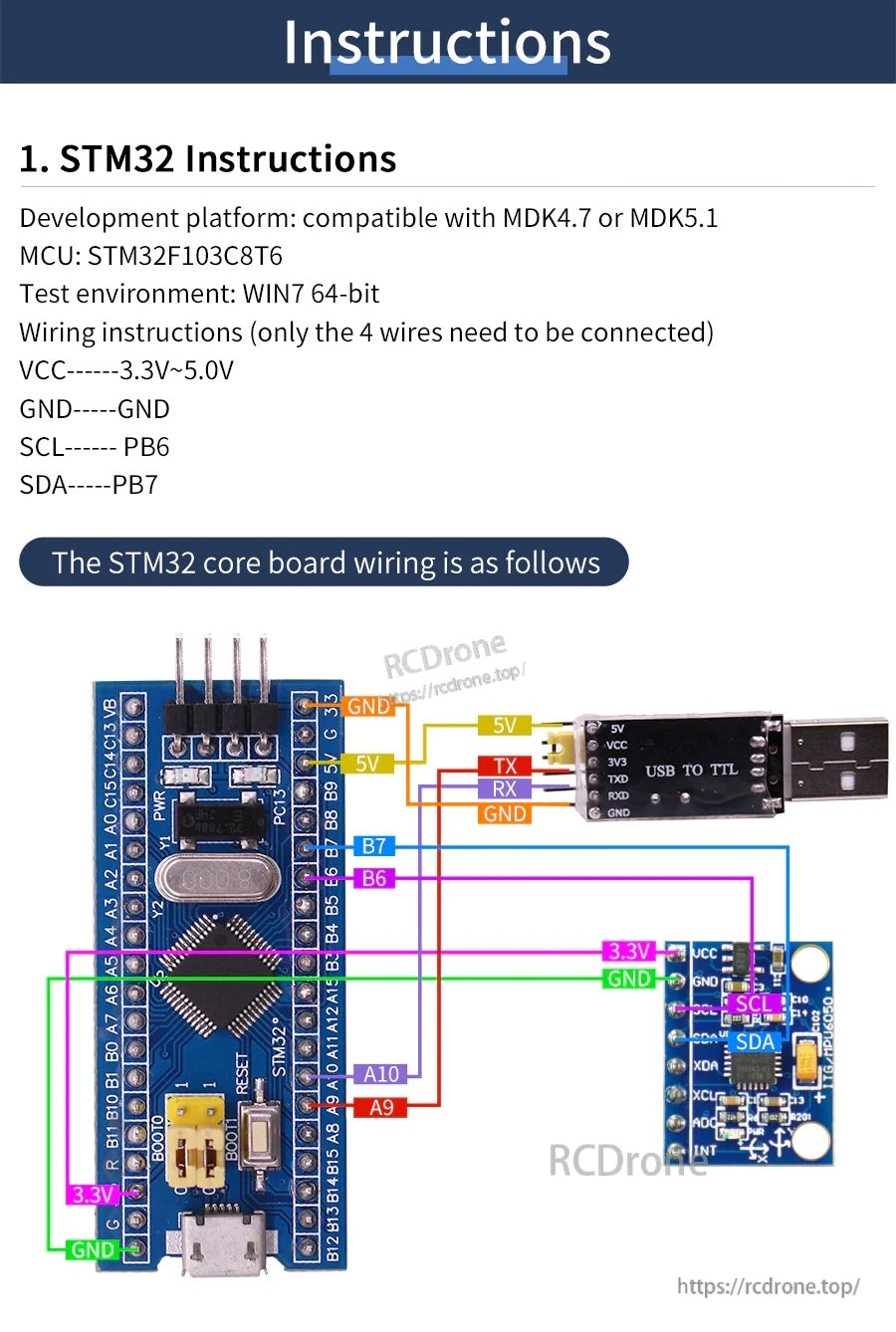
STM32 배선 노트 (예시)
- VCC: 3.3V~5.0V
- GND: GND
- SCL: PB6
- SDA: PB7
- 예시 환경: MCU STM32F103C8T6; 개발 플랫폼은 MDK4.7 또는 MDK5와 호환됩니다.1; 테스트 환경 WIN7 64비트
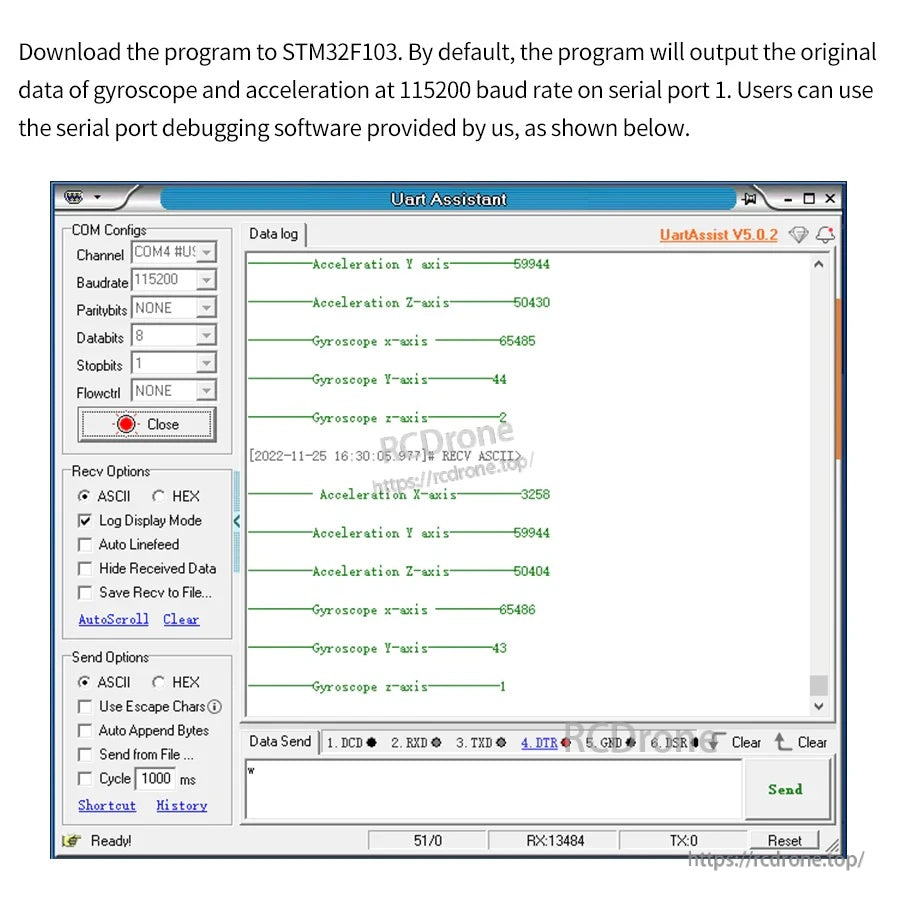
- 예제 프로그램 출력: 직렬 포트 1에서 115200 보드레이트로 원본 자이로스코프 및 가속도 데이터
기타 보드 배선 노트 (예제)
- VCC: 3.3V~5.0V
- GND: GND
- SCL: SCL
- SDA: SDA
- 예제 환경: 개발 플랫폼 버전 1.6.5; MUC: AR-Board; 테스트 환경 WIN7 64비트
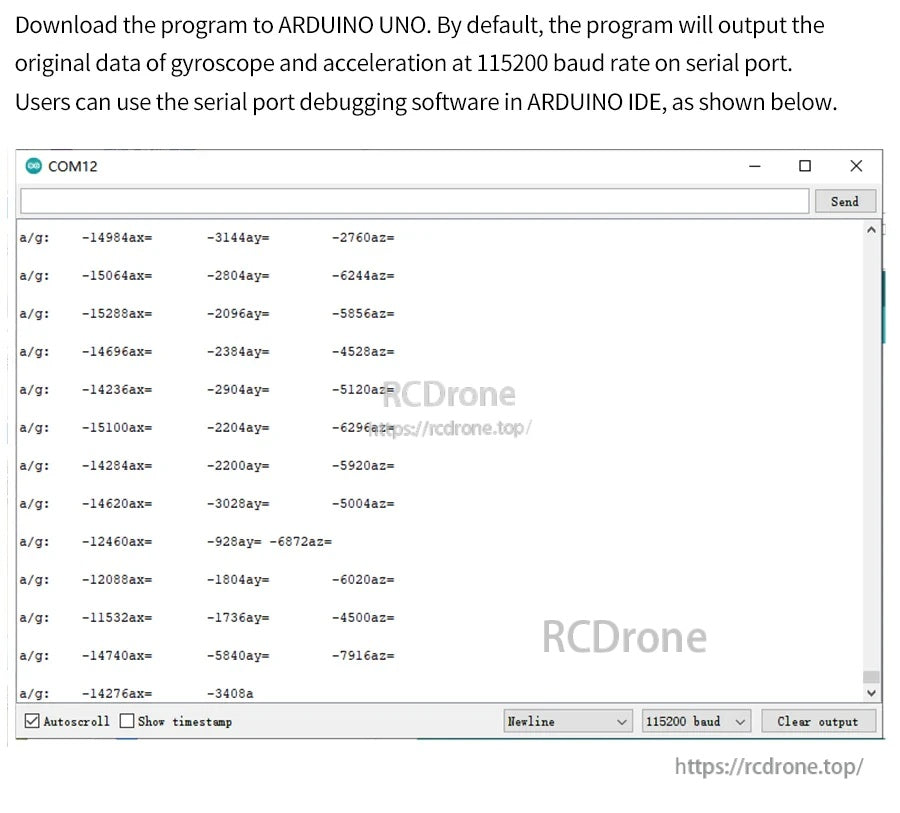
- Arduino UNO 예제 프로그램 출력: 115200 보드레이트에서 직렬 포트의 원본 자이로스코프 및 가속도 데이터
포함된 항목
- MPU6050 모듈 (핀 헤더는 납땜되지 않음) x 1
- 직선 핀 헤더 x 1
- 곡선 핀 헤더 x 1
응용 프로그램
- 균형차 / 자가 균형 차량 프로젝트
- 로봇 자세 감지 및 동작 감지
매뉴얼 / 문서
판매 전 및 기술 지원(배선, 통합 및 모듈 선택)에 대한 문의는 https://rcdrone.top/ 또는 이메일 [email protected] .
상세정보

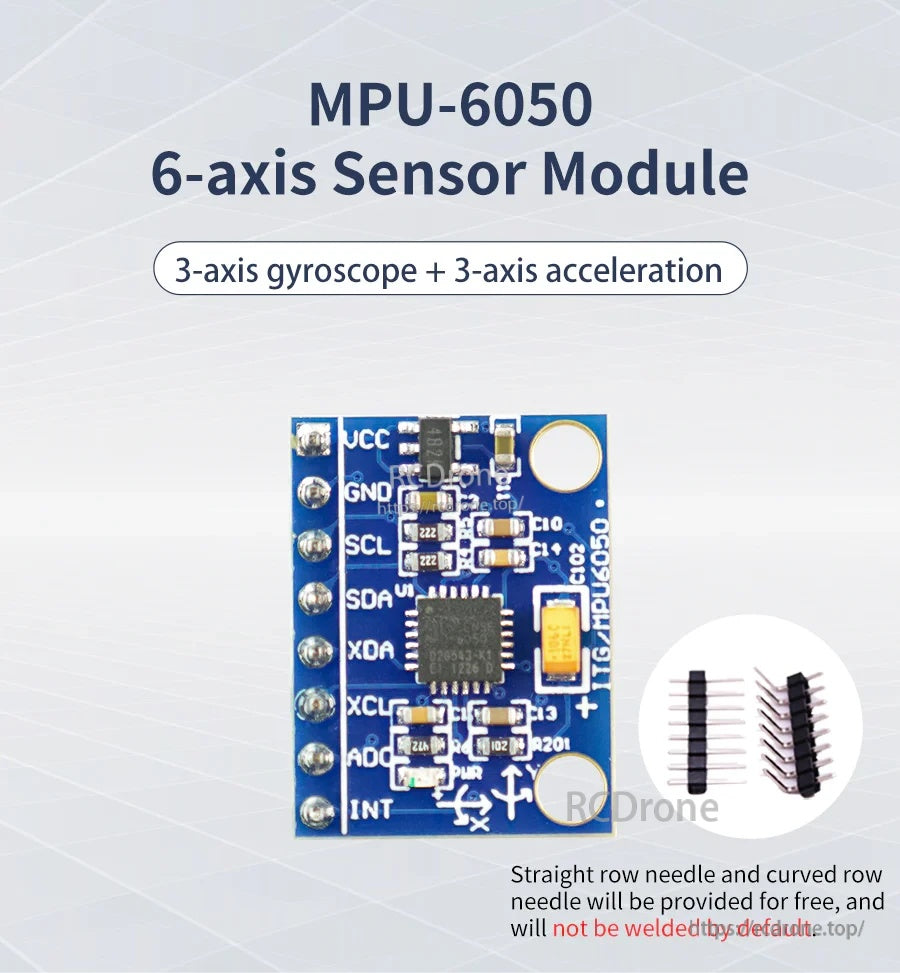
컴팩트 MPU-6050 브레이크아웃은 IIC를 통해 3축 자이로 + 3축 가속도계 데이터를 제공하며, 수동 납땜을 위한 헤더가 제공됩니다.
보드 치수 및 장착 홀 간격은 밀집 로봇 빌드에 쉽게 통합할 수 있도록 제공됩니다.
주요 전기 및 동작 범위는 설계 및 프로토타입 제작 중 빠른 선택을 위해 요약되어 있습니다.
STM32에 대한 간단한 4선 IIC 배선으로 가속도 및 자이로스코프 데이터를 쉽게 읽을 수 있습니다.
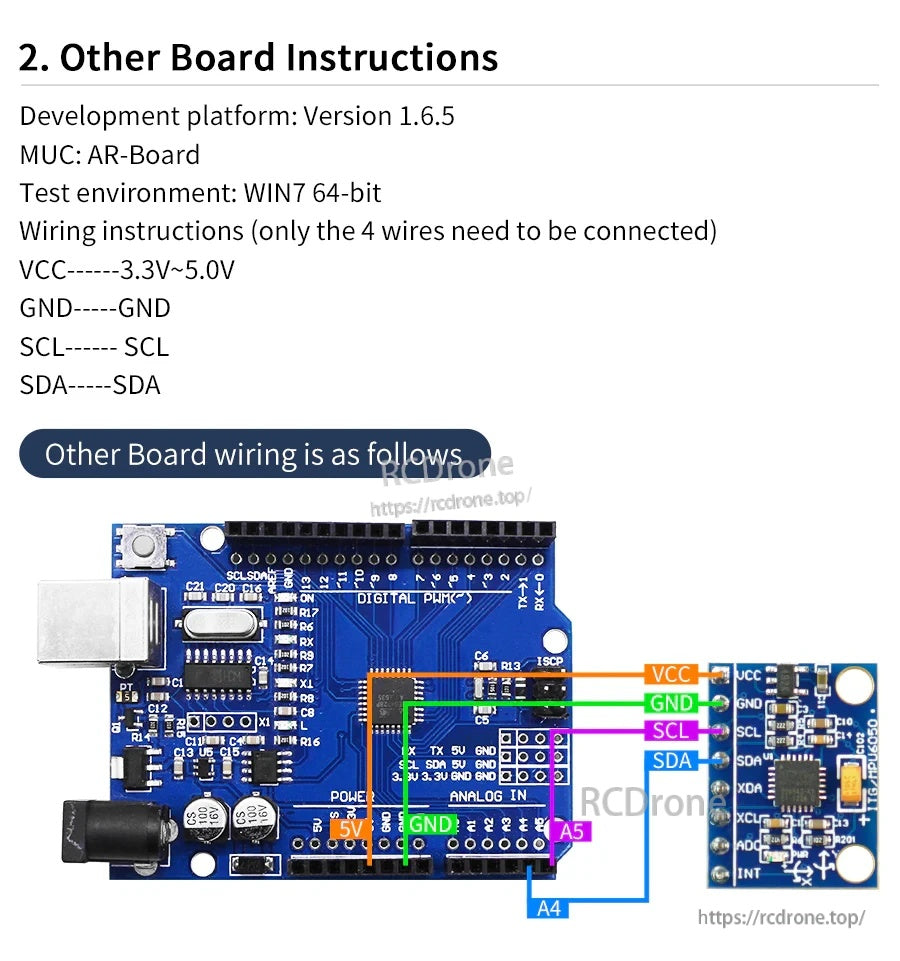
IIC 핀 매핑은 일반 개발 보드에 대해 표시되어 VCC/GND/SCL/SDA를 올바르게 배선할 수 있습니다.

모듈의 명확한 클로즈업은 설치 전에 핀 레이블 및 구성 요소 레이아웃을 확인하는 데 도움이 됩니다.
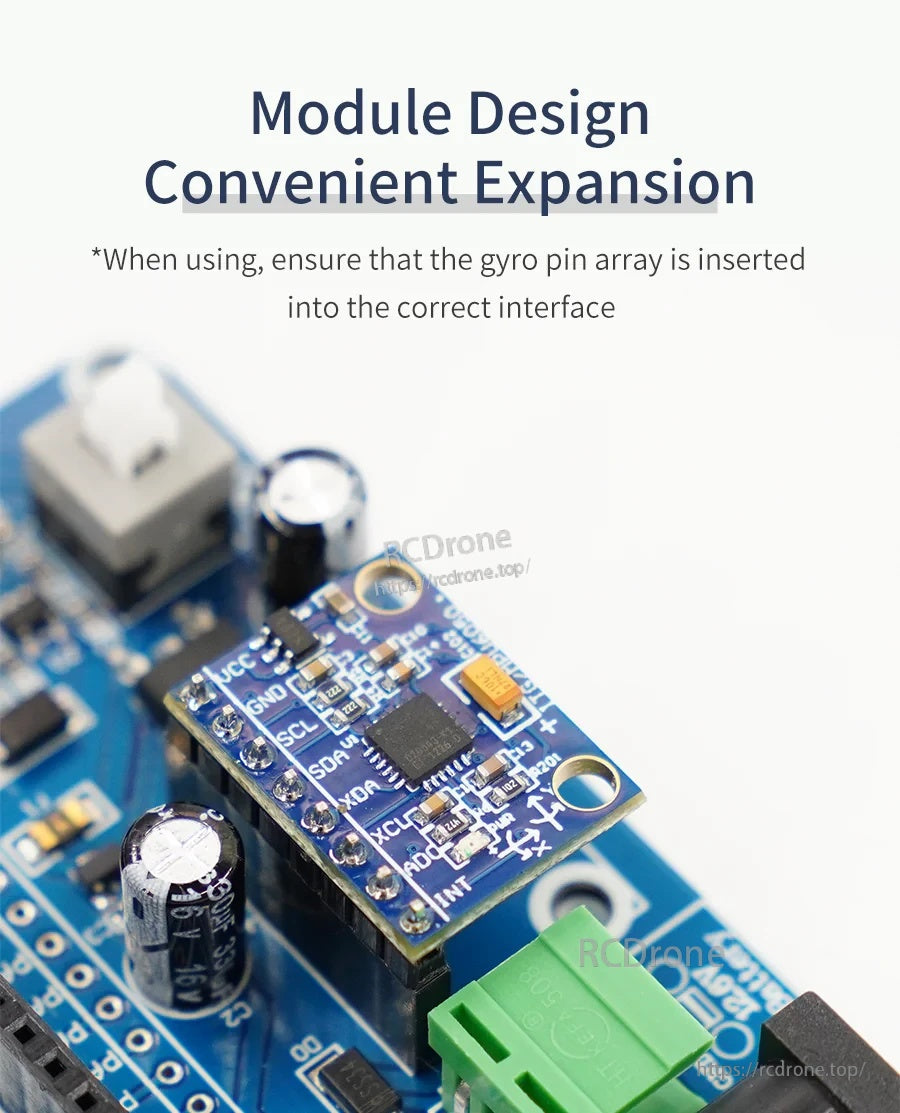
2.54 mm 헤더 인터페이스는 프로토타입 및 제어 보드에서 빠른 플러그인 확장을 지원합니다.
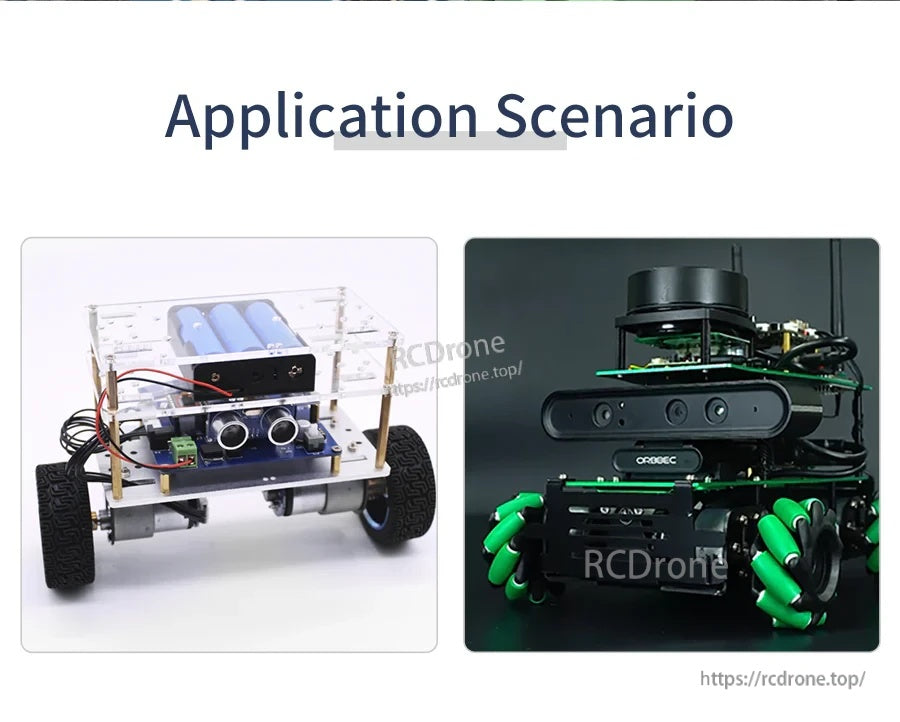
균형 자동차, 모션 추적 및 DIY 로봇 프로젝트에서 자세 측정을 위해 잘 적합합니다.
온라인 튜토리얼 및 예제 파일이 제공되어 Arduino, STM32 및 관련 플랫폼에서 설정 속도를 높입니다.
선택적 참조 루틴 및 문서는 센서 데이터 수집 및 통합을 검증하는 데 도움을 줍니다.

MPU6050 IMU 브레이크아웃 보드는 미리 납땜된 헤더와 쉽게 배선할 수 있도록 명확하게 표시된 I2C 및 전원 핀을 포함합니다.





