








야붐 무토 S2 18DOF AI 비전 헥사포드 로봇 (라즈베리 파이 5 & Jetson NANO용), 2DOF PTZ FPV
야붐 무토 S2 18DOF AI 비전 헥사포드 로봇 (라즈베리 파이 5 & Jetson NANO용), 2DOF PTZ FPV
Yahboom
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
Yahboom Muto S2는 Raspberry Pi 5 또는 NVIDIA Jetson NANO를 메인 컨트롤러로 설계된 18DOF 헥사포드 로봇입니다. 이 로봇은 알루미늄 합금 바디, 18개의 자유도, 그리고 시뮬레이션 걸음을 위한 내장 역기구학 알고리즘 제어를 갖춘 데스크탑 수준의 생체 모방 헥사포드 로봇입니다. Python3 프로그래밍과 OpenCV 이미지 처리를 통해 색상 인식, 추적/팔로우, 얼굴 추적, QR 코드 인식, 시각적 라인 순찰과 같은 AI 시각적 상호작용 기능을 지원합니다. 제어 방법에는 모바일 앱, 무선 핸들 제어, 컴퓨터 웹 페이지(Jupyter Lab) 제어가 포함되며, 실시간 비디오 전송(FPV)을 제공합니다.
주요 특징
- AI 비전 헥사포드 로봇: 역기구학 알고리즘, 생체 모방 걸음, 18DOF 관절, AI 시각적 상호작용.
- 18DOF 모션 관절: 18개의 고성능 서보와 알루미늄 합금 구조 부품을 사용하여 각 다리에 세 개의 관절을 연결합니다.
- 35KG 스마트 시리얼 버스 서보 시스템: 18PCS 35KG 메탈 서보.
- 2D 카메라 PTZ: 비전 응용을 위한 2DOF 카메라 PTZ.
- 실시간 비디오 전송: 모바일 앱을 통해 로컬 네트워크에 연결하여 HD 비디오 영상을 실시간으로 시청할 수 있습니다.
- 자세 & 움직임 조정 : 걷기 속도 및 로봇 본체 높이의 자유로운 조정을 지원합니다 (로봇 높이 조정 / 로봇 속도 조정; 걷기 속도 조정: 느림/빠름).
- 교육 모드: 호스트 기기의 단일 다리 움직임을 수동으로 제어하면 다른 슬레이브 기기가 동일한 동작을 수행합니다.
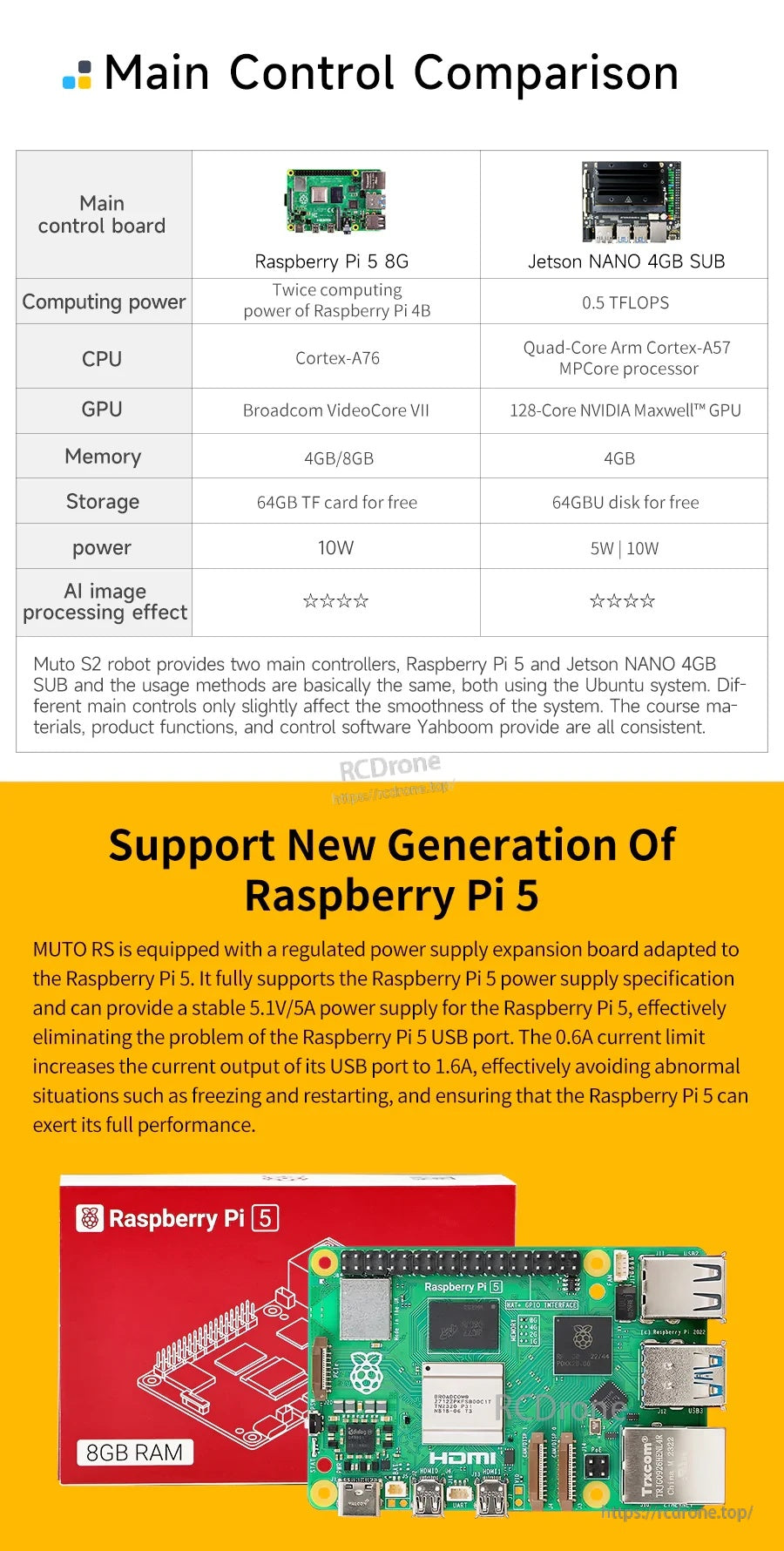
- 라즈베리 파이 5 지원 참고: “MUTO RS는 라즈베리 파이 5에 적합한 조절 전원 공급 확장 보드”를 장착하여 안정적인 5.1V/5A 전원을 제공합니다; 0.6A 전류 제한은 USB 포트 전류 출력을 1로 증가시킵니다.6A (동결/재시작 방지를 위해).
선택 도움 및 애프터 서비스 지원을 위해 https://rcdrone.top/에 문의하거나 이메일 [email protected].
사양
| 모델 | Muto S2 |
| 로봇 유형 | AI 비전 헥사포드 로봇 |
| 자유도 | 18DOF (18 자유도) |
| 바디 소재 | 알루미늄 합금 |
| 서보 | 18PCS 35KG 메탈 서보; 35KG 스마트 시리얼 버스 서보 |
| 카메라 | 2MP 1080 HD 카메라; USB 1080P 카메라 |
| 카메라 짐벌 | 2DOF 카메라 PTZ |
| 배터리 | 7.4V 9900mAh 배터리 팩 (9900mAh) |
| 메인 컨트롤러 호환성 | Raspberry Pi 5 / Jetson NANO |
| 프로그래밍 | Python3 |
| 비전 스택 | OpenCV 이미지 처리; AI 시각적 상호작용; 딥러닝 |
| 원격 제어 | 모바일 앱, 무선 핸들, 컴퓨터 웹 페이지 (Jupyter Lab); WiFi 제어 |
메인 컨트롤 비교 (제공됨)
| 메인 컨트롤 보드 | Raspberry Pi 5 8G | Jetson NANO 4GB SUB |
| 컴퓨팅 파워 | Raspberry Pi 4B의 두 배 컴퓨팅 파워 | 0.5 TFLOPS |
| CPU | Cortex-A76 | 쿼드 코어 Arm Cortex-A57 MPCore 프로세서 |
| GPU | Broadcom VideoCore VII | 128코어 NVIDIA Maxwell GPU |
| 메모리 | 4GB/8GB | 4GB |
| 저장소 | 64GB TF 카드 무료 제공 | 64GB U 디스크 무료 제공 |
| 전원 | 10W | 5W | 10W |
| AI 이미지 처리 효과 | ★★★★ | ★★★ |
Muto S2 로봇은 두 가지 주요 컨트롤러, Raspberry Pi 5와 Jetson NANO 4GB SUB를 제공하며, 사용 방법은 기본적으로 동일하며 모두 Ubuntu 시스템을 사용합니다. 다른 주요 컨트롤은 시스템의 부드러움에 약간의 영향을 미칩니다.코스 자료, 제품 기능 및 제공된 제어 소프트웨어는 일관성이 있습니다.
기능 목록 (코스/예제)
카메라 PTZ
- 00. 색상 HSV 값 보정
- 01. 색상 인식
- 02. 색상 추적
- 03. 색상 따라가기
- 04. 색상 인식 동작 그룹
- 05. 얼굴 인식
- 06. 얼굴 추적
- 07. 사람에게 인사하기
- 08. QR 코드 인식
- 09. QR 코드 지시사항
- 10. 시각적 라인 따라가기
- 11. 동작 학습
- 12. 티치 펜던트 동기화 동작
기계 심층 학습
- 01. KNN
- 02. TensorFlow 기본 튜토리얼
- 03. PyTorch 기본 사용법
- 04. Yolov5 실시간 객체 탐지
- 05. Jetson-inference 환경 구축
- 06. 객체 탐지 및 동작
- 07.신체 움직임 제어 로봇
- 08. 제스처 제어 로봇
Jetson NANO 과정
- 1. JetsonNano 시스템 소개
- 2. 네트워크 구성 및 Jtop
- 3. 스왑 공간 증가
- 4. GPIO 라이브러리의 API 사용법
- 5. 하드웨어 라이브러리 구성
- 6. 핀 읽기 기능
- 7. 핀 레벨 출력 제어
- 8. LED 제어
- 9. Jetson Nano의 외부 장치 시리얼 포트 통신
- 10. Jetson nano I2C 통신
원격 제어 과정
- 1. APP 제어 프로세스 종료
- 2. 모바일 APP 원격 제어 튜토리얼
- 3. USB 무선 핸들 원격 제어
로봇 기본 과정
- 1. 버저 제어
- 2. PWM 서보 제어
- 3. 버스 서보 제어
- 4. 로봇 전진 및 후진
- 5.로봇 좌우 이동
- 6. 로봇 좌우 회전
- 7. 높이 조절
- 8. 머리 조절
- 9. 액션 그룹 성능
- 10. 데이터 읽기
- 11. 호스트 컴퓨터 제어
- 12. 카메라 드라이버
라즈베리 파이 과정
- 1. 파이썬 환경 구축
- 2. 헬로월드
- 3. 핀 출력 고저 레벨
- 4. 핀 고저 레벨 읽기
- 5. PWM 출력
- 6. 직렬 통신
- 7. I2C 통신
- 8. 직렬 통신
- 9. I2C 통신
오픈 소스 CV 과정
- 1. 오픈 소스 CV 소개
- 2. 이미지 읽기 및 표시
- 3. 사진 쓰기
- 4. 이미지 품질
- 5. 픽셀 작업
- 6. 이미지 확대
- 7. 사진 자르기
- 8. 사진 팬
- 9. 사진 반전
- 10. 어파인 변환
- 11. 사진 회전
- 12. 원근 변환
- 13. 그레이스케일 처리
- 14. 이진 이미지
- 15. 엣지 그린 감지
- 16. 선분 그리기
- 17. 직사각형 원 그리기
- 18. 텍스트 및 사진 그리기
비디오
매뉴얼 / 튜토리얼
튜토리얼 링크 (공식): http://www.yahboom.net/study/Muto-S2
세부사항
18DOF 바이오닉 헥사포드 플랫폼은 역기구학 보행 제어와 카메라 기반 AI 상호작용을 결합합니다.

로봇 학습, 비전 프로젝트 및 보행 실험을 위해 Raspberry Pi 5 또는 NVIDIA Jetson Nano에서 실행되도록 설계되었습니다.

주요 기능에는 OpenCV 기반 비전 기능, Python 프로그래밍, WiFi 제어 및 FPV 비디오 스트리밍이 포함됩니다.
Raspberry Pi 5 또는 Jetson Nano를 메인 컨트롤러로 선택하고, Pi 5의 안정성을 위한 전원 확장 보드 옵션을 제공합니다.
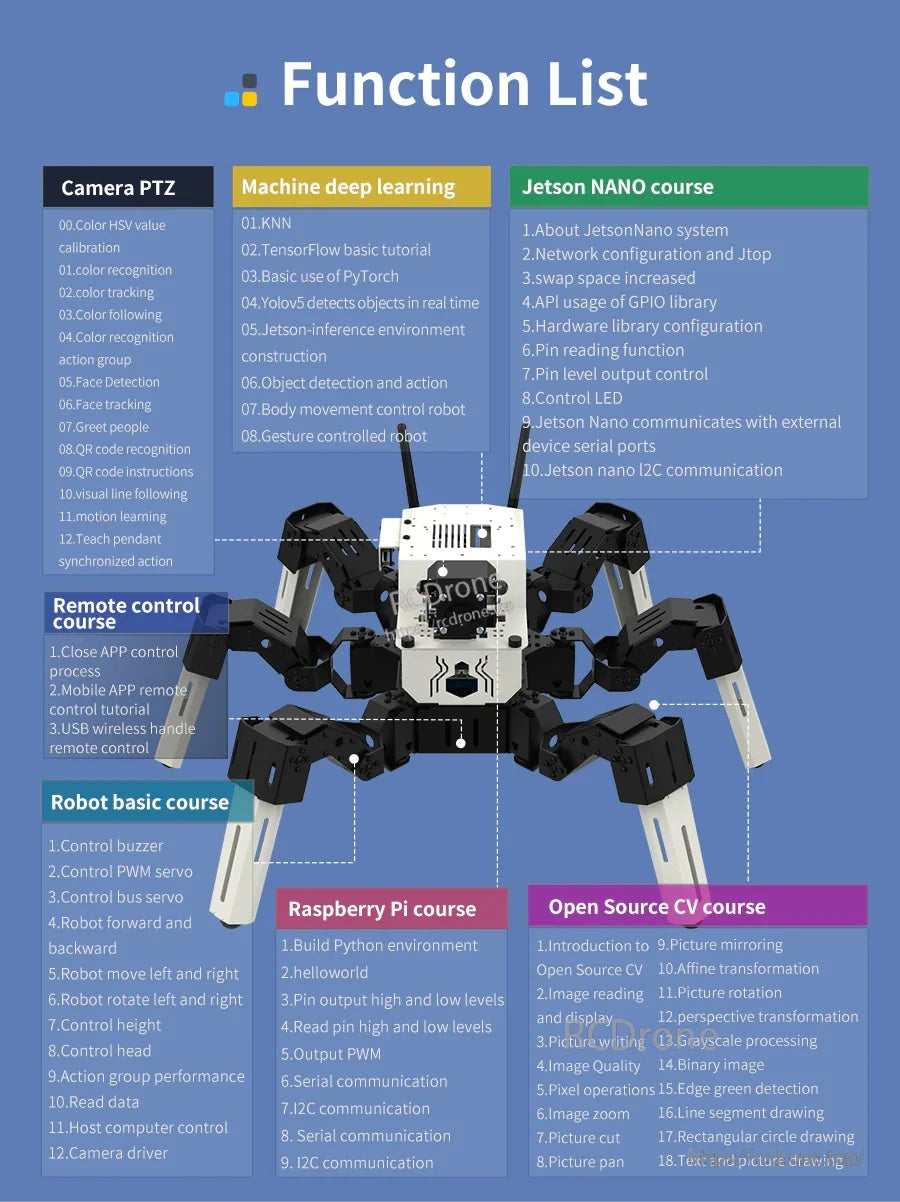
구조화된 기능 목록과 학습 경로는 PTZ 비전, 딥러닝 기초, 두 컨트롤러에 대한 단계별 과정을 포함합니다.
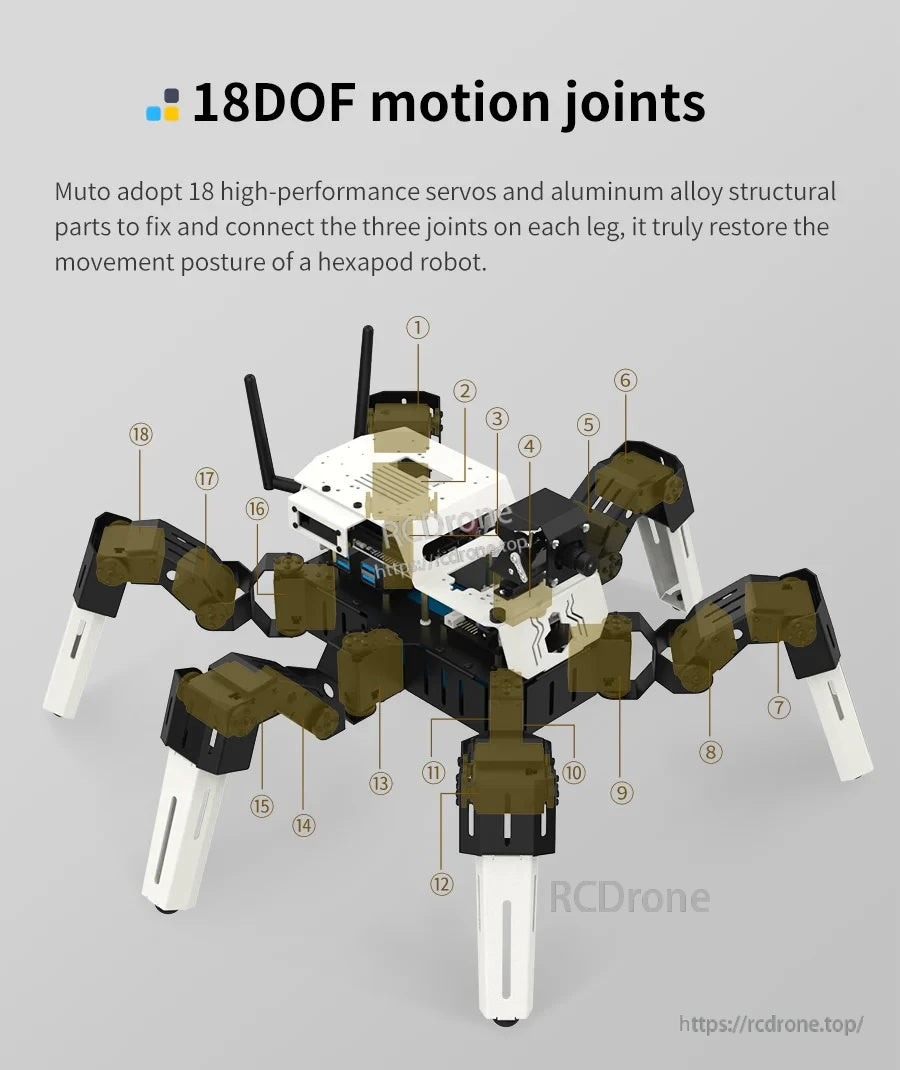
18개의 고토크 서보가 각 다리의 세 관절을 구동하여 안정적이고 관절이 있는 헥사포드 움직임을 제공합니다.
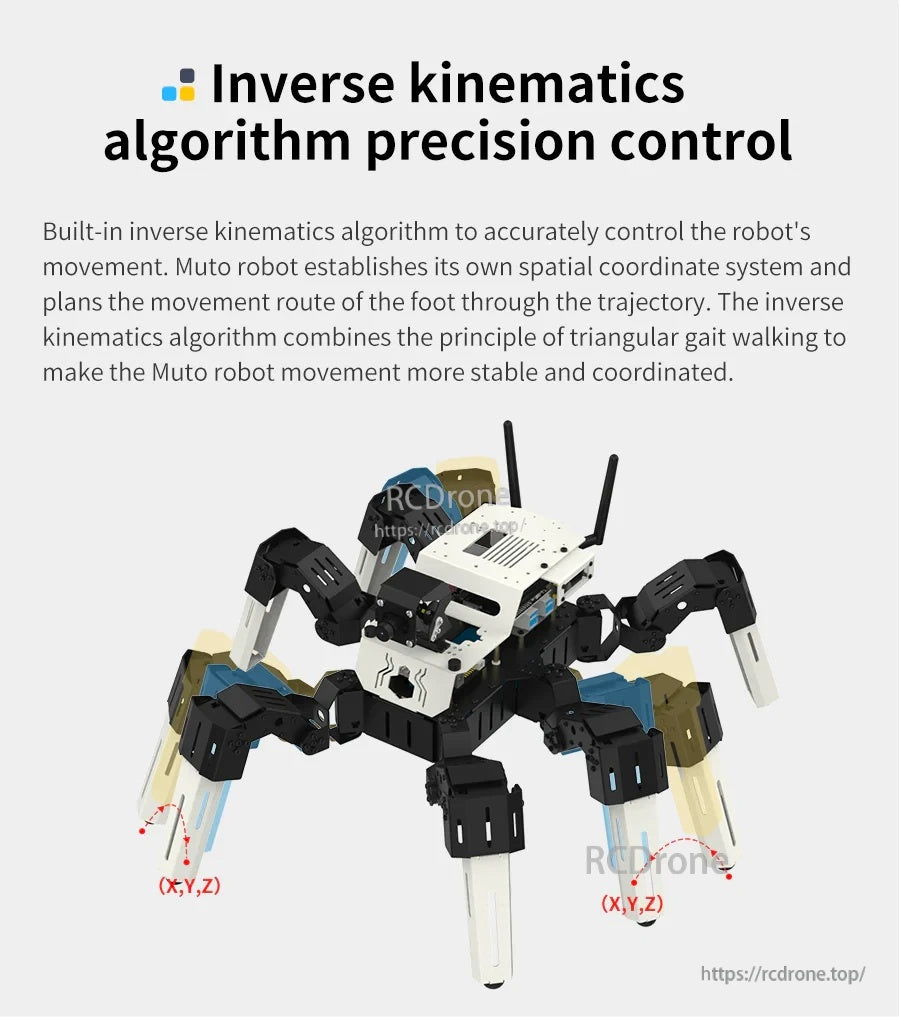
내장된 역기구학은 발 궤적을 조정하여 더 부드럽고 안정적인 시뮬레이션 걸음을 돕습니다.

실시간 FPV를 통해 로컬 네트워크 연결을 통해 휴대폰 앱에서 로봇을 운전하고 모니터링할 수 있습니다.

앱에서 동작 그룹을 저장하여 사전 설정된 움직임을 트리거하거나 개별 관절을 미세 조정하여 사용자 정의 포즈를 만들 수 있습니다.

상호작용하는 동작은 제스처 스타일의 인사 및 움직임 루틴과 같은 놀이 행동을 지원합니다.

반응형 움직임 데모는 근거리 장애물과 동적 움직임 동안 균형 조정을 강조합니다.

비전 기반 행동은 AI 상호작용 실험을 위한 추적 및 팔로우를 지원할 수 있습니다.

빠른 명령은 웅크리기 및 앞으로 이동과 같은 일반적인 동작 상태를 가능하게 합니다.
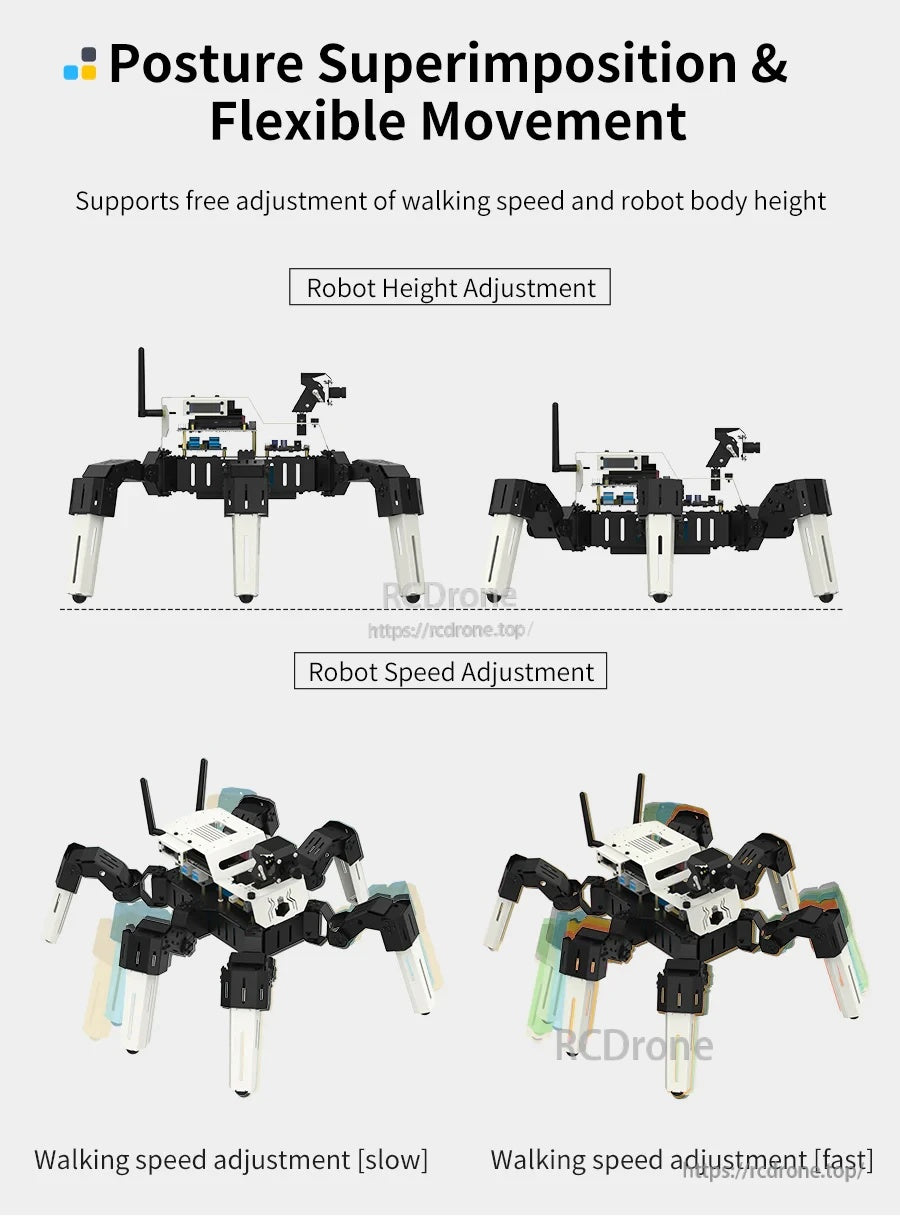
다양한 표면, 데모 및 실내 데스크탑 테스트에 맞춰 몸 높이와 걷기 속도를 조정하세요.

교육 모드는 한 로봇의 다리 움직임을 수동으로 안내하고 두 번째 유닛이 이를 반영하도록 합니다.

카메라 기반 AI 기능에는 OpenCV 워크플로우를 사용한 색상 추적, 얼굴 추적 및 QR 코드 인식이 포함됩니다.

객체 감지, 골격 기반 자세 추정 및 제스처 제어 루틴과 같은 심층 AI 데모를 탐색하세요.

Python에서 프로그램 동작을 설정하고 노트북에서 모션 제어, 비전 처리 및 자동화를 빠르게 반복합니다.
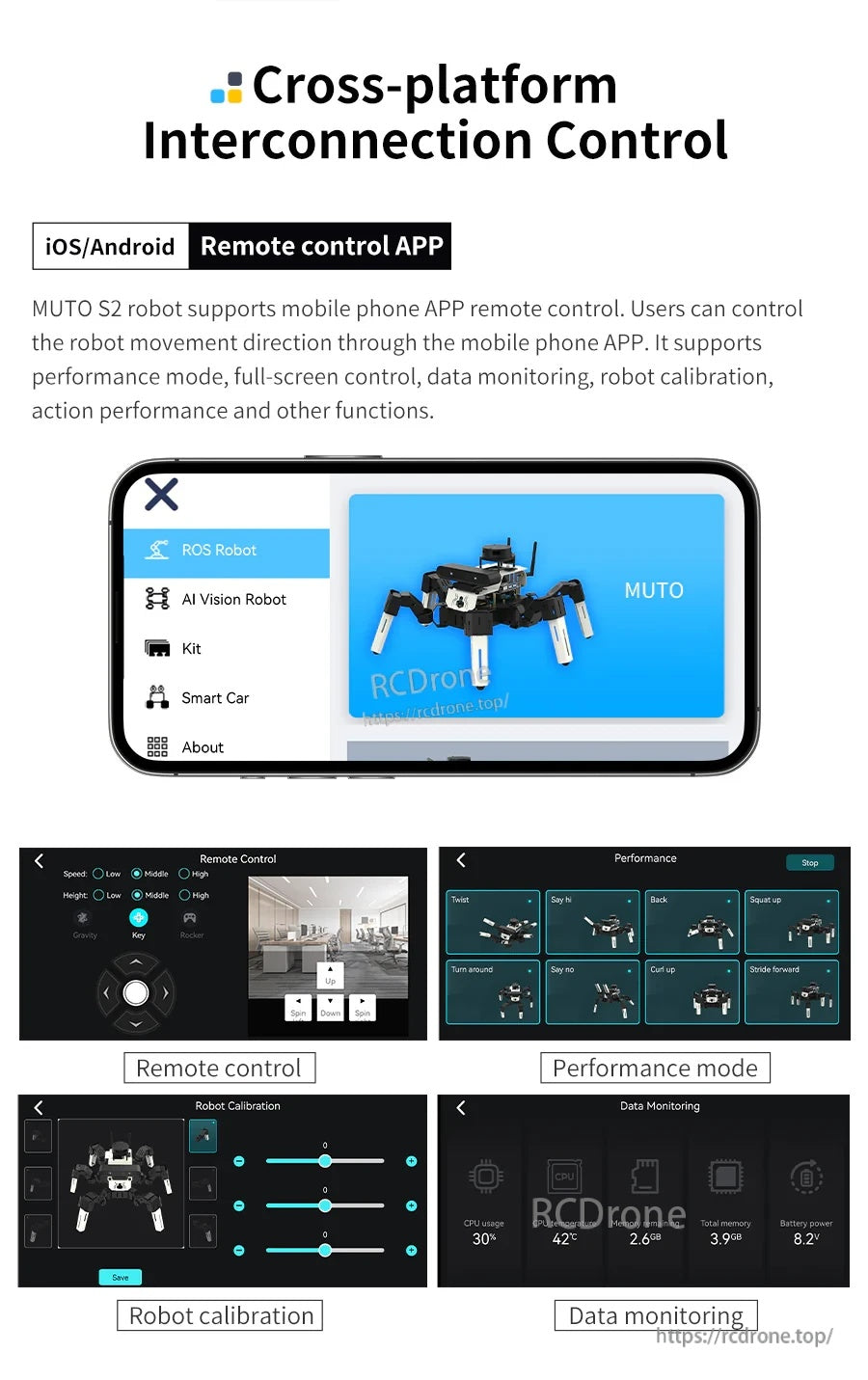
MUTO S2는 원격 제어, 로봇 보정, 성능 모드 및 데이터 모니터링을 위한 iOS/Android 크로스 플랫폼 앱을 지원합니다.

Muto S2는 JupyterLab 웹 페이지를 통한 PC 제어와 로봇 이동을 위한 2.4G/USB 무선 게임패드 제어를 지원합니다.
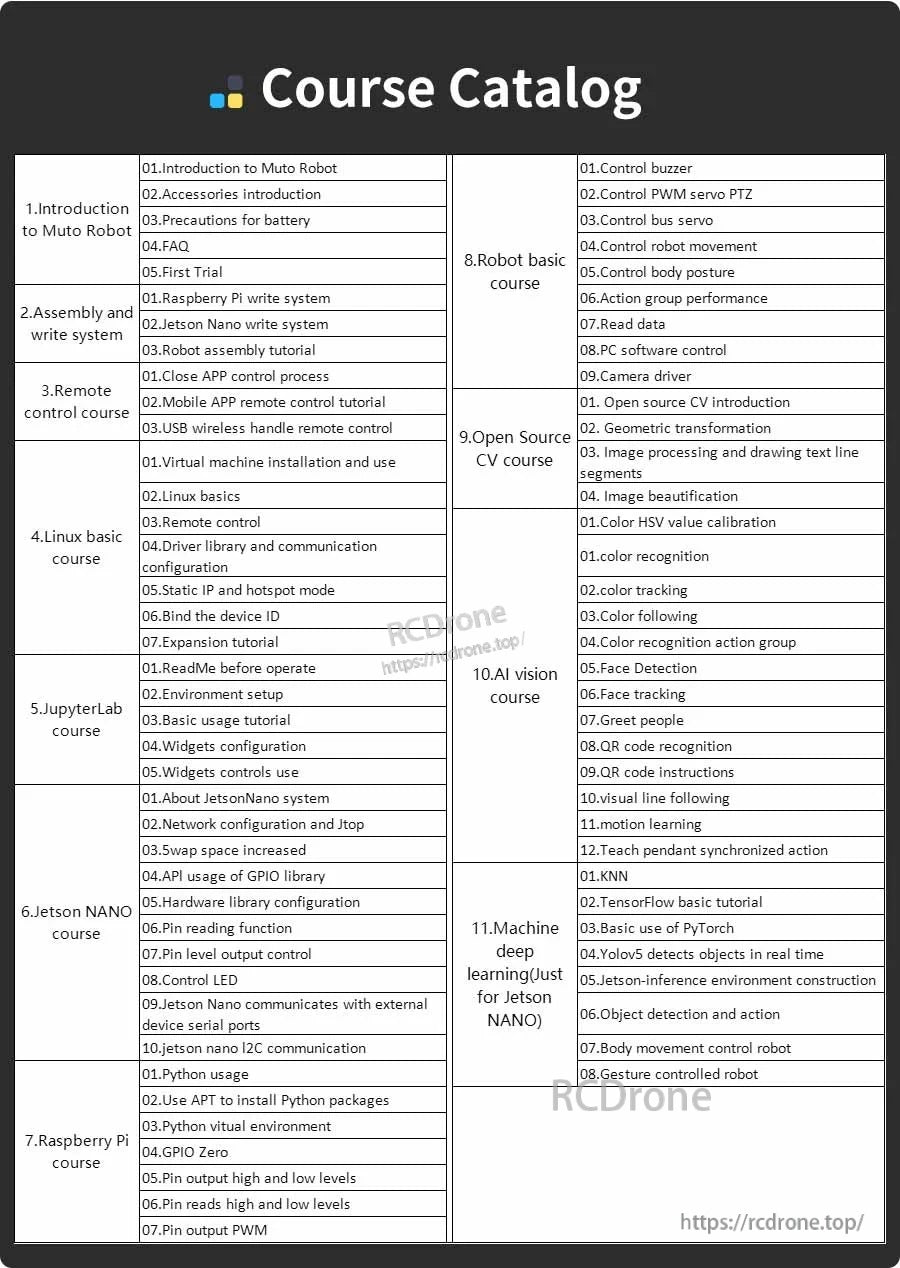
Yahboom Muto S2 강좌 카탈로그는 조립, 모션 제어, OpenCV 비전 기능 및 AI 실험을 위한 가이드 모듈을 설명합니다.
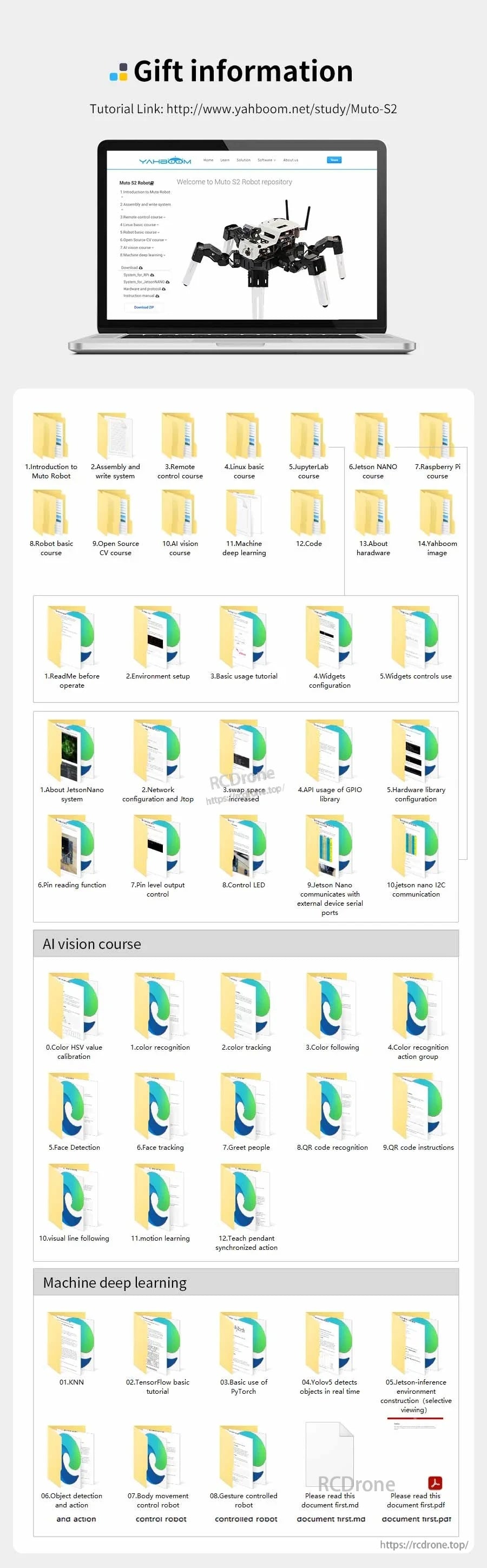
Yahboom Muto S2는 단계별 설정 및 코딩을 위한 AI 비전 및 딥러닝 강좌 파일과 함께 체계적인 학습 리소스를 포함합니다.
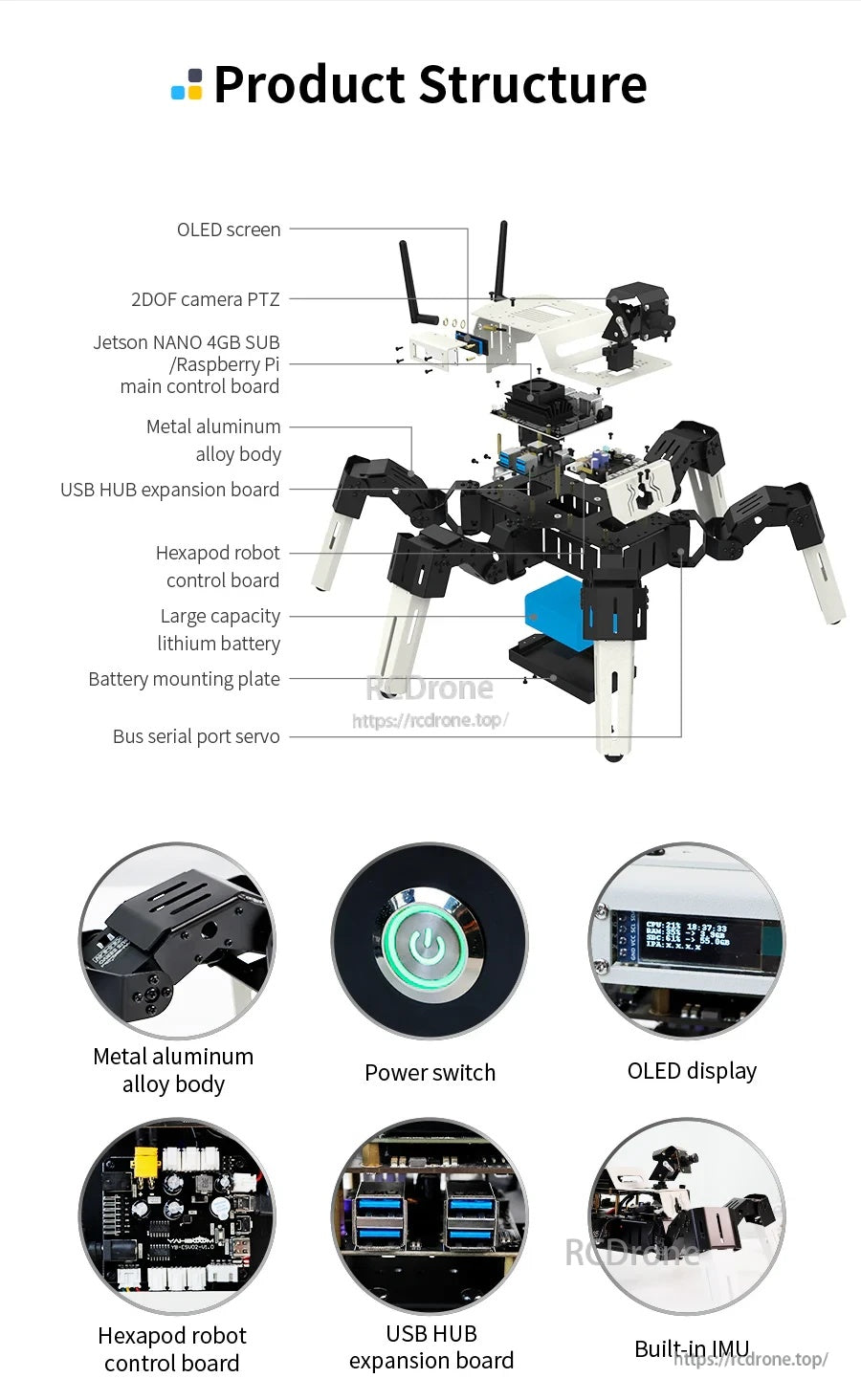
Muto S2 헥사포드 레이아웃에는 OLED 화면, 2DOF 카메라 PTZ 모듈, USB 허브 확장 보드 및 대형 리튬 배터리 마운트가 포함되어 있습니다.

Muto S2는 0–270° 관절 범위를 가진 지능형 직렬 버스 서보를 사용하며, 35kgf·cm 토크와 6.0–8.4V 작동을 포함한 사양이 나열되어 있습니다.
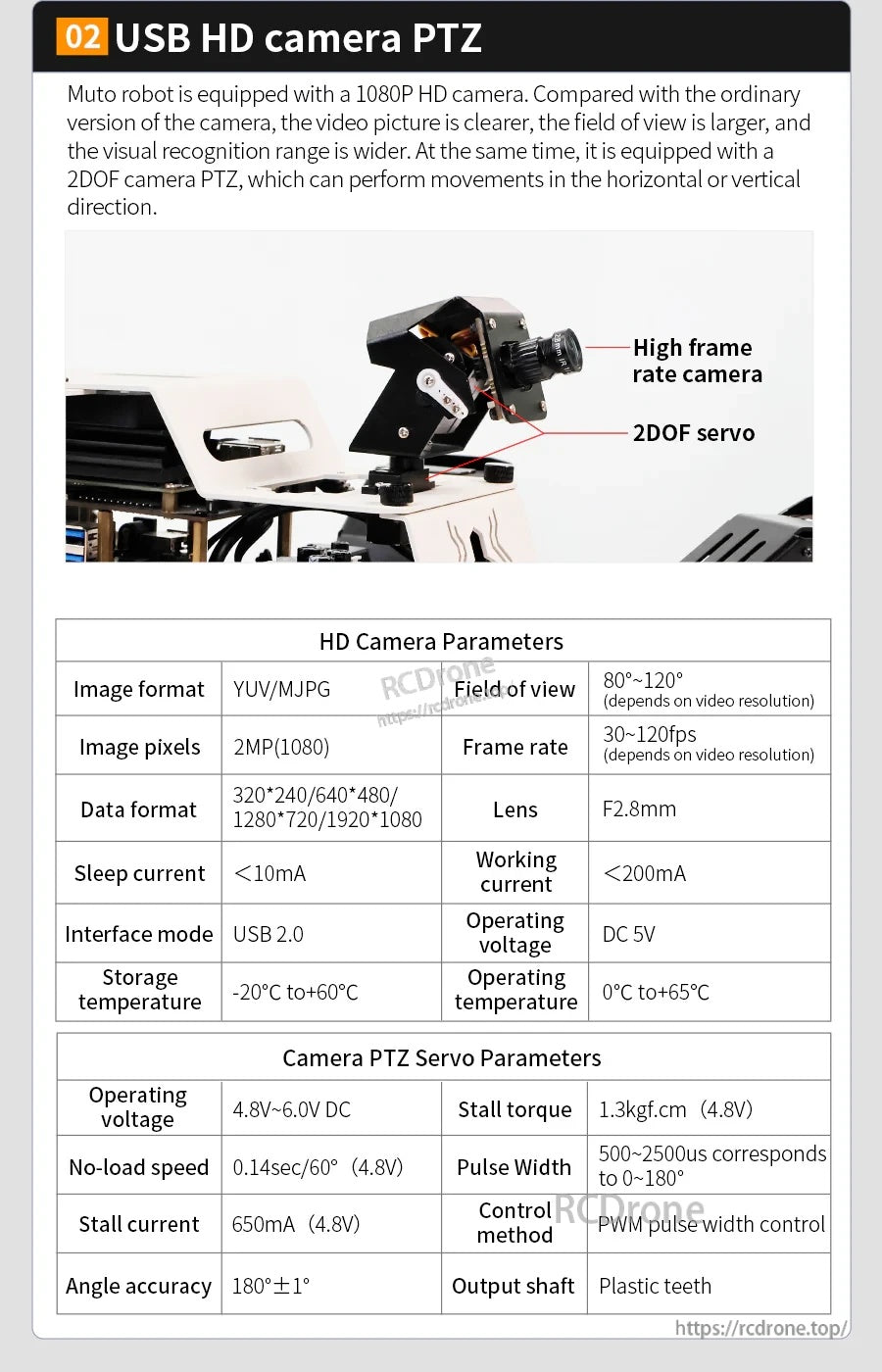
USB HD 1080P 카메라 PTZ는 팬/틸트 제어를 위한 2DOF 서보를 사용하며, USB 2.0을 통해 연결되고 최대 80–120° 시야각을 제공합니다.
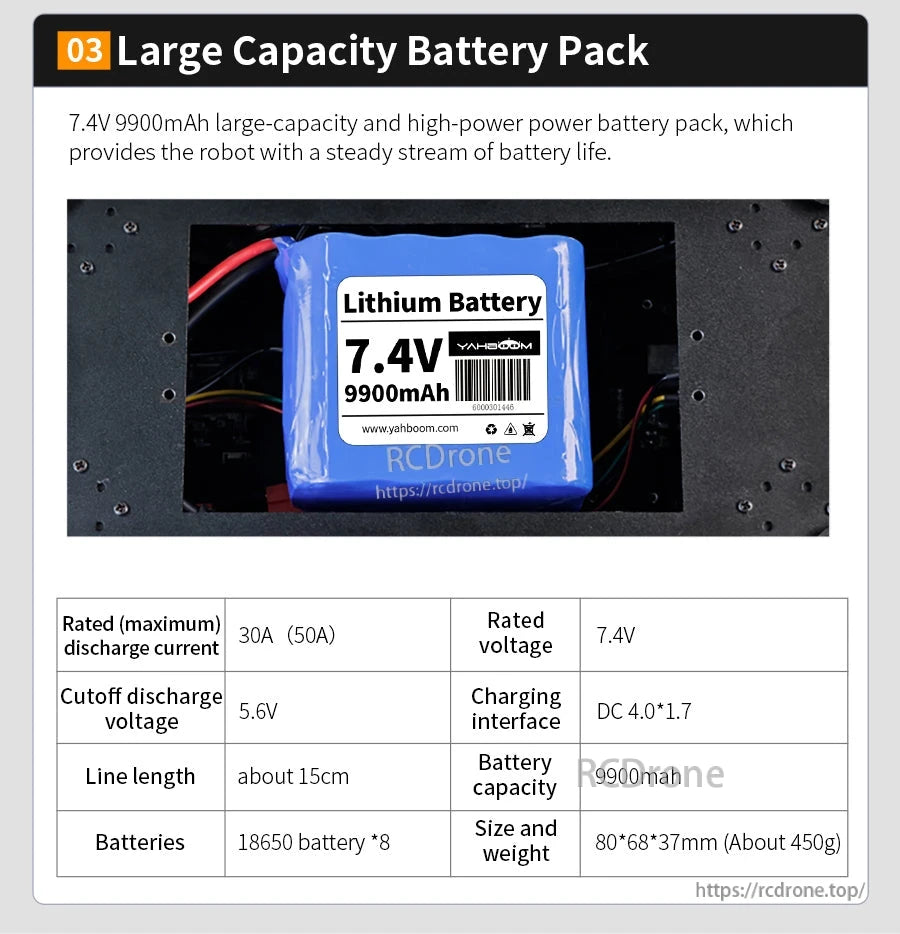
7.4V 9900mAh 리튬 배터리 팩은 DC 4.0×1.7 충전 인터페이스와 약 15cm 리드를 사용하여 쉽게 연결할 수 있습니다.
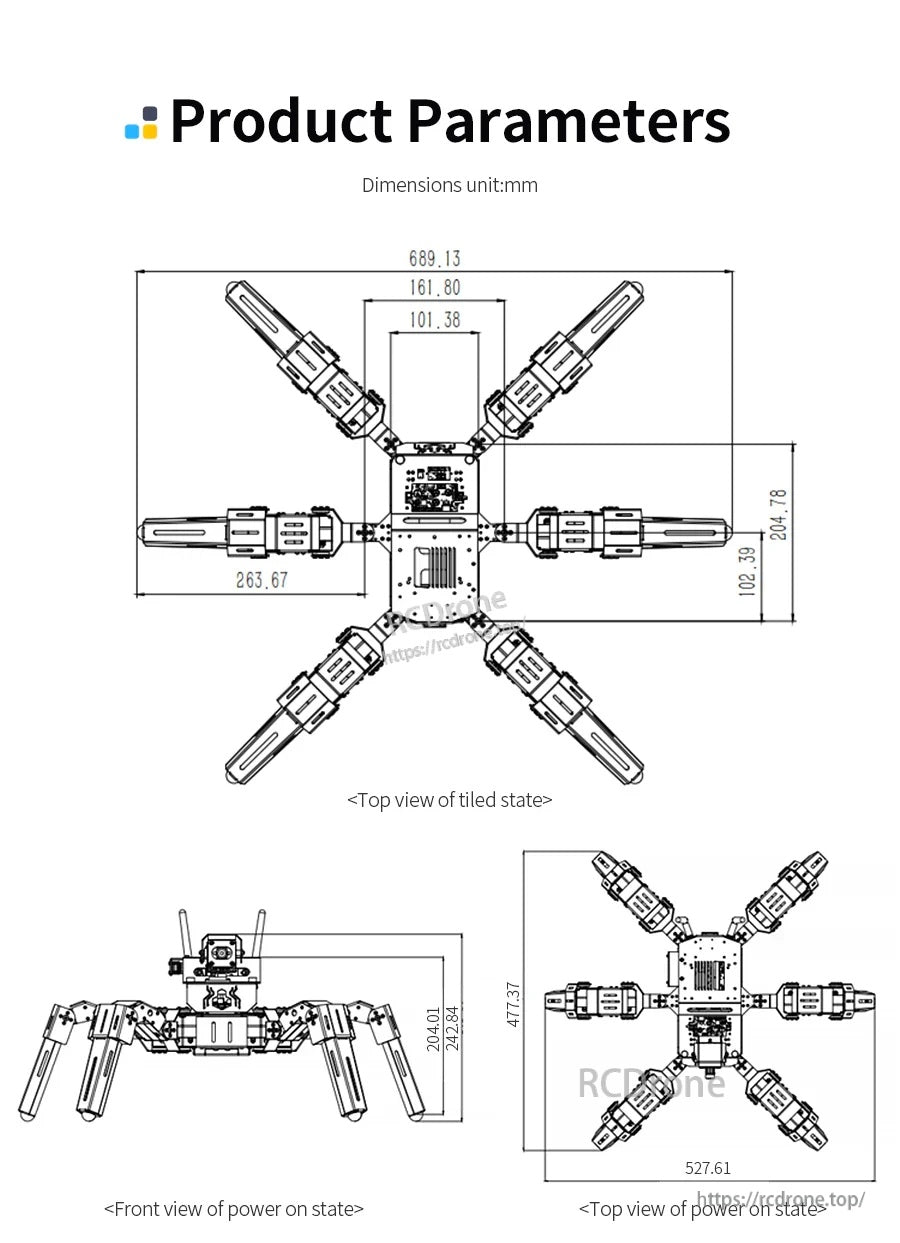
Yahboom Muto S2는 밀리미터 단위로 측정된 상단 및 전면 뷰를 보여주는 치수 레이아웃과 함께 제공되어 배치 및 간격 계획에 유용합니다.
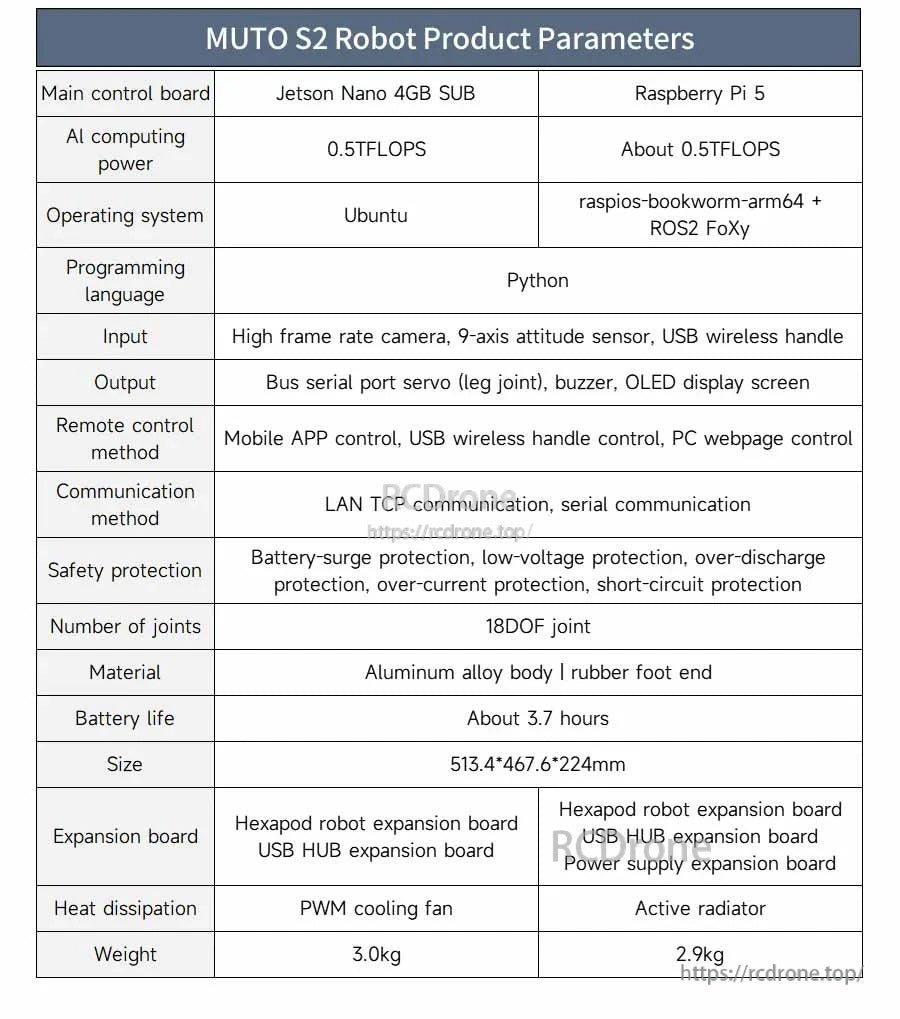
MUTO S2는 Jetson Nano 4GB USB 또는 Raspberry Pi 5 메인 제어 보드와 함께 제공되며, 둘 다 Python, 18DOF 관절 및 약 3.7시간의 배터리 수명을 지원합니다.
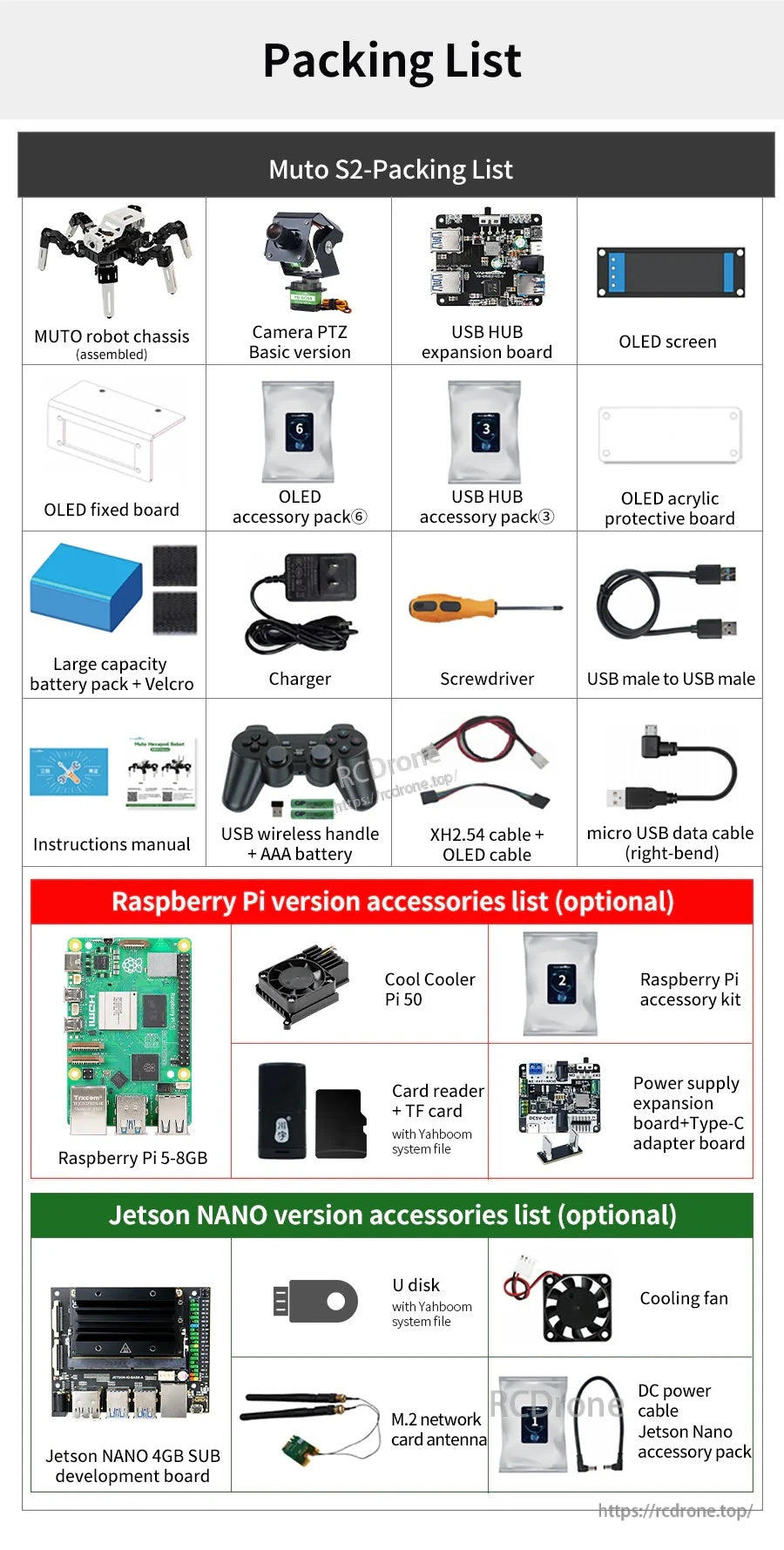
Muto S2 육각형 키트에는 로봇 섀시, PTZ 카메라 모듈, OLED 구성 요소, USB 허브 확장 보드, 배터리 팩, 충전기, 케이블 및 기본 도구가 포함되어 있으며, Raspberry Pi 또는 Jetson Nano 액세서리는 추가로 나열됩니다.











