YDLIDAR X3 Pro 라이다 센서, 8m 반경 TOF 거리 측정, ROS1/ROS2, UART, 360° 스캔, 4000회/초
YDLIDAR X3 Pro 라이다 센서, 8m 반경 TOF 거리 측정, ROS1/ROS2, UART, 360° 스캔, 4000회/초
Yahboom
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
YDLIDAR X3 Pro는 ROS 로봇 매핑 및 내비게이션을 위해 설계된 360° Lidar 센서입니다. 이 센서는 삼각법(레이저 삼각 측량) 거리 측정 기술과 표준 비동기 직렬 통신(UART)을 사용하여 대부분의 실내 사용 시나리오에 대해 8m 측정 반경을 제공합니다. 모듈에는 모터 속도 조절이 가능한 모터 드라이버가 포함되어 있으며 스캔 주파수의 자동 조정을 지원합니다.
주요 특징
- ROS1 및 ROS2 지원; ROS 시스템과 호환되며 SDK 및 기술 지원을 제공합니다.
- 샘플링 주파수: 4000회/초 (초당 4000 샘플).
- 스캔 주파수: 5Hz~10Hz 조정 가능 (모터 속도 조절을 통해 자동 조정 가능).
- 360° 전방향 레이저 스캔(거리 측정 코어가 시계 방향으로 회전).
- 주변 광 저항: 40Klux (실내/실외).
- Windows PC 소프트웨어 제공.
- 라즈베리 파이, RDK 시리즈, NVIDIA 제트슨 시리즈 보드 및 PC/IPC를 포함한 개발 플랫폼을 지원합니다.
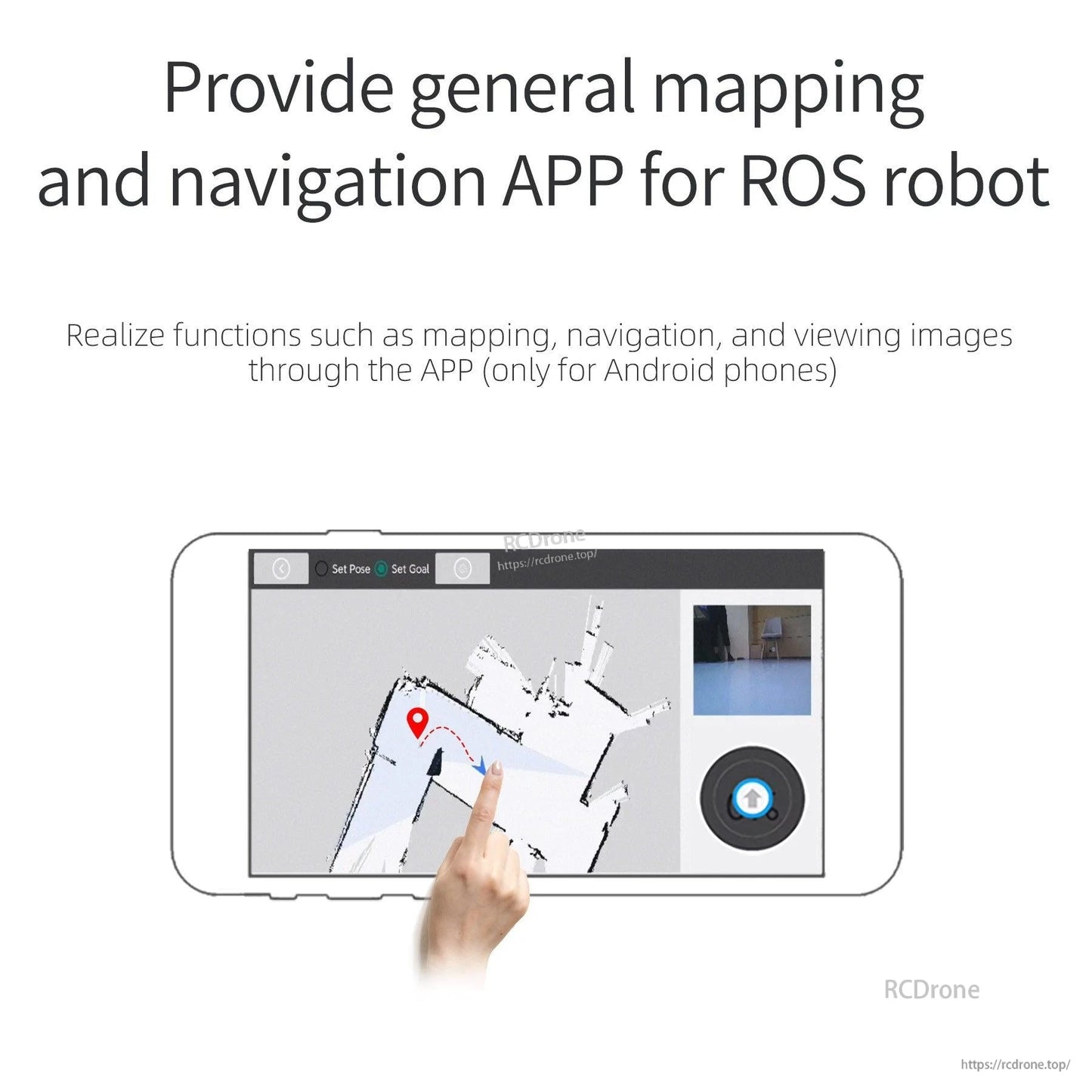
- 매핑, 내비게이션 및 앱을 통한 이미지 보기와 같은 기능을 갖춘 ROS 로봇을 위한 일반 매핑 및 내비게이션 앱을 제공합니다(안드로이드 폰 전용).
사양
| 모델 | YDLIDAR X3 Pro |
| 측정 반경 | 8m |
| 측정 범위 (최소) | 0.12m |
| 과도 범위 테스트 | 최대 14m 최대 16m |
| 각도 해상도 | 0.6° (5Hz) |
| 스캔 주파수 | 5Hz~10Hz 조정 가능 |
| 샘플링 주파수 | 4000회/초 |
| 주변 조도 | 40KLux (실외) |
| 스캔 각도 | 360° |
| 거리 측정 원리 | 삼각법 거리 측정 |
| 통신 인터페이스 | 표준 비동기 직렬 포트 (UART) |
| 전체 크기 | 95*68.9*40.5mm |
| 무게 | 135g |
| 직렬 포트 어댑터 보드 | 케이스 포함 |
| 윈도우 지원 | 윈도우 PC 소프트웨어 제공 |
| ROS 지원 | ROS1 및 ROS2 |
| 사각지대 측정 | 포인트 클라우드 인식 정상 |
| 6m 정확도 측정 | 포인트 클라우드에서 낮은 지터 진폭 |
응용 프로그램
- 모바일 로봇을 위한 실내 매핑 및 내비게이션
- ROS 시각화 및 SLAM 워크플로우 (rviz, 매핑 및 내비게이션)
- 장애물 회피 및 동기화 위치/내비게이션 프로젝트
- ROS 교육용 로봇 및 오픈 소스 하드웨어 개발
- UAV 매핑 및 장애물 회피 (거리 측정 센서로서)
소프트웨어 & 튜토리얼
- ROS1/ROS2 관련 튜토리얼 자료 (라이다 테스트 및 매핑 테스트 방법 포함)
- ROS 환경에서 빠른 설정을 위한 미리 구성된 실행 파일
- 매핑/내비게이션 및 이미지 뷰잉을 위한 오픈 소스 코드와 안드로이드 전용 앱
- 윈도우 PC 소프트웨어
제품 선택 도움이나 애프터 서비스 지원을 원하시면 [email protected] or에 문의하시고 https://rcdrone.top/ . 를 방문하세요.
노트
- 블라인드 영역 감지 및 정밀 감지 대상 물체는 80% 반사율을 가진 흰색 배플입니다.
- 반경 감지 대상 물체는 92% 반사율을 가진 흰색 벽입니다.
세부사항

YDLIDAR X3 Pro Lidar 센서는 ROS 매핑 및 내비게이션을 위한 360° 스캐닝을 제공하며, 5–10Hz 회전을 조정할 수 있습니다.
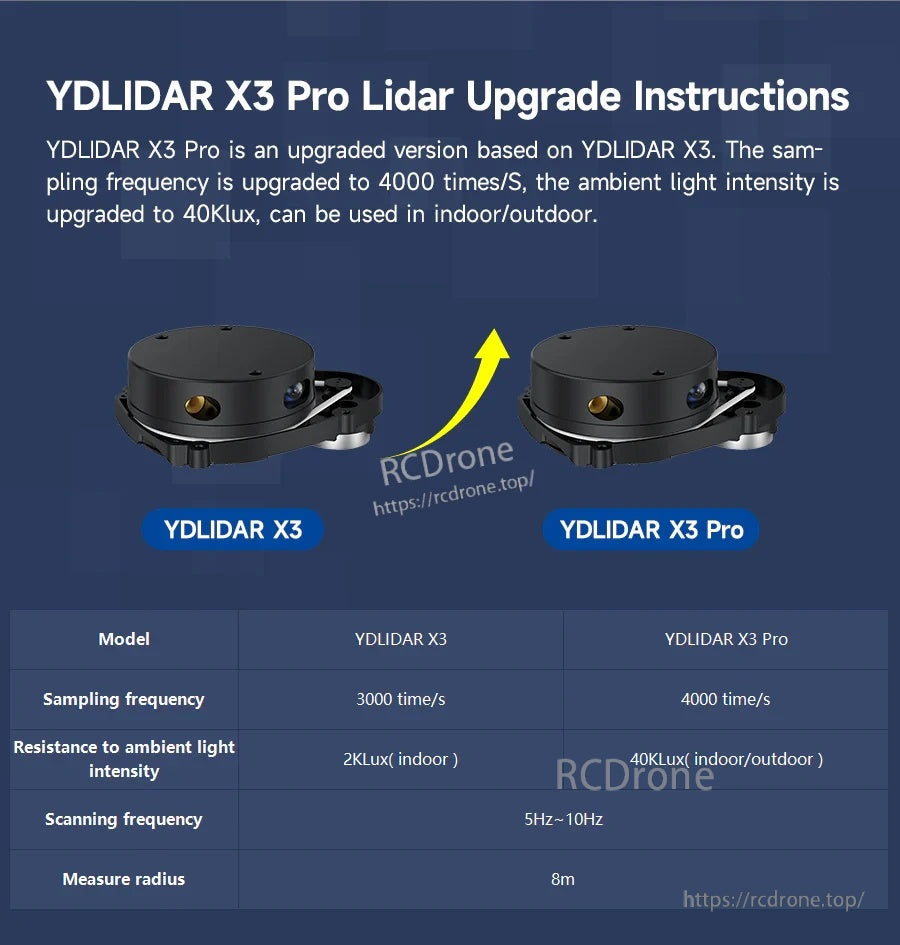
YDLIDAR X3와 비교할 때, Pro 버전은 샘플링을 4000배/s로 증가시키고 주변 광 저항을 40Klux로 개선합니다.
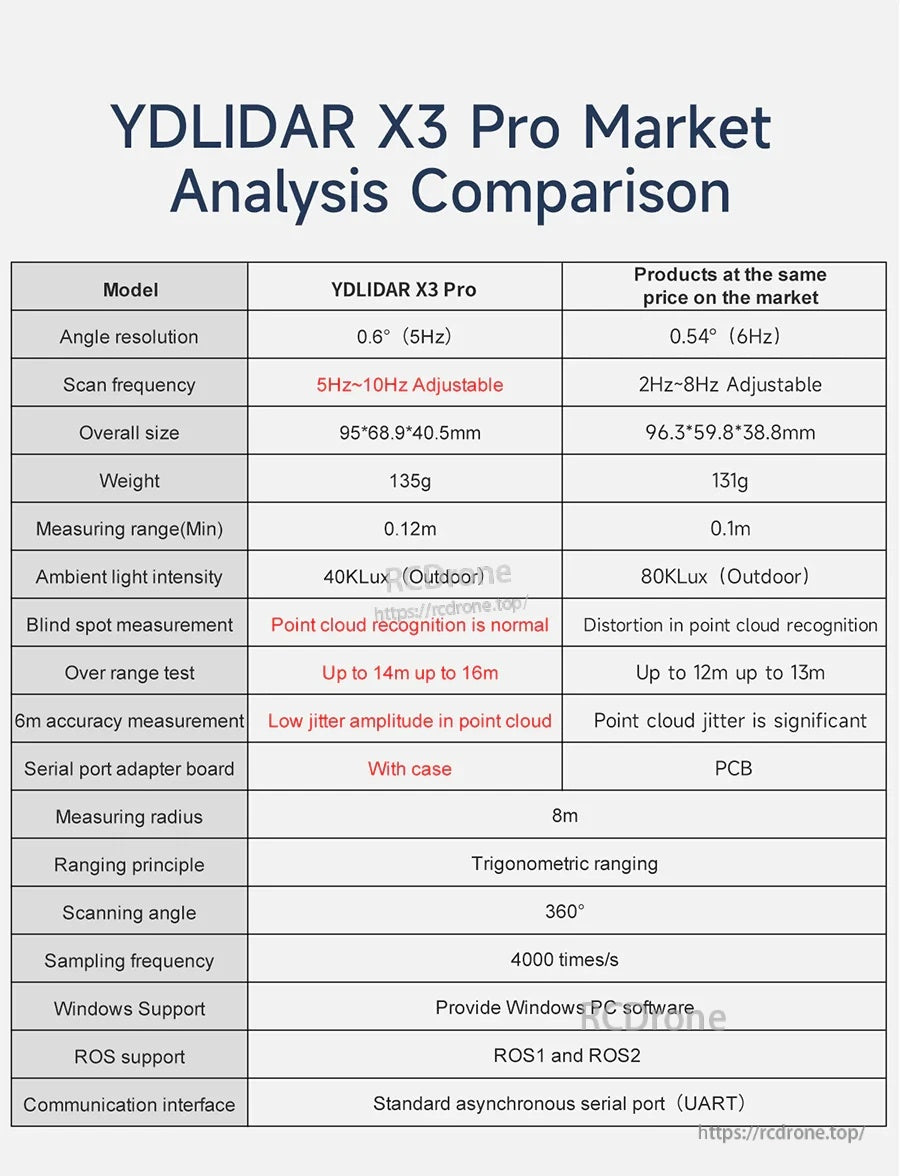
사양 중심의 비교는 각도 해상도, 측정 반경 및 ROS/UART 호환성과 같은 X3 Pro 매개변수를 강조합니다.
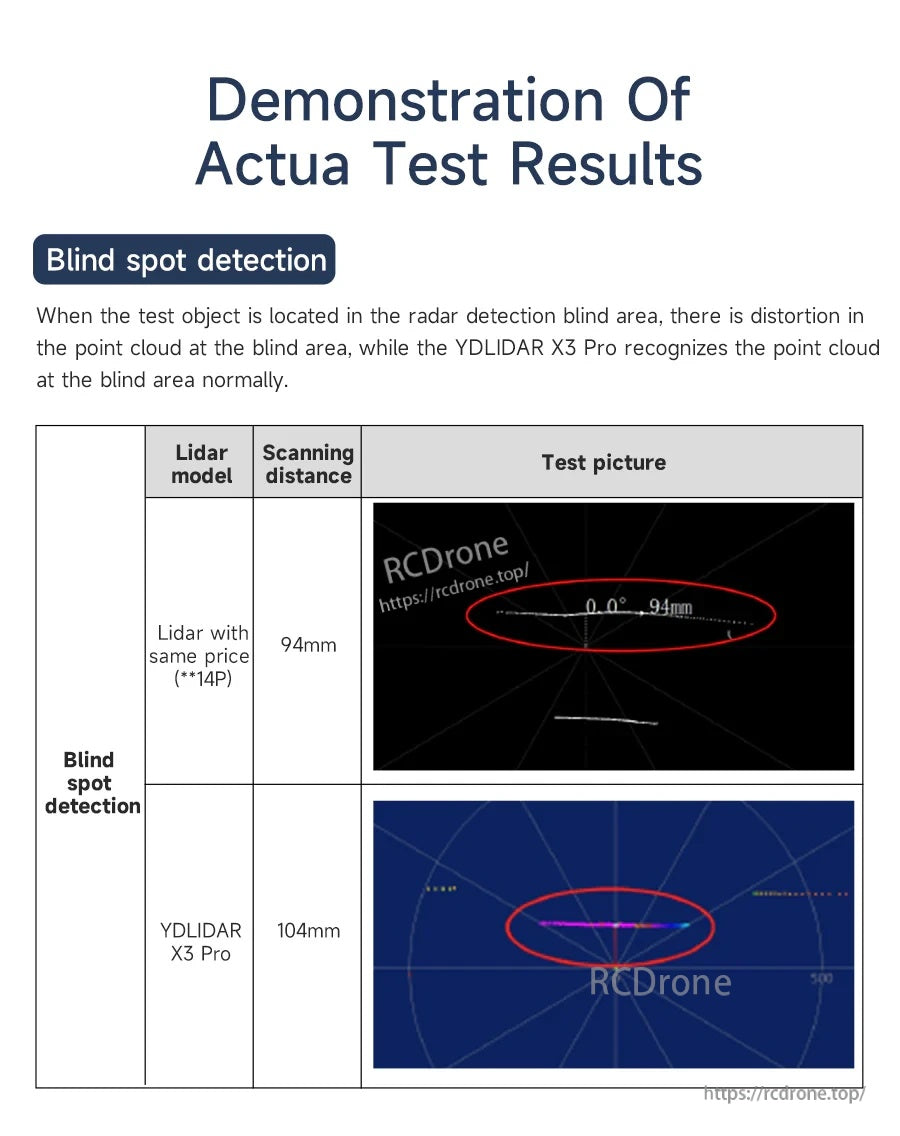
블라인드 스팟 테스트는 신뢰할 수 있는 실내 SLAM 작업을 위해 가까운 거리에서 더 깨끗한 포인트 클라우드 인식을 강조합니다.
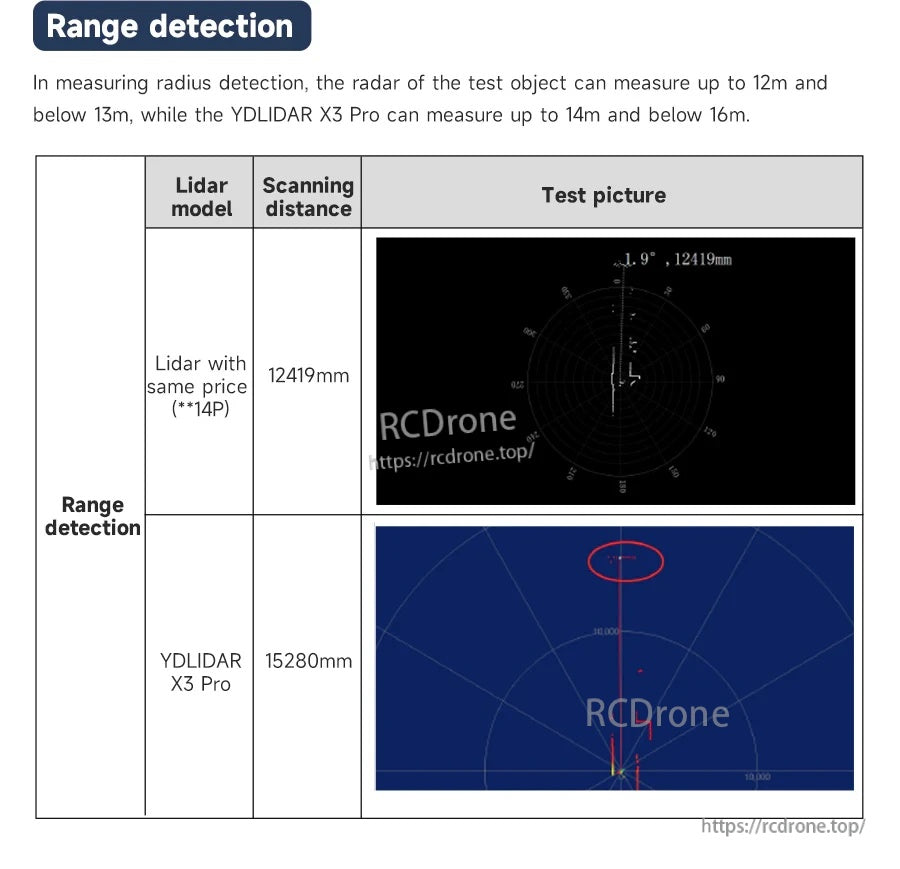
범위 감지 결과는 제어된 테스트에서 확장된 장거리 반사를 보여줍니다.
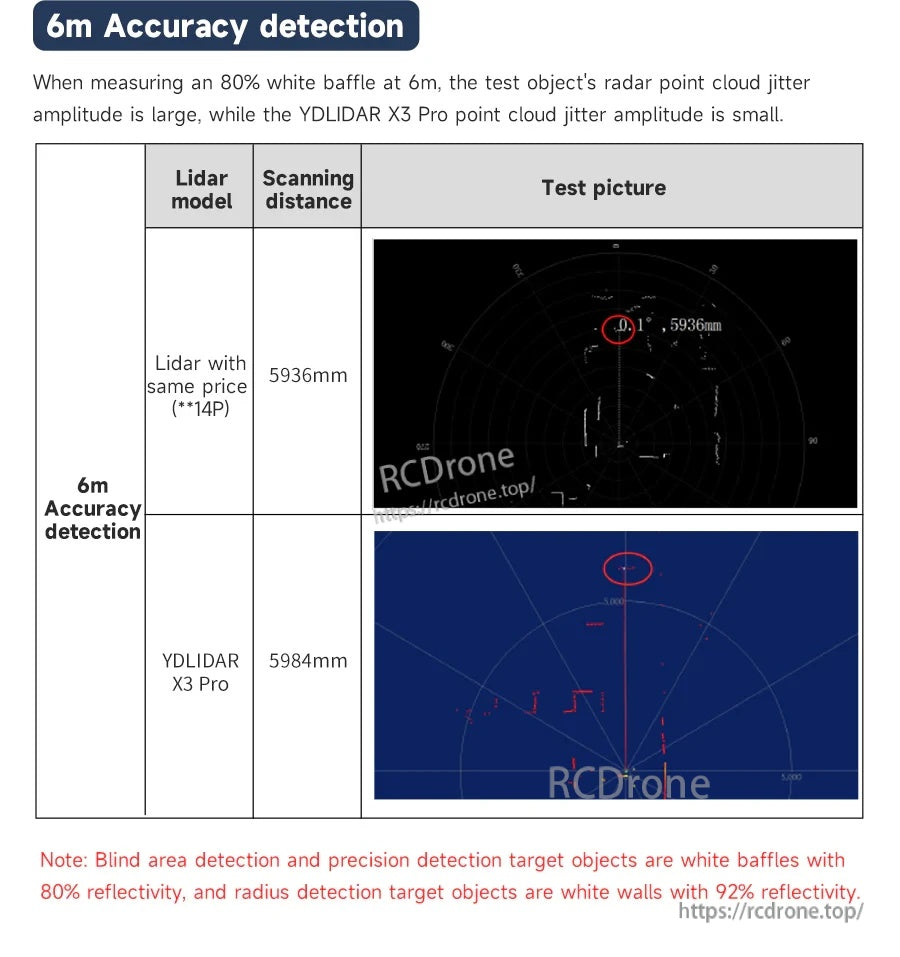
6m에서 낮은 포인트 클라우드 지터는 내비게이션 및 장애물 회피 중에 지도를 안정적으로 유지하는 데 도움을 줍니다.

레이저 삼각 측량을 사용하여 거리를 측정하고 환경의 2D 윤곽 지도를 작성합니다.
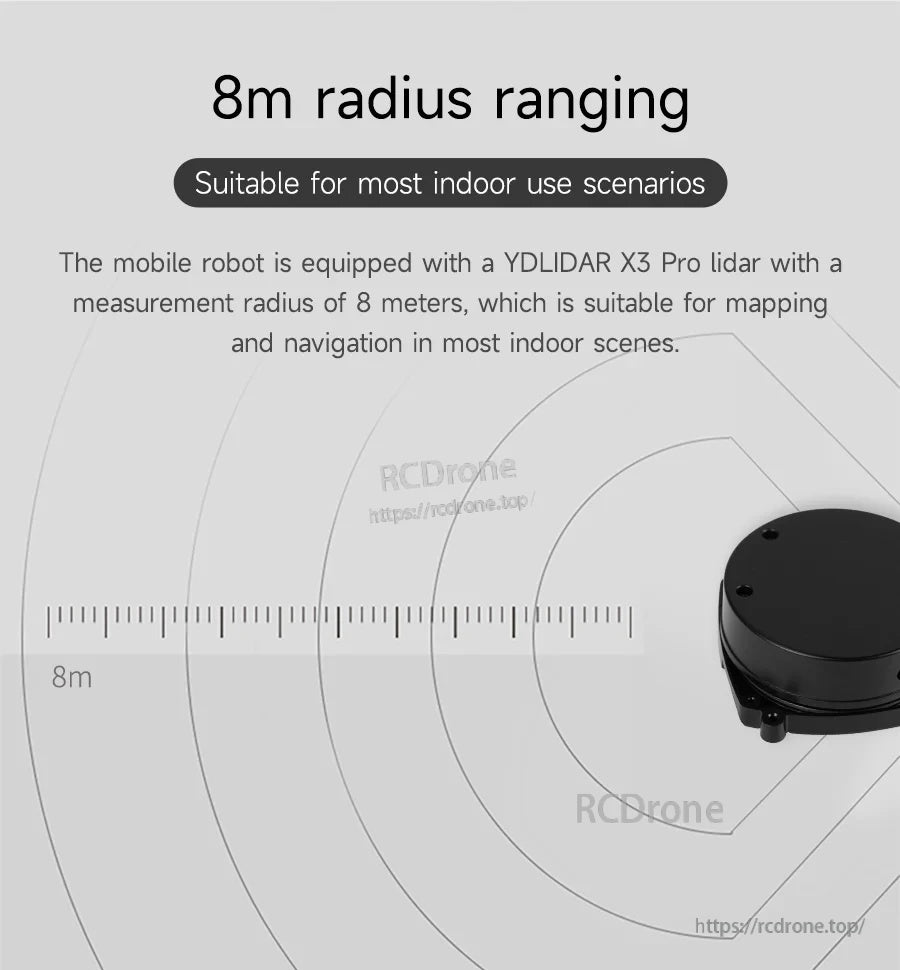
8m 측정 반경은 대부분의 실내 매핑 및 내비게이션 배치에 적합합니다.

스캔 주파수는 내장된 모터 속도 조절 기능으로 5Hz에서 10Hz로 조정할 수 있습니다.

초당 4000 샘플 속도는 반응성 매핑 데이터 캡처를 지원합니다.

전체 360° 전방향 스캔은 내비게이션 및 윤곽 매핑을 위한 주변 탐지를 도와줍니다.

ROS1 및 ROS2 호환성이 SDK 접근 및 통합을 위한 기술 지원과 함께 제공됩니다.

Raspberry Pi, NVIDIA Jetson, RDK 시리즈 보드 및 PC/IPC를 포함한 일반 로봇 플랫폼과 호환됩니다.
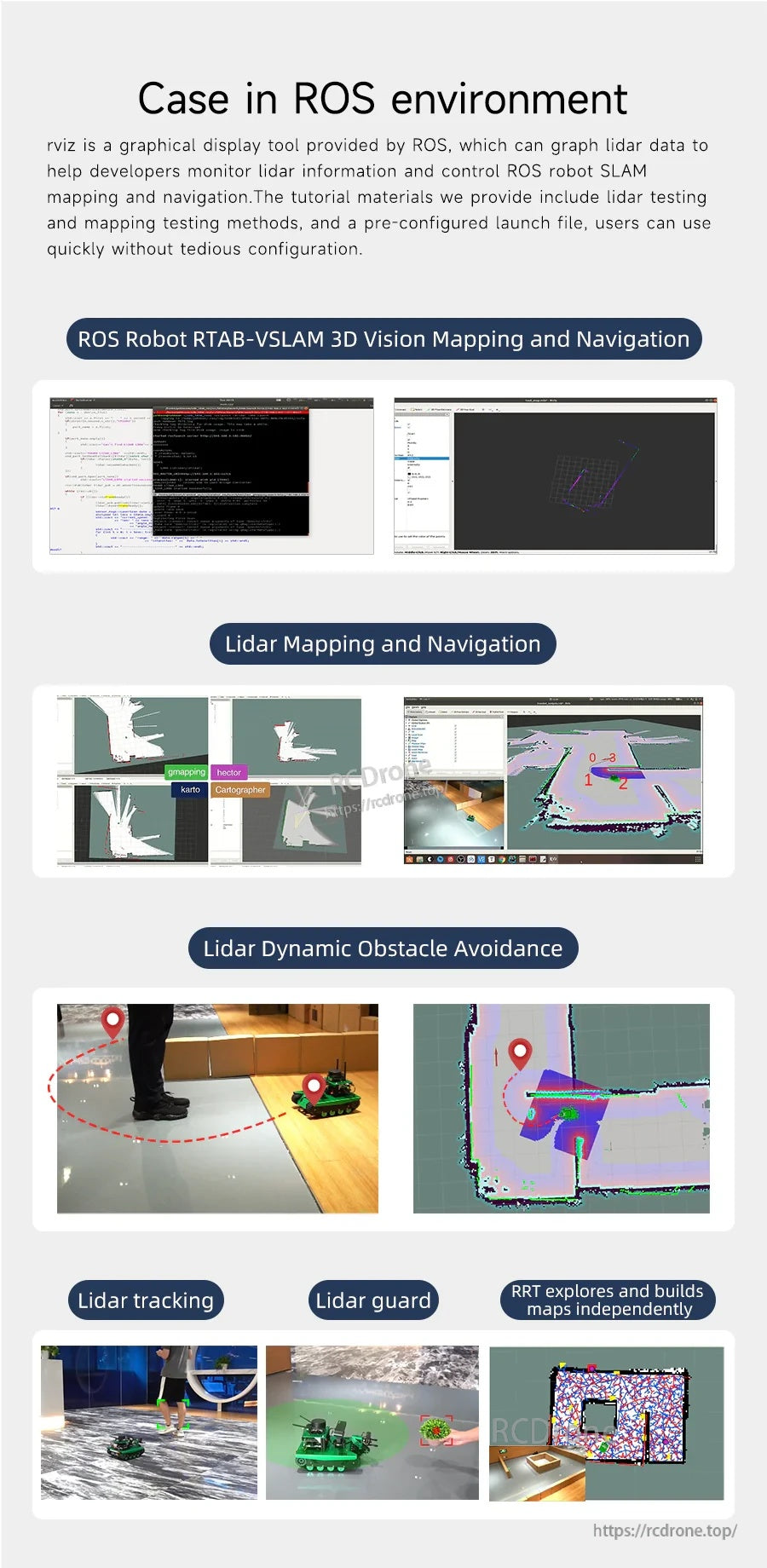
전형적인 ROS 워크플로우에는 rviz 시각화, 매핑/내비게이션 스택 및 동적 장애물 회피가 포함됩니다.
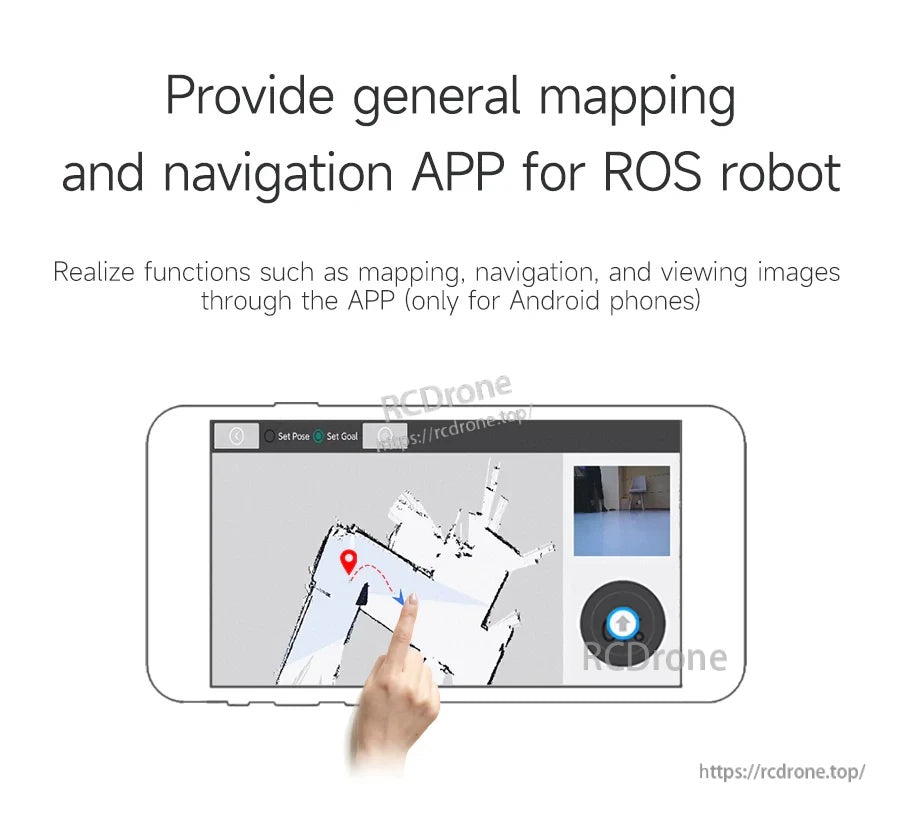
일반 매핑, 내비게이션 및 ROS 로봇에서 이미지 보기용으로 Android 전용 앱이 제공됩니다.
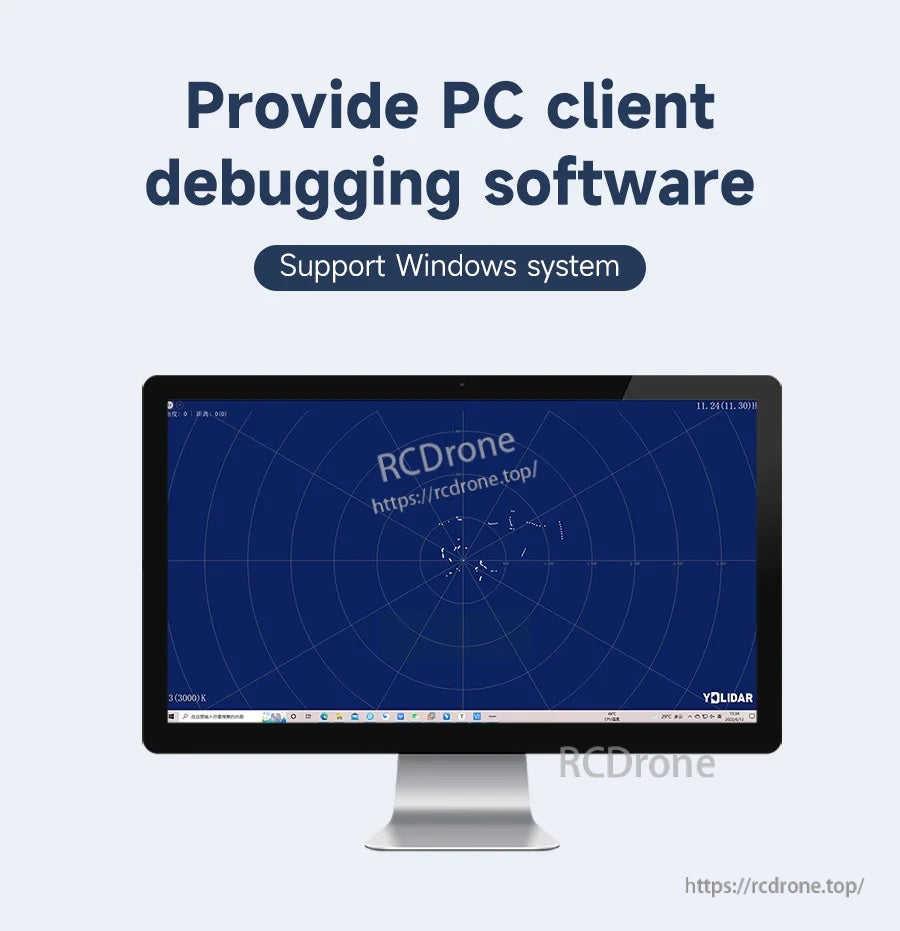
디버깅, 시각화 및 기본 라이다 테스트를 위한 Windows PC 소프트웨어가 제공됩니다.

교육용 로봇, 오픈 소스 로봇 프로젝트, UAV 거리 측정 및 환경 스캔 작업에 적합합니다.

USB 연결을 통해 빠른 플러그 앤 플레이 설정이 가능하며, 컴팩트한 본체는 공간이 제한된 로봇 빌드에 적합합니다.
YDLIDAR X3 Pro는 FDA 1등급 레이저 안전 기준을 충족하는 외부 포인트 펄스 레이저를 사용합니다.
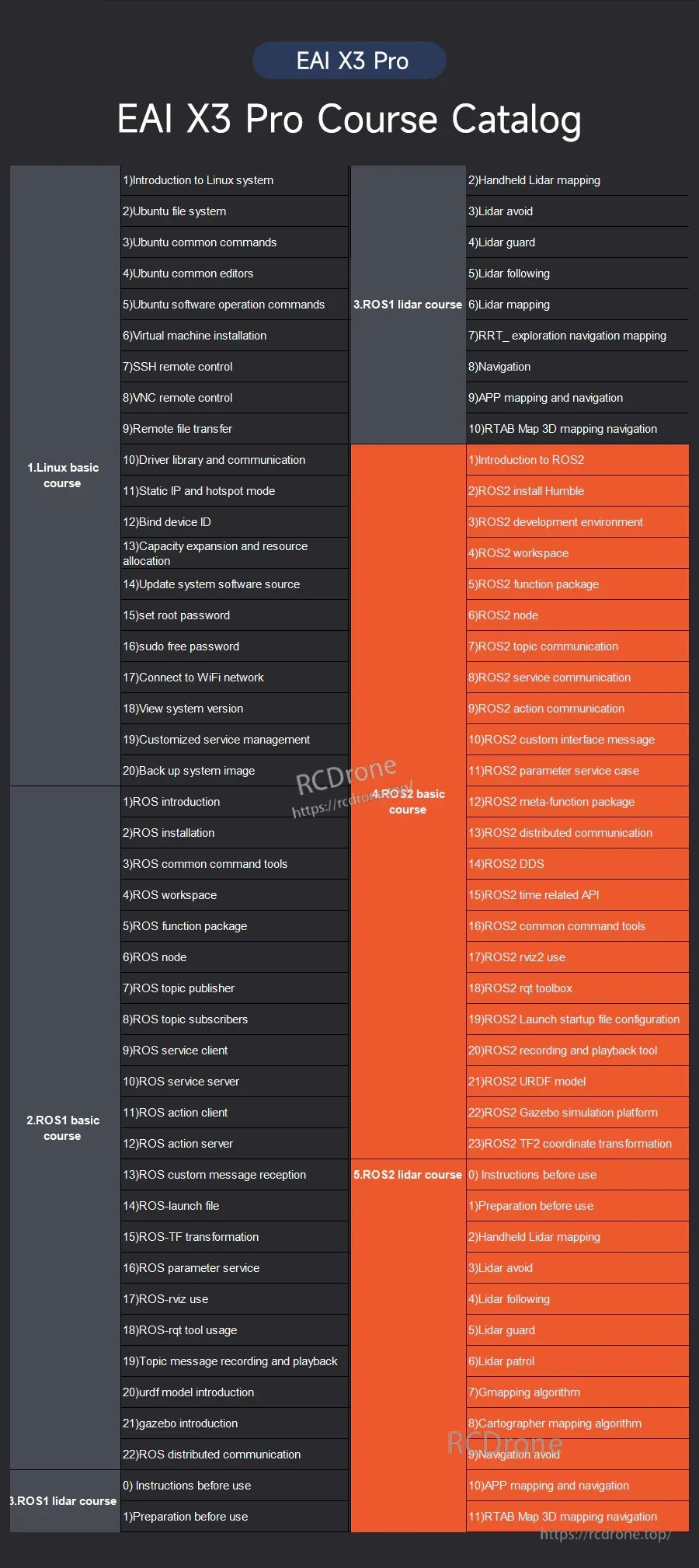
EAI X3 Pro 과정 카탈로그는 매핑, SLAM, 내비게이션 및 ROS2 개발을 위한 학습 모듈을 설명합니다.

YDLIDAR X3 Pro 키트에는 라이다 센서, 직렬 포트 어댑터 보드, 시스템에 연결하기 위한 Type-C 및 추가 케이블이 포함되어 있습니다.
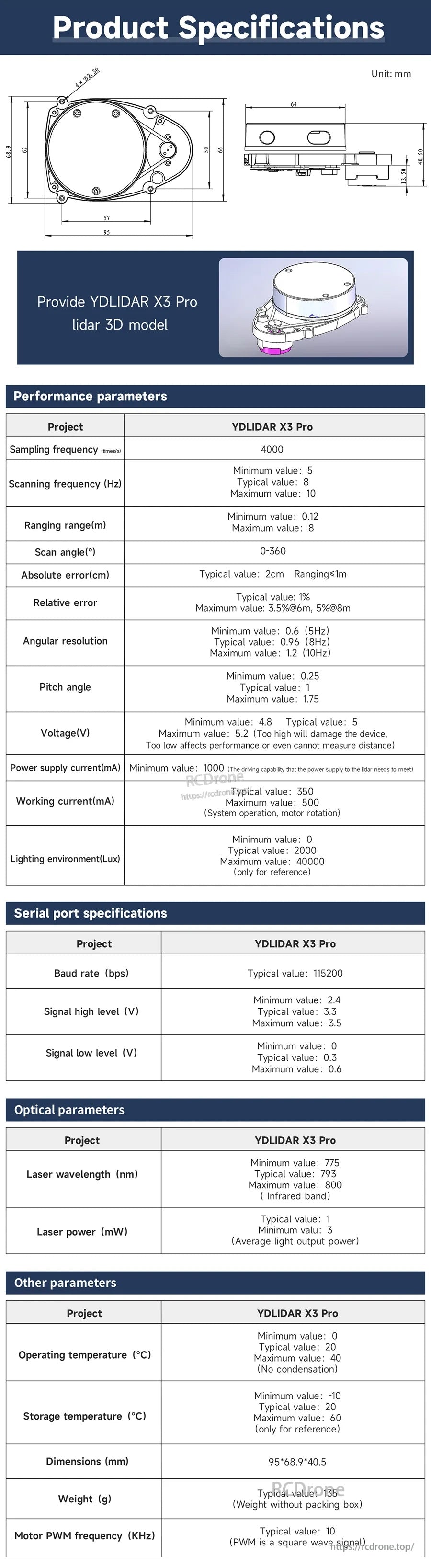
YDLIDAR X3 Pro 사양 및 기계 도면은 로봇 설정에 통합하고 장착 공간을 계획하는 데 도움이 됩니다.