






ZeroOne X6 Pro 오토파일럿 비행 컨트롤러 FMU v6X STM32H753, 트리플 IMU, 100M 이더넷, PWM 3.3V/5V
ZeroOne X6 Pro 오토파일럿 비행 컨트롤러 FMU v6X STM32H753, 트리플 IMU, 100M 이더넷, PWM 3.3V/5V
ZeroOne
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
제로원 X6 Pro는 오픈 소스 FMU v6X 아키텍처(픽스호크 커넥터 표준 DS-009)를 기반으로 한 자율 비행 컨트롤러로, 고진동 환경을 위해 설계되었으며 ArduPilot 및 PX4 펌웨어를 지원합니다. 산업용 등급 센서를 통합하고, 내장된 충격 흡수 기능, 삼중 IMU 중복성, IMU 온도 보상, 확장된 연결성을 위한 100 Mbit 이더넷 인터페이스를 제공합니다.
주요 특징
- FMU v6X 오픈 소스 하드웨어 표준 (Pixhawk 커넥터 표준 DS-009 호환성 표시됨)
- 프로세서: STM32H753; 통합 암호화/해시 프로세서 (명시된 대로); 주파수 증가 480MHz; 2M FLASH; 1M RAM
- 산업용 등급 센서 높은 진동 저항, 낮은 소음 및 낮은 온도 드리프트 (명시된 대로)
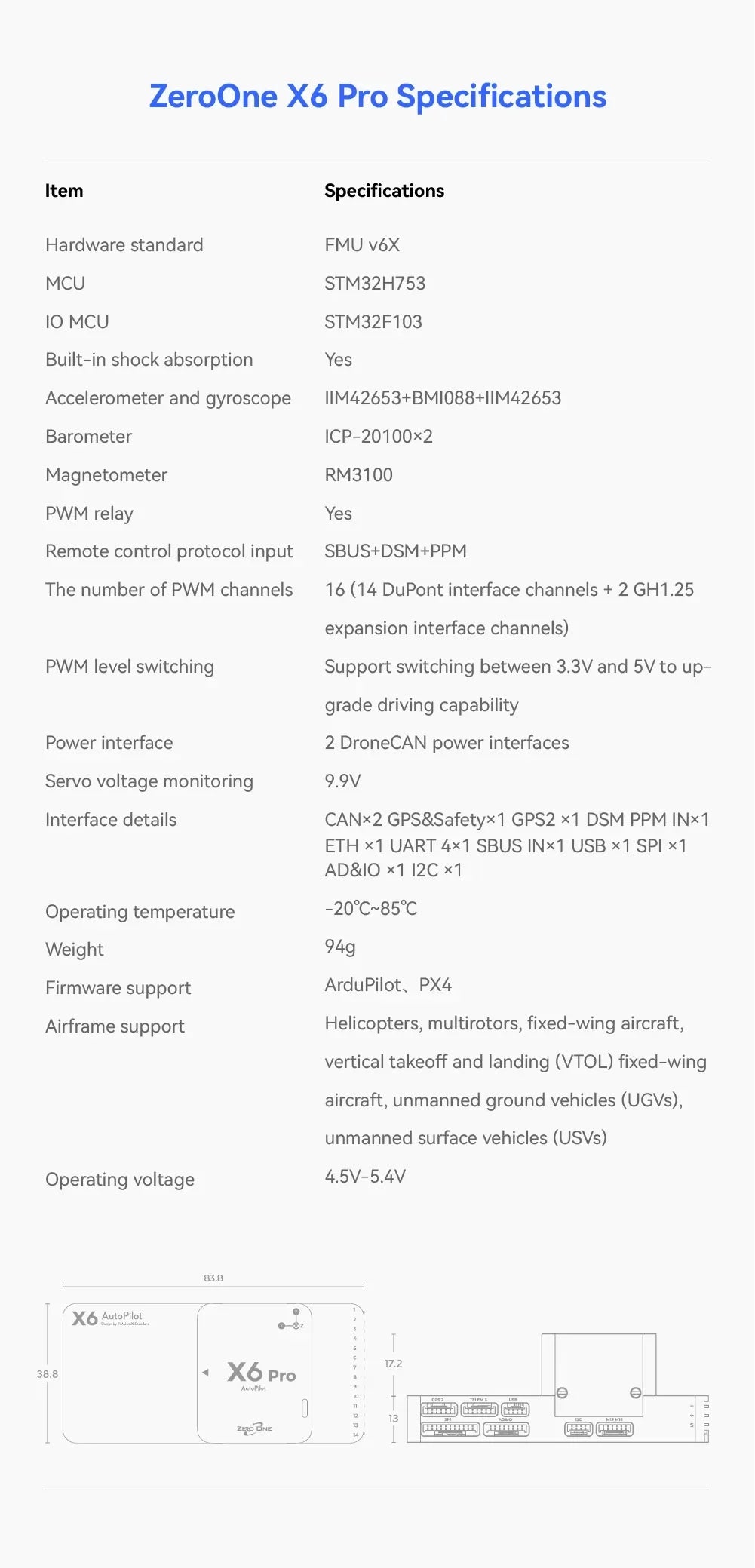
- 삼중 IMU 중복 및 다중 센서 중복 아키텍처 (명시된 대로)
- IMU 온도 보상 (가열 전력 증가 100%, 명시된 대로)
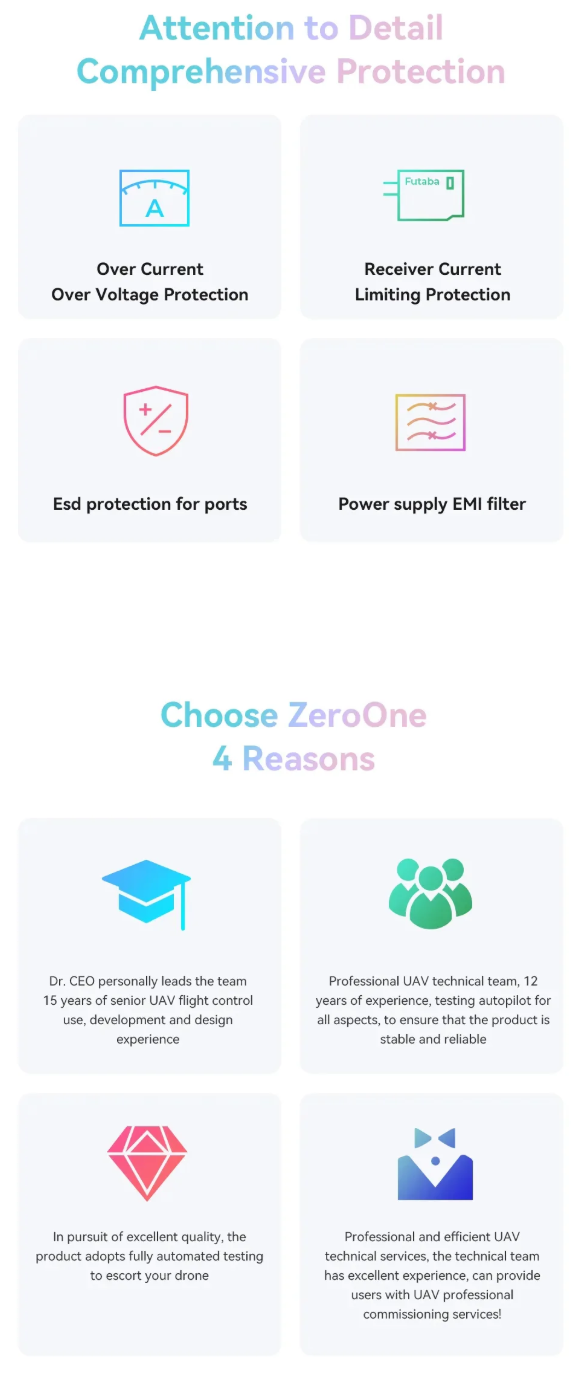
- PWM 구동 능력 3.3V/5V PWM 레벨/전압 스위칭 지원
- 보호 기능: 과전류/과전압 보호; 수신기 전류 제한 보호; 포트에 대한 ESD 보호; 전원 공급 EMI 필터
- 100 Mbit 이더넷 인터페이스 (ETH x1) 외부 컴퓨팅/주변 장치 연결을 위한 (예시 플랫폼으로는 Raspberry Pi 및 Nvidia Jetson 시리즈 개발 키트가 포함됨)
- DroneCAN 전원 인터페이스를 통한 지원 (2개의 DroneCAN 전원 인터페이스 나열됨)
사양
| 하드웨어 표준 | FMU v6X |
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| CPU 주파수 (명시된 대로) | 480MHz |
| 메모리 (명시된 대로) | 1M RAM |
| 플래시 (명시된 대로) | 2M FLASH | 내장형 충격 흡수 | 예 |
| 가속도계 및 자이로스코프 (사양 시트) | IIM42653 + BMI088 + IIM42653 |
| 자료에 언급된 자이로스코프 | ICM45686 (기능 텍스트에 언급됨); IIM42653 (ArduPilot 코드 노트 및 사양 시트에 언급됨) |
| 기압계 | ICP-20100 x2 |
| 자력계 | RM3100 |
| PWM 릴레이 | 예 |
| 원격 제어 프로토콜 입력 | SBUS + DSM + PPM |
| PWM 채널 수 | 16 (14 DuPont 인터페이스 채널 + 2 GH1.25 확장 인터페이스 채널) |
| PWM 레벨 스위칭 | 드라이빙 능력을 업그레이드하기 위해 3.3V와 5V 간 전환 지원 |
| 전원 인터페이스 | 2 DroneCAN 전원 인터페이스 |
| 서보 전압 모니터링 | 9.9V |
| 인터페이스 세부사항 | CAN x2; GPS&안전 x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| 작동 온도 | -20°C~85°C |
| 작동 전압 | 4.5V~5.4V |
| 무게 | 94g |
| 펌웨어 지원 | ArduPilot, PX4 |
| 프레임 지원 | 헬리콥터; 다중 로터; 고정익 항공기; 수직 이착륙 및 착륙(VTOL) 고정익 항공기; 무인 지상 차량(UGV); 무인 수상 차량(USV) |
| 외형 치수 (표시된 대로) | 83.8 mm; 38.8 mm; 17.2 mm; 13 mm |
산업용 등급 센서 (차트 값 표시됨)
| 자이로스코프 | ||
| 범위 (°/s) (클수록 좋음) | X6 Pro 센서: 4000 | ADIS16470: 2000; ICM20649: 4000; ICM20689: 2000 |
| RMS 노이즈 (°/s/sqrt(Hz)) (작을수록 좋음) | X6 Pro 센서: 0.005 | ADIS16470: 0.008; ICM20649: 0.0175; ICM20689: 0.006 |
| 교차 감도 (%) (클수록 좋음) | X6 Pro 센서: 1.25 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| 감도 온도 드리프트 (°/s/°C) (작을수록 좋음) | X6 Pro 센서: 0.005 | ADIS16470: 0.25; ICM20649: 2; ICM20689: 1.5 |
| 가속도계 | ||
| 범위 (g) (클수록 좋음) | X6 Pro 센서: 32 | ADIS16470: 40; ICM20649: 30; ICM20689: 16 |
| RMS 노이즈 (mg) (작을수록 좋음) | X6 Pro 센서: 0.7 | ADIS16470: 2.3; ICM20649: 2.85; ICM20689: 1.5 |
| 교차 감도 (%) (작을수록 좋음) | X6 Pro 센서: 1 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| 감도 온도 드리프트 (%/°C) (작을수록 좋음) | X6 Pro 센서: 0.005 | ADIS16470: 0.002; ICM20649: 0.026; ICM20689: 1 |
응용 프로그램
- 헬리콥터
- 멀티콥터
- 고정익 항공기
- VTOL 고정익 항공기
- UGV
- USV
매뉴얼
고객 서비스: [email protected] (또는 https://rcdrone.top/를 방문하십시오).
세부정보
ZeroOne X6 Pro 비행 컨트롤러는 산업용 등급 센서, 높은 정밀도, 낮은 소음 및 강력한 PWM 구동 능력을 갖추고 있습니다. 대형 화물 항공기를 위해 설계되었으며, Pixhawk 호환성을 갖춘 오픈 소스 FMU v6X 아키텍처를 사용합니다.
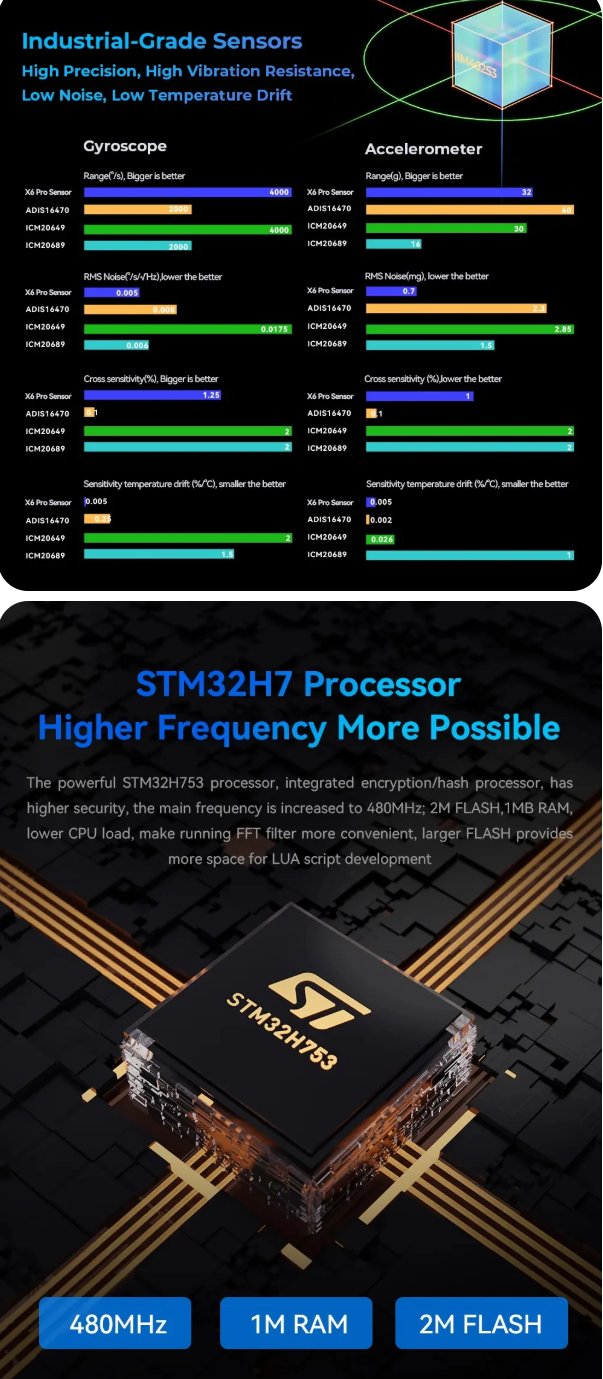
ZeroOne X6 Pro는 높은 정밀도, 낮은 소음 및 진동 저항성을 갖춘 산업용 등급 센서를 사용합니다.480MHz STM32H753 프로세서에서 작동하며 1MB RAM, 2MB FLASH, 향상된 보안, FFT 필터링 및 LUA 스크립팅 지원을 제공합니다.
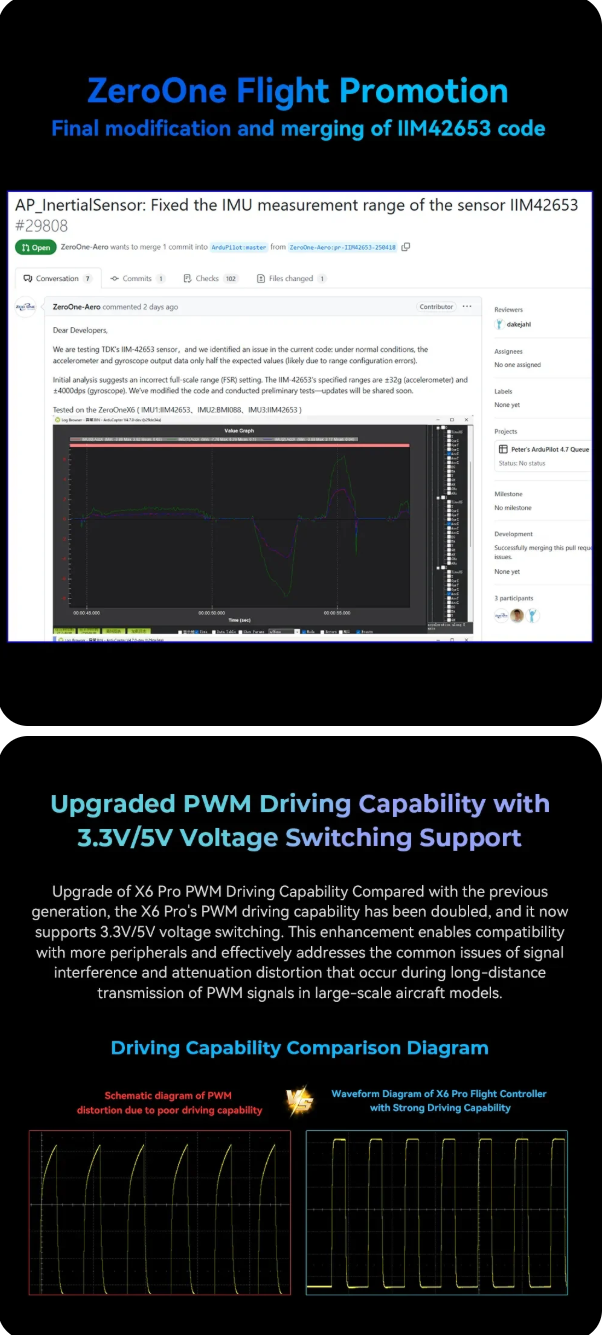
ZeroOne X6 Pro는 3.3V/5V 스위칭으로 PWM 구동을 향상시켜 신호 왜곡을 줄이는 이중 기능을 제공합니다. IIM42653의 IMU 센서 범위 수정으로 정확한 측정을 보장하여 비행 안정성과 주변 장치 호환성을 개선합니다.
ZeroOne X6 Pro는 과전류, 과전압, ESD 및 EMI 필터링을 포함한 포괄적인 보호 기능을 제공합니다. 15년 이상의 UAV 전문 지식을 바탕으로 전문 팀이 신뢰성, 자동화된 테스트 및 효율적인 기술 지원을 제공하여 최적의 드론 성능을 보장합니다.

ZeroOne X6 Pro는 안정성을 위한 충격 흡수 스폰지를 갖추고 있으며, 진동과 소음을 줄이고 Raspberry Pi 또는 Jetson 통합을 통해 SLAM, 시각 추적 및 고급 드론 기능을 위한 100M 이더넷 인터페이스를 포함합니다.
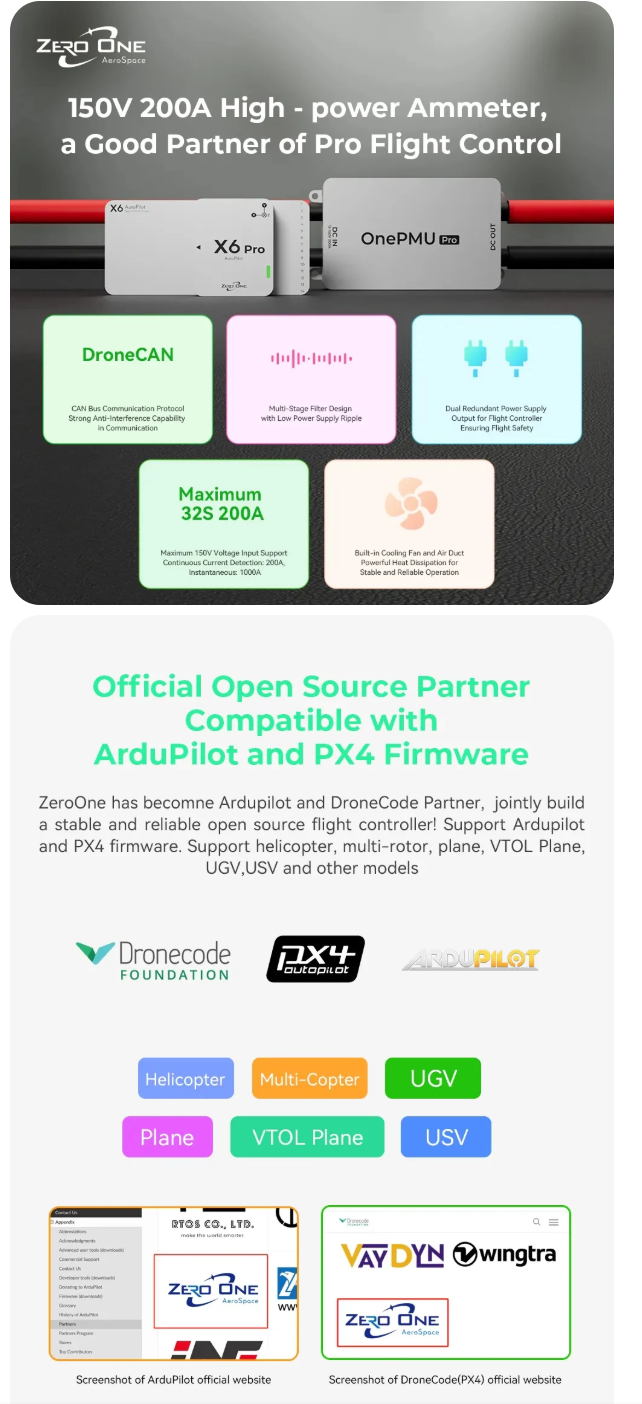
ZeroOne X6 Pro는 150V 200A를 지원하며 ArduPilot 및 PX4와 호환됩니다.드론CAN, 이중 전원 공급 장치, 냉각 팬을 갖추고 있으며, 전문 비행 제어를 위해 헬리콥터, 멀티콥터, 비행기, VTOL, UGV, USV 모델에 적합합니다.
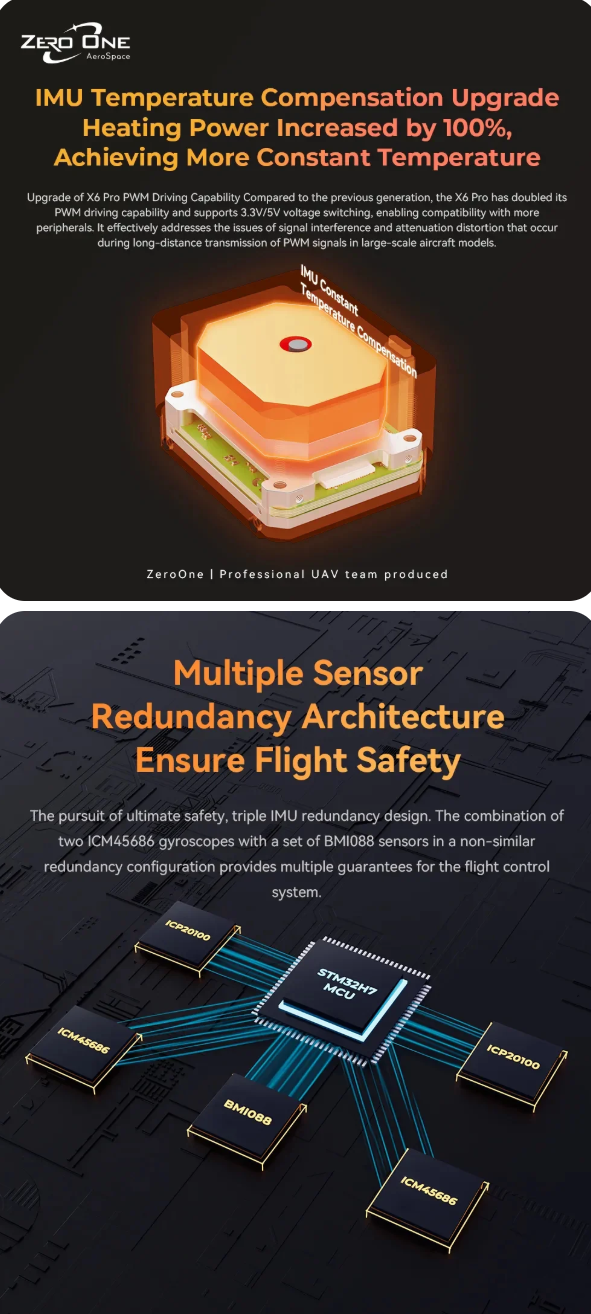
ZeroOne X6 Pro는 IMU 온도 보상을 향상시키고, 난방 전력을 두 배로 늘리며, ICM45686 및 BMI088 센서가 STM32H7 MCU에 연결되어 있는 삼중 IMU 중복을 통해 비행 안전을 보장합니다.
ZeroOne X6 Pro는 FMU v6X, STM32 MCU, 16 PWM 채널, 이중 DroneCAN 전원, 9.9V 서보 모니터링, -20°C–85°C 작동, 94g 무게를 특징으로 하며, 헬리콥터, 멀티로터, VTOL, UGV 및 USV를 위한 ArduPilot/PX4를 지원합니다.






