Płyta odbiornika RTK GNSS ZED-F9P-01B-01, USB-C, UART2 RTCM3, SMA & U.FL Antena, Pixhawk GH1.25-6P
Płyta odbiornika RTK GNSS ZED-F9P-01B-01, USB-C, UART2 RTCM3, SMA & U.FL Antena, Pixhawk GH1.25-6P
RCDrone
Nie można załadować gotowości do odbioru
Przegląd
Ta płyta odbiornika GNSS oparta jest na module u-blox ZED-F9P-01B-01 i zapewnia wsparcie dla różnicowego pozycjonowania RTK z interfejsem USB-C, pinami UART/SPI oraz opcjami podłączenia podwójnej anteny do integracji w systemach robotyki, autopilotów i nawigacji.
Kluczowe cechy
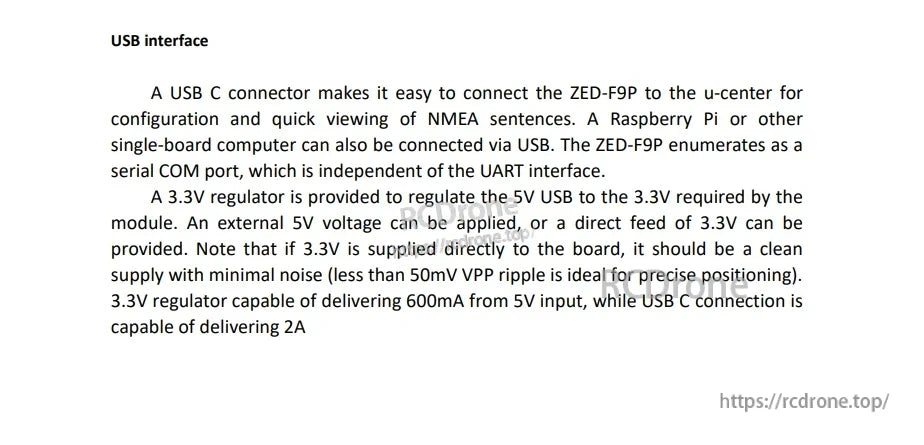
- Interfejs USB: Połączenie USB typu C do konfiguracji z u-center i szybkiego przeglądania zdań NMEA; wyświetla się jako port szeregowy COM niezależny od interfejsu UART.
- Opcje zasilania: Wbudowany regulator 3.3V przekształca 5V USB na 3.3V wymagane przez moduł; obsługuje zewnętrzne zasilanie 5V lub bezpośrednie zasilanie 3.3V.
- Rekomendacja niskiego szumu 3.3V: Przy zasilaniu 3.3V bezpośrednio zaleca się czyste zasilanie z minimalnym szumem (mniej niż 50mV PVP jako idealne dla precyzyjnego pozycjonowania).
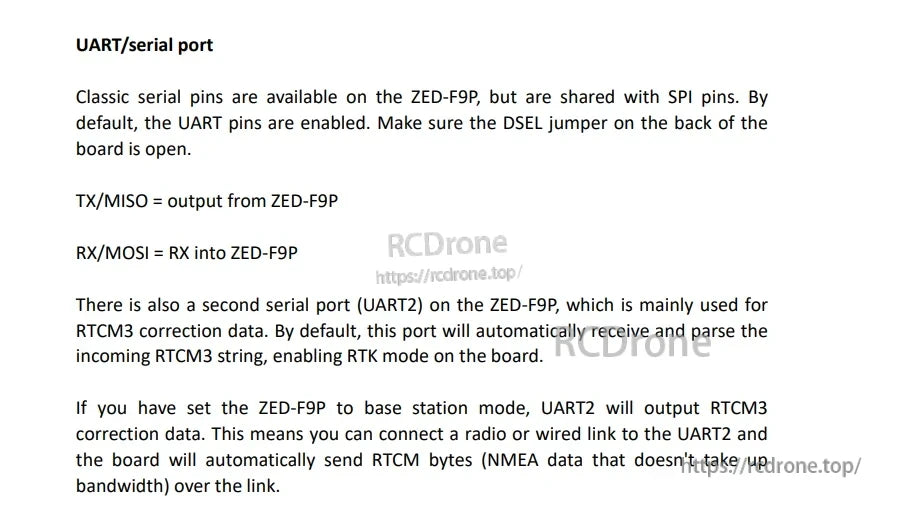
- Udostępnianie UART/SPI: Klasyczne piny szeregowe są dostępne, ale dzielone z pinami SPI; domyślnie włączone są piny UART.Złącze DSEL z tyłu płyty powinno być otwarte.
- Obsługa RTCM3 na UART2: Drugi port szeregowy (UART2) jest głównie używany do danych korekcyjnych RTCM3; domyślnie automatycznie odbiera i analizuje nadchodzące RTCM3, aby włączyć tryb RTK. W trybie stacji bazowej, UART2 wyprowadza dane korekcyjne RTCM3.
- Złącze autopilota: GH1.25-6P (standard Pixhawk JST-GH) do podłączenia do autopilota Pixhawk i/lub zasilania płyty.
- Złącza antenowe: Dostarczono dwa interfejsy antenowe: SMA (zewnętrzny gwint, wewnętrzny otwór) oraz U.FL (IPEX); można użyć dowolnego z nich.
- Diody LED statusu: Cztery diody LED statusu (Zasilanie, PPS, RTK, FENCE) do wskazania systemu/RTK/geofencingu.
Specyfikacje
| Moduł GNSS (etykieta modułu) | u-blox ZED-F9P-01B-01 |
| Oznaczenie płyty (widoczne na zdjęciu płyty) | ZED-F9P-01B-00 |
| USB | USB Typ-C; wyświetla się jako port szeregowy COM (niezależny od UART) |
| Szeregowy / SPI | Piny UART współdzielone z pinami SPI; UART włączony domyślnie; zworka DSEL z tyłu powinna być otwarta |
| Kierunek pinu UART (współdzielony z SPI) | TX/MISO = wyjście z ZED-F9P; RX/MOSI = RX do ZED-F9P |
| Drugi port szeregowy | UART2 (głównie do danych korekcyjnych RTCM3; może wyprowadzać RTCM3 w trybie stacji bazowej) |
| Regulacja zasilania | Regulator 3.3V zapewniony do regulacji 5V USB do 3.3V wymagane przez moduł |
| Opcje zasilania (podane) | USB 5V, zewnętrzne 5V lub bezpośrednie zasilanie 3.3V |
| Uwaga dotycząca szumów zasilania 3.3V (podana) | Mniej niż 50mV PVP ripple jest podane jako idealne przy zasilaniu 3.3V bezpośrednio |
| Możliwości regulatora 3.3V (podane) | 600mA z wejścia 5V |
| Możliwości zasilania USB-C (podane) | Możliwość dostarczenia 2A |
| Port J3 | GH1.25-6P (standard Pixhawk JST-GH) |
| Pinout J3 (standard Pixhawk) | 1: 5V_IN; 2: ZED-F9P UART1 odbieranie (poziom 3.3V); 3: ZED-F9P UART1 TX (poziom 3.3V); 4,5: Nie podłączone; 6: Masa |
| Wskaźniki LED (opisane) | Zasilanie (czerwony, gdy 3.3V aktywne przez USB lub magistralę Qwiic); PPS (żółty, raz na sekundę po zablokowaniu pozycji); RTK (niebieski: włączony po zasilaniu, miga po odebraniu danych RTCM, wyłącza się po ustaleniu RTK); FENCE (konfigurowalne dla aplikacji geofencing) |
| Interfejsy antenowe | SMA i U.FL (IPEX); dowolny interfejs jest akceptowalny |
| Etykiety nagłówków (sitodruk, lewa strona) | GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT |
| Etykiety nagłówków (sitodruk, prawa strona) | GND, 5V, 3V3, TX2, RX2, CS, RX/MOSI, TX/MISO, SCK |
Aplikacje
- Pozycjonowanie RTK GNSS dla dronów, UGV, robotyki i prototypów nawigacyjnych
- Integracja GNSS Pixhawk/autopilot przez JST-GH (GH1.25-6P) połączenie szeregowe
- Ustawienia RTK oparte na RTCM3 wykorzystujące UART2 do połączeń danych korekcyjnych (radiowo lub przewodowo)
W przypadku pytań dotyczących kompatybilności (wybór UART/SPI, okablowanie RTCM3, anteny lub integracja), skontaktuj się z pomocą techniczną pod adresem https://rcdrone.top/ lub wyślij e-mail na [email protected].
Szczegóły

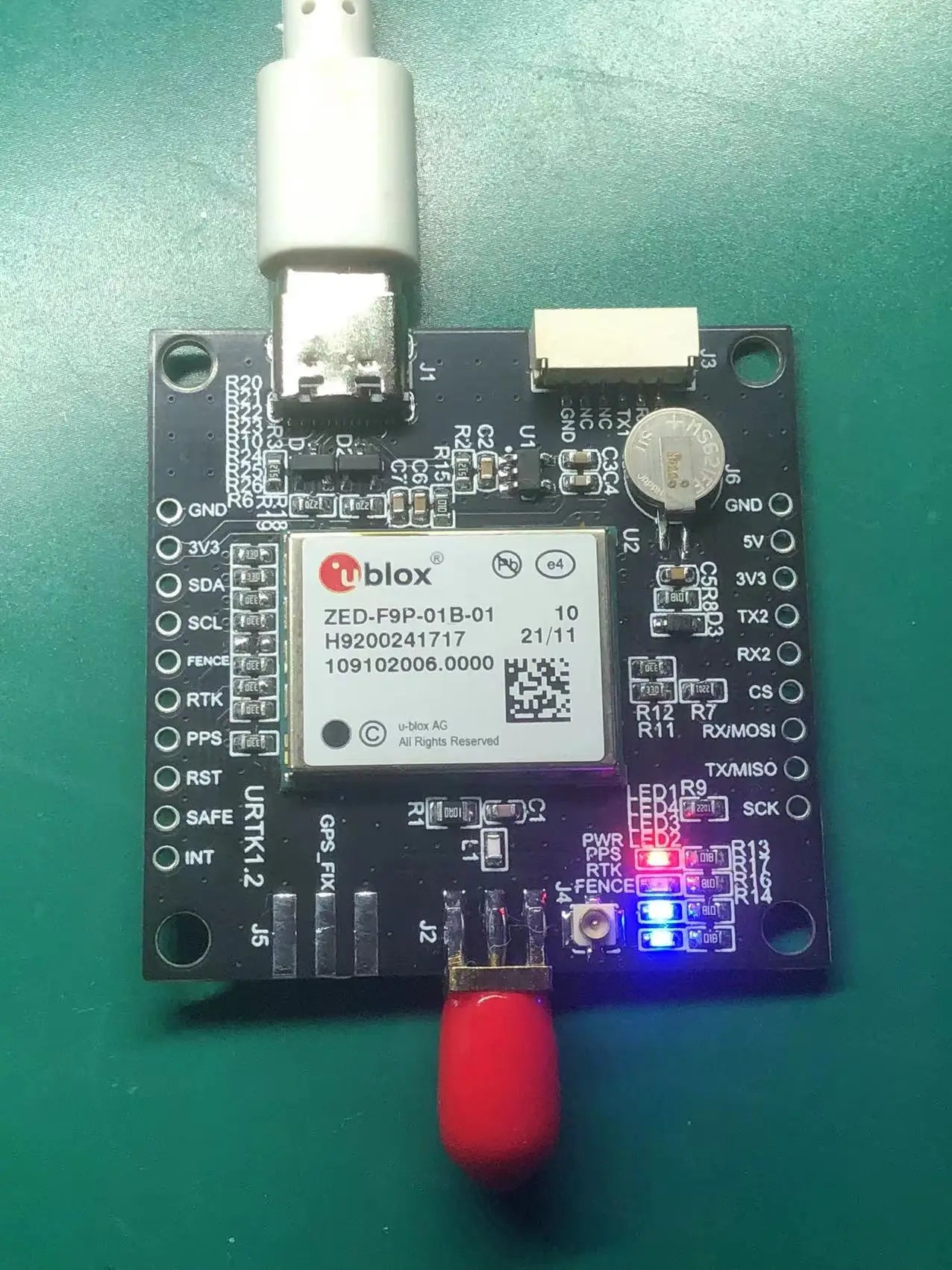
Płytka odbiornika ZED-F9P łączy złącze USB-C z wyraźnie oznaczonymi pinami I/O oraz U.FL złączem antenowym dla łatwej integracji.
Interfejs USB‑C łączy ZED‑F9P z u‑center lub Raspberry Pi jako niezależny port szeregowy COM, z regulacją 3.3V z zasilania USB 5V.
Płytka ZED-F9P wykorzystuje współdzielone piny UART/SPI oraz drugi port szeregowy (UART2), który jest powszechnie używany do danych korekcyjnych RTCM3, aby umożliwić tryb RTK.
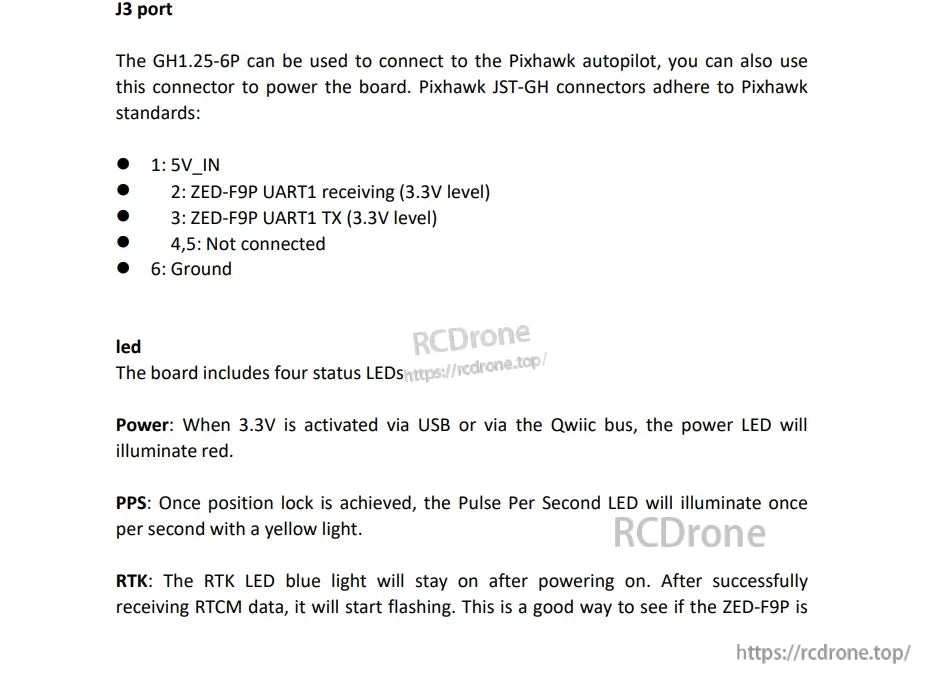
Pinout złącza J3 GH1.25-6P Pixhawk wymienia 5V_IN, UART1 RX/TX (3.3V poziom), oraz masa, a płytka wykorzystuje cztery diody LED statusowe do zasilania, blokady PPS oraz aktywności RTK/RTCM.
Płytka odbiornika GNSS ZED-F9P RTK oferuje dwie opcje interfejsu antenowego—SMA i U.FL (IPEX)—dla elastycznej instalacji.
Related Collections