




Nowy APM2.8 APM 2.8 Upgrade2.5 2.6 wersja nr/wbudowana płyta kontrolera lotu kompasu wygięta szpilka z etui dla majsterkowiczów FPV RC Drone
Nowy APM2.8 APM 2.8 Upgrade2.5 2.6 wersja nr/wbudowana płyta kontrolera lotu kompasu wygięta szpilka z etui dla majsterkowiczów FPV RC Drone
RCDrone
Nie można załadować gotowości do odbioru
DANE TECHNICZNE
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Części/akcesoria do modernizacji: Adapter
Narzędzia: Cięcie
Parametry techniczne: Wartość 2 Urządzenia peryferyjne/urządzenia do zdalnego sterowania: Odbiorniki Zalecany wiek: 18+,12+y Części RC i akcesoria: Złącza/okablowanie Pochodzenie: Chiny kontynentalne Numer modelu: APM2. 8 Materiał: Metal Napęd na cztery koła Atrybuty: Montaż Dla typu pojazdu: Samoloty Nazwa marki: uuustore APM2. 8 rano 2. 8 Nie / Wbudowana płyta kontrolera lotu kompasu Wygięta szpilka z etui do majsterkowania FPV RC Drone Multicopter Uważaj: ---- Z etui ochronnym, ale bez amortyzatora! Aby uzyskać szczegółowe informacje na temat połączenia i programowania, skontaktuj się ze mną bezpośrednio. Rozmiar: 70*45*13. 5 Właściwości: 
- 1* APM2. 8 tablic (musisz wybrać z kompasem lub bez kompasu)
-1* APM2. 8 Futerał ochronny
Waga: 28G
APM to sterowanie lotem typu open source, czy możesz dobrze grać w APM w zależności od indywidualnych umiejętności. Gracz musi posiadać podstawową wiedzę na temat monolitycznych układów scalonych, język C, wiedzę z zakresu elektryki, mechaniki, a także potrzebuje pewnego stopnia zdolności umysłowych, zasobów finansowych i materialnych, wsparcia energetycznego. Jeśli nie jesteś gotowy, zalecamy najpierw przygotowanie kilku informacji wprowadzających.
Wprowadzenie:
Wyeliminuj V2. 52 Wersja Stara 1. Interfejs GPS 0mm 6P SM06B, zmieniony na zewnętrzny interfejs I2C kompasu DF13-4P, umieść interfejs GPS DF13-5P z zewnętrznymi interfejsami kompasu, wygodniejszy do połączeń GPS z zewnętrznym kompasem.
Zastąpił V2. 52 interfejs I2C do wielofunkcyjnych interfejsów MUX, z których mogą korzystać sami użytkownicy za pośrednictwem dowolnie konfigurowalnego wyjścia funkcji Pad na tylnej płycie, opcjonalne UART0, UART2, I2C, OSD, domyślny interfejs OSD, unikając 2. 52, jeśli chcesz korzystać zarówno z transmisji danych, jak i OSD, musisz użyć linii Y oddzielającej program interfejsu. Ulepszony interfejs OSD, gdy jest używany w połączeniu z transmisją danych, ze względu na rezystancję izolacji, skuteczniej pozwala uniknąć zakłóceń transmisji danych.
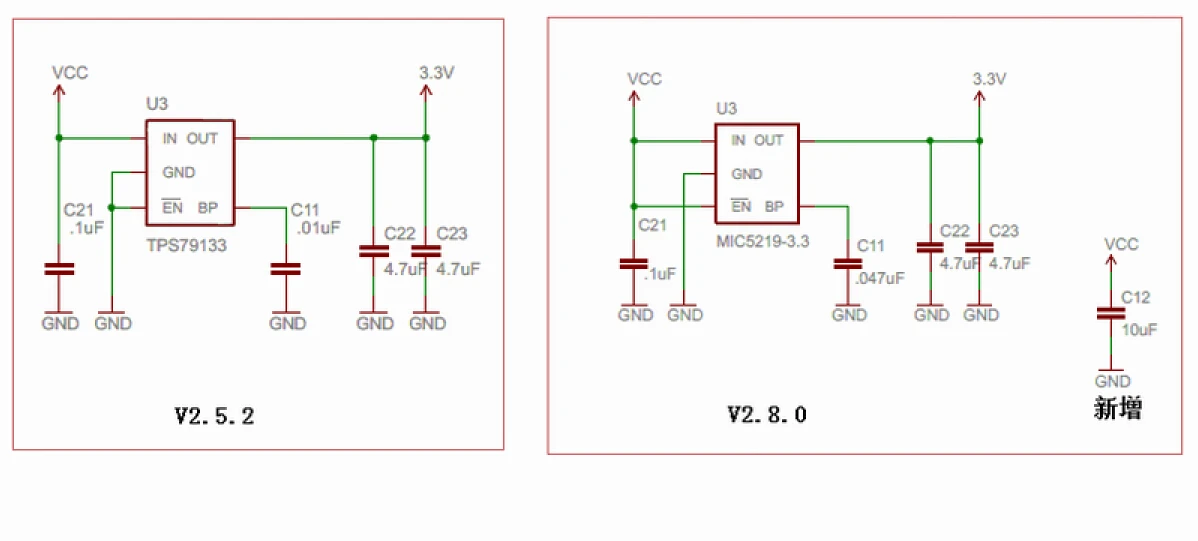
Nowa wersja 2. 8 0 użyj pół-LP2985-3 ze Stanów Zjednoczonych. 3, odporny na ciśnienie do 16 V, zwiększona niezawodność, zmniejszone prawdopodobieństwo złego stanu żyroskopu z powodu problemów z napięciem. 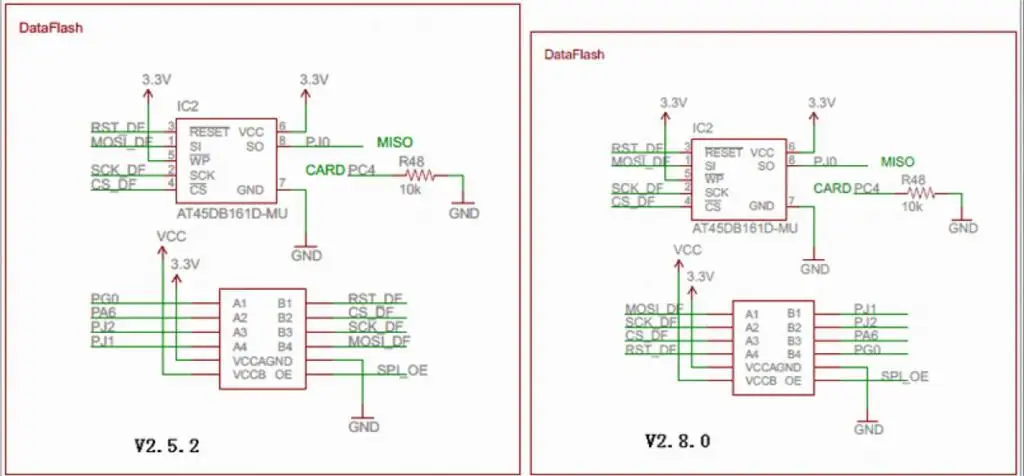
- Kompatybilny z Arduino!
- Można zamówić z górnymi kołkami wejściowymi do pionowego mocowania złączy lub bocznymi kołkami wejściowymi do poziomego wsuwania złączy na obu końcach
- Wbudowany 4-megabajtowy układ Dataflash do automatycznego rejestrowania danych
- Opcjonalny zewnętrzny GPS, moduł uBlox LEA-6H z kompasem.
- Jeden z pierwszych systemów autopilota typu open source wykorzystujący akcelerometr/żyroskop MPU-6000 firmy Invensense o 6 stopniach swobody.
- Czujnik ciśnienia barometrycznego zaktualizowany do MS5611-01BA03, od Measurement Specialties.
- Chipy ATMEGA2560 i ATMEGA32U-2 firmy Atmel odpowiednio do przetwarzania i funkcji USB. 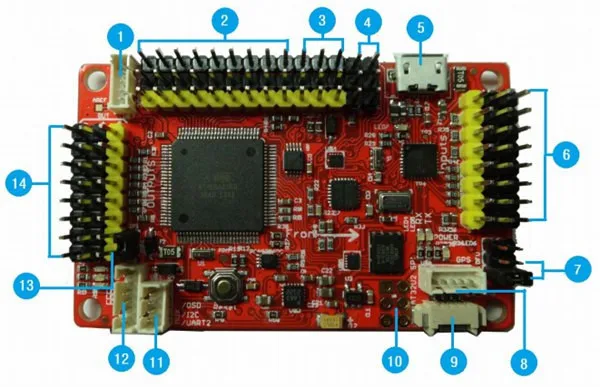
2. port czujnika analogowego
3. wyjście gimbala z autostabilizacją
4. Port programowania online ATMEGA2560 SPI (przydatny dla optycznego czujnika przepływu)
5. Port USB
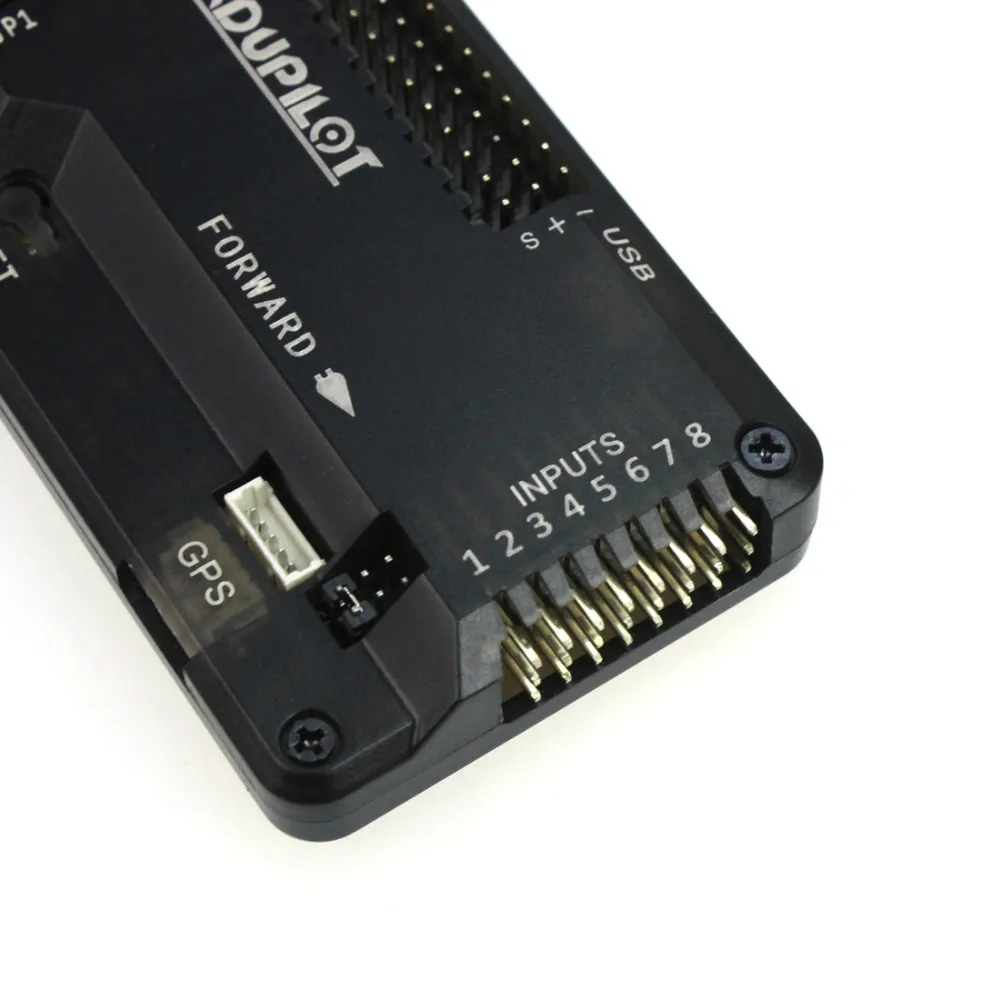
6. wejście zdalnego sterowania
7. zworka wyboru funkcji
8. Port GPS
9. Port zewnętrznego kompasu 12C
10. Port programowania online ATMEGA32U2 SPI
11. wielofunkcyjny konfigurowalny port MUX (domyślnym wyjściem jest OSD)
12. prąd napięcie port
13. Zworka wyboru zasilania ESC
14. Port wyjściowy ESC












Related Collections




