

















SteadyWin GIM3505-8 Wbudowany silnik planetarny — moduł stawu robota czworonożnego, przekładnia 8:1, 24V, CAN, IP54
SteadyWin GIM3505-8 Wbudowany silnik planetarny — moduł stawu robota czworonożnego, przekładnia 8:1, 24V, CAN, IP54
SteadyWin
Nie można załadować gotowości do odbioru
Przegląd
SteadyWin GIM3505-8 wbudowany moduł stawowy robota czworonożnego z planetarnym silnikiem redukcyjnym zaprojektowany do kompaktowych stawów robotycznych i zespołów napędowych. GIM3505-8 integruje reduktor planetarny 8:1 z silnikiem bezszczotkowym i opcjami sterownika na pokładzie, aby zapewnić kontrolowany ruch dla robotów czworonożnych, ramion robotycznych, stawów humanoidalnych i podobnych systemów mechatronicznych.
Kluczowe cechy
- Zaawansowany system przekładni planetarnej dla niskiego luzu i płynnego ruchu (luz przekładni: 15 arcmin).
- Szeroka adaptacyjność napięcia: napięcie znamionowe 24 V z zakresem roboczym 12~48 V.
- Wysoka gęstość momentu obrotowego i wydajność: stała momentu 0,52 N·m/A z momentem znamionowym 0,65 N·m i momentem szczytowym 1,27 N·m.
- Kompaktowe wymiary: Ø43 × 23,6 mm (bez sterownika); Ø43 × 30 mm (ze sterownikiem).
- Zintegrowane zabezpieczenia bezpieczeństwa: zabezpieczenia przed przegrzaniem, przepięciem i przeciążeniem (trójwarstwowa ochrona podana w dokumentacji produktu).
- Interfejs komunikacyjny CAN; obsługuje oddzielny enkoder i opcjonalny niestandardowy hamulec.
Specyfikacje
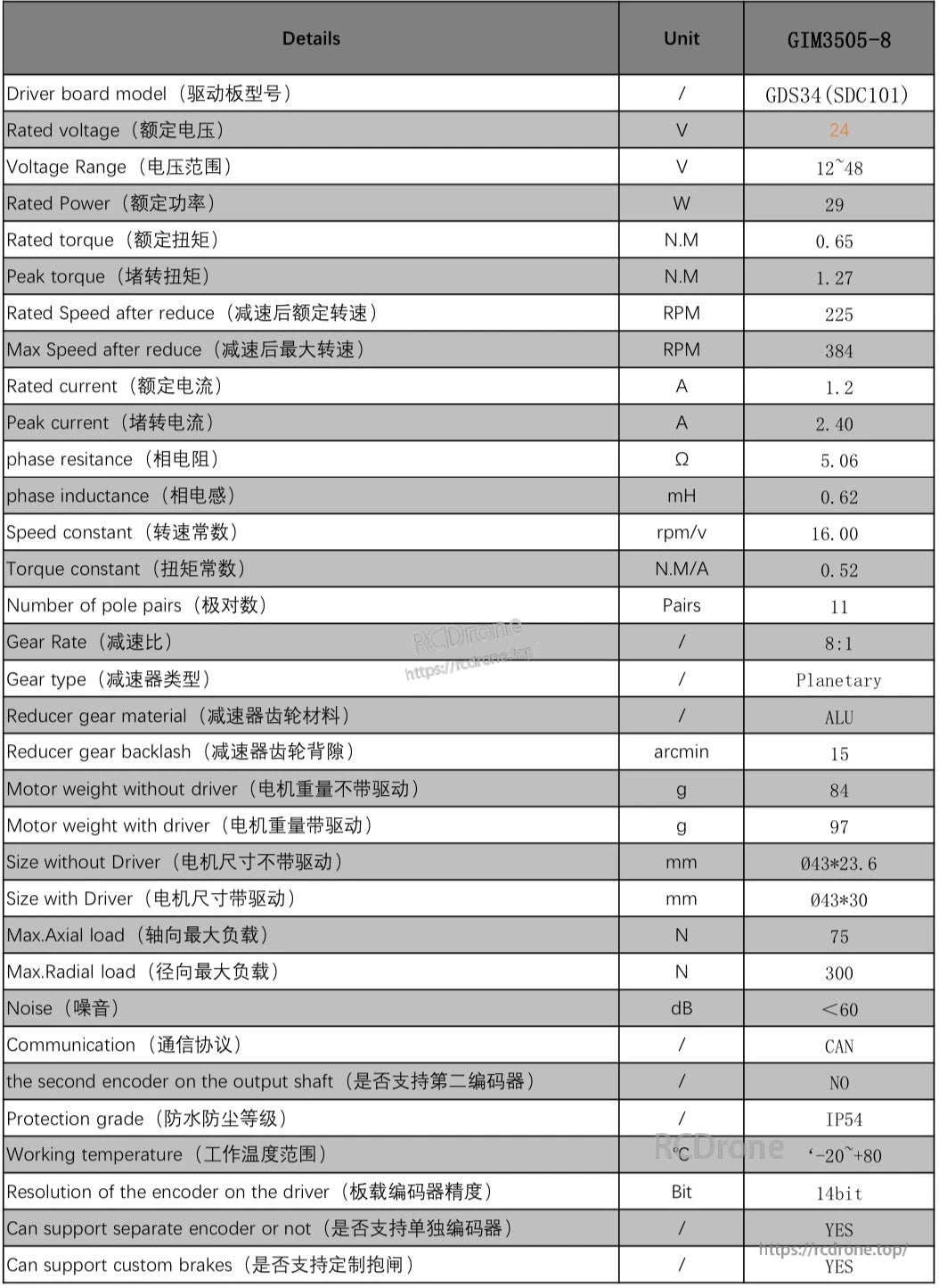
Parametr Wartość ---------------------------------------- -------------------------- Model GIM3505-8 Model płyty sterującej GDS34 (SDC101) Napięcie znamionowe 24 V Zakres napięcia 12~48 V Moc znamionowa 29 W Moment obrotowy znamionowy 0.65 N·m Moment obrotowy szczytowy (zatrzymania) 1.27 N·m Prędkość znamionowa po redukcji 225 RPM Maksymalna prędkość po redukcji 384 RPM Prąd znamionowy 1.2 A Prąd szczytowy (zatrzymania) 2.4 A Opór fazy 5.06 Ω Indukcyjność fazy 0.62 mH Stała prędkości 16 rpm/V Stała momentu obrotowego 0.52 N·m/A Liczba par biegunów 11 Par Przełożenie 8:1 Typ przekładni Planetarna Materiał przekładni redukcyjnej ALU Luz przekładni redukcyjnej 15 arcmin Waga silnika (bez sterownika) 84 g Waga silnika (ze sterownikiem) 97 g Rozmiar (bez sterownika) Ø43*23.6 mm Rozmiar (z napędem) Ø43*30 mm Maksymalne obciążenie osiowe 75 N Maksymalne obciążenie promieniowe 300 N Hałas <60 dB Komunikacja CAN Drugi enkoder na wałku wyjściowym NIE Klasa ochrony IP54 Temperatura pracy -20°C do +80°C Rozdzielczość enkodera na napędzie 14 Bit Wsparcie dla oddzielnego enkodera TAK Wsparcie dla niestandardowego hamulca TAK
Aplikacje
- Roboty czworonożne (stawy nóg i siłowniki)
- Stawy robotów humanoidalnych
- Ramiona robotyczne i manipulatory
- Siłowniki egzoszkieletów
- Moduły kierownicze i artykulacyjne AGV/AMR
- Autonomiczne projekty badawcze i robotyki na uczelniach
W celu uzyskania informacji o obsłudze klienta i zapytań technicznych, skontaktuj się z [email protected].
Instrukcje
Szczegóły


SteadyWin specyfikacje złącza GIM3505-8: 24V, 29W, moment obrotowy 0.65N.M, przekładnia planetarna, komunikacja CAN, klasa IP54, obsługuje niestandardowe hamulce i oddzielne enkodery, działa w temperaturze -20°C do +80°C.
Related Collections

















