




CEREBOTO OpenArm 7DOF Zestaw Ramienia Robotycznego – Do samodzielnego montażu lub złożony, otwarty kod ROS/Python
CEREBOTO OpenArm 7DOF Zestaw Ramienia Robotycznego – Do samodzielnego montażu lub złożony, otwarty kod ROS/Python
CEREBOTO
Nie można załadować gotowości do odbioru
Przegląd
Robotyczny ramie CEREBOTO OpenArm 7DOF to ramie robotyczne klasy badawczej, zaprojektowane dla uniwersytetów, laboratoriów, startupów i poważnych twórców. Z 7 stopniami swobody, zasięgiem ramienia 633 mm, typowym obciążeniem 4,1 kg i maksymalnym obciążeniem 6,0 kg na ramię, OpenArm zapewnia precyzyjny ruch, bezpieczną interakcję fizyczną i bogate narzędzia open-source.
Możesz wybrać zestaw sprzętowy DIY do pełnego montażu ręcznego lub fabrycznie skalibrowane, gotowe do użycia ramię. Dostępne są konfiguracje jedno-ramienne, dwu-ramienne i cztero-ramienne.
Kluczowe cechy
-
7DOF robotyczne ramię w skali człowieka – zaprojektowane, aby odpowiadać długości ramienia człowieka 160–165 cm dla naturalnej manipulacji i teleoperacji.
-
Wysokie obciążenie &i stabilność – typowe obciążenie 4,1 kg, maksymalne obciążenie 6,0 kg na ramię, przy wadze ramienia 5,5 kg.
-
Silniki z możliwością napędu wstecznego &i struktura elastyczna – bezpieczna, płynna interakcja dla współpracy człowiek-robot oraz zadań kontrolowanych siłą.
-
Pętla kontrolna CAN-FD 1 kHz – kontrola w czasie rzeczywistym, o niskim opóźnieniu dla aplikacji badawczych o wysokiej wydajności i przemysłowych.
-
Całkowicie metalowa konstrukcja – solidna główna struktura z aluminium i stali nierdzewnej dla sztywności i trwałości.
-
Sprzęt &i oprogramowanie open-source – otwarte CAD, PCB, oprogramowanie układowe i kontrolne dla głębokiej personalizacji.
-
Wsparcie dla ROS, Pythona i C++ – oficjalna integracja ROS oraz API Pythona/C++ dla szybkiego rozwoju algorytmów.
-
Bogaty ekosystem i rozszerzenia – wspiera zręczne robotyczne ręce, rękawice do śledzenia ruchu oraz mobilne podstawy dla kompletnych platform robotycznych.
Specyfikacje techniczne
-
Stopnie swobody: 7 DOF na ramię
-
Zasięg ramienia: 633 mm
-
Typowy ładunek: 4.1 kg
-
Maksymalny ładunek: 6.0 kg na ramię
-
Waga ramienia: ok. 5.5 kg na ramię
-
Materiały: części konstrukcyjne z aluminium i stali nierdzewnej
-
Interfejs sterowania: CAN / CAN-FD, UART (za pomocą dołączonego adaptera USB2CANFD-X2 w wersjach z podwójnym/quad-ramieniem)
-
Częstotliwość sterowania: do 1 kHz pętli CAN-FD
-
Wsparcie oprogramowania: framework ROS, API Pythona, API C++
-
Ergonomia: długość ramienia dostosowana do użytkowników o wzroście 160–165 cm
Oprogramowanie &i ekosystem open-source
OpenArm to w pełni open-source'owa platforma ramienia robota. Oficjalne zasoby obejmują:
-
Strona internetowa: openarm.dev
-
Dokumentacja: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Film instruktażowy: oficjalny przewodnik YouTube dotyczący rozpoczęcia
Dzięki otwartym plikom CAD, PCB i oprogramowania układowego możesz modyfikować mechanikę, elektronikę i oprogramowanie sterujące lub rozszerzać ramię o nowe czujniki i efekty końcowe dla własnych tematów badawczych.
Typowe scenariusze zastosowań
OpenArm został zaprojektowany jako wszechstronna, precyzyjna platforma badawcza i dydaktyczna dla:
-
Kursów robotyki na uniwersytetach i eksperymentów laboratoryjnych
-
Instytutów badawczych i projektów laboratoryjnych
-
Badania nad uczeniem przez wzmocnienie i AI opartą na fizyce
-
Interakcją człowiek-robot i badaniami nad robotami współpracującymi
-
Przestrzeniami twórczymi i zespołami sprzętu open-source
-
Platformami edukacyjnymi i szkoleniowymi w dziedzinie inżynierii
Dzięki swojemu rozmiarowi w skali człowieka i elastycznemu napędowi, OpenArm jest idealny do manipulacji, teleoperacji, uczenia przez naśladowanie, robotyki asystującej i nie tylko.
Wersje Produktu &i Konfiguracje
Wersja 1 – Zestaw DIY Hardware
-
Dla użytkowników z silnymi umiejętnościami manualnymi, którzy chcą głęboko zrozumieć strukturę mechaniczną.
-
Zawiera wszystkie części mechaniczne, elektryczne i wydrukowane w 3D; samodzielnie składa i kalibruje ramię zgodnie z instrukcją.
Wersja 2 – Gotowe Ramię Robotyczne
-
Dla instytutów badawczych, laboratoriów, firm i edukatorów, którzy potrzebują platformy typu plug-and-play.
-
W pełni złożone, dostrojone i skalibrowane przed wysyłką; gotowe do użycia od razu po wyjęciu z pudełka.
Dostępne konfiguracje ramion (w zależności od oferty):
-
Zestaw DIY – Jedno ramię
-
Gotowe ramię – Jedno ramię
-
Zestaw DIY – Dwa ramiona
-
Gotowe ramiona – Dwa ramiona
-
Zestaw DIY – Cztery ramiona
-
Gotowe ramiona – Cztery ramiona
Zawartość opakowania
Każdy zestaw OpenArm lub gotowy system zazwyczaj zawiera:
-
Główne komponenty strukturalne z aluminium i stali nierdzewnej
-
Silniki, płyty sterujące, zasilacz i kable
-
Części wydrukowane w technologii 3D i zestawy śrub
Wersje z podwójnym ramieniem i czterema ramionami: jeden oficjalny kompatybilny z BOM USB2CANFD-X2 urządzenie (CEREBOTO jest autoryzowanym krajowym agentem) do komunikacji PC z CAN-FD.
Obsługiwane rozszerzenia sprzętowe
OpenArm obsługuje wiele dodatków sprzętowych (sprzedawanych osobno), umożliwiając budowę kompletnego systemu robotycznego:
-
Zwinna ręka robotyczna – do precyzyjnej manipulacji i badań chwytania.
-
Zestaw rękawic do śledzenia ruchu – do intuicyjnej teleoperacji i nauki przez naśladowanie.
-
Mobilna podstawa – aby przekształcić OpenArm w mobilną platformę manipulatora.
FAQ
Q: Czy ramię robotyczne można używać od razu?
A: Wersja gotowego ramienia jest w pełni dostrojona i skalibrowana w fabryce—wystarczy je włączyć i zacząć pracować. Zestaw sprzętowy DIY wymaga złożenia i skonfigurowania systemu zgodnie z instrukcjami.
Q: Czy OpenArm jest kompatybilny z ROS lub innym oprogramowaniem pośredniczącym?
A: Tak. OpenArm oficjalnie wspiera framework ROS, a także można kontrolować ramię za pomocą interfejsów API w Pythonie i C++.
Q: Dla kogo jest ten produkt?
A: Badacze z uniwersytetów i instytutów, laboratoria AI &i robotyki, kursy dydaktyczne, centra szkoleniowe inżynieryjne oraz zaawansowani hobbyści.
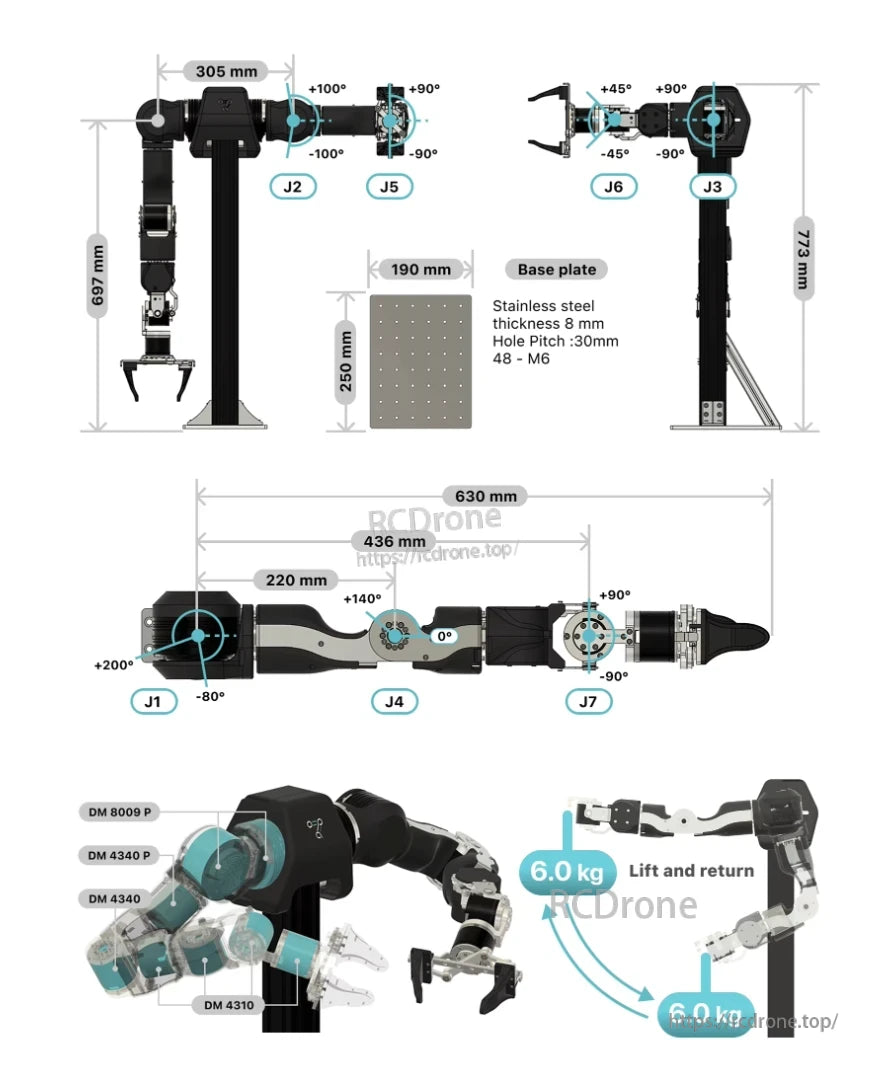
Robotyczne ramię Cereboto OpenArm 7DOF ma siedem stawów (J1–J7) z określonymi zakresami kątowymi. Ma wysokość 697 mm lub 773 mm, zasięg 630 mm i montuje się na stalowej płycie bazowej o wymiarach 190×250 mm—grubości 8 mm z 48 otworami M6 rozmieszczonymi co 30 mm. Napędzane przez silniki DM8009P, DM4340P, DM4340 i DM4310, obsługuje ładunki o wadze 6,0 kg z precyzją. Zaprojektowane do użytku przemysłowego i badawczego, łączy solidność konstrukcyjną z dokładną kontrolą ruchu.

Related Collections



