







CRA-RI50-60-PRO-S Zintegrowany przegubowy siłownik robota, 51/81/101:1, 23–34 N·m szczyt, wał drążony, 24–48 V, CAN, 17-bit
CRA-RI50-60-PRO-S Zintegrowany przegubowy siłownik robota, 51/81/101:1, 23–34 N·m szczyt, wał drążony, 24–48 V, CAN, 17-bit
Ti5 Robot
Nie można załadować gotowości do odbioru
Przegląd
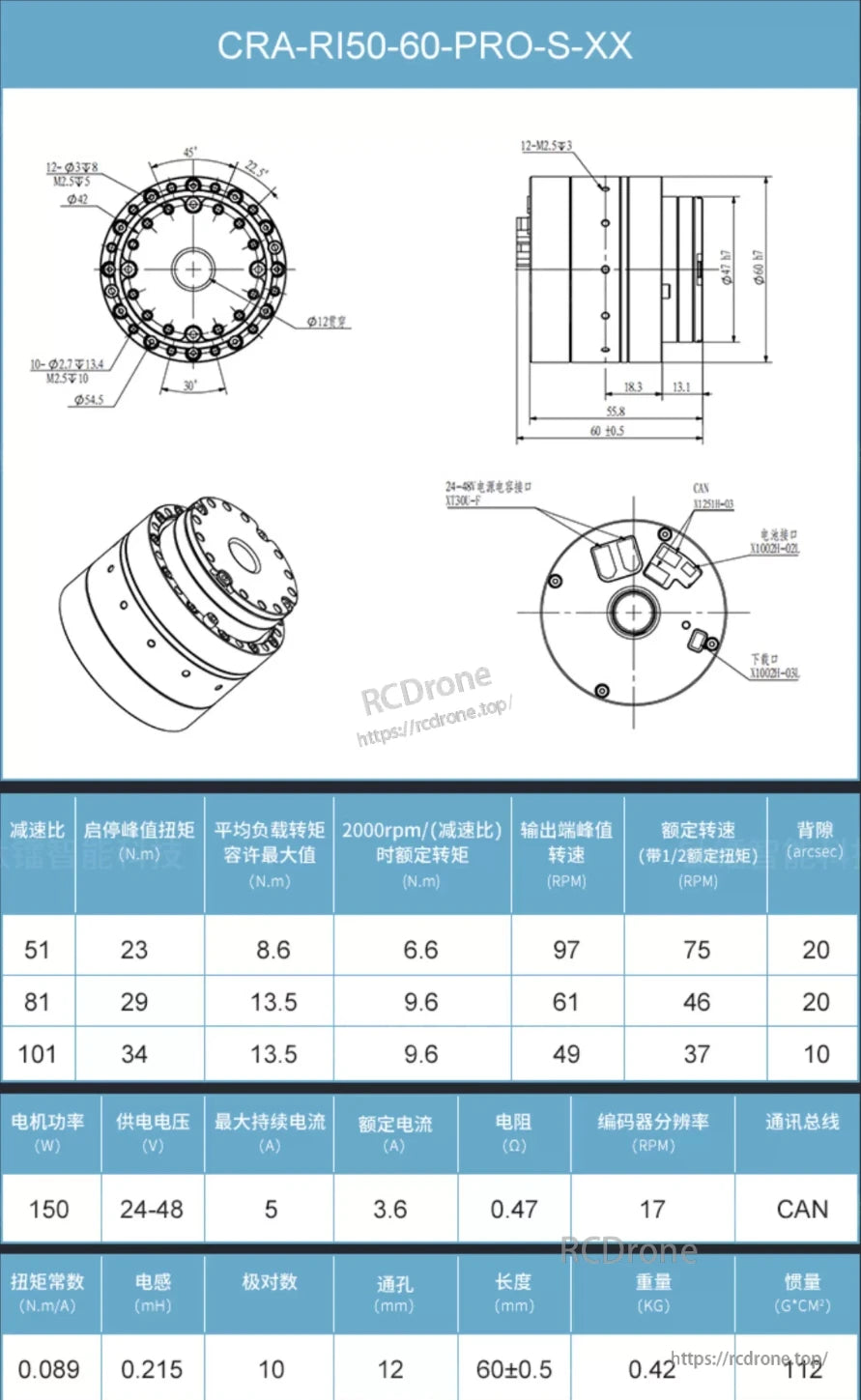
CRA-RI50-60-PRO-S-XX to kompaktowy, zintegrowany siłownik przegubów robota z wałem pustym, przeznaczony do małych/lekkich ramion, robotów humanoidalnych, cobotów, egzoszkieletów i mechanizmów bezzałogowych statków powietrznych (UAV). Łączy on bezramkowy silnik momentu obrotowego, precyzyjny reduktor, sprzężenie zwrotne z podwójnym enkoderem i elektronikę napędową w module klasy 60 mm. Seria PRO-S kładzie nacisk na miniaturyzację, szybką reakcję i wysoki stosunek obciążenia do masy. Moduł RI50 oferuje trzy opcje redukcji (51/81/101:1) z maksymalnym momentem obrotowym start/stop do 34 Nm i znamionową prędkością wyjściową 75 obr./min (zależnie od przełożenia). Interfejs magistrali CAN i wejście 24–48 V ułatwiają integrację z systemami wieloosiowymi.
Główne cechy
-
Zintegrowany przegub klasy 60 mm z wał pusty (otwór przelotowy na kable/węże)
-
Przełożenia redukcyjne: 51:1/81:1/101:1
-
Moment szczytowy start/stop: 23/29/34 N·m (zależnie od stosunku)
-
Prędkość znamionowa (przy 1/2 momentu znamionowego): do 75 obr./min (51:1)
-
Reakcja: 20 sekund łuku (51/81:1), 10 sekund łuku (101:1)
-
Wejście 24–48 V DC, klasa 150 W, komunikacja CAN
-
17-bitowe sprzężenie zwrotne enkodera, szybka reakcja dynamiczna
-
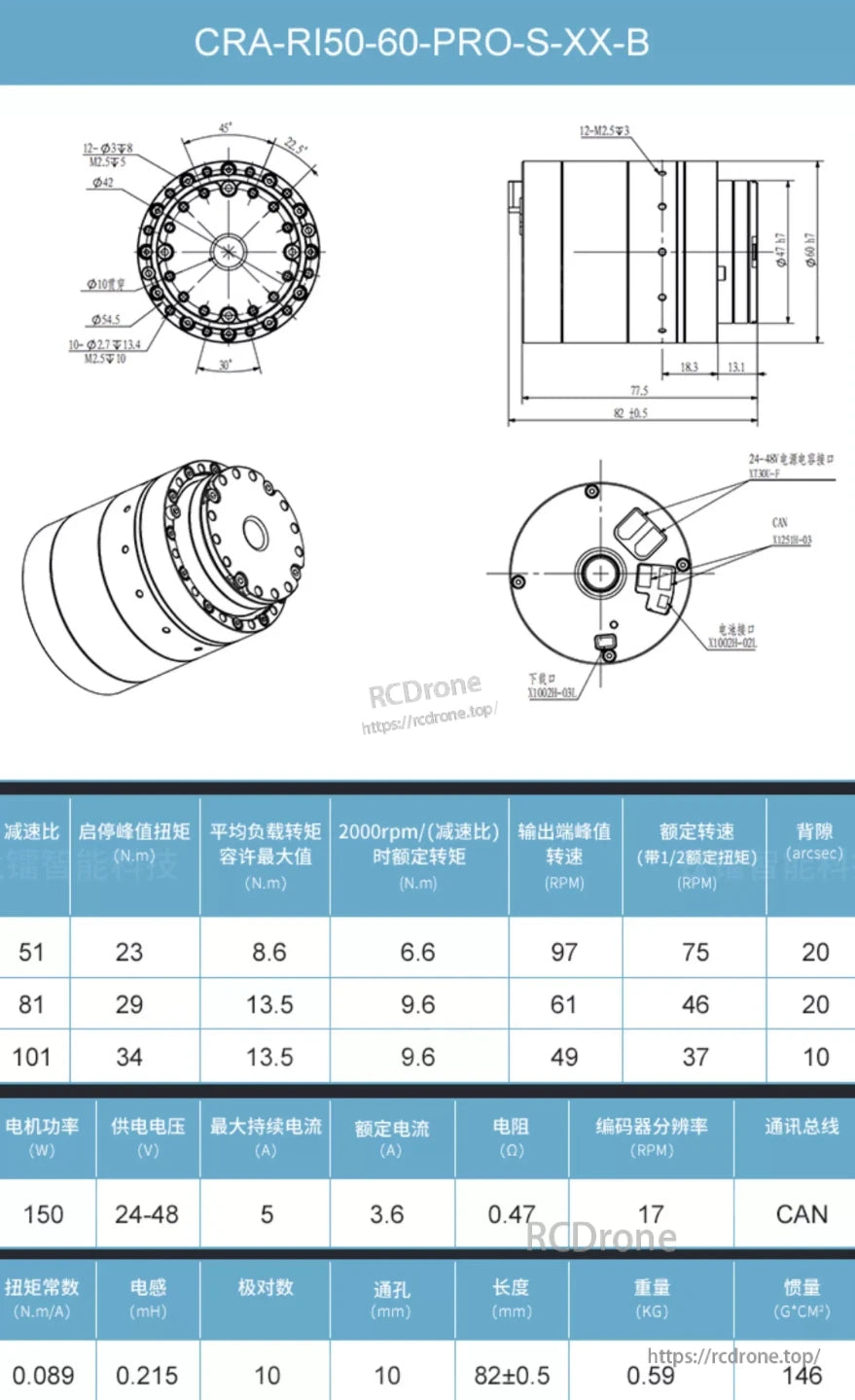
Dwie wersje: standardowa i -B z trzymaniem hamulec (większa długość/waga, mniejszy otwór przelotowy)
Specyfikacje
Wydajność według współczynnika
| Przedmiot | 51:1 | 81:1 | 101:1 |
|---|---|---|---|
| Moment szczytowy start/stop (N·m) | 23 | 29 | 34 |
| Maksymalna średnia nośność momentu obrotowego obciążenia (N·m) | 8.6 | 13,5 | 13,5 |
| Moment obrotowy znamionowy przy 2000 obr./min/(stosunek) (N·m) | 6.6 | 9.6 | 9.6 |
| Maksymalna prędkość wyjściowa (obr./min) | 97 | 61 | 49 |
| Prędkość znamionowa przy 1/2 momentu obrotowego znamionowego (obr./min) | 75 | 46 | 37 |
| Luz (sekundy łuku) | 20 | 20 | 10 |
Elektryczny &wzmacniacz; kontrola (wspólna)
-
Moc silnika: 150 W
-
Napięcie zasilania: 24–48 V prądu stałego
-
Maksymalny ciągły prąd fazowy: 5 A
-
Prąd znamionowy: 3,6 A
-
Rezystancja fazowa: 0,47 Ω
-
Stała momentu obrotowego: 0,089 N·m/A
-
Indukcyjność: 0,215 mH
-
Pary biegunów: 10
-
Rozdzielczość enkodera: 17-bitowy (przyrostowy)
-
Magistrala/Protokół: MÓC
Mechaniczny
Standardowy (CRA-RI50-60-PRO-S-XX)
-
Otwór przelotowy: 12 mm
-
Długość: 60 ± 0,5 mm
-
Masa: 0,42 kg
-
Bezwładność wirnika: 112 g·cm²
Z hamulcem (CRA-RI50-60-PRO-S-XX-B)
-
Otwór przelotowy: 10 mm
-
Długość: 82 ± 0,5 mm
-
Masa: 0,59 kg
-
Bezwładność wirnika: 146 g·cm²
Uwagi: Podane wymiary oznaczają całkowitą długość modułu; wersja z hamulcem posiada dodatkowo hamulec przytrzymujący przy wyłączonym zasilaniu.W materiałach marketingowych serii PRO-S podkreślono miniaturyzację, szybką reakcję i uszczelnioną konstrukcję zapewniającą odporność na kurz i wodę (nie podano konkretnego stopnia ochrony IP).
Aplikacje
-
Ramiona robotyczne współpracujące i stacjonarne o 4–7 stopniach swobody
-
Stawy humanoidalne (ramię, łokieć, biodro, kolano, kostka)
-
Siłowniki egzoszkieletów i roboty rehabilitacyjne
-
Roboty serwisowe/inspekcyjne, manipulatory mobilne
-
Mechanizmy/gimbale bezzałogowych statków powietrznych wymagające kompaktowych połączeń o wysokim momencie obrotowym
-
Platformy automatyki przemysłowej i badań edukacyjnych
Bliższe dane
Siłownik robotyczny CRA-RI50-60-PRO-S-XX z silnikiem o mocy 150 W, zasilaniem 24-48 V, komunikacją CAN i wieloma przełożeniami. Charakteryzuje się wysokim momentem obrotowym, precyzyjną rozdzielczością enkodera i kompaktową konstrukcją do zastosowań w robotyce.
Rower Crabtree Rio 60 Pro XX Black z etykietą nS i WSS041 na 1LZ Zestaw przełożeń Ke4l M257 #45 Mah 4A zębatka #id K1/28r+85e Arcsec z zębatką S 51 23 8,6 6,6, 97 75 20 81 29 13,5 9,6, 61 46 20 101 34 13,5 9,6 i 49 37 10.
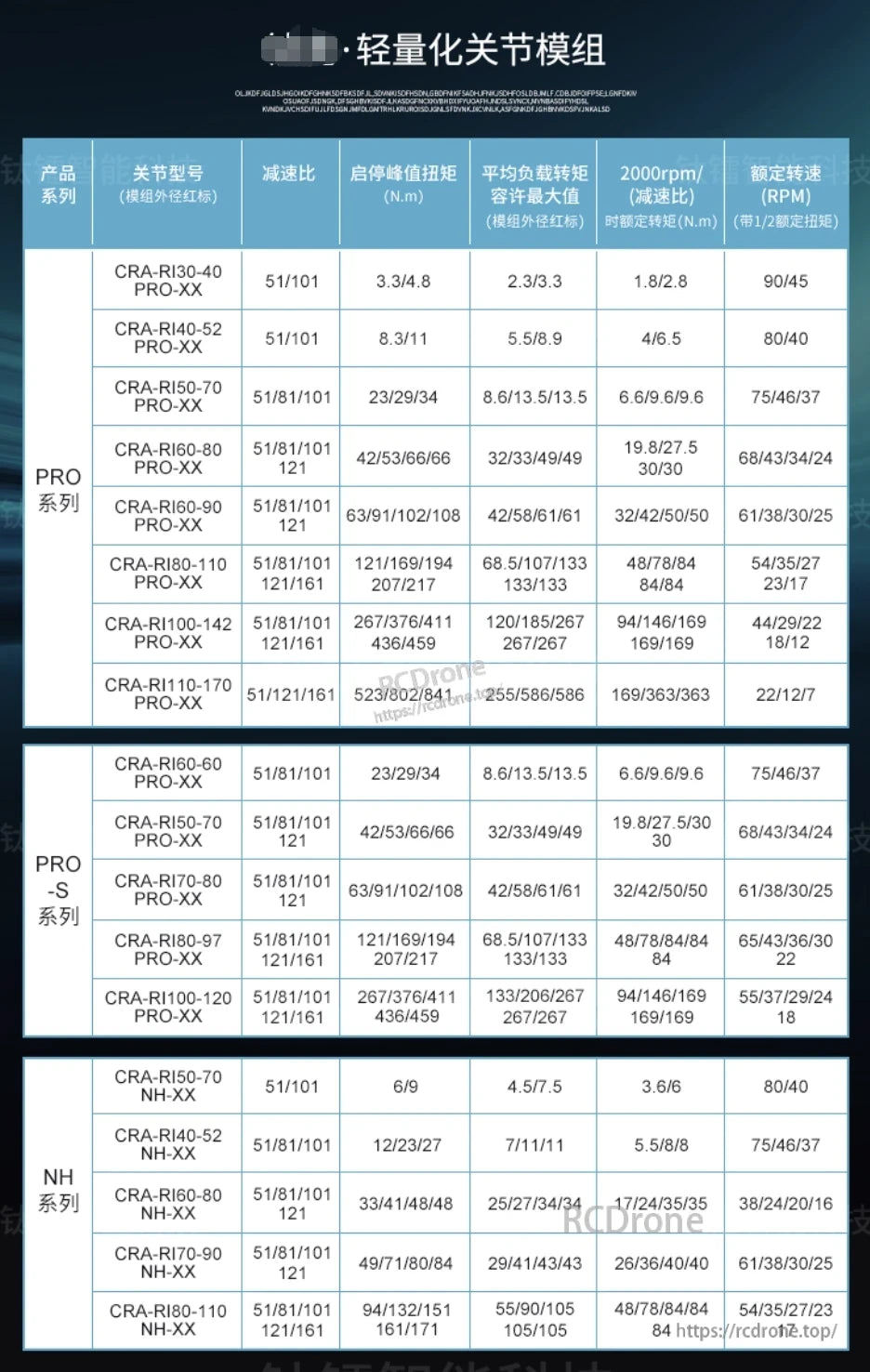
Lekkie moduły przegubowe z serii PRO, PRO-S i NH, o parametrach obejmujących przełożenia, maksymalny moment obrotowy, nośność, prędkość znamionową i moment obrotowy przy 2000 obr./min. Modele od CRA-RI30-40 do CRA-RI180-170.
Related Collections







