






CUAV Pixhawk V6X V2 Kontroler Drona dla PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
CUAV Pixhawk V6X V2 Kontroler Drona dla PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
CUAV
Nie można załadować gotowości do odbioru
Przegląd
CUAV Pixhawk V6X V2 to kontroler drona z serii Pixhawk, zaprojektowany dla oprogramowania autopilota PX4 i ArduPilot. Spełnia standard Pixhawk FMU v6x oraz filozofię modułowego projektowania, oferując ulepszone czujniki przemysłowe o podwójnej redundancji, zewnętrzny zegar o stałej temperaturze oraz projekt odprowadzania ciepła MCU, przełączanie poziomów PWM 5V/3.3V oraz opatentowaną strukturę amortyzacji wstrząsów. Standardowy moduł zarządzania zasilaniem PMU 2 Lite obsługuje 70V wejścia oraz 220A detekcję prądu.
Kluczowe cechy
- Jednostka zmiennoprzecinkowa podwójnej precyzji H7 (STM32H753IIK6); jednostka zmiennoprzecinkowa o podwójnej precyzji 480MHz; 2M pamięci Flash
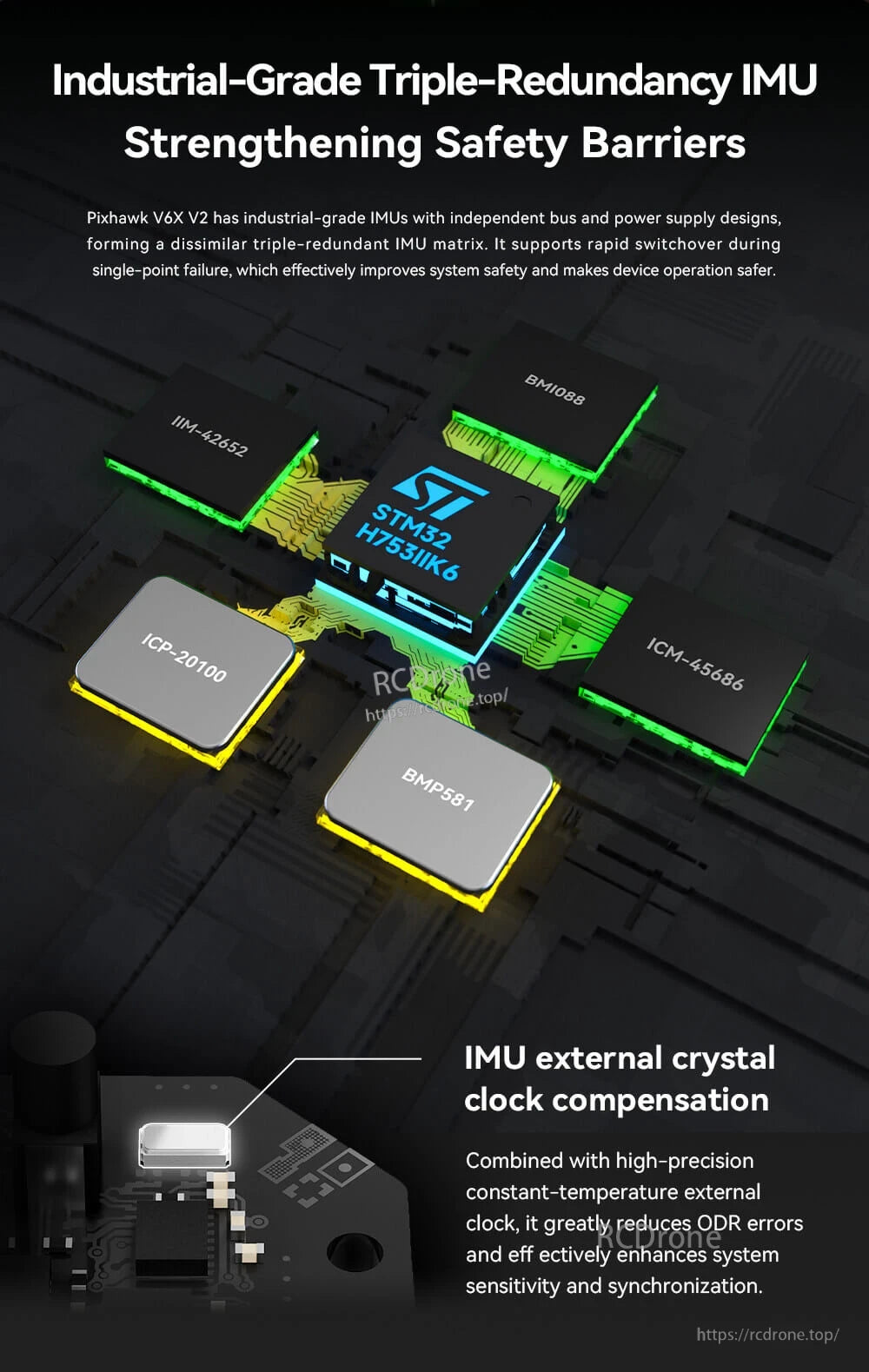
- Przemysłowej klasy macierz IMU z różnymi trzema redundantnymi systemami z niezależnym projektem magistrali i zasilania (IIM-42652, BMI088, ICM-45686)
- Połączony podwójnie redundantny barometr (BMP581, ICP-20100)
- System absorpcji wstrząsów rdzenia z trzema osiami (X, Y, Z); przechylony projekt wsparcia w czterech rogach; nowy typ materiału absorbującego wstrząsy
- Kompas magnetyczny RM3100 klasy motoryzacyjnej do skutecznego odrzucania zakłóceń magnetycznych
- Kompenacja zewnętrznego zegara kryształowego IMU (używana z wysokoprecyzyjnym zewnętrznym zegarem o stałej temperaturze w celu zmniejszenia błędów ODR i poprawy czułości oraz synchronizacji)
- System kontroli temperatury: silikon przewodzący ciepło i kompensacja temperatury IMU w celu zmniejszenia dryfu związanego z temperaturą
- Elastyczne oprogramowanie przełączające między 5V a 3.3V PWM poziomy wyjściowe
- Zintegrowany interfejs Ethernet 100 Mbps do synchronizacji danych z urządzeniami takimi jak komputery misji i kamery pomiarowe
- Obsługuje bezpieczne uruchamianie i usługi aktualizacji oprogramowania układowego
- Projekt zasilania wielokrotnego; obsługuje wejście PMU CAN 2-kanałowe; zawiera PMU 2 Lite jako standard
- Dodano otwory montażowe od spodu do bezpośredniego montażu na śruby; otwory montażowe kompatybilne z śrubami standardu M2
Specyfikacje
| Procesor | STM32H753IIK6 |
| Coprocesor | STM32F103 |
| Wersja | Pixhawk V6XV2 |
| CPU / pamięć (podana) | 480MHz jednostka zmiennoprzecinkowa podwójnej precyzji; 2M pamięci Flash |
| Akcelerometr & żyroskop | IIM-42652; BMI088; ICM-45686 |
| Kompas | RM3100 |
| Barometr | BMP581; ICP-20100 |
| PWM I/O | 16 |
| Poziom PWM | 3.3V / 5V (przełączanie programowe) |
| Zasilanie | 2 (2 interfejsy zasilania CAN) |
| Port GPS | 2 (GPS1: interfejs GPS z I2C i przełącznikiem bezpieczeństwa; GPS2: interfejs z I2C i GPS) |
| Port TELEM | 3 |
| Szyna CAN | 2 |
| PPM RC | 1 (dedykowane wejście dla odbiornika PPM) |
| SBUS/DSM/RSSI | 2 (1 wejście SBUS/DSM/Spektrum; 1 analogowe 3.3V/PWM wejście) |
| Wyjścia SBUS | 1 |
| Debug FMU | 1 |
| Debug IO | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI zewnętrzny 1 | 1 (interfejs SP16 do rozszerzenia czujników zewnętrznych) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| Port USB | 2 (Typ-C x1; interfejs GH x1 do zewnętrznego połączenia USB) |
| Karta TF | 1 |
| Moduł zasilania | Standardowy PMU 2 Lite (wersja 5V), napięcie wejściowe: 12-70V |
| Napięcie robocze | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Moc: 4.85-5.45V |
| Temperatura pracy | -20 do 85C |
| Rozmiar | 45 x 85.1 x 29.2 mm |
| Waga | Kontroler: 97.9g; Rdzeń: 43.1g; Płyta nośna (w tym śruby): 54.8g |
| Uwaga montażowa (tekst diagramu) | Otwory montażowe kompatybilne z standardowymi śrubami M2; wymiary pokazane: 72 mm; 22.50 mm; 24 mm |
Co jest w zestawie
- Pixhawk V6X V2 x1
- Moduł zasilania CAN PMU 2 Lite 5V x1
- Kabel zasilający PMU 2 Lite-5V (wersja X7+ (V6X)), długość przewodu: 25cm x1
- Płytka rozszerzeń CAN/I2C x1
- Karta pamięci TF x1
- Kabel Type-C, długość przewodu: 100cm x1
- Kabel DSM RC, długość przewodu: 30cm x1
- Kabel SBUS RC, długość przewodu: 30cm x1
- Kabel PPM RC/SBUS OUT, długość przewodu: 30cm x1
- Kabel Ethernet, długość przewodu: 40cm x1
- Kabel CAN, długość przewodu: 30cm x1
- Kabel TELEM, długość przewodu: 30cm x1
- Kabel UART 4, długość przewodu: 30cm x1
- Kabel UART4 -> Kabel I2C, długość przewodu: 30cm x1
- Kabel ADIO, długość przewodu: 30cm x1
- Kabel debugowania, długość przewodu: 10cm x1
- Kabel przedłużający USB -> Złącze żeńskie Type-C, długość przewodu: 50cm x1
- 3M Taśma dwustronna x2
Aplikacje
- Kompatybilne z ArduPilot i PX4
- Obsługuje wielowirnikowce, samoloty o stałym skrzydle, VTOL o stałym skrzydle, bezzałogowe helikoptery, bezzałogowe pojazdy i bezzałogowe statki (podwodne)
- Synchronizacja danych Ethernet o wysokiej prędkości z komputerami misji i innymi urządzeniami pokładowymi, gdzie to możliwe
Aby sprawdzić zgodność i zadać pytania dotyczące konfiguracji, skontaktuj się z [email protected] lub odwiedź https://rcdrone.top/.
Wideo
Szczegóły

Kontroler lotu Pixhawk V6X V2 wykorzystuje procesor H7 i oferuje potrójnie redundantny IMU, podwójny barometr oraz kompas RM3100 z konstrukcją amortyzującą.

Pixhawk V6X V2 wykorzystuje procesor STM32H753IIK6 H7, aby wspierać konfiguracje sterowania lotem oparte na PX4 i ArduPilot.

Pixhawk V6X V2 korzysta z uchwytu amortyzującego w trzech osiach (X, Y, Z) z czterema nachylonymi podporami w rogach, aby pomóc w redukcji wibracji i hałasu.
Projekt kontrolera lotu Pixhawk V6X V2 charakteryzuje się potrójnie redundantnym układem IMU wokół STM32H753IIK6, a także zewnętrzną kompensacją zegara kryształowego dla synchronizacji sensorów.

Pixhawk V6X V2 integruje magnetometr RM3100 klasy motoryzacyjnej i wspiera określanie kierunku GPS dla bardziej stabilnej orientacji i nawigacji.
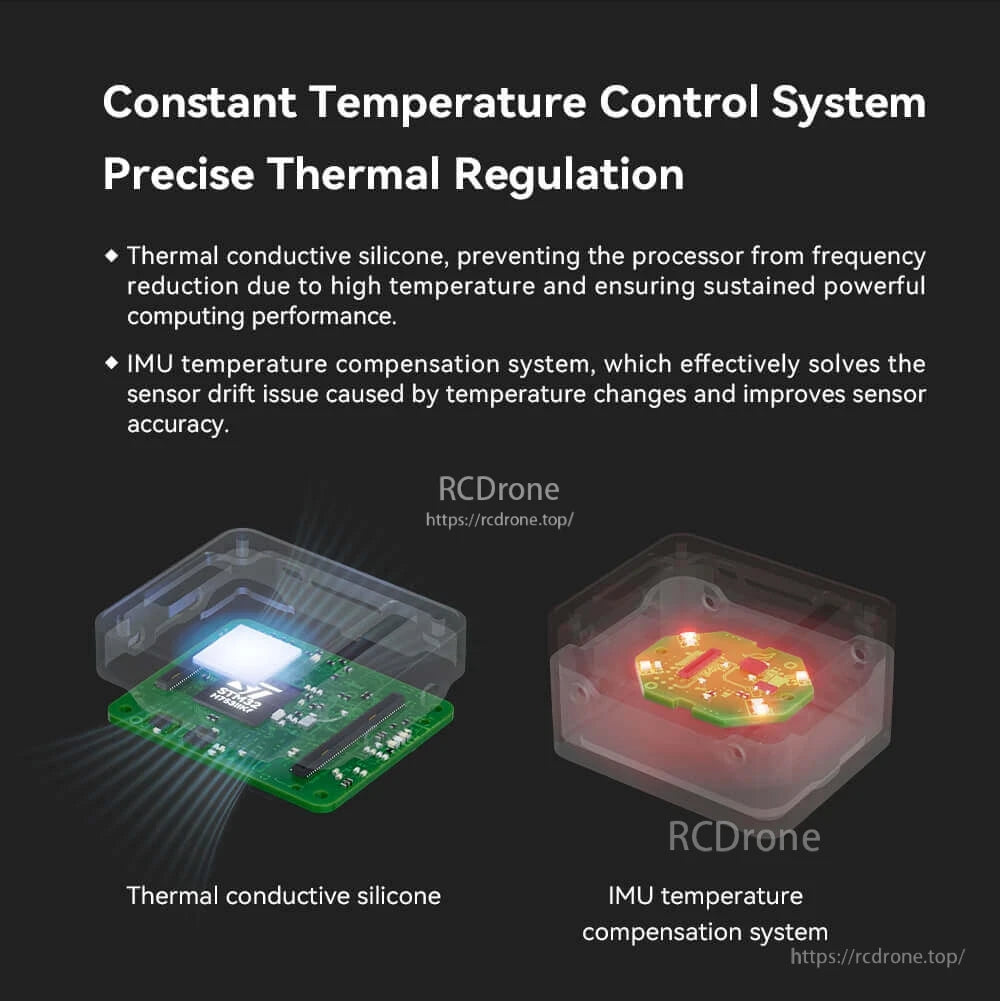
System kontroli temperatury o stałej temperaturze wykorzystuje silikon przewodzący ciepło oraz kompensację temperatury IMU, aby zredukować dryf związany z temperaturą.
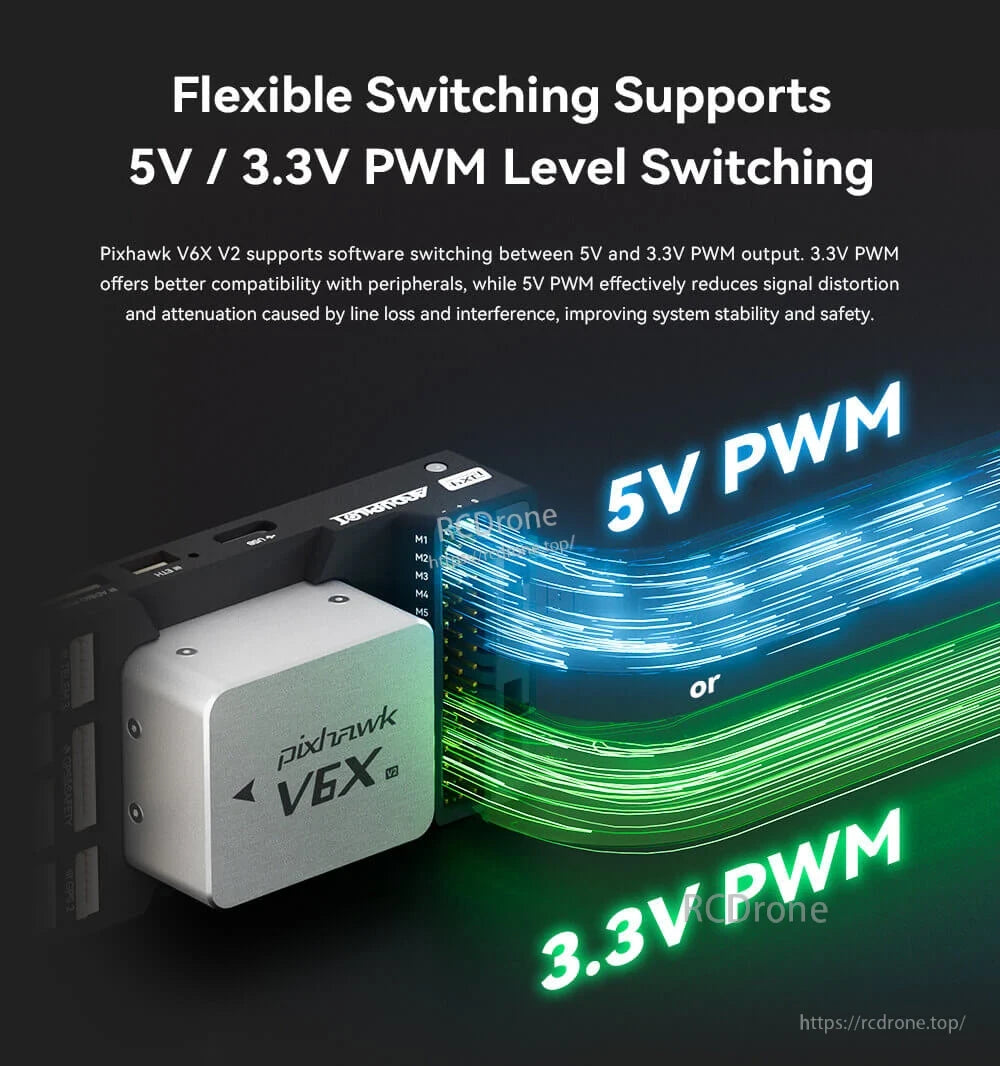
Pixhawk V6X V2 wspiera elastyczne przełączanie między poziomami wyjścia PWM 5V i 3.3V, co ułatwia kompatybilność z różnymi peryferiami.

Pixhawk V6X V2 integruje interfejs Ethernet 100 Mbps obok oznaczonych portów, takich jak USB, TELEM3, CAN i GPS & Bezpieczeństwo dla czystego okablowania.
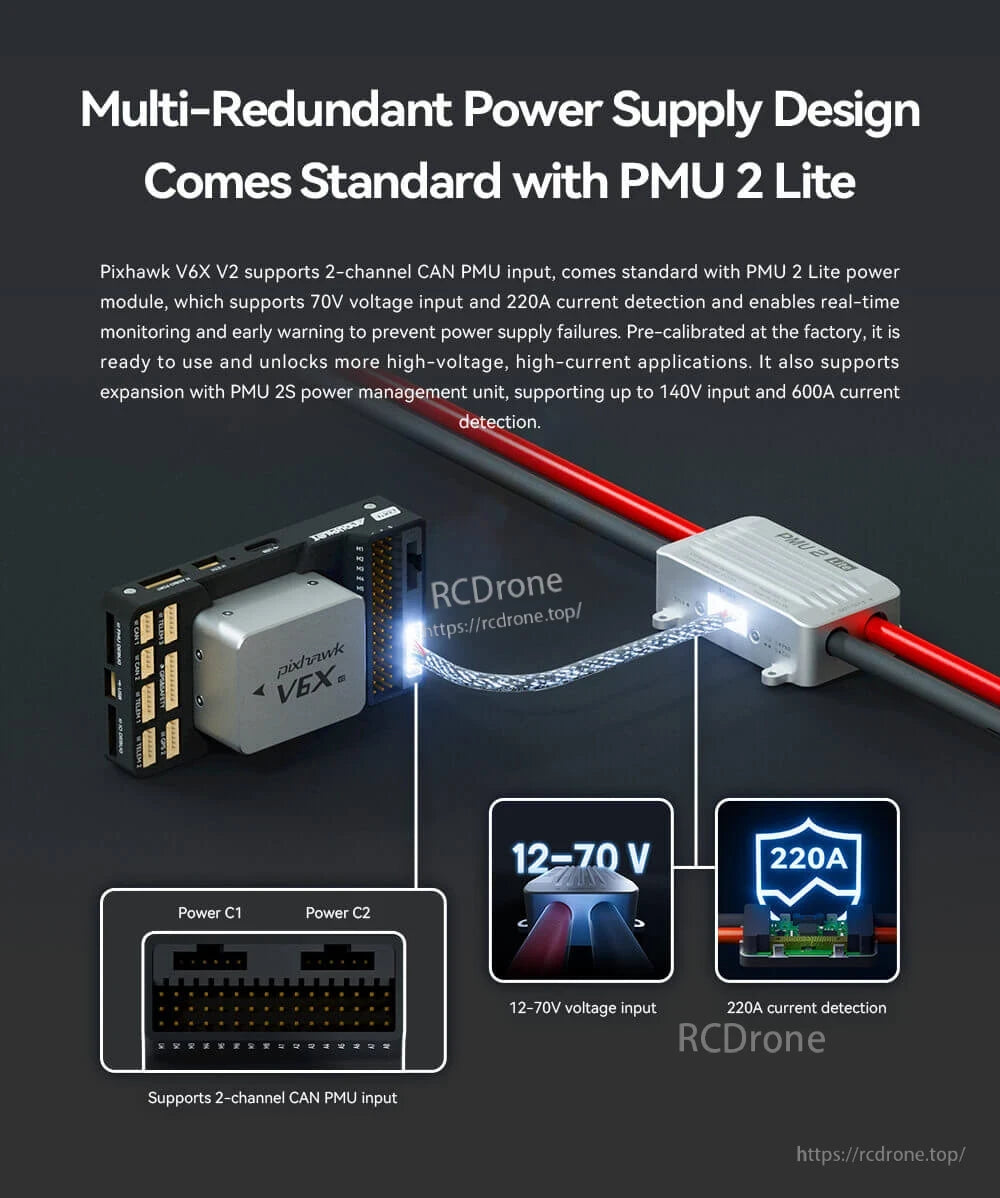
Pixhawk V6X V2 współpracuje z modułem PMU 2 Lite dla wielokrotnego zasilania redundantnego, wspierającym wykrywanie prądu 12–70V i 220A.

CUAV Pixhawk V6X V2 wykorzystuje moduł rdzeniowy w formie modułowej, odłączany na płycie nośnej, aby uprościć dostosowywanie i dostęp do złączy.
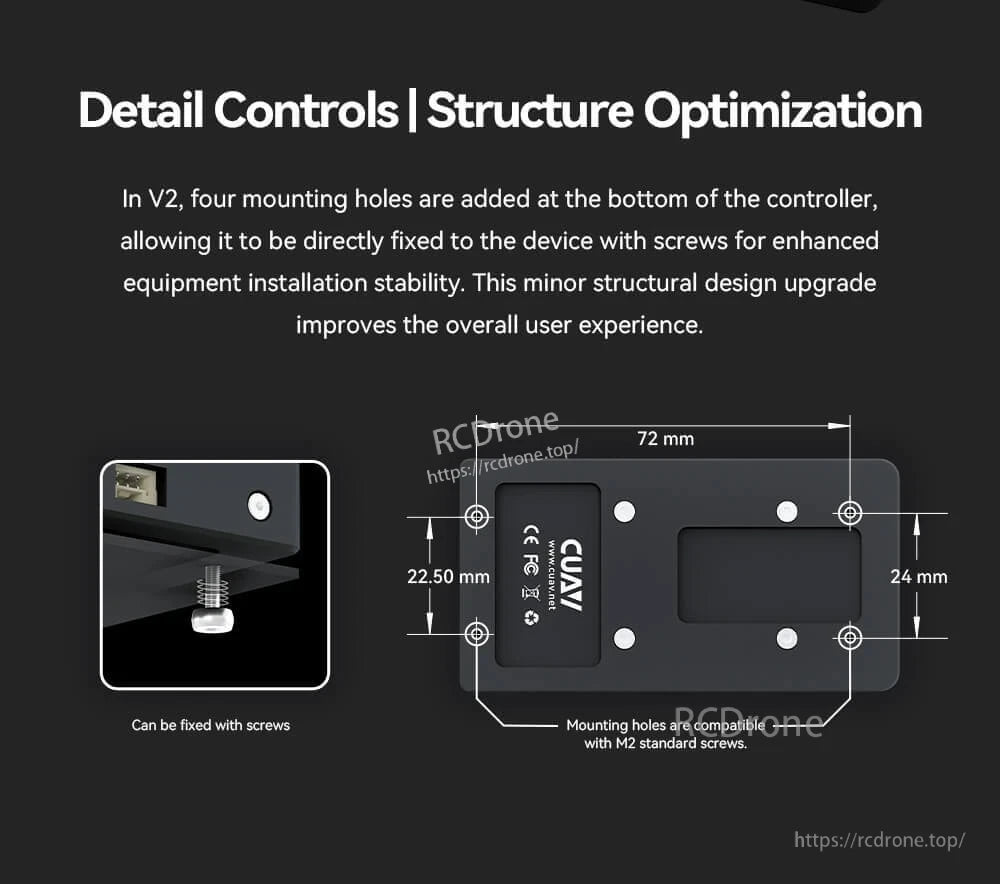
CUAV Pixhawk V6X V2 dodaje cztery otwory montażowe M2 kompatybilne z dolnym montażem o rozstawie 72 mm dla bardziej bezpiecznej instalacji na wkręty.

Pixhawk V6X V2 obsługuje oprogramowanie ArduPilot i PX4 dla różnych platform bezzałogowych, w tym multirotorów, samolotów o stałym skrzydle oraz pojazdów lądowych i morskich.
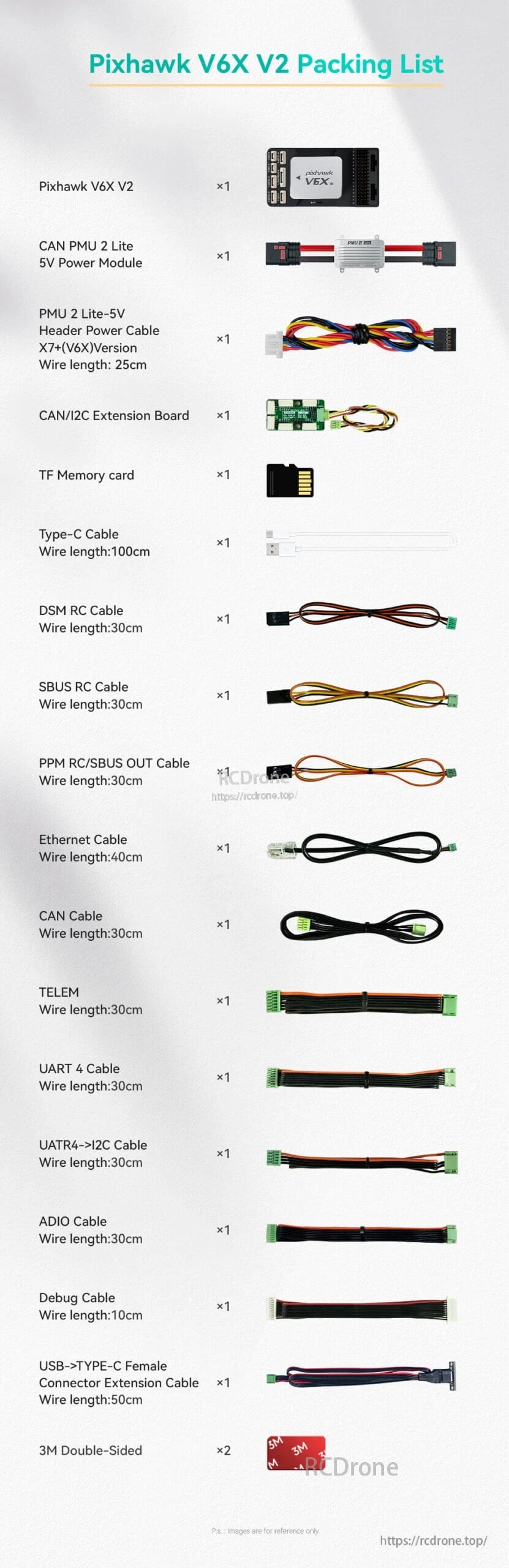
Zestaw Pixhawk V6X V2 zawiera kontroler lotu, moduł zasilania CAN PMU 2 Lite 5V, kartę pamięci TF oraz zestaw kabli Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO i debug.
Related Collections


















