CUAV V5+ Płyta nośna Autopilot Pixhawk Kontroler lotu - FPV RC Drone Quadcopter Helikopter VTOL
CUAV V5+ Płyta nośna Autopilot Pixhawk Kontroler lotu - FPV RC Drone Quadcopter Helikopter VTOL
CUAV
Nie można załadować gotowości do odbioru
CUAV V5+ Płytka nośna Autopilota Pixhawk Kontroler lotu SPECYFIKACJE
Rozstaw osi: Płyta dolna
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Uaktualnij części/akcesoria: Kontroler lotu
Materiały narzędziowe: Kategoria montażu
Parametry techniczne: KV1100
Rozmiar: 89*42,5*33mm
Urządzenia peryferyjne/urządzenia do zdalnego sterowania: Pilot zdalnego sterowania
Zalecany wiek: 14+lat
Części i akcesoria do zdalnie sterowanych pojazdów: Kontrolery prędkości
Ilość: 1 szt.
Pochodzenie: Chiny kontynentalne
Numer modelu: V5+
Materiał: Metal
Atrybuty napędu na cztery koła: Powłoka/podwozie/skrzydło/głowica
Dla typu pojazdu: Śmigłowce
Certyfikat: CE,FCC
Nazwa marki: CUAV
CUAV V5 + płyta nośna autopilot Pixhawk kontroler lotu dla FPV RC Drone Quadcopter helikopter symulator lotu VTOL
V5 + AutoPilot
AutoPilot V5+ to zaawansowany autopilot dla integratorów akademickich i komercyjnych. Zaprojektowany przez CUAV we współpracy z zespołem PX4. Wysoce modułowa płyta oparta na konstrukcji otwartego sprzętu Pixhawk FMUv5, wykorzystująca standardowe piny Pixhawk w interfejsie zewnętrznym, umożliwiająca integrację z płytą nośną. Od razu po wyjęciu z pudełka preinstalowany autopilot PX4 Open Source i w pełni obsługiwany przez ArduPilot.
Szybkie podsumowanie
Główny procesor FMU: STM32F765
32-bitowy Arm® Cortex®-M7, 216 MHz, 2 MB pamięci, 512 KB RAM
Procesor IO: STM32F100
32-bitowy Arm® Cortex®-M3, 24 MHz, 8 KB SRAM
Czujniki pokładowe:
Akcelerometr/Żyroskop: ICM-20689
Akcelerometr/Żyroskop: BMI055
Magnetometr: IST8310
Barometr: MS5611
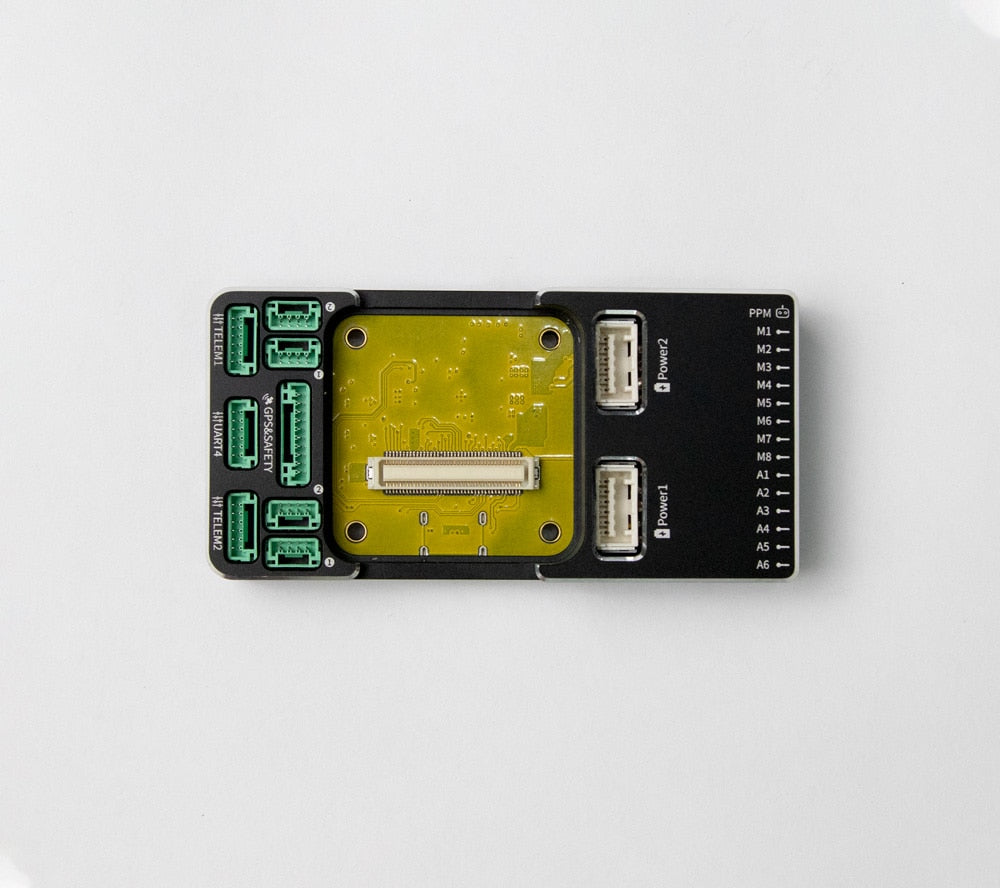
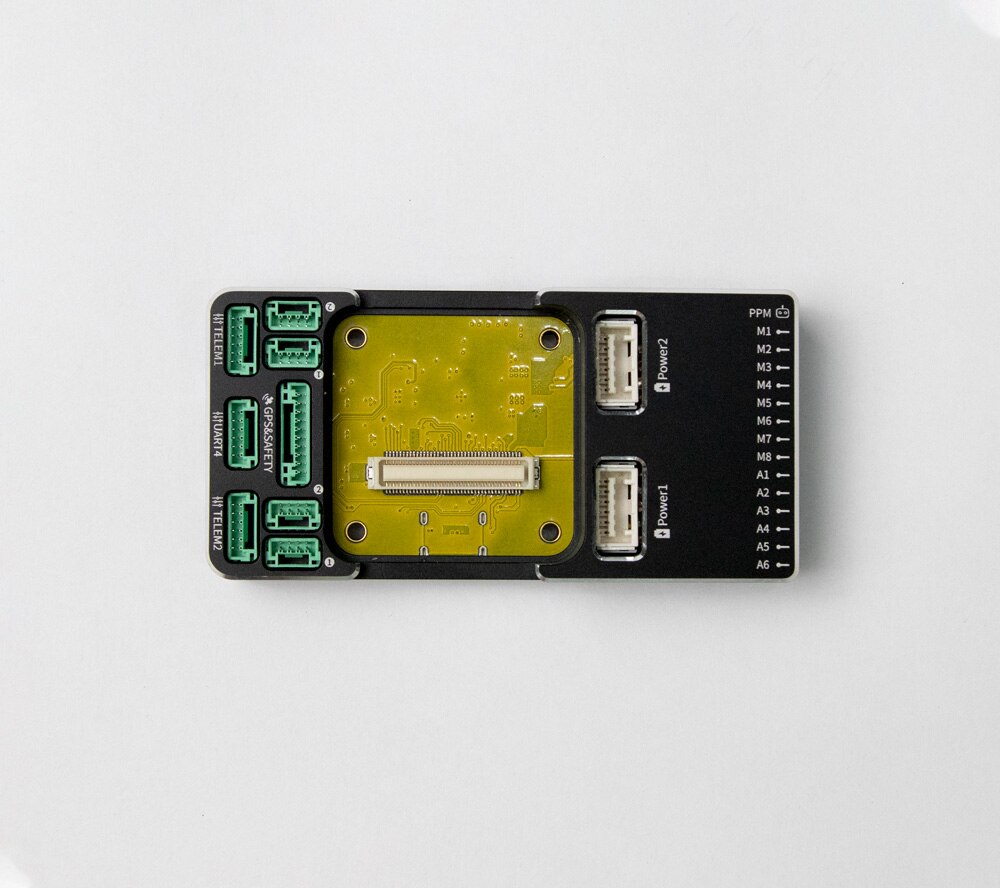
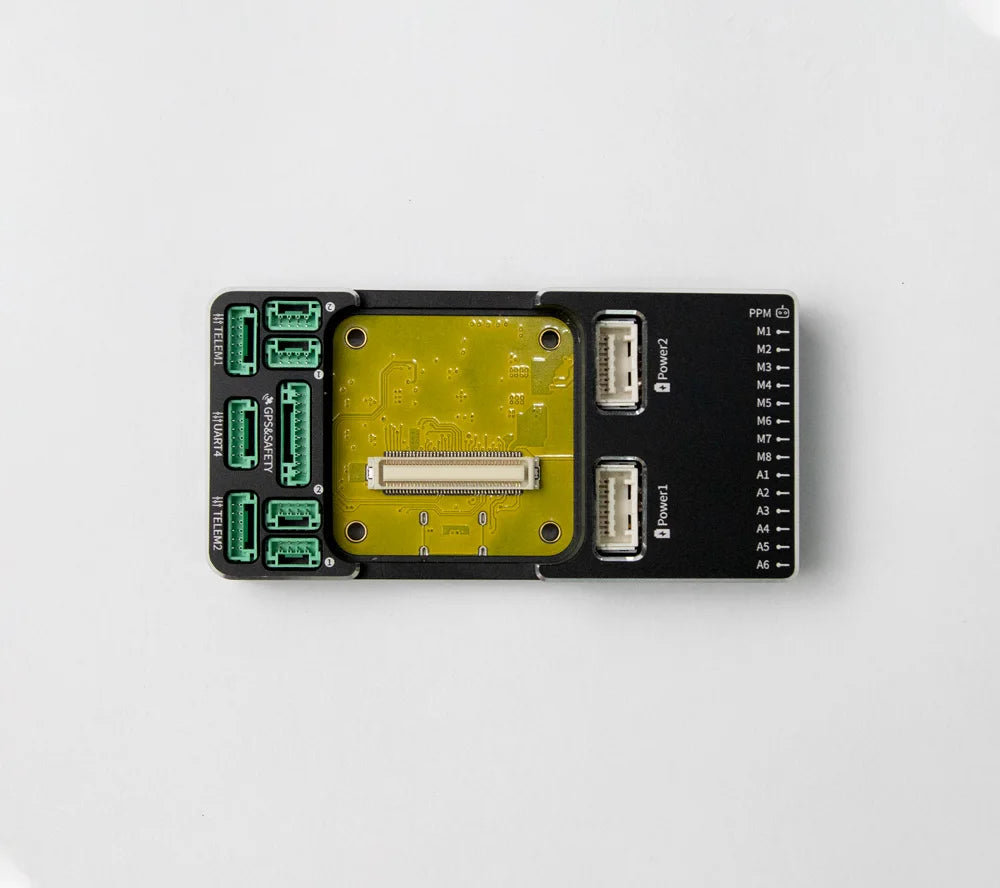
Interfejsy:
8-14 wyjść PWM (6 z IO, 8 z FMU)
3 dedykowane wejścia PWM/Capture na FMU
Dedykowane wejście R/C dla CPPM
Dedykowane wejście R/C dla PPM i S.Bus
wejście analogowe / PWM RSSI
Wyjście serwa S.Bus
5 portów szeregowych ogólnego przeznaczenia
4 porty I2C
4 magistrale SPI
2 magistrale CANBus z szeregowym ESC
Wejścia analogowe dla napięcia/prądu 2 akumulatorów
System zasilania:
Moc: 4,3~5,4V
Wejście USB: 4,75~5,25V
Wejście szyny serwa: 0~36V
Waga i wymiary:

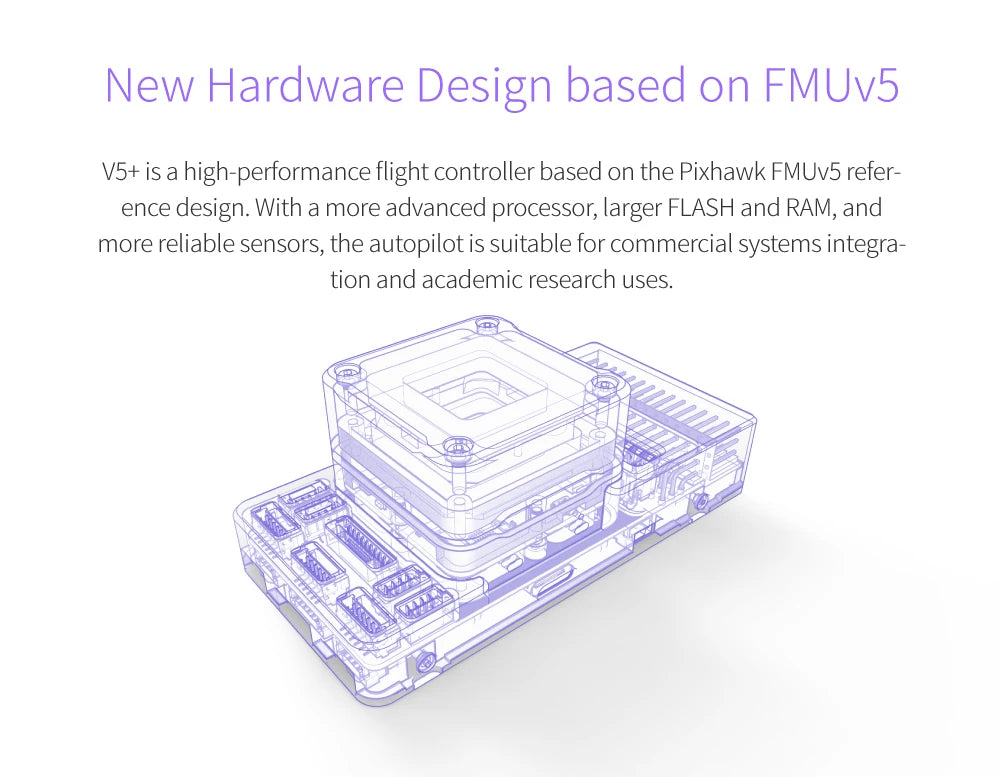
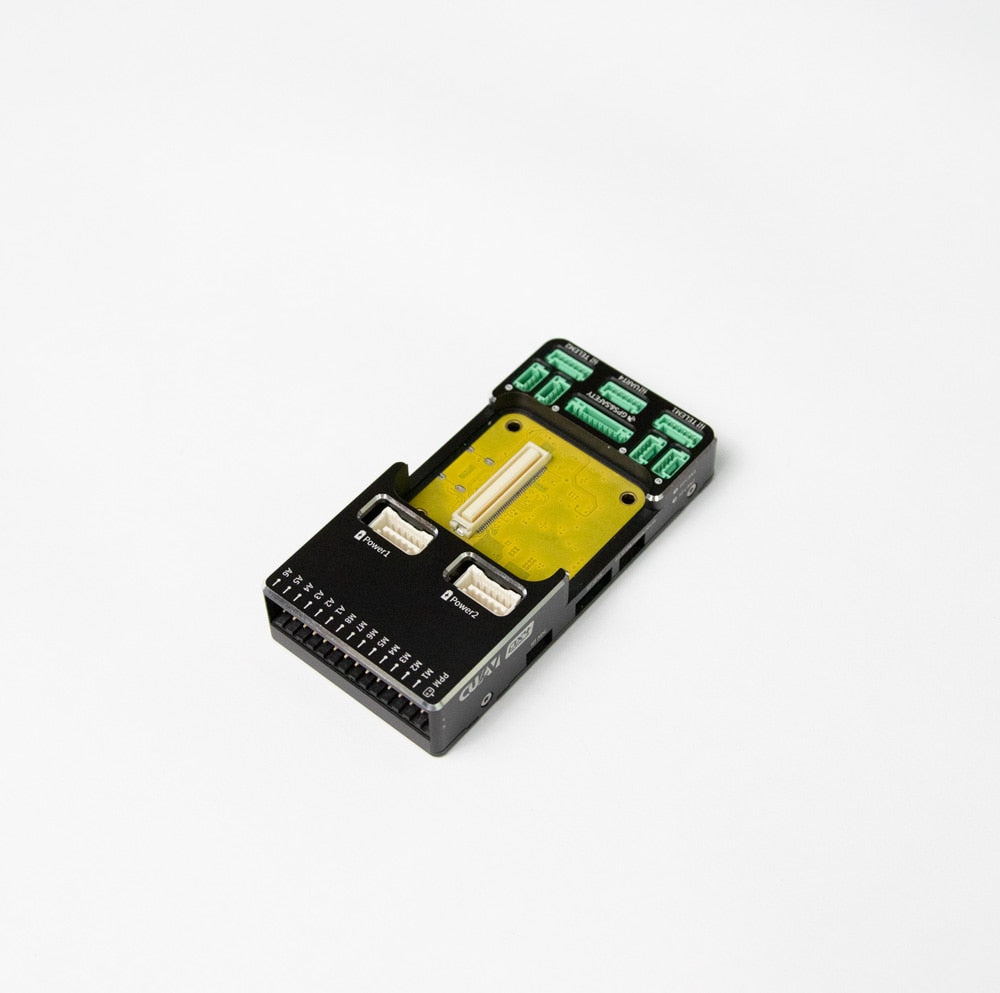
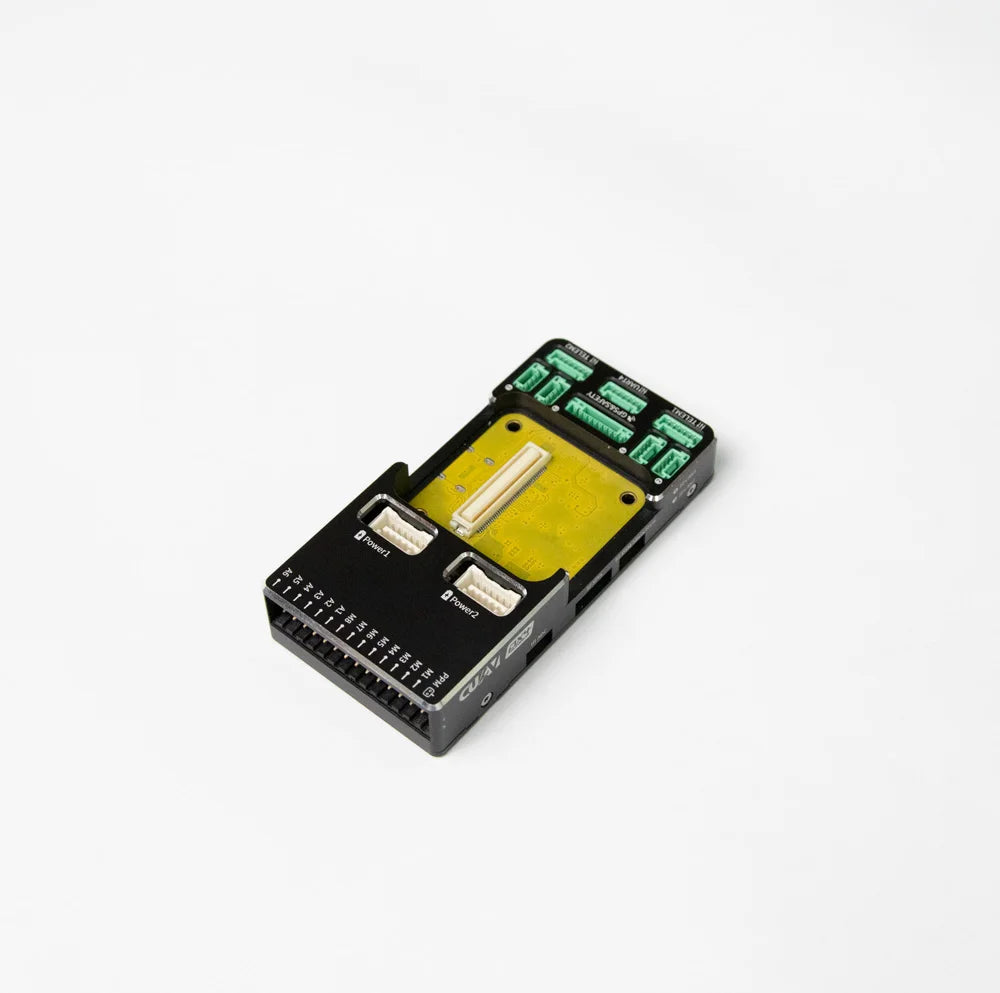
Autopilot Pixhawk Flight Controller CUAV V5+ Carrier Board to wysokowydajny kontroler lotu oparty na Pixhawk FMUv5 VS+, wyposażony w zaawansowany procesor, zwiększoną pojemność FLASH i RAM oraz bardziej niezawodne czujniki. Ten autopilot jest przeznaczony do integracji systemów komercyjnych i zastosowań w badaniach akademickich.

Odłączana konstrukcja rdzenia CUAV V5+ ma modułową obudowę, co pozwala na łatwą integrację z różnymi projektami.Zestaw zawiera zarówno moduł podstawowy, jak i listwę przypodłogową, które można zainstalować bezpośrednio w wybranej aplikacji.
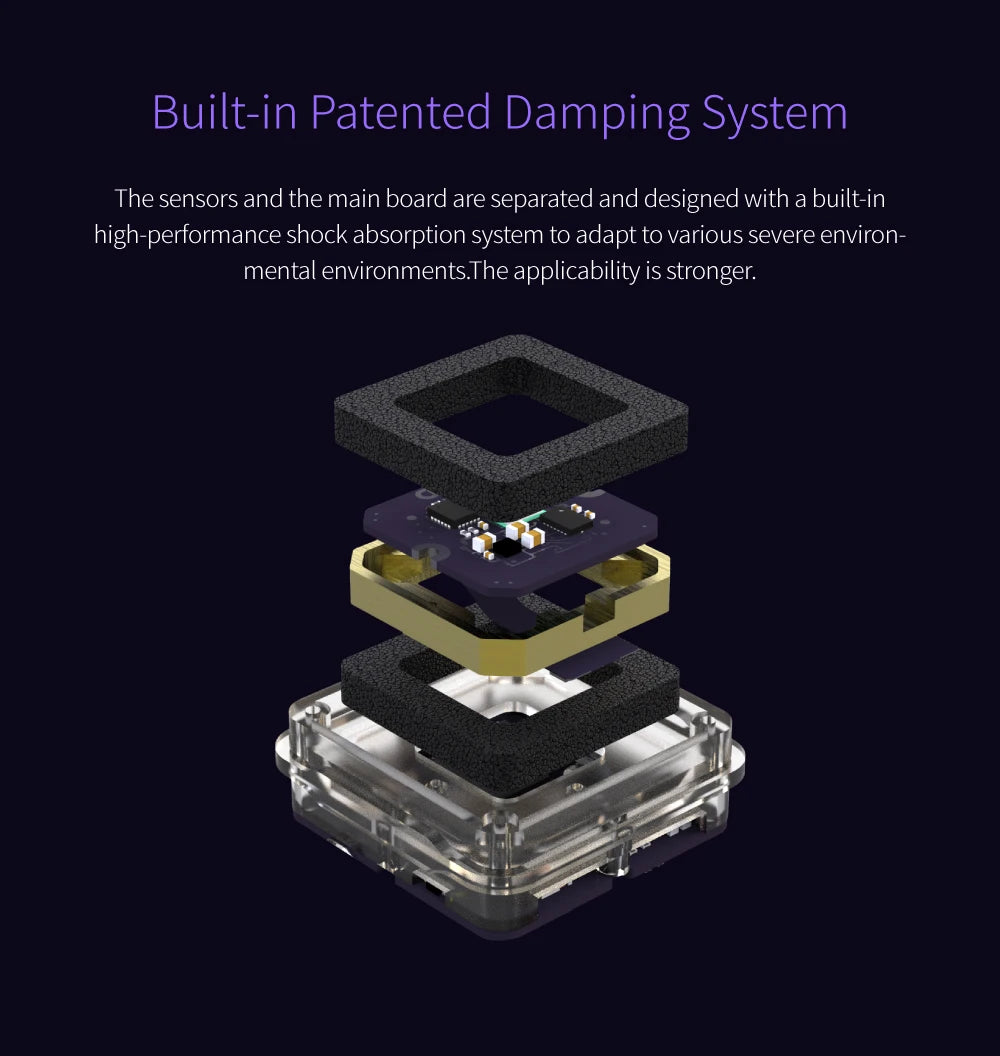
CUAV V5+ ma wbudowany system amortyzacji zaprojektowany tak, aby wytrzymywał różne ekstremalne warunki środowiskowe, zapewniając zwiększoną wytrzymałość i niezawodność.
CUAV jest srebrnym członkiem Dronecode; i zaangażował się w promowanie projektu open source PX4. Interfejsy iX4 OUTOPiLOT zostały zaprojektowane zgodnie z oficjalnymi standardami, aby zapewnić kompatybilność i interoperacyjność.
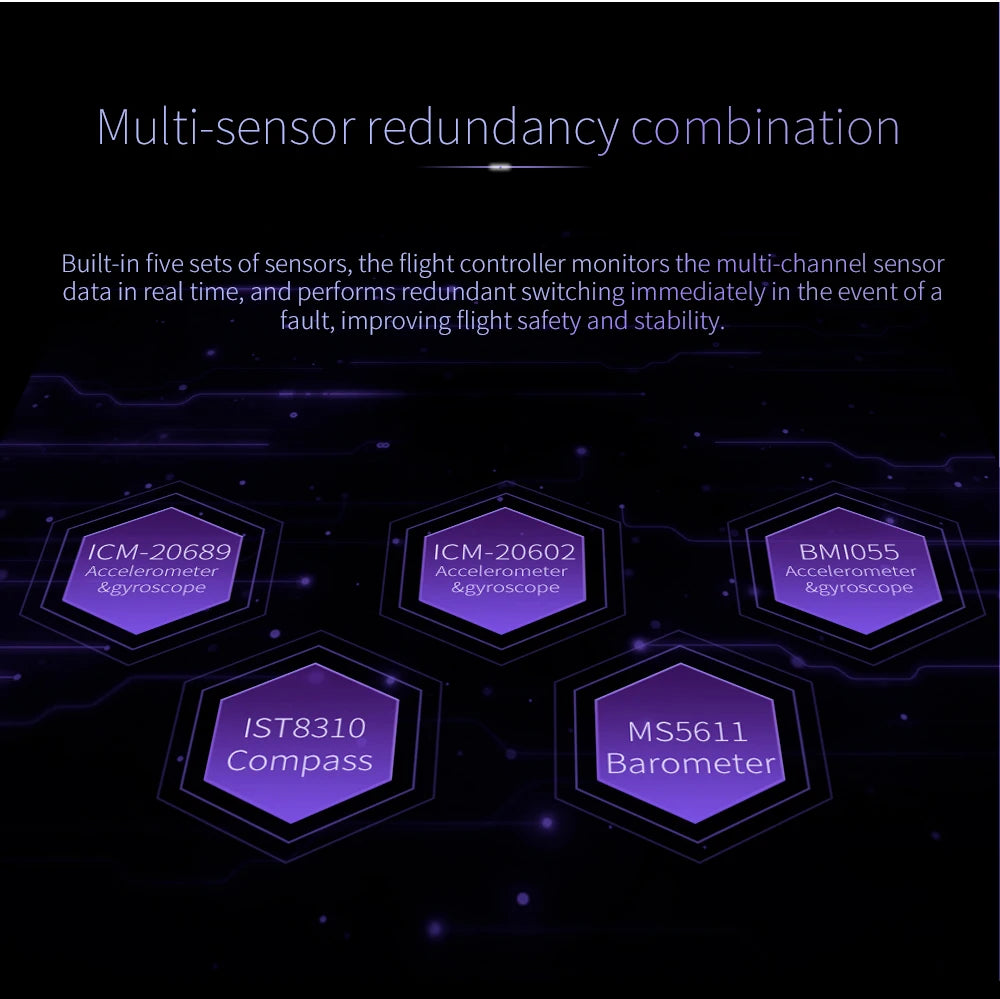
kontroler lotu monitoruje dane z wielokanałowych czujników w czasie rzeczywistym. w przypadku awarii natychmiast wykonuje redundantne przełączanie. poprawa bezpieczeństwa i stabilności lotu.
VS+ wybiera szybszy procesor STM3ZF 765 o lepszej wydajności. częstotliwość zegara jest wyższa; pamięć RAM jest większa; a prędkość zostanie znacznie poprawiona.
Kontroler lotu CUAV V5+ obsługuje pozycjonowanie kinematyczne w czasie rzeczywistym (RTK), umożliwiając dokładną nawigację na poziomie centymetra i precyzyjne sterowanie w połączeniu z modułem RTK (sprzedawanym osobno).



Jestem bardzo zadowolony z wysokiej jakości, jakiej zwykle oczekuję od tego niezawodnego sklepu! Data mojego zamówienia to 29 czerwca 2021 r. o godzinie 5:19, a przesyłka dotarła za pośrednictwem standardowej wysyłki AliExpress 1 lipca 2021 r. o godzinie 4:17. Jeszcze raz dziękuję za tablicę nośną VSPlus, która jest solidnie zbudowana i świetnie wygląda w CZARNYM kolorze.
Related Collections