








CUAV X25 EVO Autopilot Flight Controller - STM32H7, potrójny IMU, podwójny barometr, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV X25 EVO Autopilot Flight Controller - STM32H7, potrójny IMU, podwójny barometr, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV
Nie można załadować gotowości do odbioru
Przegląd
CUAV X25 EVO to kontroler rdzeniowy o wysokiej niezawodności dla systemów bezzałogowych. Łączy procesor STM32H7 (480 MHz, 2 MB Flash) z potrójną przemysłową macierzą IMU, podwójnymi barometrami oraz magnetometrami RM3100. Przebudowana architektura zasilania obsługuje 10–18 V wejścia i zapewnia do 5 V/12 A zewnętrznego wyjścia do zasilania ciężkich ładunków. Kontroler integruje podwójną ścieżkę redundancji zasilania, kompleksową ochronę ESD/przeciążeniową, wskaźnik statusu RGB oraz modułowy design CORE/nośnika. Jest kompatybilny z ArduPilot i PX4, i nadaje się do multirotorów, samolotów o stałym skrzydle, VTOL, helikopterów, UGV/USV/UUV oraz innych platform.
Kluczowe cechy
-
Wydajność obliczeniowa: STM32H7 @ 480 MHz, 2 MB Flash; niski margines użycia CPU dla zaawansowanych algorytmów (nawigacja bez GPS, filtry FFT, skrypty LUA).
-
Zestaw czujników przemysłowych:
-
IMU: 2× TDK IIM-42653 (±4000 °/s, ±32 g) + 1× TDK IIM-42652 (±2000 °/s, ±16 g).
-
Magnetometry: PNI RM3100 (odporne na zakłócenia).
-
Barometry: TDK ICP20100 & Bosch BMP581 (podwójne).
-
Heterogeniczna macierz IMU z przełączaniem odpornym na błędy.
-
-
System kompensacji temperatury dualnej dla IMU: kompensacja w czasie rzeczywistym ±0.5 °C; w porównaniu do poprzedniej generacji—15% mniejszy dryf temperatury, 25% lepsza spójność rozwiązania orientacji.
-
Izolacja wibracji: 4. generacja nachylonej symetrycznej matrycy nylonowej; opcjonalne zewnętrzne izolatory stałe do tłumienia nieprawidłowych wibracji o wysokiej częstotliwości i poprawy wierności danych.
-
Architektura zasilania: wbudowany 5 V/15 A wysokoprądowy DC-DC; zewnętrzny port obsługuje 5 V/12 A wyjście; zakres wejściowy 10–18 V.
-
Sieci &i magistrale: CAN bus (inteligentna bateria/ESC/serwomechanizmy, sprzężenie zwrotne telemetryczne) + 100 M Ethernet.
-
Obfite I/O: do 16 PWM przez porty serwo; do 32 PWM przez rozszerzenie CAN.
-
Wzmocnienie &i QA: podwójna redundancja zasilania, ESD &i ochrona przed przeciążeniem, projekt złącza antystatycznego, conformal coating PCB oraz w pełni zautomatyzowane testy.
-
Wskaźnik statusu RGB: wielokolorowe diody LED do uzbrajania, zasilania, GNSS/pozycji, trybów awarii itp.
Specyfikacje
| Kategoria | Szczegóły |
|---|---|
| Procesor | STM32H7 Arm® Cortex®-M7 @ 480 MHz, 2 MB Flash |
| Wersja | X25 EVO |
| IMU | IIM-42653 ×2 (żyroskop ±4000 °/s; akcelerometr ±32 g); IIM-42652 ×1 (żyroskop ±2000 °/s; akcelerometr ±16 g) |
| Magnetometr | RM3100 |
| Barometry | TDK ICP20100 / Bosch BMP581 (podwójny) |
| Wyjścia PWM | 16 (bank serw M1–M16) |
| Wejścia zasilania (CAN) | 2 |
| Porty GPS | 2 |
| Porty TELEM | 2 |
| UART4 | 1 |
| Wejście RC | 1 (PPM / SBUS / DSM itd.) |
| DEBUG (DSU) | 1 |
| Ethernet | 1 (100 M) |
| CAN | CAN1 ×3, CAN2 ×2 (łącznie 5) |
| rozszerzenie SPI6 | 1 |
| ADC | 1× 3V3, 1× 6V6 |
| USB | 1× Type-C |
| I²C | 3 |
| RSSI | 1 |
| Moduł zasilania | PMU 2 Lite |
Warunki pracy &i fizyczne
| Przedmiot | Wartość |
|---|---|
| Napięcie wejściowe (kontroler) | 10–18 V |
| USB | 4.75–5.25 V |
| Zakres zasilania PMU 2 Lite | 20–70 V |
| Zewnętrzna szyna 5 V | do 12 A wyjścia (dla peryferiów/ciężkich ładunków) |
| Temperatura pracy | −20 °C do +85 °C |
| Wymiary | 76.5 × 45.45 × 32.2 mm |
| Waga | 110 g |
Interfejsy &i Podkreślenia układu
-
Podwójne SZYNY ZASILANIA C1/C2, RC IN, bank serw M1–M16.
-
Złącza boczne dla UART/TELEM, ADC, USB-C (debug/IO), I²C, CAN1/CAN2, ETH.
-
Zapewnia detali CORE, który można odłączyć do rozwoju niestandardowej płyty nośnej.
Kompatybilność &i aplikacje
-
Oprogramowanie: w pełni kompatybilne z ArduPilot i PX4 (sterowniki &i funkcje).
-
Pojazdy: multirotorowe, o stałym skrzydle, VTOL, śmigłowce, UGV, USV, UUV/podwodne, oraz inne platformy bezzałogowe.
W zestawie (Zestaw X25 EVO)
-
X25 EVO kontroler lotu × 1
-
Moduł zasilania CAN PMU2 Lite (15 V) × 1
-
Płytka rozszerzeń CAN × 1
-
Kable danych CAN (35 cm) × 2
-
Kabel USB typu C (100 cm) × 1
-
Kable TELEM (30 cm) × 2
-
Kabel RSSI (22 cm) × 1
-
Kabel RC IN (30 cm) × 1
-
Kabel zasilający inteligentnego kontrolera CAN PMU2 Lite 15 V (30 cm) × 1
Szczegóły

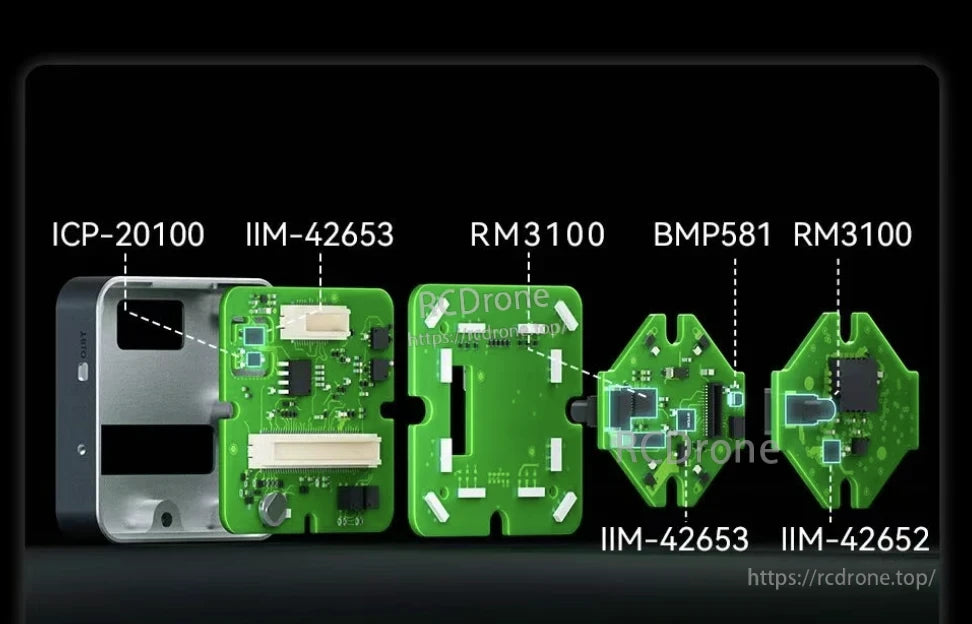
Komponenty kontrolera lotu CUAV X25 EVO oznaczone modelami chipów.


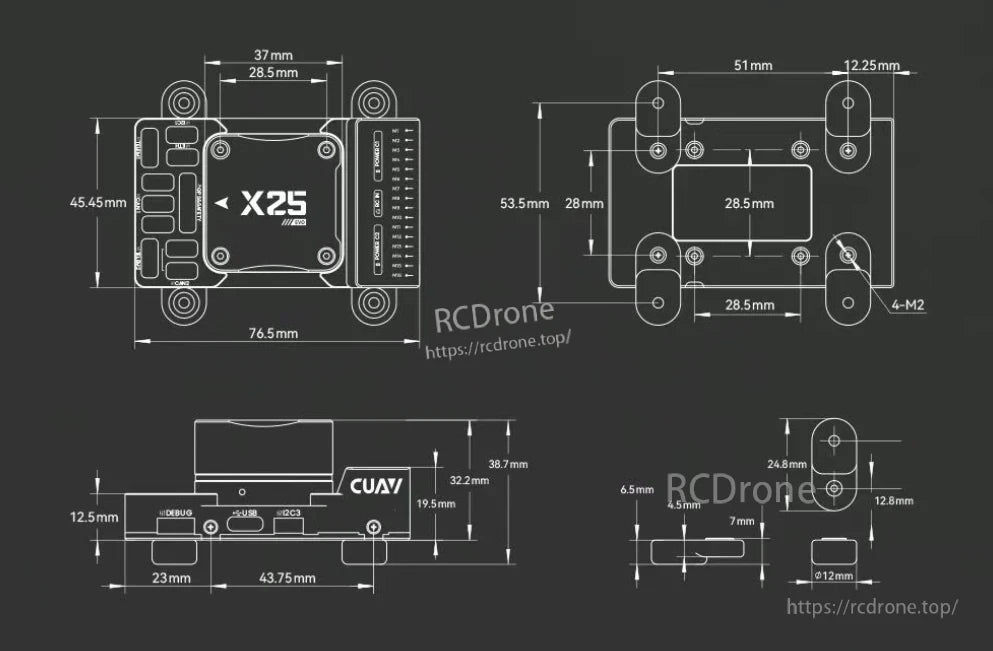
Kontroler lotu CUAV X25 EVO ma wymiary 76,5 mm x 45,45 mm, posiada porty debug, USB i I2C3 oraz zawiera cztery śruby M2 do bezpiecznego montażu.

X25 EVO Autopilot zawiera kontroler lotu, moduł zasilania, płytkę rozszerzeń CAN, kable danych i telemetrii, kabel typu C, przewody RSSI i RC IN oraz linię zasilającą.
Related Collections








