






Kontroler lotu CUAV X7 Plus-Open Source dla APM PX4 Pixhawk FPV puszczania samolotów RC UAV Drone Quadcopter
Kontroler lotu CUAV X7 Plus-Open Source dla APM PX4 Pixhawk FPV puszczania samolotów RC UAV Drone Quadcopter
CUAV
Nie można załadować gotowości do odbioru
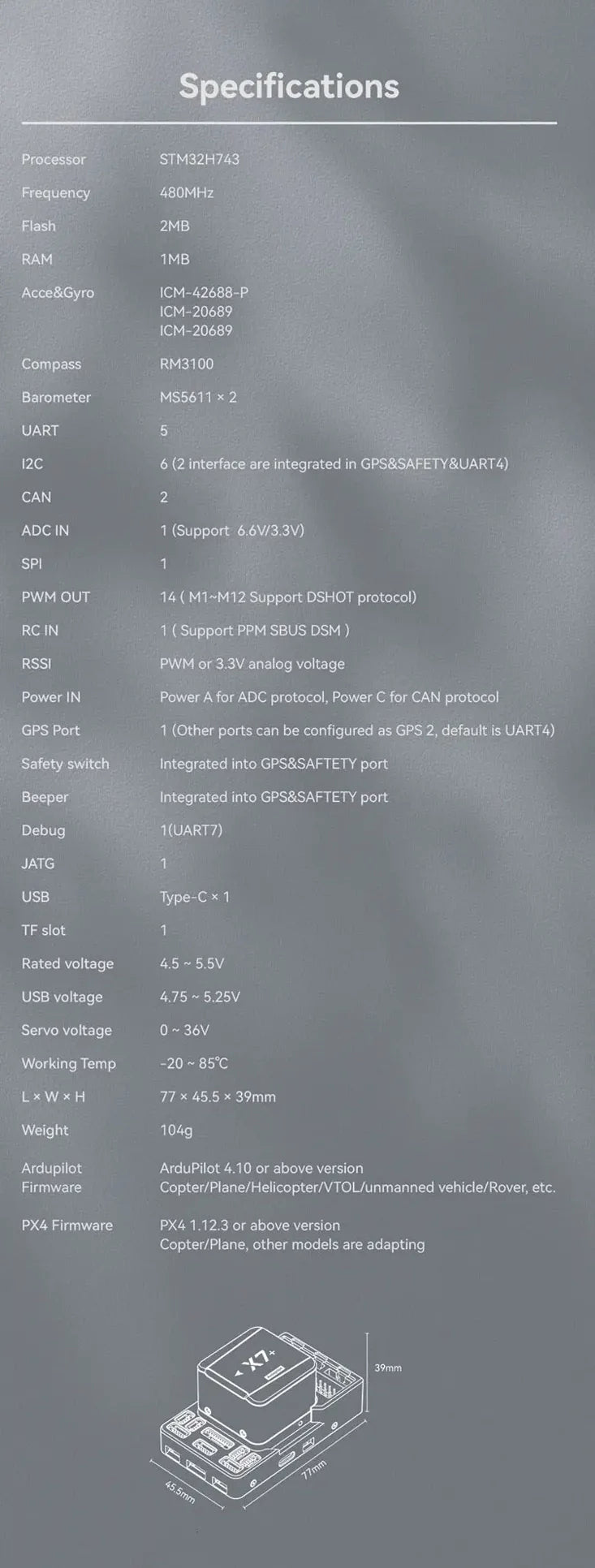
Dane techniczne CUAV X7 Plus
- Interfejsy:
- 2 porty zasilania (zasilanie A to wspólny interfejs ADC, Power C to interfejs baterii uavcan)
- Obsługa wielu wejść RC (SBU / CPPM / DSM)
- 14 wyjść PWM (12 obsługuje Dshot)
- 4 magistrale i2c (dwa dedykowane porty i2c)
- 2 porty GPS (porty GPS i UART4)
- Wejście analogowe / PWM RSSI
- 2 porty magistrali CAN
- 2 wejście ADC
- 1 porty USB
- Czujniki pokładowe:
- Akcelerometr/Żyroskop: ICM-20689
- Akcelerometr/Żyroskop: ICM-20649
- Akcelerometr/Żyroskop: BMI088
- Magnetometr: RM3100
- Barometr: MS5611*2
- Temperatura robocza: -20 ~ 80°c
- Główny procesor FMU: STM32H743
- System zasilania:
- Wejście szyny serwa: 0~36V
- Wejście USB: 4,75~5,25V
- Moc: 4,3~5,4V
- Waga: 101 g
Zawiera
- 1x Standardowy kontroler lotu autopilota CUAV X7+ (dla PX4/APM)
- 1x moduł zasilania CAN PMU Lite
- Karta rozszerzeń CAN 1z
- 1x karta pamięci 16G
- 1x12C/kabel CAN
- 1x moduł Pw-Link
- 1x kabel ADC3.23
- 1x kabel USB-C
- 1x kabel RSSI
DANE TECHNICZNE Kontrolera lotu CUAV X7 Plus
Rozstaw osi: Śruby
Uaktualnij części/akcesoria: Piasta koła
Materiały narzędziowe: Cięcie
Parametry techniczne: Wartość 3
Rozmiar: 77x45x39
Urządzenia peryferyjne/urządzenia do zdalnego sterowania: Silnik
Zalecany wiek: 18+
Części i akcesoria do zdalnie sterowanych pojazdów: OŚ
Ilość: 1 szt.
Pochodzenie: Chiny kontynentalne
Numer modelu: Kontroler lotu X7 Plus
Materiał: Metal
Atrybuty napędu na cztery koła: Silniki
Dla typu pojazdu: Samoloty
CUAV kontroler lotu Open Source dla APM PX4 Pixhawk FPV RC Drone Quadcopter X7 wersja
Główna różnica między X7 ORAZ X7PLUS:
1. Perspektywy są różne,
2.czujnik jest inny
Oto opis X7:
CUAV X7 + opis kontrolera lotu
Kontroler lotu X7+ został wzbogacony o nową gamę czujników, obejmującą wydajny procesor STM32H743, akcelerometr i żyroskop ICM-42688-P oraz kompas przemysłowy RM3100, zapewniające doskonałą nawigację i stabilność w systemach sterowania lotem.

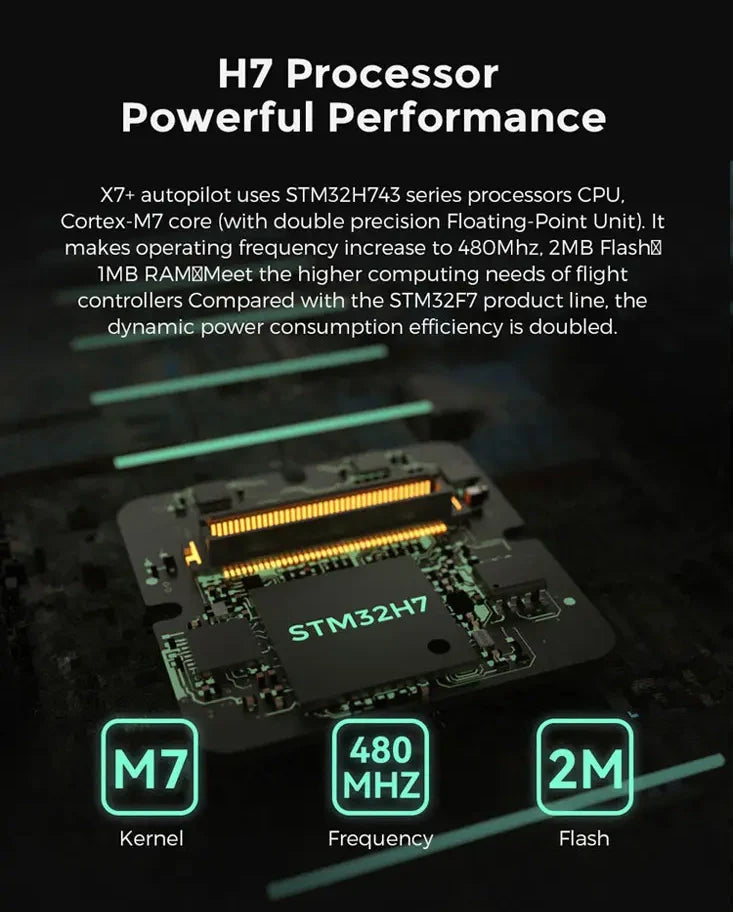
Procesor H7 o dużej wydajności
Autopilot X7+ wykorzystuje procesor serii STM32H743, wyposażony w rdzeń Cortex-M7 wyposażony w jednostkę zmiennoprzecinkową o podwójnej precyzji (FPU), zwiększając jego częstotliwość roboczą do imponującej częstotliwości 480 MHz. Dzięki 2 MB pamięci Flash i 1 MB pamięci RAM spełnia wysokie wymagania obliczeniowe zaawansowanych kontrolerów lotu. W porównaniu do linii STM32F7, STM32H7 oferuje dwukrotnie większą dynamiczną wydajność zużycia energii, zapewniając wysoką wydajność w przypadku złożonych operacji lotniczych.
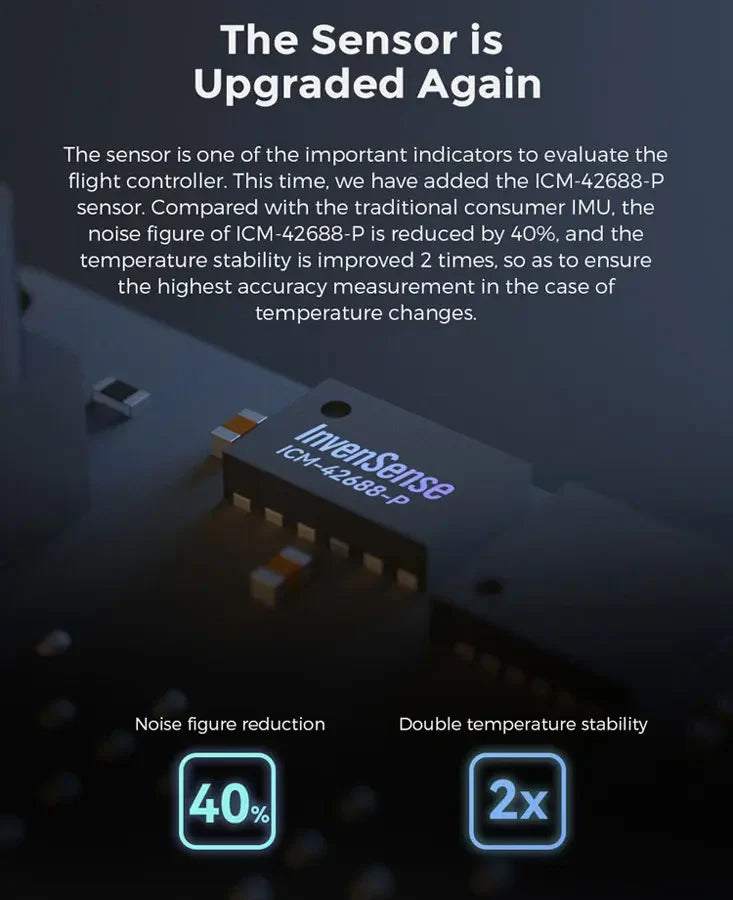
Zestaw czujników kontrolera lotu został znacząco ulepszony poprzez dodanie czujnika ICM-42688-P. To ulepszenie oznacza znaczną poprawę w porównaniu z tradycyjnymi konsumenckimi IMU, z 40% redukcją poziomu hałasu i podwojeniem stabilności temperatury. Takie udoskonalenia zapewniają, że kontroler lotu utrzymuje najwyższą dokładność pomiaru, nawet w przypadku wahań temperatury, podkreślając zaangażowanie w niezawodność i wydajność w zmiennych warunkach środowiskowych.
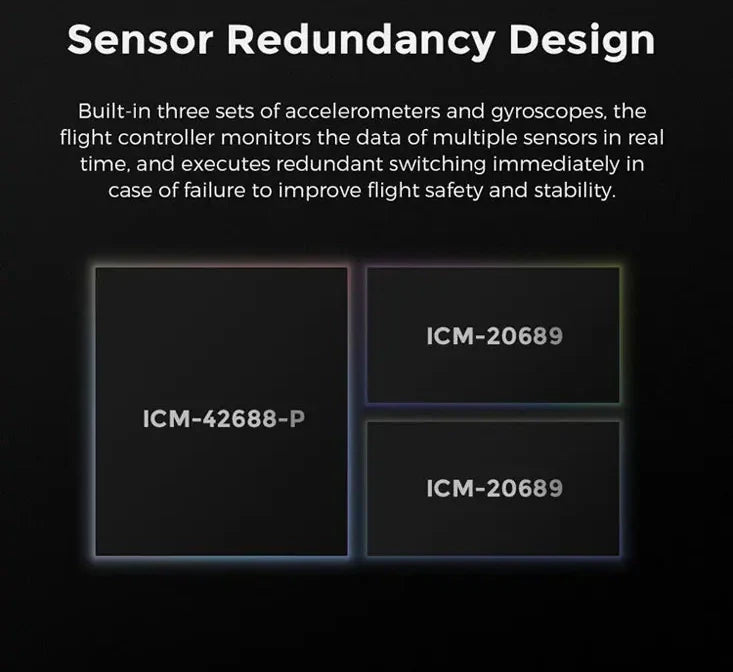
Kontroler lotu ma konstrukcję z redundancją czujników z trzema zestawami akcelerometrów i żyroskopów, w tym modele ICM-20689 i ICM-42688-P. Taka konstrukcja pozwala na monitorowanie w czasie rzeczywistym danych z wielu czujników, umożliwiając systemowi natychmiastowe przełączenie na czujnik zapasowy w przypadku awarii. Ta redundancja zwiększa bezpieczeństwo i stabilność lotu, zapewniając ciągłą, niezawodną pracę nawet w trudnych warunkach.
Układ kompensacji temperatury
Wbudowany, precyzyjny system kompensacji temperatury czujnika sprawia, że czujnik pracuje w stałej temperaturze, zapewniając stabilną pracę czujnika z dużą precyzją i czułością w wysokich i niskich temperaturach
Oddzielny projekt rdzenia
Kontroler lotu X7+ integruje główny MCU i IMU w module CORE i może być sprzedawany osobno. Użytkownicy mogą zaprojektować listwę przypodłogową zgodnie ze strukturą UAV, aby spełnić indywidualne potrzeby użytkowników lub zakupić naszą listwę przypodłogową CAN PDB do użytku. Interfejs X7+ CORE jest kompatybilny z kontrolerem lotu X7, X7 Pro i V5+ CORE. • X7+ < X7+

Lepszy opatentowany system amortyzacji CUAV
Po dziesiątkach iteracji przetestowano i zweryfikowano setki materiałów amortyzujących, przeprowadzono analizę modeli komputerowych i tysiące testów w locie, dzięki czemu można poprawić amortyzację na wyższy poziom Boot

lepszy opatentowany system amortyzacji CUAV. setki iteracji, setki przetestowanych i zweryfikowanych materiałów amortyzujących. dziesiątki testów, komputerowa analiza modeli i tysiące testów w locie.
X7+ AutoPilot jest wyposażony w solidne funkcje bezpieczeństwa i rozwoju, w tym zabezpieczenie nadprądowe dla wyjść 5 V, ograniczające prąd do 2,5 A, a jednocześnie wyposażone w zabezpieczenie przed zwarciem. Do tworzenia oprogramowania sprzętowego wykorzystuje port DSU7 do połączeń konsoli szeregowej i interfejsu SWD, kompatybilny z kablem CUAV FTDI w celu prostego debugowania przez port USB komputera. Co więcej, X7+ obsługuje potrójną redundancję zasilania po podłączeniu do trzech źródeł, zapewniając niezawodność działania. W tej konstrukcji priorytetem jest bezpieczeństwo lotu, stabilność i łatwość rozwoju, co oznacza, że X7+ jest wszechstronną i bezpieczną opcją do zaawansowanych operacji dronów.
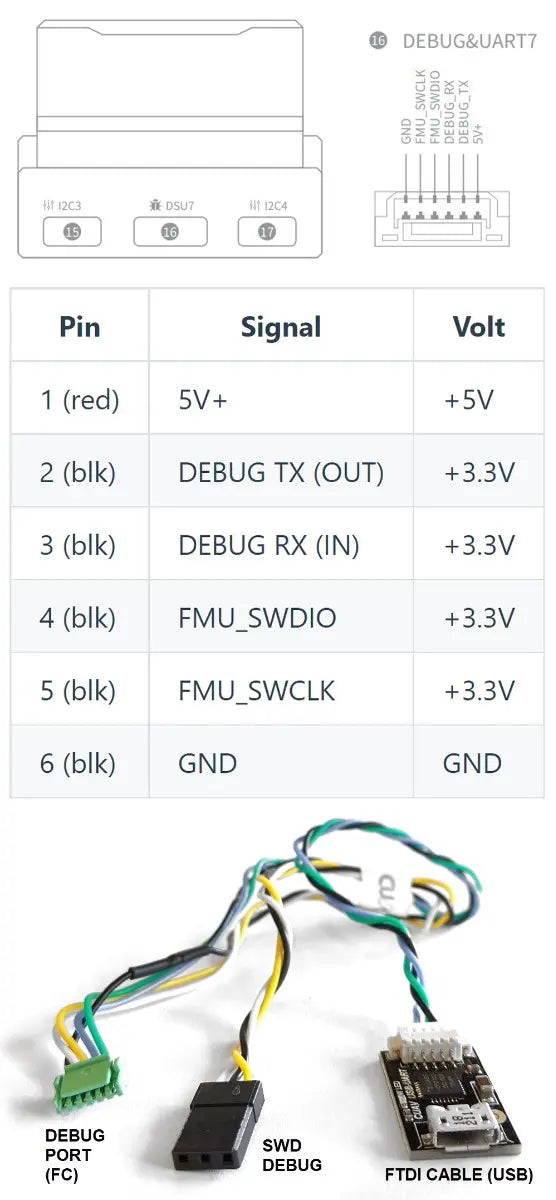
DEBUG&UART7 18 E A 822834 W6 I2C3 DSUT 42C4 Pin Sygnał Wolt (czerwony) 5V+ +5V 2 (blk)
Recenzja kontrolera lotu CUAV X7 Plus
Film z rozpakowywania cuav x7+
instalacja oprogramowania sprzętowego Ardupilot w kontrolerze lotu cuav x7+
Kontroler lotu CUAV X7+ podłączony do pilota SIYI MK15
Related Collections










