






CubeMars AK10-9 V2.0 Siłownik Robotyczny KV60/KV100 | 18Nm/15Nm Moment Znamionowy, Podwójny Enkoder, Tryby MIT i Serwo
CubeMars AK10-9 V2.0 Siłownik Robotyczny KV60/KV100 | 18Nm/15Nm Moment Znamionowy, Podwójny Enkoder, Tryby MIT i Serwo
CubeMars
Nie można załadować gotowości do odbioru
Przegląd
CubeMars AK10-9 V2.0 to wysoko zintegrowany napęd robotyczny, który łączy w sobie wysokowydajny silnik BLDC, reduktor planetarny, podwójne enkodery oraz zintegrowany sterownik w jednej kompaktowej jednostce. Obsługując zarówno tryb zasilania MIT, jak i tryb sterowania serwomechanizmem, zapewnia płynne wyjście momentu, dokładne pozycjonowanie oraz szybką reakcję, co czyni go idealnym do robotów kroczących, egzoszkieletów i AGV. Dostępny w wariantach KV60 i KV100, oferuje do 48Nm momentu szczytowego, z optymalizowanym odprowadzaniem ciepła oraz monitorowaniem temperatury w czasie rzeczywistym dla długoterminowej niezawodności.
Kluczowe cechy
-
Podwójne tryby sterowania: Obsługuje płynne przełączanie między trybem zasilania MIT a trybem sterowania serwomechanizmem dla elastycznej kontroli ruchu.
-
Wysoki moment obrotowy: Do 48Nm momentu szczytowego z stabilną pracą i niskim luzem (0,33°).
-
Wysoka integracja: Łączy silnik, enkoder, sterownik i reduktor planetarny w jednej kompaktowej formie.
-
Wyjście i wewnętrzne enkodery: Zintegrowane 14-bitowe wewnętrzne i 15-bitowe zewnętrzne enkodery magnetyczne zapewniają dokładną informację zwrotną.
-
Łożyska krzyżowe: Zwiększa odporność na obciążenia osiowe i promieniowe, poprawiając niezawodność w dynamicznych aplikacjach.
-
Czujnik temperatury wewnątrz: Monitorowanie temperatury w czasie rzeczywistym zapobiega uszkodzeniu silnika pod wpływem stresu termicznego.
-
Optymalizacja odprowadzania ciepła: Unikalna konstrukcja poprawia zarządzanie ciepłem, zapewniając stabilną długoterminową pracę.
-
Cicha praca: Poziom hałasu tak niski jak 65 dB przy 65 cm (wersja KV60).
Specyfikacje
Specyfikacje AK10-9 V2.0 K60
| Zastosowanie | Robot na nogach, Egzoszkielet, AGV | Maksymalny moment obrotowy (Nm) | 48 |
| Sposób napędu | FOC | Maksymalny prąd (ADC) | 29.8 |
| Temperatura otoczenia pracy | -20℃~50℃ | Kv (obr/min/V) | 60 |
| Typ uzwojenia | gwiazda | Kt (Nm/A) | 0.198 |
| Klasa izolacji | C | Ke (V/krpm) | 17.2 |
| Izolacja Wysokiego Napięcia | 1000V 5mA/2s | Opór międzyfazowy (mΩ) | 195 |
| Opór izolacji | 1000V 10MΩ | Indukcyjność międzyfazowa (μH) | 181 |
| Faza | 3 | Bezładność (gcm²) | 1002 |
| Pary biegunowe | 21 | Km (Nm/√W) | 0.45 |
| Stosunek redukcji | 9:1 | Mechaniczny stały czas (ms) | 0.5 |
| Moment wsteczny (Nm) | 0.8 | Elektrostatyczny stały czas (ms) | 0.93 |
| Luzy (°) | 0.33 | Waga (g) | 960 |
| Czujnik temperatury | NTC MF51B 103F3950 | Maksymalny stosunek momentu obrotowego do wagi (Nm/kg) | 50 |
| Hałas dB w odległości 65 cm od silnika | 65 | Złącze CAN | A1257WR-S-4P |
| Podstawowe oceny obciążenia (dyn. C ) N | 2000 | Złącze UART | A1257WR-S-3P |
| Podstawowe oceny obciążenia (stat.C0) N | 2520 | Złącze zasilania | XT30PW-M |
| Napięcie znamionowe (V) | 24/48 | Typ enkodera wewnętrznego | Enkoder magnetyczny |
| Moment obrotowy znamionowy (Nm) | 18 | Rozdzielczość enkodera pierścienia wewnętrznego | 14bit |
| Prędkość znamionowa (rpm) | 109/228 | Typ enkodera pierścienia zewnętrznego | Enkoder magnetyczny |
| Prąd znamionowy (ADC) | 10.6 | Rozdzielczość enkodera pierścienia zewnętrznego | 15bit |
AK10-9 V2.0 KV100 Specyfikacje
| Zastosowanie | Robot nogowy, Egzoszkielet, AGV | Maksymalny moment obrotowy (Nm) | 38 |
| Sposób napędu | FOC | Maksymalny prąd (ADC) | 41.2 |
| Temperatura otoczenia pracy | -20℃~50℃ | Kv (rpm/V) | 100 |
| Typ uzwojenia | Delta | Kt (Nm/A) | 0.114 |
| Klasa izolacji | C | Ke (V/krpm) | 9.9 |
| Izolacja Wysokiego napięcia | 1000V 5mA/2s | Opór fazy do fazy (mΩ) | 65.5 |
| Opór izolacji | 1000V10MΩ | Indukcyjność międzyfazowa (μH) | 60 |
| Faza | 3 | Bezładność (gcm²) | 1002 |
| Pary biegunowe | 21 | Km (Nm/√W) | 0.45 |
| Stosunek redukcji | 9:1 | Czasowa stała mechaniczna (ms) | 0.51 |
| Moment wsteczny (Nm) | 0.8 | Czasowa stała elektryczna (ms) | 0.92 |
| Luzy (°) | 0.33 | Waga (g) | 960 |
| Czujnik temperatury | NTC MF51B 103F3950 | Maksymalny stosunek momentu do wagi (Nm/kg) | 39.6 |
| Hałas dB w odległości 65CM od silnika | 70 | Złącze CAN | A1257WR-S-4P |
| Podstawowe oceny obciążenia (dyn. C) N | 2000 | Złącze UART | A1257WR-S-3P |
| Podstawowe oceny obciążenia (stat.C0) N | 2520 | Złącze zasilania | XT30PW-M |
| Napięcie znamionowe (V) | 24/48 | Typ enkodera wewnętrznego | Enkoder magnetyczny |
| Moment obrotowy znamionowy (Nm) | 15 | Rozdzielczość enkodera wewnętrznego | 14bit |
| Prędkość znamionowa (rpm) | 205/421 | Typ enkodera zewnętrznego | Enkoder magnetyczny |
| Prąd znamionowy (ADC) | 16.2 | Rozdzielczość enkodera pierścienia zewnętrznego | 15bit |
| Liczba enkoderów | 2 |
Zastosowania
-
Bioniczne roboty na nogach
-
Egzoszkielety do rehabilitacji lub noszenia obciążenia
-
Autonomiczne pojazdy gruntowe (AGV)
-
Systemy kontroli momentu obrotowego
-
Robotyka humanoidalna i czworonożna
Pobrania
![]() Podręcznik sterownika i kontroli serii AK v1.0.15.X.pdf
Podręcznik sterownika i kontroli serii AK v1.0.15.X.pdf
Szczegóły
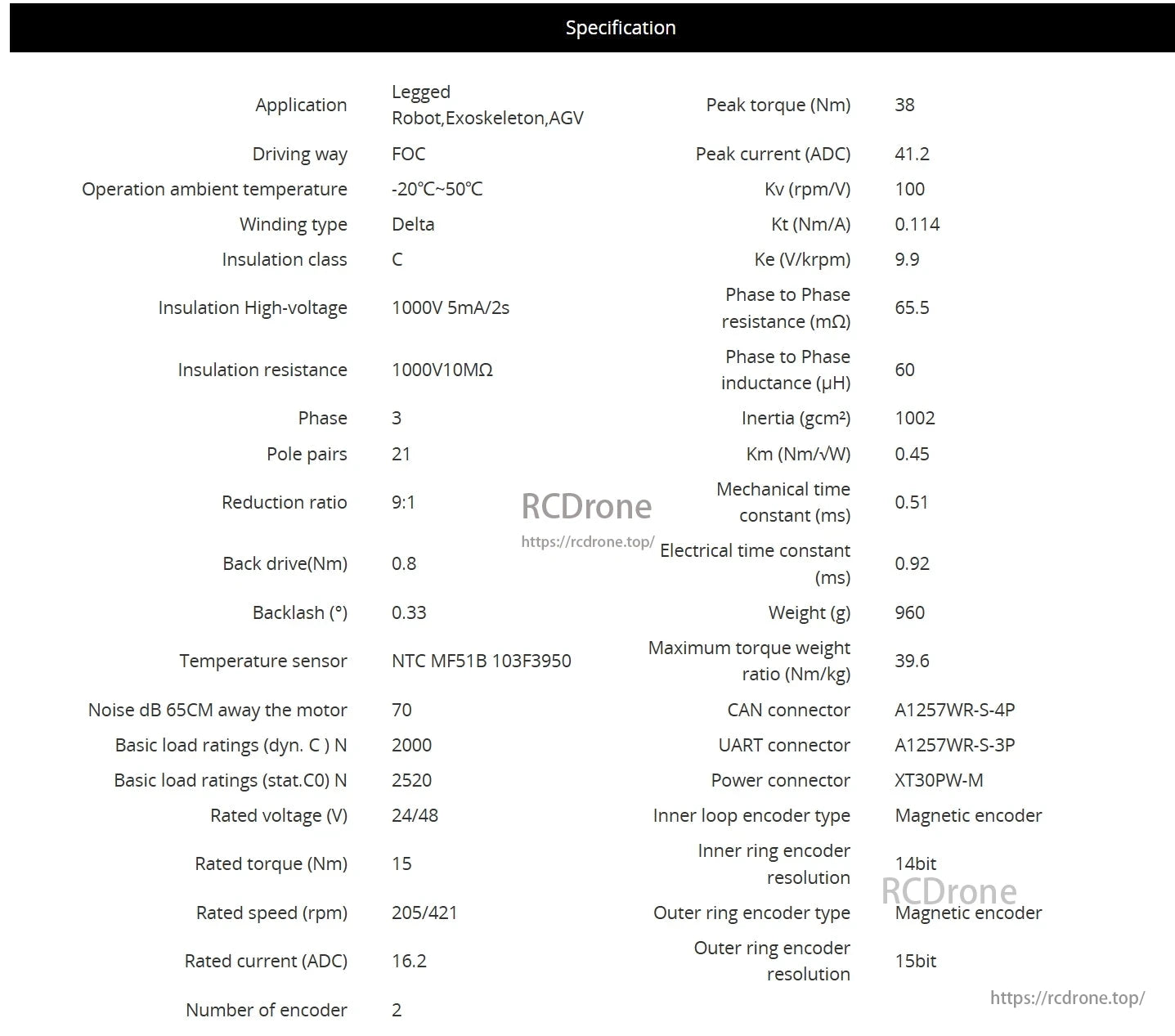
Siłownik robotyczny CubeMars AK10: 38 Nm maksymalny moment obrotowy, 41.2 ADC maksymalny prąd, praca w temperaturze od -20°C do 50°C, 9:1 współczynnik redukcji, waga 960g, maksymalny stosunek momentu obrotowego do wagi 39,6 Nm/kg, hałas 70 dB, enkodery magnetyczne, złącza CAN i UART.

CubeMars AK10 Aktuator Robotyczny: 48 Nm maksymalny moment obrotowy, 29,8 A maksymalny prąd, praca w temperaturze od -20°C do 50°C, izolacja 1000V, 3 fazy, 21 par biegunów, 9:1 współczynnik redukcji, waga 960g, maksymalny stosunek momentu obrotowego do wagi 50 Nm/kg, enkodery magnetyczne.

Wykres analizy dla CubeMars AK10-9 V2.0 KV60@48VDC actuator. Wyświetla moc wyjściową (W), sprawność, prąd (A) i prędkość (RPM) w zależności od momentu obrotowego (N.m). Sprawność osiąga szczyt w okolicach 12 N.m, podczas gdy moc wyjściowa wzrasta stabilnie wraz z momentem obrotowym. Prąd rośnie liniowo, a prędkość maleje w miarę wzrostu momentu obrotowego. Wykres podkreśla charakterystyki wydajności aktuatora, demonstrując jego zdolność do pracy pod różnymi obciążeniami.Kluczowe wskaźniki obejmują maksymalną moc wyjściową przekraczającą 800 W oraz prędkość operacyjną do 350 RPM przy niskich momentach obrotowych. Te dane pomagają w zrozumieniu efektywności siłownika oraz dynamiki mocy w różnych zastosowaniach.
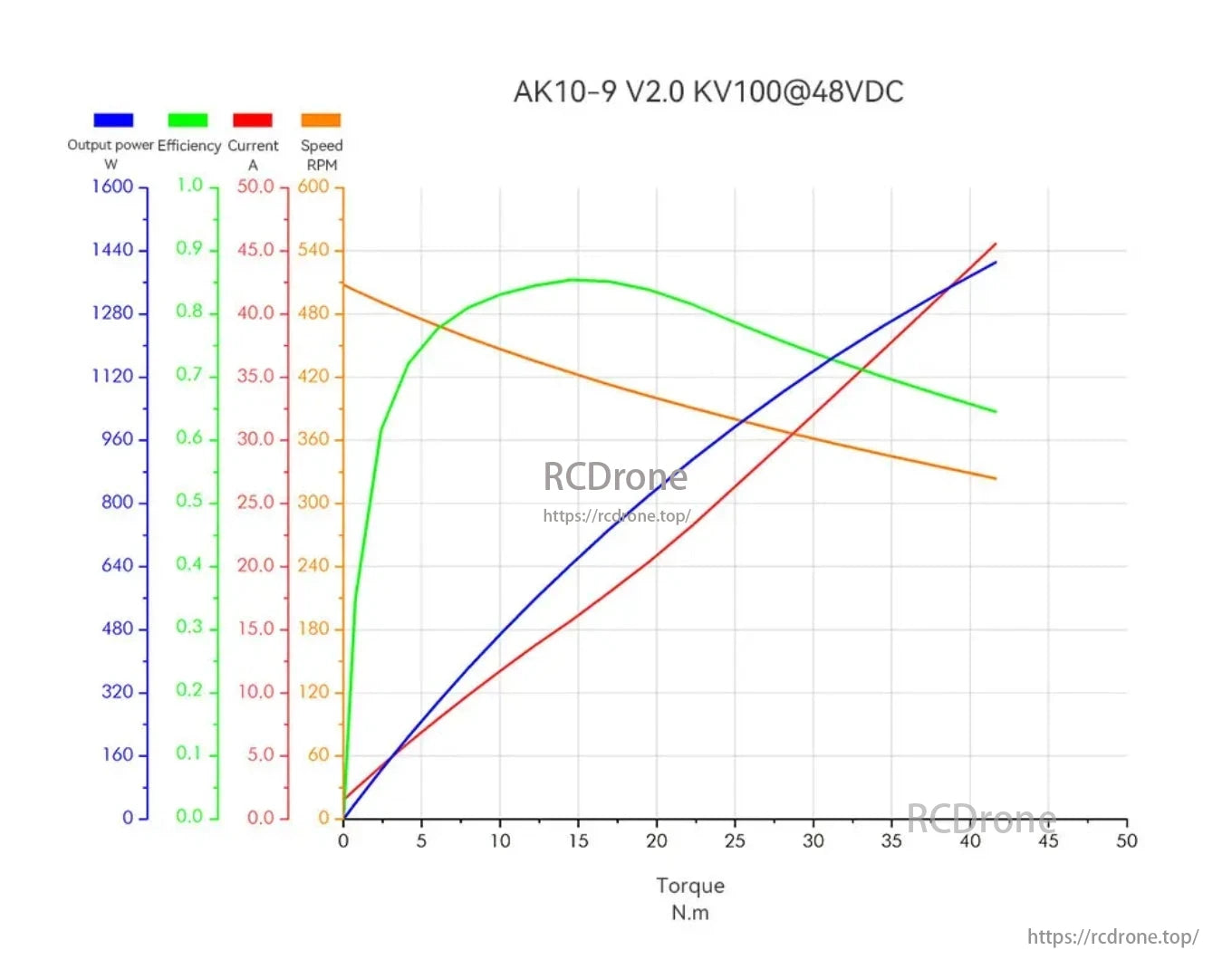
Wydajność siłownika CubeMars AK10-9 V2.0 KV100@48VDC actu jest przedstawiona. Moc wyjściowa (W), efektywność, prąd (A) i prędkość (RPM) są przedstawione w zależności od momentu obrotowego (N.m). Efektywność osiąga szczyt w okolicach 15 N.m, podczas gdy moc wyjściowa rośnie liniowo wraz z momentem obrotowym. Prąd również wzrasta stopniowo wraz z momentem obrotowym. Prędkość maleje w miarę wzrostu momentu obrotowego, zaczynając od około 480 RPM przy zerowym momencie obrotowym. Wykres ilustruje optymalne punkty pracy dla różnych zastosowań, podkreślając możliwości siłownika w różnych warunkach obciążenia. Te dane pomagają w doborze odpowiednich ustawień do konkretnych zadań.

Zintegrowany serwomechanizm mocy CubeMars AK10-9 KV60, w tym tryby. Siłownik robotyczny z certyfikatami FCC, CE, RoHS V2.0 certyfikacja.

Siłownik robotyczny oferuje efektywne sterowanie silnikiem, dokładny tryb zasilania oraz szybszą reakcję w zastosowaniach przemysłowych.

Siłownik robotyczny CubeMars AK10 zawiera silnik BLDC o wysokiej wydajności, przemysłowej jakości łożysko krzyżowe, czujnik temperatury, enkoder wyjściowy, podwójny tryb sterowania oraz reduktor planetarny dla stabilnego momentu obrotowego.

Optymalizuj strukturę i promieniowanie ciepła szybko. Zwiększ odprowadzanie ciepła z obudowy silnika dla długowieczności i stabilności wydajności modułu napędowego. SN: 1010921081.
Related Collections






