





CubeMars AK80-64 KV80 Siłownik Robotyczny – 120Nm Szczytowego Momentu, Przełożenie 64:1, Tryb MIT
CubeMars AK80-64 KV80 Siłownik Robotyczny – 120Nm Szczytowego Momentu, Przełożenie 64:1, Tryb MIT
CubeMars
Nie można załadować gotowości do odbioru
Przegląd
Akumulator CubeMars AK80-64 KV80 Robotic Actuator to wysoko zintegrowana jednostka zasilająca zaprojektowana do robotów kroczących, egzoszkieletów i AGV. Oferując mocny moment obrotowy 48Nm oraz szczytowy moment obrotowy 120Nm, ten aktuator łączy w sobie silnik bezszczotkowy DC, samodzielnie opracowaną przekładnię planetarną 64:1, enkoder magnetyczny 14-bitowy oraz zintegrowany napęd FOC w kompaktowej formie. Wspierając napięcie 6–12S, tryby sterowania MIT i serwo oraz automatyczne strojenie PID, AK80-64 umożliwia precyzyjne i efektywne sterowanie ruchem w aplikacjach o dużym obciążeniu.
Kluczowe cechy
-
Wysoki moment obrotowy: 48Nm nominalny, 120Nm maksymalny moment obrotowy
-
Zintegrowany napęd i enkoder: Ułatwia projektowanie systemu
-
Przekładnia planetarna 64:1: Wysokie przełożenie dla mocnego wyjścia
-
Tryb sterowania MIT: Płynna kontrola pozycji, prędkości i przyspieszenia
-
Szerokie wsparcie napięciowe: Kompatybilny z systemami 24V lub 48V (6–12S LiPo)
-
Kompaktowy i lekki: Tylko 850g, wysoki stosunek momentu obrotowego do wagi
-
Komunikacja: CAN i UART z złączem zasilania XT30PW-M
-
Niski poziom hałasu: ≤60 dB w odległości 65 cm
Specyfikacje
| Zastosowanie | Robot na nogach,Egzoszkielet,AGV | Maksymalny moment obrotowy (Nm) | 120 |
| Sposób napędu | FOC | Maksymalny prąd (ADC) | 19 |
| Temperatura otoczenia pracy | -20℃~50℃ | Kv (obr/min/V) | 80 |
| Typ uzwojenia | Delta | Kt (Nm/A) | 0.136 |
| Klasa izolacji | H | Ke (V/krpm) | 13.7 |
| Izolacja Wysokiego Napięcia | 1000V 5mA/2s | Opór międzyfazowy (mΩ) | 220 |
| Opór izolacji | 1000V10MΩ | Indukcyjność międzyfazowa (μH) | 133.5 |
| Faza | Trzy Fazy | Bezładność (gcm²) | 564.5 |
| Pary biegunowe | 21 | Km (Nm/√W) | 0.29 |
| Stosunek redukcji | 64:1 | Czas mechaniczny (ms) | 0.67 |
| Moment wsteczny (Nm) | 4.7 | Czas elektryczny (ms) | 0.61 |
| Luzy (°) | 0.18 | Waga (g) | 850 |
| Czujnik temperatury | NTC MF51B 103F3950 | Maksymalny stosunek momentu obrotowego do wagi (Nm/kg) | 141.2 |
| Hałas dB w odległości 65 cm od silnika | 60 | Złącze CAN | A1257WR-S-4P |
| Podstawowe oceny obciążenia (dyn. C ) N | 2000 | Złącze UART | A1257WR-S-3P |
| Podstawowe oceny obciążenia (stat.C0) N | 2520 | Złącze zasilające | XT30PW-M |
| Napięcie znamionowe (V) | 24/48 | Typ enkodera wewnętrznego | Enkoder magnetyczny |
| Moment obrotowy znamionowy (Nm) | 48 | Rozdzielczość enkodera pierścienia wewnętrznego | 14bit |
| Prędkość znamionowa (rpm) | 23/48 | Typ enkodera pierścienia zewnętrznego | - |
| Prąd znamionowy (ADC) | 7 | Rozdzielczość enkodera pierścienia zewnętrznego | - |
| Liczba enkoderów | 1 |
Zastosowania
-
Roboty kroczące: Lokomocja humanoidalna i czworonożna
Egzoszkielety: Robotyka wspomagająca i rehabilitacyjna
-
AGV: Precyzyjna kontrola silnika w zautomatyzowanych pojazdach kierowanych
-
Ramiona robotów: Aplikacje przemysłowe i współpracy wymagające wysokiego momentu obrotowego i precyzji
Szczegóły
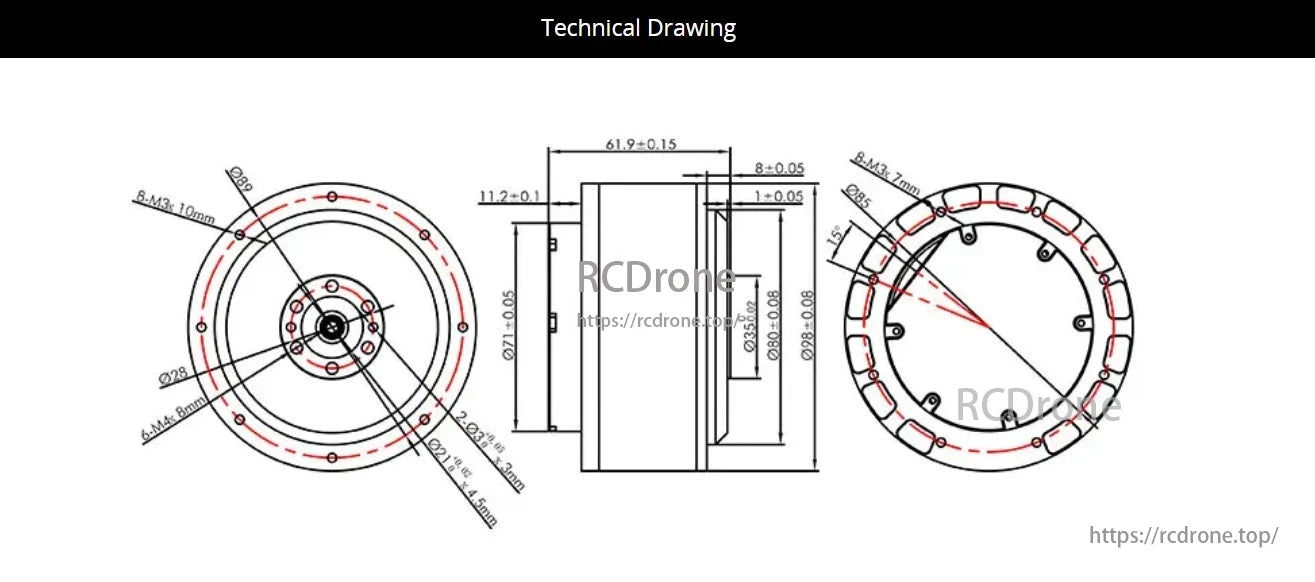
Rysunek techniczny robota CubeMars AK80 z wymiarami i specyfikacjami.
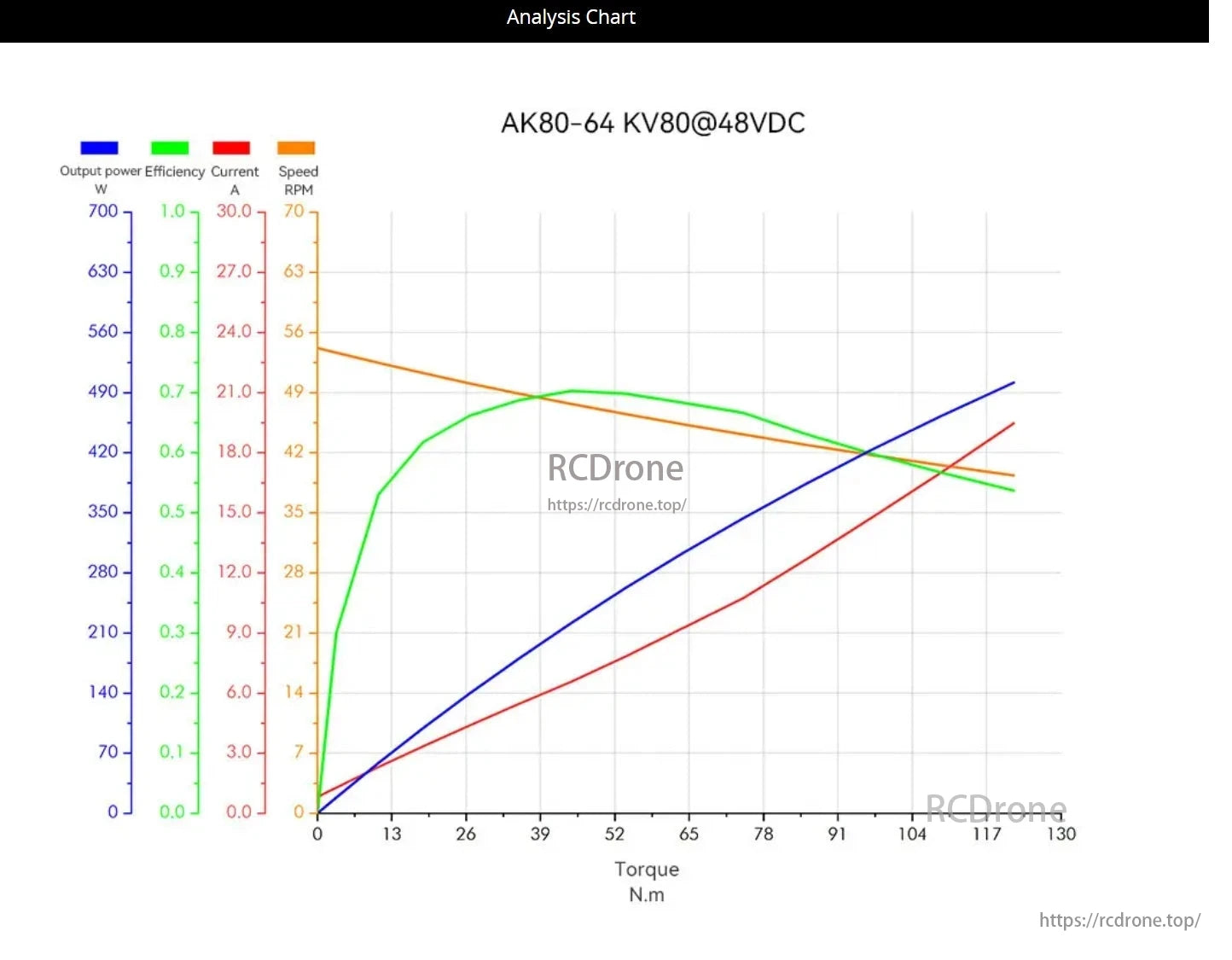
Wykres analizy dla CubeMars AK80-64 KV80@48VDC. Dispprzedstawia efektywność mocy wyjściowej, prąd i prędkość w zależności od momentu obrotowego w N.m. Efektywność osiąga szczyt na poziomie 0,7 przy 52 N.m. Prąd wzrasta liniowo wraz z momentem obrotowym. Prędkość maleje w miarę wzrostu momentu obrotowego, zaczynając od 56 RPM. Moc wyjściowa rośnie stabilnie wraz z momentem obrotowym. Wykres używa niebieskich, zielonych, czerwonych i pomarańczowych linii dla lepszej przejrzystości, z osiami oznaczonymi w watach, amperach, RPM i N.m. Dane ilustrują charakterystyki wydajności silnika przy różnych obciążeniach.

CubeMars AK80-64KV80: moduł dynamiczny o wysokiej integracji, dwa w jednym, do robotyki.

Silnik AK80-64KV80: wysoka integracja, ultra-lekki, wydajny, dynamiczny design.

Praca o niskim poziomie hałasu, silna moc. Niższy moment zrywu, płynna praca, wysoka rozdzielczość, precyzyjna kontrola z dokładnością 0,1°.
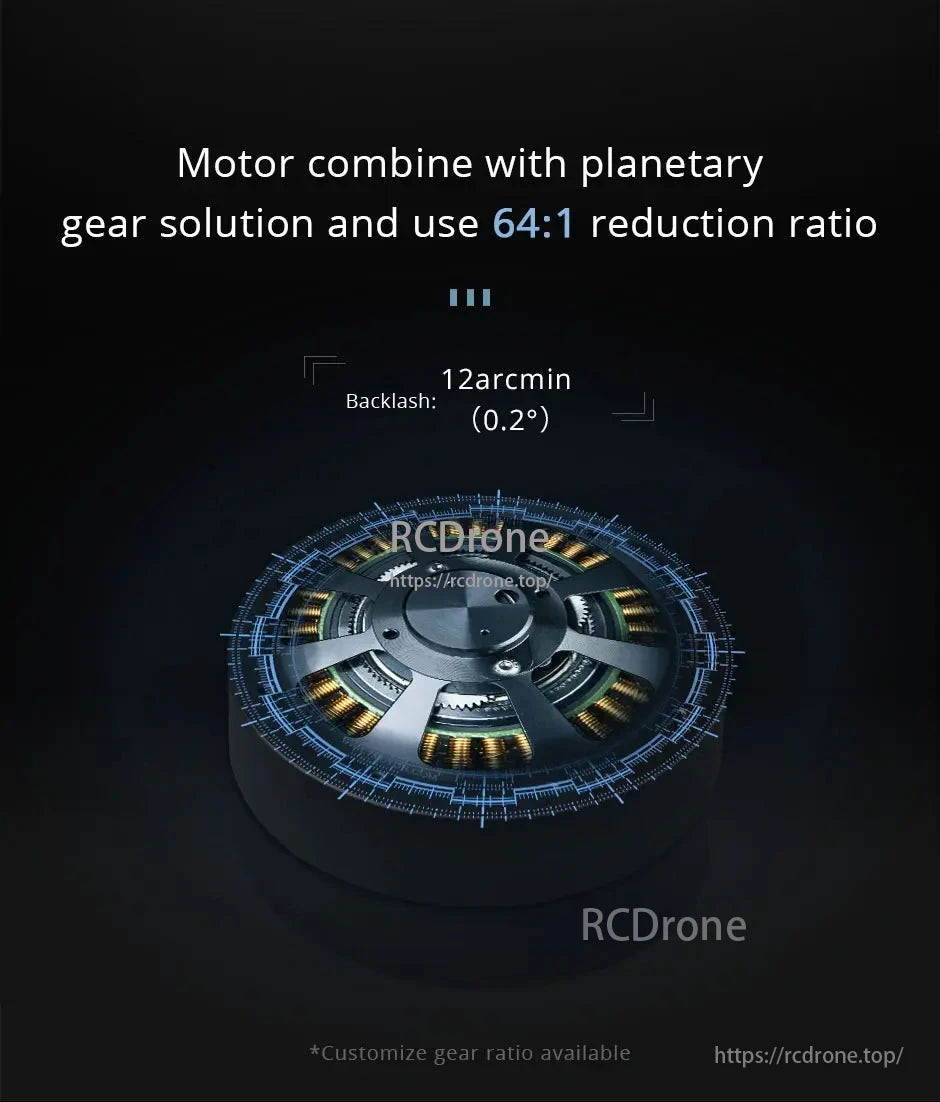
Silnik z przekładnią planetarną, przełożenie 64:1, luz 12 arcmin.
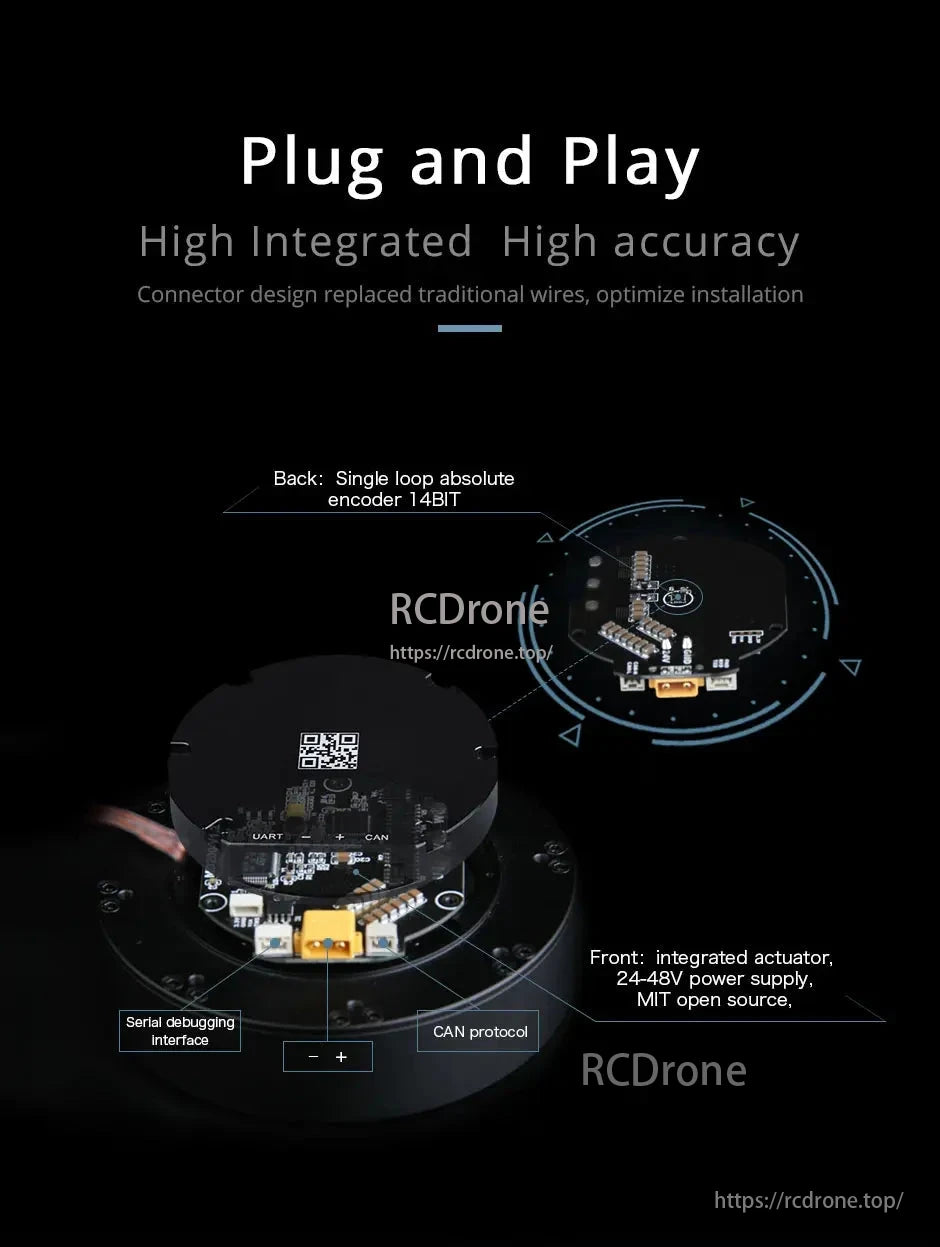
Moduł robota typu plug-and-play, wysoko zintegrowany, precyzyjny, z enkoderem jednobiegunowym, zintegrowanym aktuatorze, zasilaniem 24-48V, protokołem CAN i debugowaniem szeregowym.

Related Collections





