






Siłownik robotyczny CubeMars AKA10-9 KV60 – 18Nm, 48V, wysoki udźwig promieniowy, przełożenie 9:1
Siłownik robotyczny CubeMars AKA10-9 KV60 – 18Nm, 48V, wysoki udźwig promieniowy, przełożenie 9:1
CubeMars
Nie można załadować gotowości do odbioru
Przegląd
Moduł CubeMars AKA10-9 KV60 Robotic Actuator to wysokowydajny moduł napędu quasi-bezpośredniego zaprojektowany do AGV, robotów kołowych oraz innych platform mobilnych wymagających wysokiego momentu obrotowego i solidnej nośności promieniowej. Oferując redukcję zębatą planetarną 9:1, moment obrotowy nominalny 18Nm oraz moment szczytowy do 53Nm, ten aktuator został zaprojektowany z myślą o precyzji i niezawodności na poziomie przemysłowym. W porównaniu do poprzedniego modelu AK10-9, AKA10-9 oferuje 120% poprawy w nośności promieniowej, osiągając 50kg, co znacznie zwiększa trwałość i żywotność.
Moduł zawiera sterowanie FOC, magnetyczny enkoder 16-bitowy oraz nowy zintegrowany projekt wtyczki 2+5PIN dla bezpiecznego i uproszczonego okablowania. Dzięki jednoprzyciskowej konfiguracji, rozpoznawaniu parametrów silnika i braku potrzeby importu oprogramowania układowego, wspiera łatwe debugowanie i szybkie wdrażanie.
Kluczowe cechy
-
Wysoki moment obrotowy: 18Nm nominalny, 53Nm szczytowy
-
Szeroki zakres napięcia roboczego: kompatybilny z systemem 48V
-
Wysokie obciążenie promieniowe: 50kg obciążenia promieniowego, 120% mocniejszy niż AK10-9
-
Zintegrowana przekładnia planetarna: współczynnik redukcji 9:1 dla płynnego wyjścia
-
Projekt wtyczki na zamówienie: wtyczka 2+5PIN z blokadą śrubową dla bezpieczniejszego i bardziej niezawodnego połączenia
-
Enkoder: 16-bitowy enkoder magnetyczny dla wysokiej rozdzielczości informacji zwrotnej o położeniu
-
Niski luz i możliwość odwrócenia: luz 0,15° i 0.8Nm moment obrotowy przy cofaniu
-
Zaawansowane sterowanie FOC: Zapewnia precyzyjną kontrolę prędkości i momentu obrotowego
Specyfikacje
Mechaniczne i ogólne
| Parametr | Wartość |
|---|---|
| Zastosowanie | AGV, Robot kołowy |
| Sposób napędu | FOC |
| Przełożenie | 9:1 |
| Obciążenie promieniowe | 50kg |
| Luzy | 0.15° |
| Moment obrotowy przy cofaniu | 0.8Nm |
| Zakres temperatur | -20℃ do 50℃ |
| Waga | 1060g |
| Pary biegunów | 21 |
| Faza | 3 |
| Typ uzwojenia | Gwiazda |
| Klasa izolacji | C |
| Napięcie izolacji | 1000V 5mA/2s |
| Opór izolacji | 1000V 10MΩ |
| Hałas (w odległości 65 cm) | 50dB |
| Czujnik temperatury | NTC MF51B 103F3950 |
Parametry elektryczne
| Parametr | Wartość |
|---|---|
| Napięcie znamionowe | 48V |
| Obroty na biegu jałowym | 280rpm |
| Prędkość nominalna | 109obr/min |
| Moment nominalny | 18Nm |
| Moment szczytowy | 53Nm |
| Prąd nominalny | 10.6A |
| Prąd szczytowy | 32A |
| Bezład | 1002g·cm² |
| Kv | 60obr/min/V |
| Kt | 0.16Nm/A |
| Km | 0.32Nm/√W |
| Ke | 0.0167V/krpm |
| Opór fazowy | 248mΩ |
| Indukcyjność fazowa | 235μH |
| Czas elektryczny | 0.94ms |
| Czas mechaniczny | 1.90ms |
| Max Współczynnik Momentu do Wagi | 53Nm/kg |
Instrukcje Okablowania
-
Typ Enkodera: Magnetyczny
-
Rozdzielczość Enkodera: 16-bit
-
Złącze: CTZ-5-22 Żeński 2+5PIN Wtyk
-
Układ Okablowania:
-
Czerwony: V+
-
Czarny (x2): V-, GND
-
Żółty: RX
-
Zielony: TX
-
Biały: CAN_H
-
Niebieski: CAN_L
-
Wykres Wydajności (AKA10-9 KV60 @ 48VDC)
-
Demonstracja mocy wyjściowej, wydajności, prędkości oraz prądu w porównaniu do momentu obrotowego.
-
Maksymalna wydajność zaobserwowana przy ~15Nm momentu obrotowego
-
Stabilne wyjście do 53Nm maksymalnego momentu obrotowego
Zastosowania
-
Autonomiczne Pojazdy Kierowane (AGV)
-
Roboty kołowe do obsługi lub logistyki
-
Roboty do transportu medycznego lub inspekcji
-
Mobilne platformy wymagające kompaktowych napędów o wysokim momencie obrotowym
Zwiększona trwałość i debugowanie
AKA10-9 KV60 charakteryzuje się nową konstrukcją, która radzi sobie z wyższymi siłami promieniowymi, idealna do zastosowań z obciążeniami off-center. Debugowanie jest uproszczone dzięki rozpoznawaniu parametrów silnika jednym kliknięciem, konfiguracji prędkości baud UART oraz aktualizacjom parametrów—bez potrzeby importu oprogramowania układowego.
Pobieranie podręczników
![]() Podręcznik produktu modułu serii AKA V3.0.0.pdf
Podręcznik produktu modułu serii AKA V3.0.0.pdf
Szczegóły
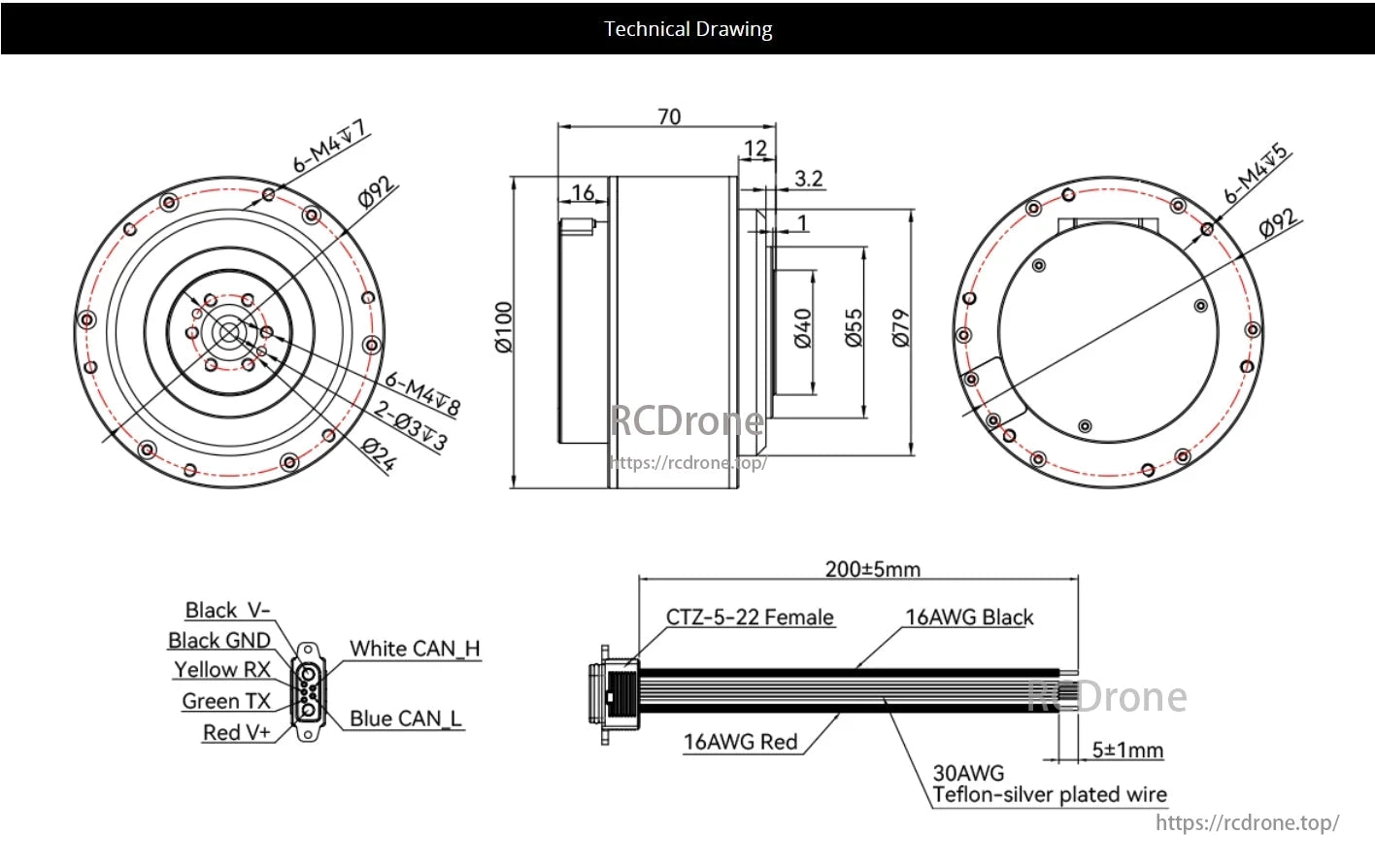
CubeMars Wymiary siłownika robotycznego AKA10-9: 100x70mm, z 6 śrubami M4. Posiada złącze żeńskie CTZ-5-22, przewody 16AWG czarny/czerwony oraz przewód 30AWG pokryty teflonem i srebrem. Zawiera piny CAN_H/L, RX/TX.

Siłownik robotyczny CubeMars AKA10-9: 48V, moment obrotowy 18Nm, prędkość 109rpm, maksymalny moment obrotowy 53Nm. Klasa izolacji C, praca w temperaturze od -20°C do 50°C, waga 1060g, enkoder magnetyczny, rozdzielczość 16-bitowa.
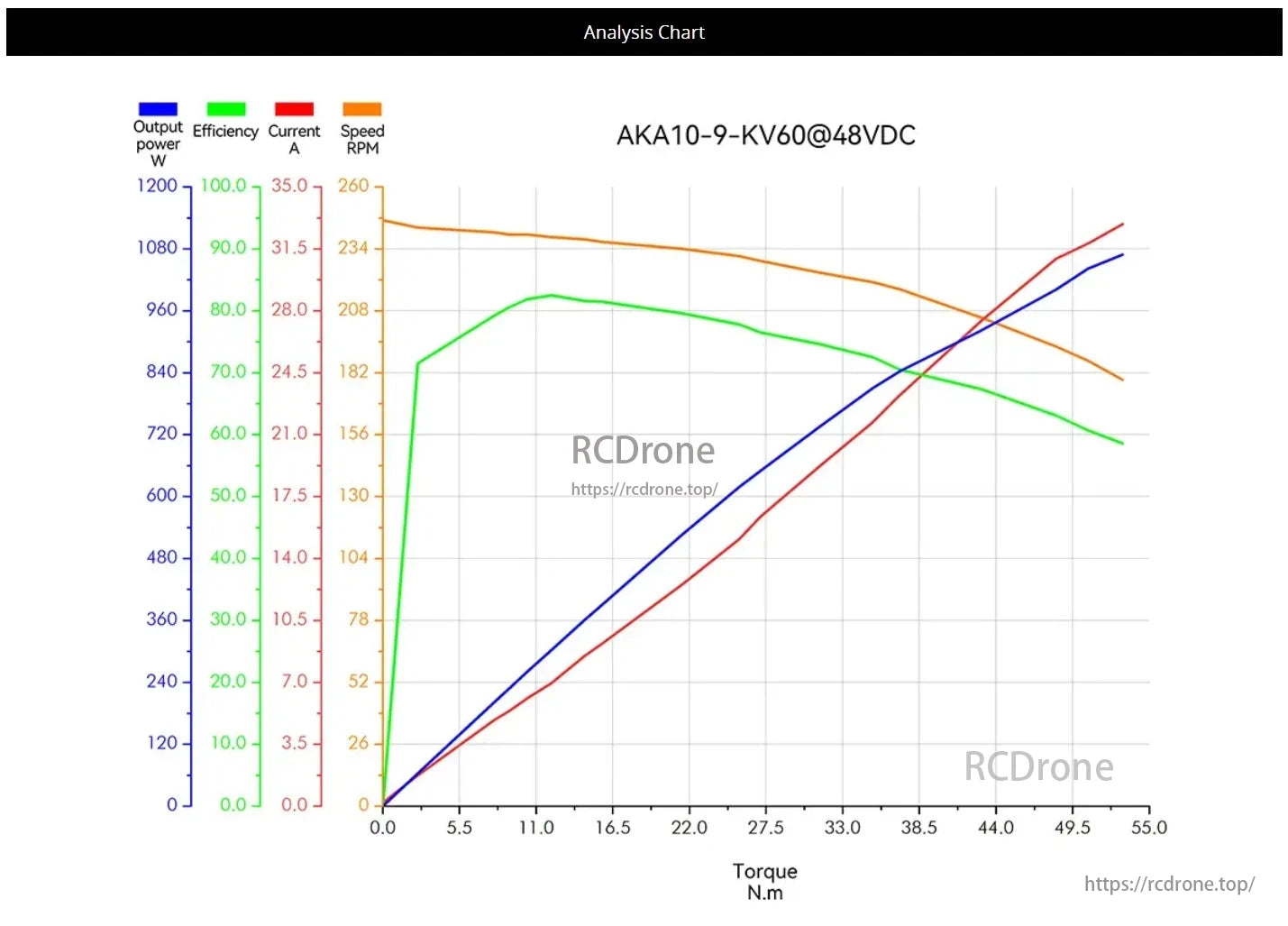
AKK10-9 Siłownik robotyczny wykres analizy pokazuje moc wyjściową, wydajność, prąd i prędkość w porównaniu do momentu obrotowego przy 48VDC, prezentując wydajność przy różnych momentach obrotowych.

CubeMars AKA10-9 Siłownik robotyczny: Nowe rozwiązanie o wysokiej nośności promieniowej, solidna i trwała konstrukcja.

Nowa konstrukcja zwiększa nośność promieniową do 50KG, co stanowi 120% poprawę w porównaniu do AK10-9.

Niestandardowe wtyczki integrują zasilanie, sygnały CAN, UART w projekt 2+5 pin, mocowane śrubami M2 dla bezpieczeństwa i niezawodności.
Aktualizacja sterownika dla łatwego debugowania. Konfiguracja jednym kliknięciem, otwarte parametry, aktualizacja silnika bezproblemowo.
Related Collections






